基于時頻分析的地面運動目標噪聲穩健分類研究
2018-05-04 04:38:42馬艷艷中國船舶重工集團公司第七二三研究所江蘇揚州225101
艦船電子對抗 2018年1期
關鍵詞:分類
馬艷艷(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
雷達目標分類是在基于目標自身特性的前提下,分析雷達回波,實現目標類型判定的過程,比如把飛機目標分為直升機、螺旋槳和噴氣式,把車輛目標分為卡車和裝甲車。雷達照射目標時反射回來的載頻會發生偏移,從而產生了多普勒現象。若目標在平動的同時還有相對的微運動,比如鳥飛翔時翅膀的擺動,卡車運行時輪子的轉動,飛機飛行時槳葉的轉動等,這些微運動在平動多普勒附近產生了調制作用,這種調制現象就叫做微多普勒效應[1]。微多普勒效應反映了目標的運動特性,如果能夠提取有效特征,就可以進一步實現目標分類。目前將微多普勒效應應用于目標分類有了越來越多的研究。文獻[2]分析了履帶式和輪式車輛在微多普勒效應上的差異,提出了在頻域設置門限的方法來對2種目標進行分類。文獻[1]首先分析了不同姿態情況下人體目標對應時頻譜的微動特性,然后提取了分類特征來區分人體的不同姿態。文獻[3]分析了螺旋槳飛機、噴氣式飛機和直升機的微多普勒效應差異,提取了基于經驗模態分解(EMD)和CLEAN算法的分類特征,對3類飛機實現了噪聲穩健性分類。
在雷達自動目標分類問題中,訓練數據的信噪比通常比較高,但實際應用中,回波信號受大氣條件、距離等限制,采集的數據信噪比一般比較低。相對于平動分量來說,微動分量在總能量中所占比例小,容易被噪聲淹沒,因此低信噪比條件下分類性能嚴重下降。并且當雷達發射功率和接收機熱噪聲功率一定時,如果在信噪比較低時依然能對目標實現分類功能,就相當于把雷達目標的分類距離推遠了,因此噪聲穩健的目標分類也是一個有重要意義的研究內容。
1 車輛和人體微動特性分析
本節對履帶式車輛和人體目標的運動特性分析均是基于實測數據實現的,采樣時間為1.2 s,其中履帶式車輛的上履帶分為遮擋和裸露2種情況,人體目標的姿態為行走。履帶式車輛除了車身的平動,還有履帶的微運動,履帶的微運動為剛體模型, 雷達姿態角合適時,多普勒譜的譜寬是由平動速度v決定的,履帶產生的微動分量位于0~2v之間[2,4],譜和時間并沒有函數關系。人體組成中軀干所占比重最大,能量也最大,由于行走時重心的擺動,軀干在時間上是有周期性變化的,四肢在隨著軀干平動的同時還有微運動,微運動的頻率取決于平動速度,幅度取決于四肢長度。假設擺動頻率W0,幅度A0,初始角θ0,微運動的表達式為A0sin(W0t+θ0),可知人體的微運動曲線與時間是三角函數關系[5]。