一種MBR約束下的高分光學影像直角建筑物提取與標繪方法
2018-05-04 07:01:42李百壽李靈芝
測繪通報 2018年4期
李百壽,李靈芝,張 強
(1. 桂林理工大學測繪地理信息學院,廣西 桂林 541004; 2. 廣西空間信息與測繪重點實驗室,廣西 桂林 541004)
隨著遙感技術的快速發展,光學遙感影像的分辨率不斷提高,采用多層次目標識別[1],柵格與矢量處理結合[2],利用影像顏色、形狀、紋理、空間關系等圖像特征,進行建筑物的自動識別和標繪一直是國內外研究的熱點問題[3]。其中如何充分利用建筑物的幾何特征[4]進行建筑物角點檢測[5-6]、邊緣線檢測[7-8]、建筑物輪廓構建[9-10]及主方向求取[11],成為了研究中的重點。
張正通過分層次目標過程模型描述建筑物輪廓,并通過角點檢測方法自動標繪出目標矢量形狀,建筑物標繪精度達到91.2%[1],可用于多類城區建筑物的自動標繪。還可以通過機器學習,建筑物輪廓構建采用兩個反向神經網絡分別用來生成初始化建筑物輪廓和刪除無用輪廓信息,根據感知器內柵格排列的情況訓練神經網絡,確定出建筑物輪廓描述的規則,實現建筑物聚集區域的標繪[9]。
利用圖像邊緣檢測技術獲取建筑物的邊緣輪廓信息,然后通過對邊緣輪廓進行篩選、優化及填充等操作提取出了完整的建筑物邊界[2]。孫金彥結合SVM多類分割算法和數學形態學方法粗略得到建筑物的候選斑塊,通過高斯邊緣模板匹配的矢量化方法細化建筑物輪廓信息。矢量化結果平均準確度為89%、完整度為98%、幾何形狀相似性為87%、整體質量為85%[2]。呂鳳華基于模式識別和場景分析思想,通過HOG識別建筑物中心部分,再由紋理光譜融合特征剔除干擾地物,這種多層次特征結合的方法可細化建筑物的邊緣信息,其中建筑物正確檢出率96%以上,錯檢率為12%[12]。