圖1為2類目標的時頻分析圖,其中(a)、(b)為行走的人體目標,(c)、(d)為運動的履帶式車輛目標。與理論分析是一致的,人體行走時軀干分量的比例在所有諧波分量中是最大的,頻率隨時間周期性變化,四肢運動的時頻譜是疊加在軀干分量上的三角函數曲線。履帶式車輛的時頻譜隨時間變化并不明顯,車身分量在時頻譜中所占比例最大,若裸露的上履帶被雷達照射到,上履帶在2v對應的頻率處產生一個比較強的分量。
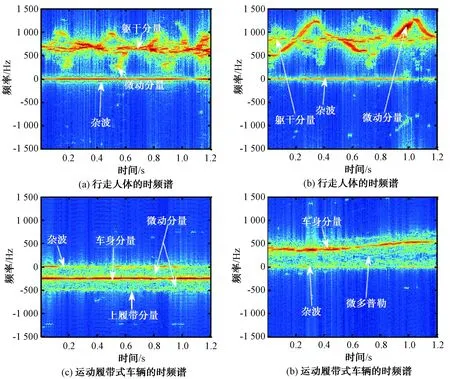
圖1 去雜波之前履帶式車輛的實測多普勒譜
綜上可知,履帶式車輛和人體目標的時頻譜在隨時間變化的周期性上有著很顯著的差別,可以作為履帶式車輛和人體目標分類特征提取的出發點。
2 基于時頻分析的特征提取
第1節在實測數據的基礎上分析了履帶式車輛和人體目標的時頻圖,指出了2類目標時頻譜的差異,下面提出三維特征來描述這種差異。
雷達回波作為目標散射點回波的疊加,表達式如下:
(1)
式中:γi(t)和ai分別表示第i個散射點在雷達視線的距離和散射系數;k為目標散射點的總數目;f0為載頻;c為光速。
對s(t)做時頻分析變換表示如下:

(2)

第一維特征,時頻熵[6]:
(3)

時頻譜反映信號瞬時頻率的能量分布,能量越分散熵就越大,因此人體目標的時頻熵比車輛大。
第二維特征,平均瞬時多普勒譜的熵[7]:
(4)
時頻譜S(t0,f)對應于某時刻所有散射點的瞬時頻率。g(t)表示散射點瞬時頻率的線性組合,所以g(t)的FFT對應于散射點的瞬時頻率F(f)。
第三維特征,平均瞬時多普勒譜最大值所占比重[7]:
f3=max(ρ)
(5)
第三維特征描述的是平均瞬時多普勒譜中最大值與時頻譜總能量的比,反映的是最大值占總能量的百分比。經過歸一化處理后,哪個目標的最大值大,對應的第三維特征值就大。
對圖1的分析可知,人體目標行走時軀干分量隨時間的變化與人體重心的變化一致,微動分量隨時間的變化也是周期性的。而運動車輛的時頻譜中,車身和微動分量隨時間的變化并沒有明顯的周期性,并且微動分量比車身分量的能量小得多。可以得出,行走人體目標時頻譜的集中度比車輛小,對應的熵比運動車輛的要大。多普勒譜對應于回波包含的頻率分量,對瞬時多普勒的均值做快速傅里葉變換,可以估計出雷達積累時間中的瞬時多普勒信息。因此行走人體目標和運動車輛目標的差異性可以用這三維特征來描述[8-11]。
3 基于正交基重構的噪聲修正方法
正交基重構算法實現去噪的基本思路是利用從大到小的順序對雷達時域諧波進行重構,并依次把重構的諧波分量從原回波信號中減掉,當剩余信號的能量不大于噪聲功率時,則認為剩余的信息是由噪聲產生的,重構的信息就是無噪的時域回波信號。
雷達回波可以表達為信號和噪聲疊加的形式:

(6)