基于細化的建筑物標繪方法精度較高,但較費時,需要利用種子區域生長、hough直線檢測技術,不能直接提取圖形的線寬等信息[13-14]。例如QI Min等提出了一種從單一的遙感影像中自動提取建筑物的直線輪廓信息。首先提出一種獲取初始種子點區域生長的方法,隨后以Canny邊緣圖輔助區域生長策略選擇分離閾值去除非建筑物部分,最后屋頂被細化后并配用直線擬合的算法來獲得直線邊界,將直線輪廓通過邊界跟蹤提取[15]。程效軍提出一種綜合多種數據提取建筑物輪廓,通過建筑物同名角點將機載雷達點云與航空影像進行配準,根據融合影像對建筑物輪廓進行精確提取[16]。多源遙感數據的綜合運用雖然可以進行精細化提取,但是需同時獲取高分影像數據和機載雷達點云數據,不僅增加了數據獲取難度且花費成本較高。
本文基于分層次目標提取的基本方法,提出一種最小外包矩形(MBR)約束下的高分光學影像直角建筑物標繪方法。先通過CART分類樹結合面向對象的方法粗提取建筑物的輪廓信息,再通過構建角點方向決策器確定建筑物的角點及其順序,最后連接各個角點自動標繪出光學影像中的建筑物。
1 MBR約束下的建筑物提取與標繪
1.1 建筑物提取與標繪方法流程
MBR約束下的建筑物提取和標繪技術流程如圖1所示,詳細步驟如下:
(1) 將高分辨率遙感影像通過面向對象的方法進行多尺度影像分割,根據影像特征將同質區域分割成多個子區域。
(2) 從分割后影像選取一定量有代表性的數據作為樣本對象特征數據,導出其屬性信息,通過SPSS分類模塊中的CART分類方法,確定各屬性的重要性。
(3) 選取重要性前三的屬性進行訓練,獲取CART分類樹分裂節點閾值,建立規則信息。
(4) 根據在SPSS中建立起的CART規則信息,在eCognition中重新建立軟件能夠讀取的分類規則,提取出建筑物所在區域。
(5) 通過形態學變換修復提取的建筑物區域,首先利用數學形態學處理步驟(4)提取的建筑物區域,去除提取的建筑物的“毛刺”“空洞”等問題區域。并通過Candy算子進行建筑物輪廓粗提取。
(6) 根據步驟(5)提取的建筑物輪廓,計算最小面積的MBR,并確定建筑物的主導方向。
(7) 計算建筑物各邊到MBR的一對直角邊的距離,利用聚類的方法把所得到的距離值分成N類,每一類用其平均值D表示距離直線的距離,N表示建筑物的邊數。
(8) 將N個距離值對應的MBR邊平移D個單位以此來擬合建筑物邊緣線;計算各個直線的交點,以此來表示建筑物的角點或者位于邊界線上的點。
(9) 確定角點的行走方向,然后根據行走方向將各點按指定的順序連接起來形成的直角多邊形就是標繪的最終結果。
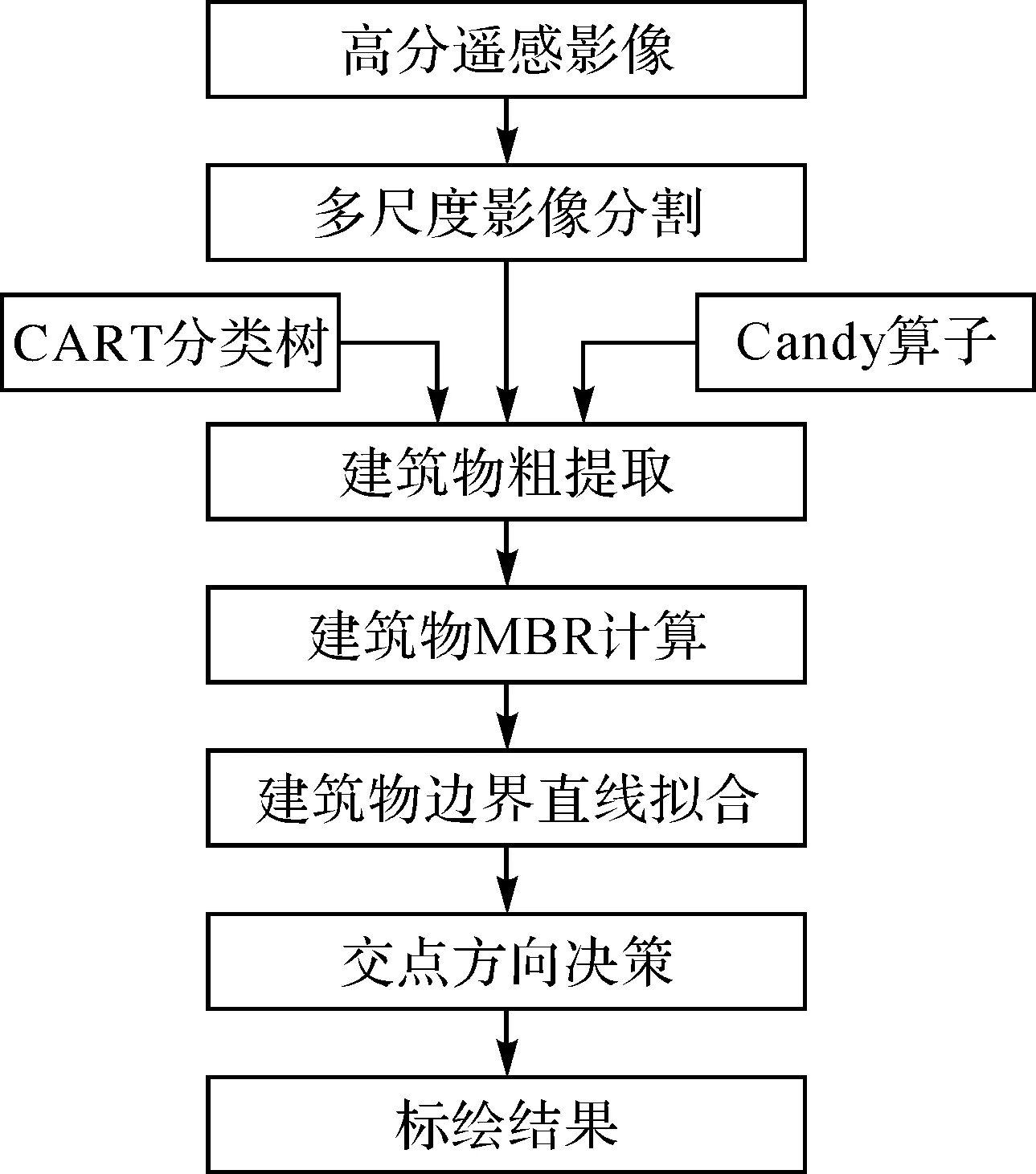
圖1 建筑物提取與標繪技術流程
1.2 CART決策樹結合多尺度分割提取建筑物區
1.2.1 CART決策樹
CART決策樹在遙感影像分類中得以有效地應用。其基本思想是根據一定的分類規則,把遙感影像數據一分為二的向下劃分,最終得到屬性不同的子類。
決策樹中每一個子節點表示一個決策,不同的決策選擇影響著葉節點表示的決策結果。CART算法采用的是二元遞歸分割的方法將樣本集逐級劃分形成二叉樹。分割的評價策略為
(1)