式中:fm為多普勒頻率;K為散射點數目;w(t)~CN(0,σ2),表示接收機的熱噪聲。
用傅里葉基表示為:
x=Ba+w
(7)

(8)
(9)

于是將去噪后的信號表示為:
(10)
4 分類實驗
本小節的實驗是基于實測數據實現的,其中訓練數據為高信噪比的,測試數據是對高信噪比數據人工加入不同信噪比的高斯白噪聲得到的,分類器選擇支撐向量機(SVM),選擇高斯核,保持不同信噪比時的核參數為同一個值。圖2所示為實驗流程。
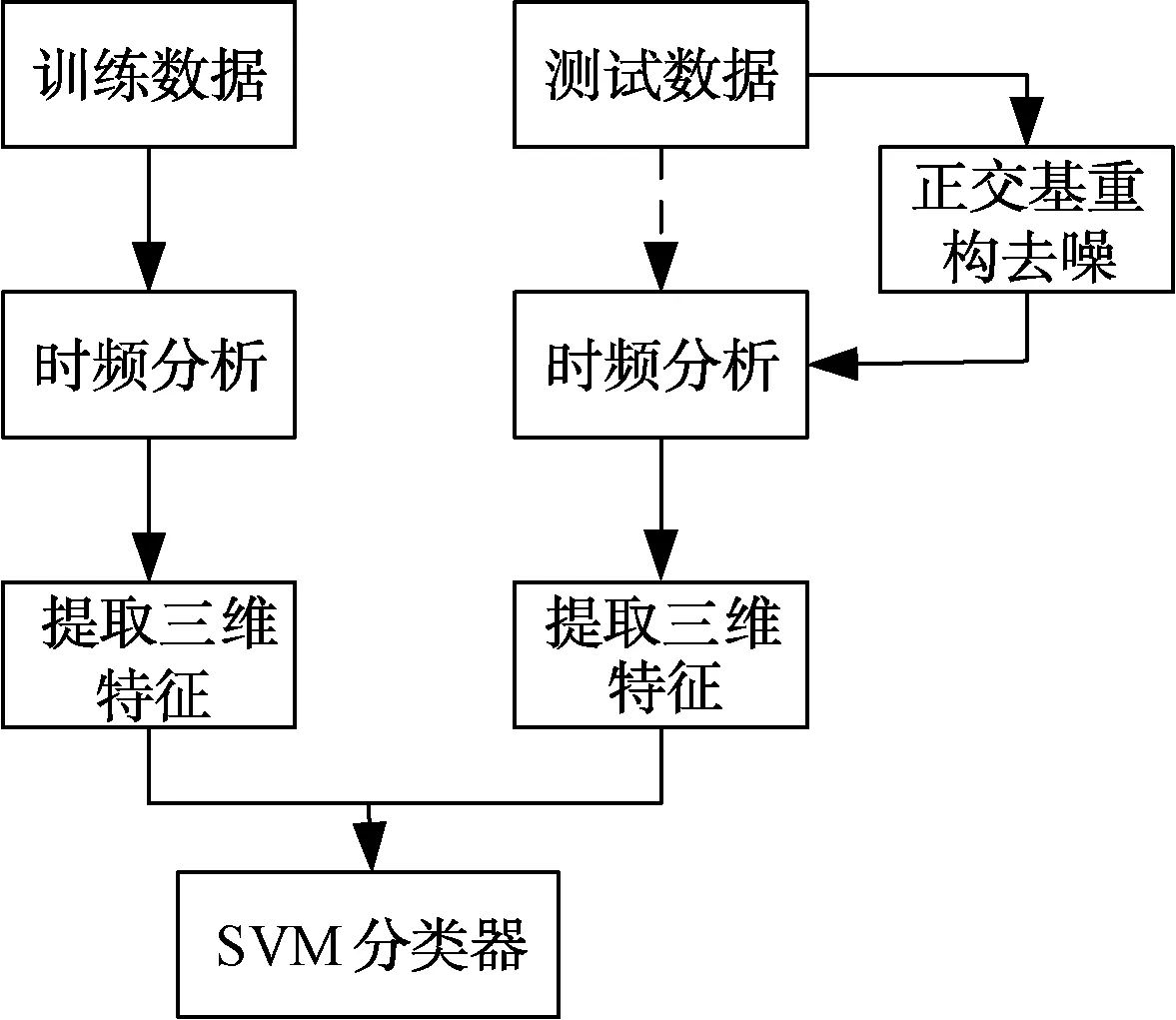
圖2 實驗流程圖
圖3(a)為運動車輛目標信噪比為40 dB的時頻譜,(b)為信噪比將到10 dB時的時頻譜,(c)為用本文所提方法去噪后的時頻譜。圖4(a)為行走人體目標信噪比為40 dB的時頻譜,(b)為信噪比將到10 dB時的時頻譜,(c)為用本文所提方法去噪后的時頻譜。
由上圖可以看出,履帶式車輛的時頻譜信噪比降為10 dB時,有些地方的噪聲能量和履帶產生的微動分量相近,當使用正交基重構方法去噪后有效保留了微動成分。人體目標信噪比降到10 dB時微動分量被噪聲污染,依靠微動特征的分類性能嚴重下降。對比信噪比為40 dB和去噪后的時頻譜可見,基于正交基重構的去噪方法可以減弱噪聲的影響。分別將從含噪時頻譜和進行噪聲修正后的時頻譜提取的三維特征代入SVM,可得圖5所示分類結果隨信噪比的變化曲線,其中實線為含噪特征的分類結果,虛線為使用本文所提的噪聲修正方法后的分類結果。可見,對不進行去噪處理的原始譜特征來說,當信噪比高于20 dB時,噪聲分量對微動分量的影響很小,正確分類性能可以達到90%;但隨著信噪比的下降,微動分量逐漸被淹沒,識別性能也迅速下降,當信噪比低于10 dB時,基于微動分量提取的三維特征甚至失去了分類能力。使用基于正交基重構的去噪方法進行噪聲修正后,信噪比在10 dB時,分類性能可以提高到85%;信噪比在0 dB和5 dB時,分類性能也不低于70%,驗證了本文所提噪聲修正方法的有效性。
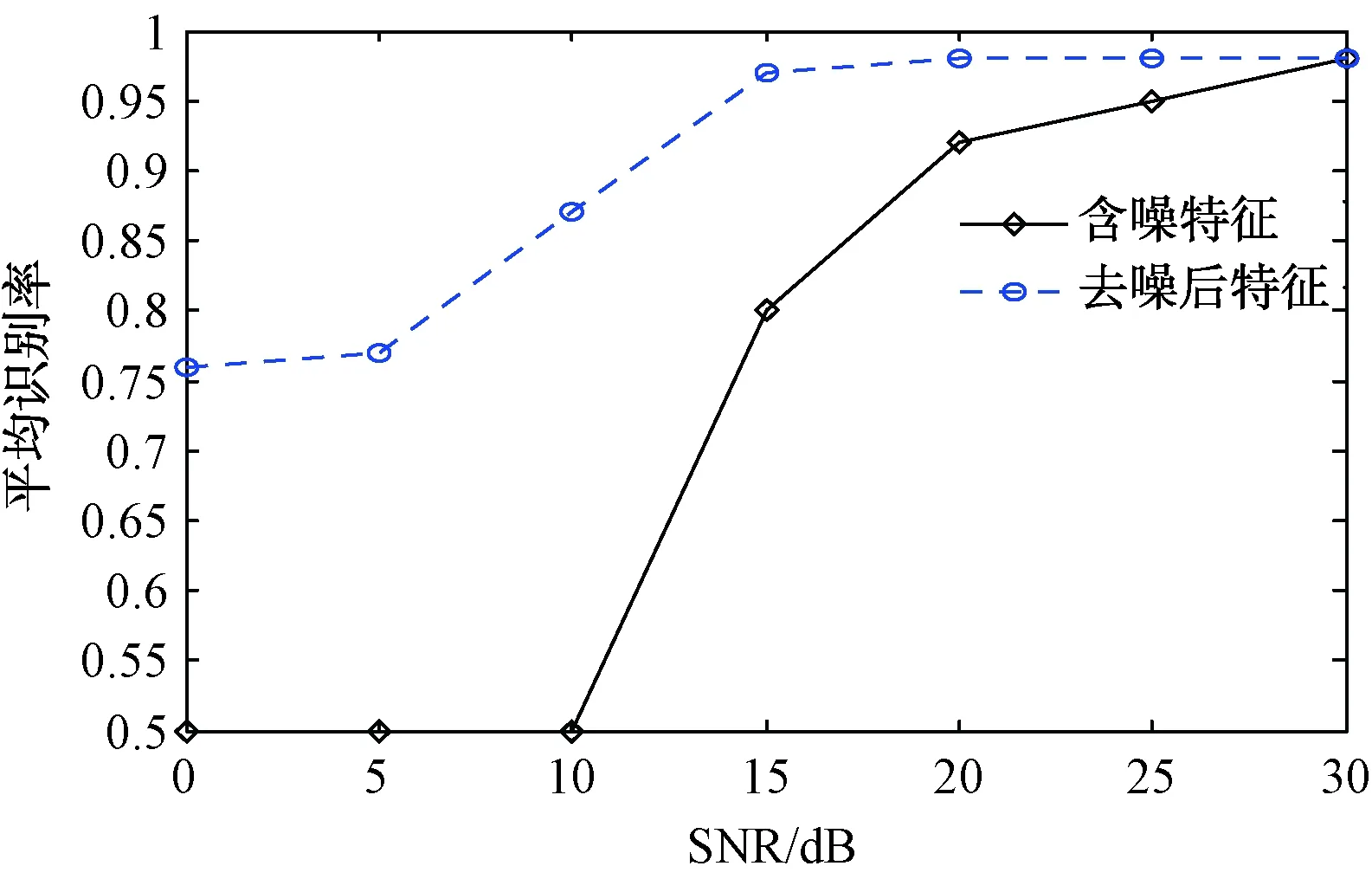
圖5 噪聲修正前后平均識別率隨信噪比變化曲線
[1] CHEN V C.Doppler signatures of radar back scattering from objects with micro motions[J].IET Signal
Processing,2008,2(3):291-300.
[2] 李彥兵,杜蘭,劉宏偉,等.基于微多普勒特征的地面目標分類.電子與信息學報,2010,12(32):2848-2853.
[3] DU L,WANG B S,LIU H W.Robust classification scheme for airplane targets with low resolution radar based on EDM-CLEAN feature extraction method[J]. IEEE Sensors Journal,2013,13(12):4648-4662.
[4] 李彥兵.基于微多普勒效應的運動車輛目標分類研究[D].西安:西安電子科技大學,2013.
[5] STANKOVIC L,DJUROVIC I,THAYAPARAN T,Separation of target rigid body and micro-Doppler effects in ISAS imaging[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(4):1496-1506.
[6] 吳援明,梁恩志.一種基于熵的方法后圖像質量的評價方法[J].信號處理,2004(2):201-203.
[7] 王璐.微動目標的運動參數估計和識別方法研究[D].西安:西安電子科技大學,2010.
[8] KIM Y,LING H.Human activity classification based on micro-Doppler signatures using a support vector machine[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(5):1328-1337.
[9] 賈濤,張禹田.地面雷達動目標自動識別分類研究[J].電訊技術,1998,38(2):35-40.
[10] THAYAPARAN T,ABROL S,RISEBOROUGH E,et al.Analysis of radar micro_Doppler Signatures from experimental helicopter and human Data[J]. IET Radar,Sonar and Navigation,2007,1(4):289-299.
[11] DU L,MA Y Y,WANG B S,et al.Noise-robust classification of ground moving targets based on time-frequency features from micro-Doppler signature[J].IEEE Sensors Journal,2014,14(8):2672-2682.
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46