式中,T為決策樹的某個節點;m為類別集因變量數目;Ci為類別;pi為類i在T中的相對概率。當i在T中為傾斜時,gini(T)最小。當gini(T)=0時,所有樣本屬于同一類,當所有類在節點中表現為相同的概率時,gini(T)最大化。衡量出某個屬性的GINI指數后,可以得到ginisplit(T)數據
(2)
式(2)被稱為GINI信息增益,在CART中,選擇其中最小的信息增益作為結點劃分決策樹。訓練數據集T中的屬性F將T分成T1和T2,給定劃分的GINI指標
(3)
對于離散值屬性,在算法中遞歸的選擇該屬性產生最小GINI指標的子集作為它的分裂子集。
1.2.2 融合CART決策樹和多尺度分割方法提取建筑物區
根據影像的特征,對影像進行多尺度分割將不同質區域分割成多個子區。從分割后的遙感影像子區選擇一定量的、有代表性的數據作為樣本。從eCognition中導出樣本數據屬性信息。利用SPSS分類模塊中的CART分類方法檢測各個屬性的重要性。根據選取重要性排在前三的屬性,獲取CART分類樹分裂節點的閾值。利用SPSS中CART功能,選擇相應的屬性進行訓練,就可以直接獲取閾值。根據閾值做出CART分類樹的示意圖如圖2所示。

圖2 CART規則樹建立
根據在SPSS中建立起的CART規則信息,在eCognition中重新建立軟件能夠讀取的分類規則,進行建筑物區域的粗提取。
1.3 建筑物的自動化提取與形狀標繪
1.3.1 建筑物MBR計算
在Matlab平臺,首先使用Candy算子對粗提取建筑物區域進行輪廓提取。然后將建筑物輪廓信息轉化成輪廓點集,通過輪廓點集運算,計算建筑物的MBR,詳細的計算步驟如下:
(1) 輸入輪廓點集Ei(xi,yi),并計算輪廓的形心Center(p,q),形心的x坐標為
形心的y坐標為
Center(p,q)、Ei(xi,yi)連線與x軸的夾角為a1。
(2) 找出Ei(xi,yi)中xi和yi的最小和最大值minx,miny,maxx,maxy,以(minx,miny),(maxx,maxy),(minx,maxy),(maxx,miny)作為外接矩形的4個頂點確定一個矩形。計算矩形面積A1,將A1賦給min(Area),頂點坐標賦給
Rect=(minx,miny,maxx,maxy)

(4)
(4) 調用步驟(2),計算旋轉β后的外接矩形的面積Ai,判斷(Ai)≤min(Area)是否成立;若成立,則min(Area)=Ai,同時將獲得的矩形4個頂點坐標順時針旋轉β,更新
Rect=(minx′,miny′,maxx′,maxy′)
(5) 重復步驟(4),直至程序結束,最后的矩形頂點坐標集即構成最小外包矩形。
1.3.2 輪廓分段擬合與優化
提取建筑物的粗輪廓往往呈不規則的波浪形邊界,然而實際中建筑物邊界為規則直線。將不規則的輪廓轉成規則直線最基本常用的方法為直線擬合。設一組坐標點Ni(xi,yi)∈E(i=1,2,…,M)之間的線性關系為:y=ax+b,通過最小二乘估計參數
(5)
建筑物邊界線由多個直線段組成,因此需要對建筑物粗輪廓進行分段。分段的方法為將輪廓坐標投影到該輪廓的主方向或副主方向上。
傳統直線擬合結果在確定建筑物角點時會出現很大偏差,擬合出的直線破壞了邊界線之間的正交關系和平行關系。為了解決此偏差,需要對最小二乘擬合的結果進行優化。本文在MBR約束條件下調整擬合直線斜率,使直線與主方向平行或正交,然后根據最小二乘法求得直線方程截距。設優化后的直線方程為
y=a′x+b′
(6)
式中,α′=tanθ;b′=(∑yi-α′∑xi)/M。
1.3.3 交點方向決策器
擬合直線的交點并非全部位于建筑輪廓上,故先要設定一個半徑為R的圓,判斷圓域內是否有輪廓片段數據。如果沒有,則不做決策,進入下一個交點;如果有輪廓片段,則根據圓形區域內輪廓片段的特征給該點的方向做出決策。最后將這些點按照順序連接,即可成功標繪出建筑物。為此,本文設計了交點方向決策器。
交點方向決策器是一個以交點為圓心,半徑為R的圓形區域,具有決策該點方向的功能。為了讓決策器做出準確判斷,首先定義出交點的方向關系。以建筑物主方向和副主方向為坐標軸,交點坐標Pt為坐標原點,建立局部坐標系如圖3所示,新建立的坐標系把平面分成了4個區域,位于局部坐標原點上方的區域定義為第一區,位于局部坐標原點左邊的區域為第二區,位于局部坐標原點下方的為第三區,位于局部坐標原點右方的區域為第四區。
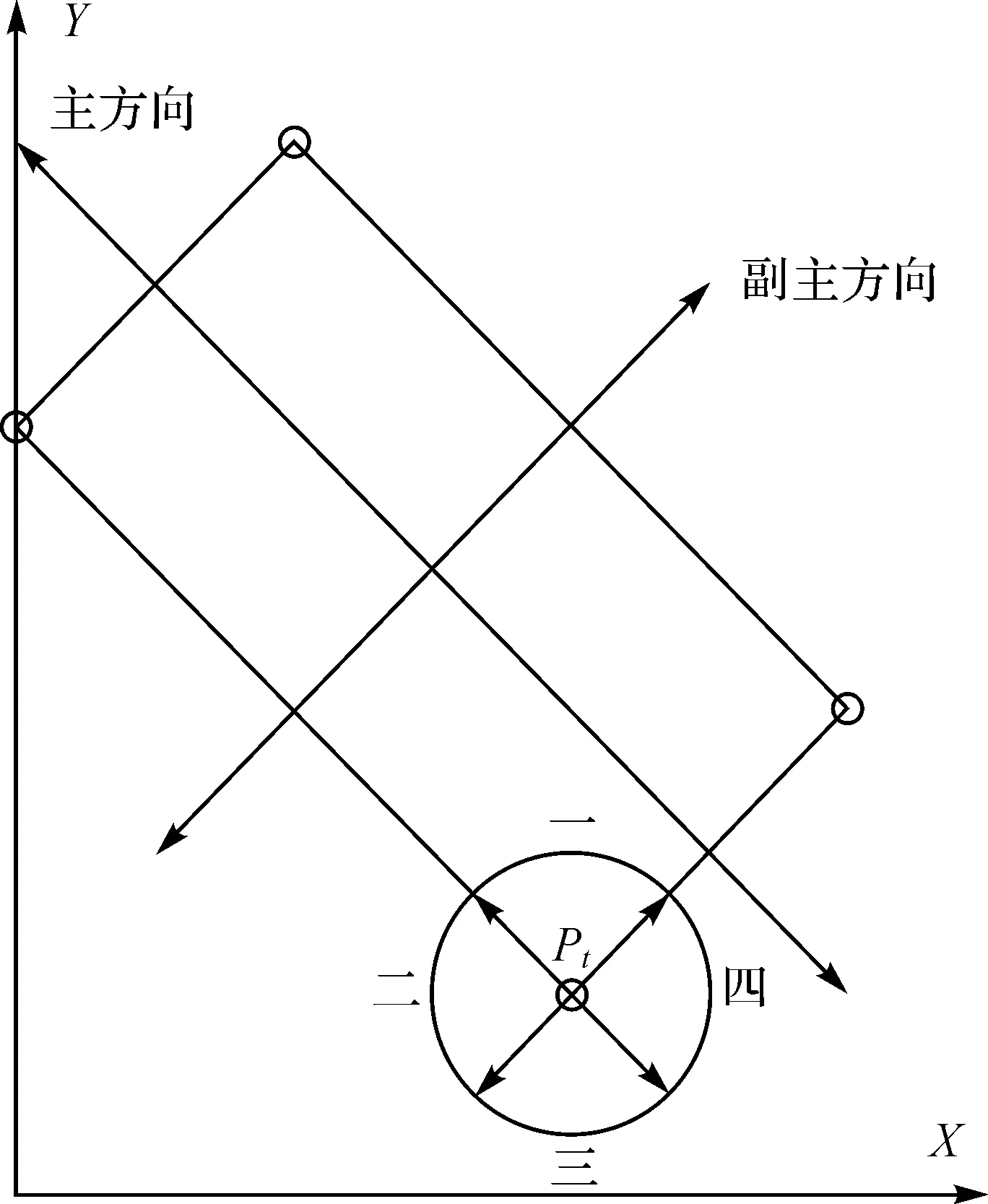
圖3 局部坐標系
根據交點處輪廓的特征可以得出6種方向關系,如圖4所示,因此一個決策器可以根據輪廓片段特征做出6種方向關系的決策。圖4(a)表示第一區走向,(b)表示第四區走向,(c)表示第三區走向,(d)表示第二區走向,(e)表示主方向走向,(f)表示副主方向走向。
2 試驗與結果分析
為了驗證提出的基于MBR約束的光學影像直角建筑物標繪方法的有效性,本文進行了相關試驗。試驗1為從影像中截取了單一建筑物進行提取和標繪;試驗2為對某一區域所有建筑物進行標繪;最后計算標繪后得到的建筑物的周長和面積,進行精度評價。
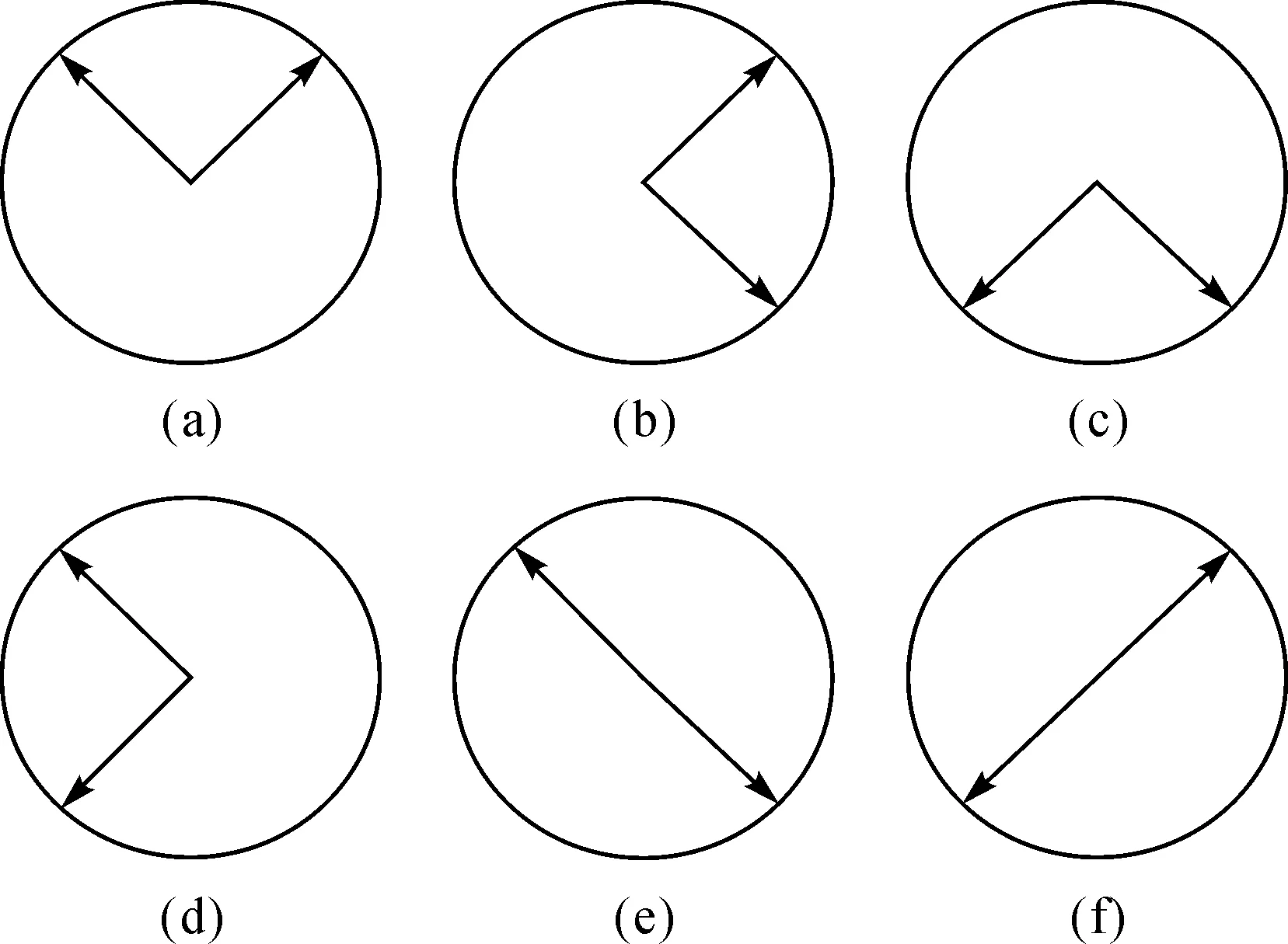
圖4 決策器方向模式
2.1 試驗1
本文所用研究數據為廣西某地高分遙感影像截取的單一建筑物,影像大小為219×219像素,試驗環境為Matlab2013a 語言編程環境,使用計算機處理器為Intel(R) Xeon(R)CPU E5645,處理速度為2.40 GHz,內存為4 GB。利用Matlab2013a編程平臺計算該建筑物的MBR,如圖5所示。
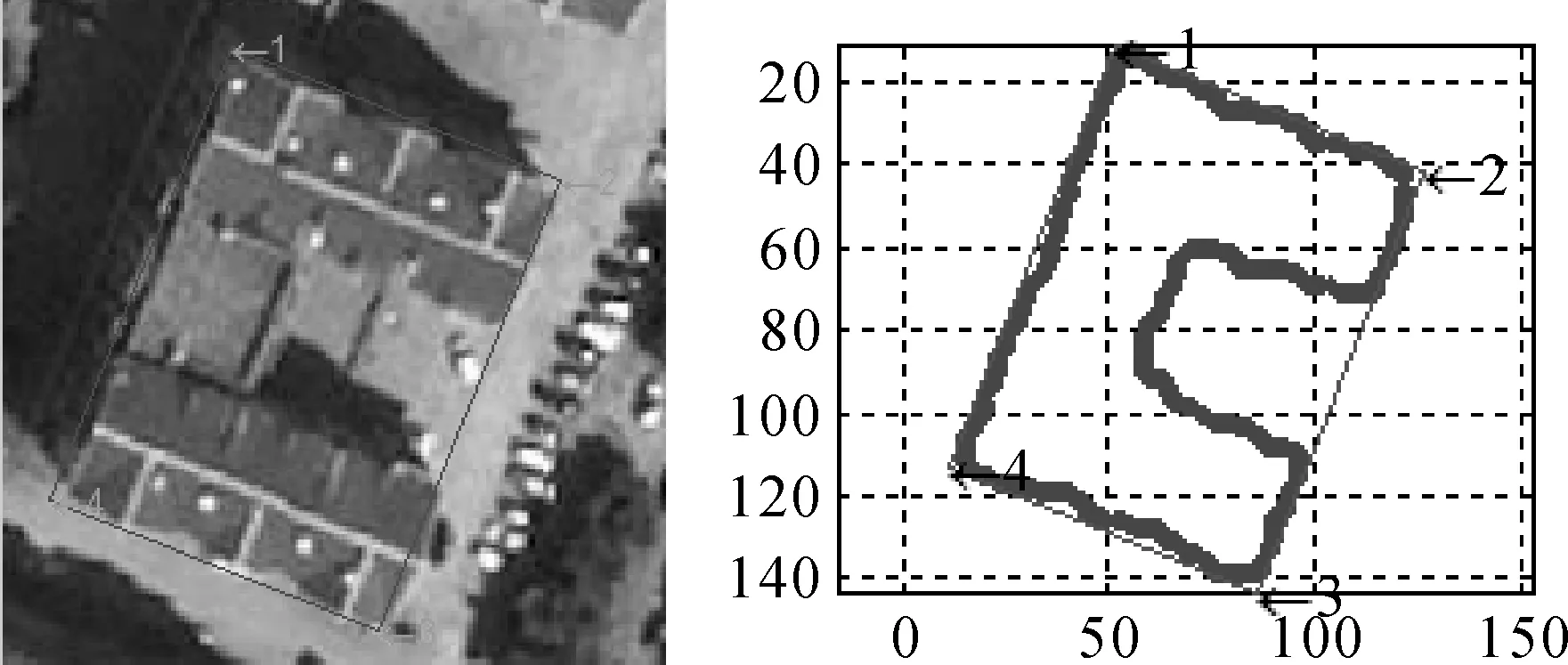
圖5 原始影像及其最小MBR計算
該MBR由直線L12、L23、L34、L41組成,根據點到直線的距離公式,計算輪廓上的坐標點Ei(xi,yi)到直線L12、L23的距離,如圖6所示。
由圖6可知,曲線的走勢具有一定的穩定性,即可以利用距離將輪廓分段。本文根據聚類波峰波谷點實現輪廓分段。當某個點的二次差分值大于0,則該點表示波峰;當某個點的二次微分值小于0,則該點表示波谷。波峰波谷聚集情況如圖7所示。
由圖7(b)可知,波峰波谷聚集在4處,而且每一處的波峰波谷分布在同一個距離層次上,說明這4處的波峰波谷代表了4條平行于L12的直線;另外,共有波峰波谷聚集在4處,其中有2處分布在同一個距離層次上,說明這2處的輪廓出自同一條直線,因此表明組成建筑物的邊界中有3條邊平行于L23。
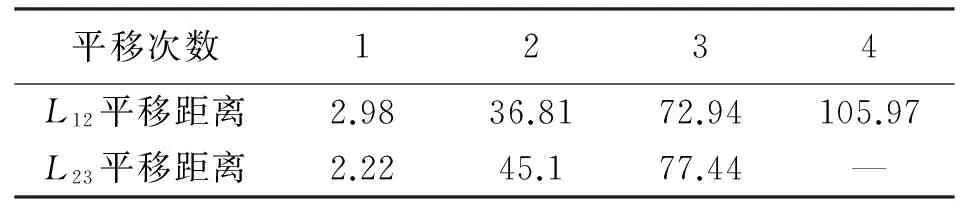
根據波峰波谷聚集的情況,以及在距離層次上的分布,計算出L12和L23平移的距離情況。最終的平移距離以每一個段中距離的平均值來表示,見表1。
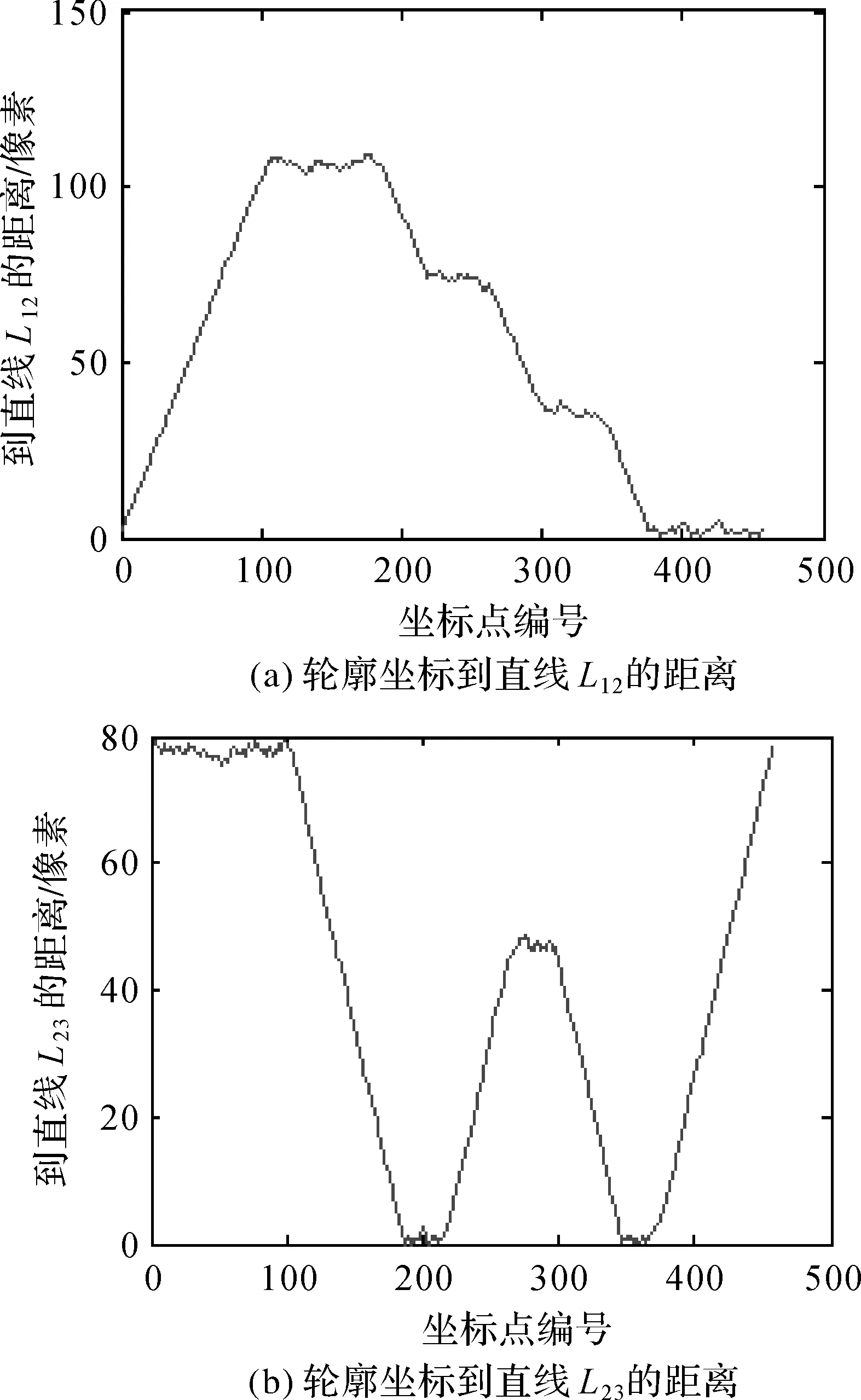
圖6 輪廓坐標到MBR一對直角邊的距離
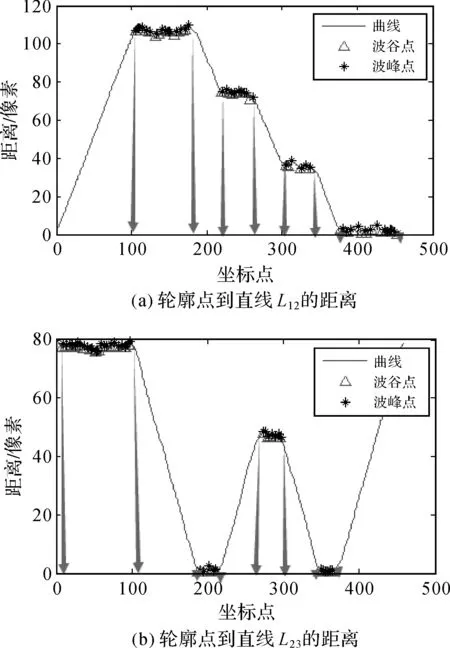
圖7 根據波峰波谷的輪廓分段
上一個過程中共獲得7條直線,分別代表著建筑物的7條邊。而直線的交點則表示建筑物的角點或建筑物邊上的點。7條直線彼此正交,產生了12個交點,交點的分布情況如圖8所示。
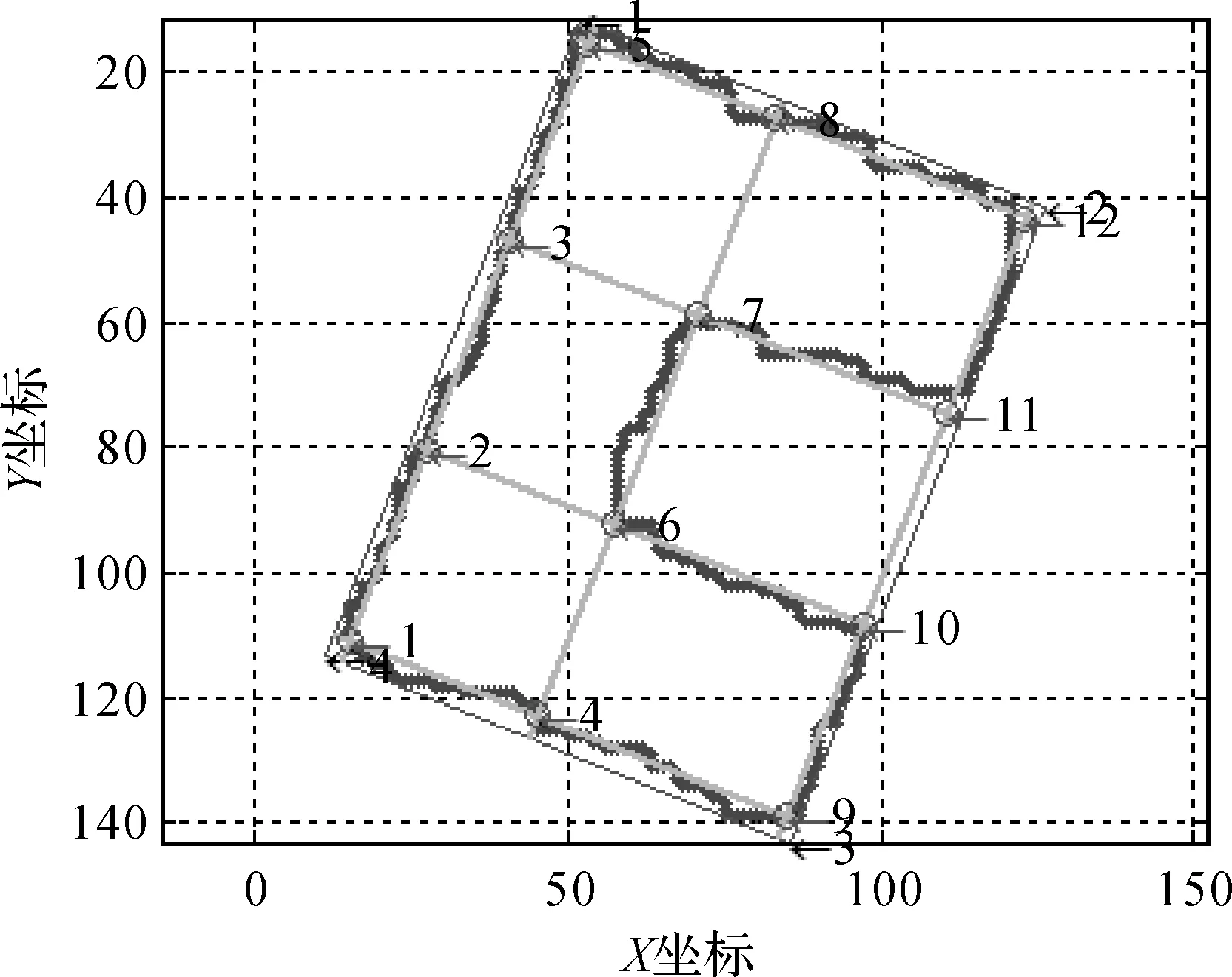
圖8 MBR擬合直線的交點
計算輪廓片段的曲率圓心平均坐標,交點坐標曲率圓的結果如圖9所示。
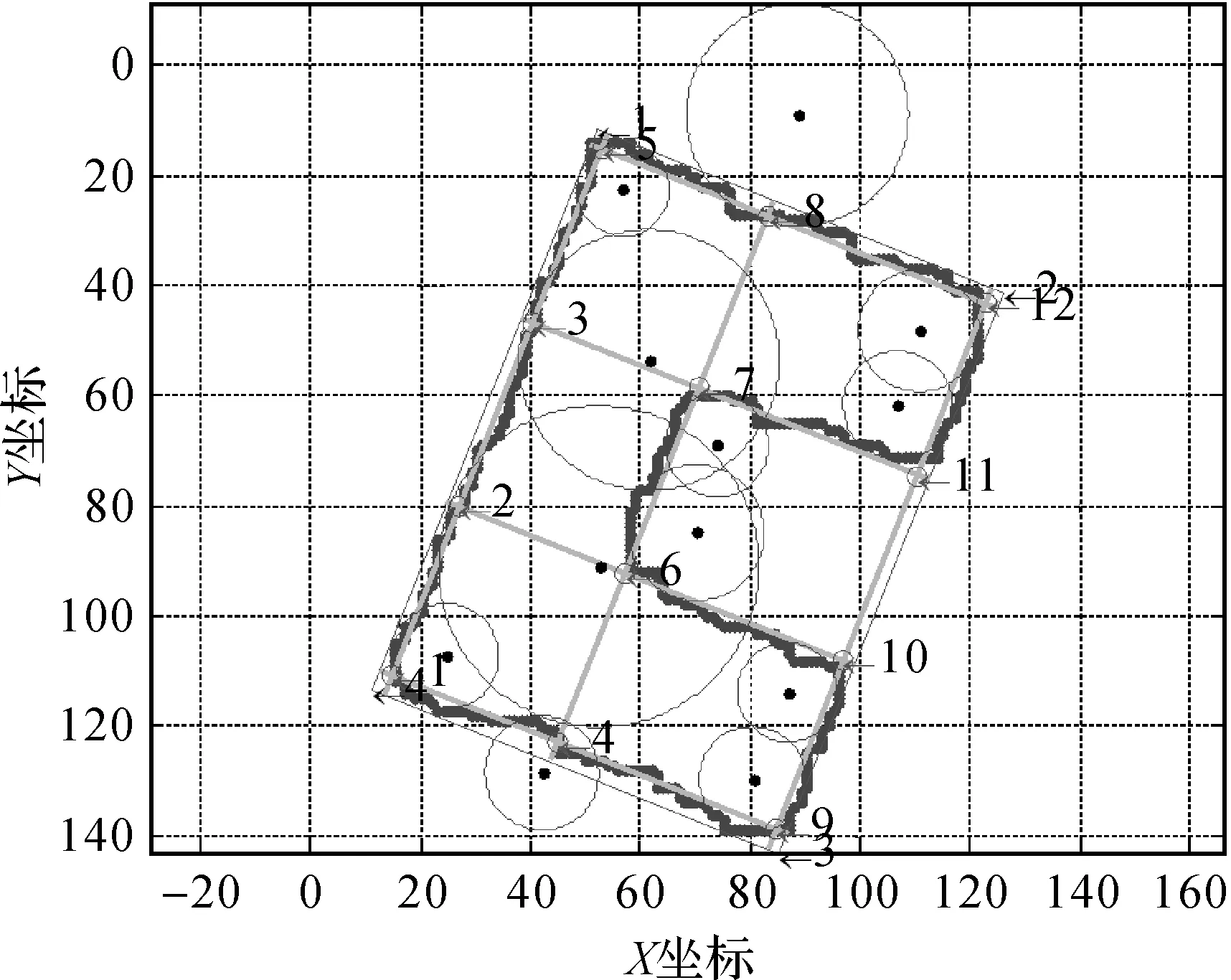
圖9 輪廓片段曲率圓
從圖9可以看到,非建筑物角點的交點,其區域內輪廓片段的平均曲率圓的圓心位于該交點局部坐標系的一對主方向軸上或在很小范圍內波動。若位于副主方向軸上(或附近),則其行走方向為主方向走向;若位于主方向軸線上(或附近)則其行走方向為副主方向;若圓心落于該點相應的象限內則該點的行走方向為該象限的行走方向。根據各交點對應的平均曲率圓的圓心位置確定各交點的行走方向,如圖10所示。
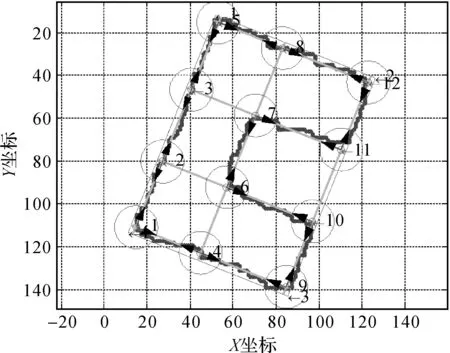
圖10 交點行走方向確定
根據各角點的行走方向,把這些點依次連接起來形成一個封閉的正交多邊形,這就是基于MBR標繪方法的建筑物標繪結果,如圖11所示。

圖11 基于MBR標繪結果
將標繪結果與人工標繪結果作對比,以人工獲取的形狀作為真實值,求出基于MBR標繪的結果精度(見表2)。將標繪結果的面積與周長作為評價指標,面積的相對誤差為3.5%,周長的相對誤差為4.6%。
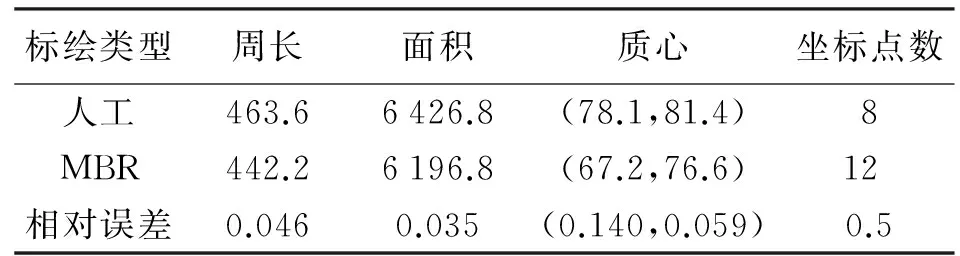
表2 基于最小MBR標繪的誤差
2.2 試驗2
試驗2中選取一幅包含多個直角建筑的高分遙感影像,采用本文的技術方法進行建筑物標繪,并將標繪的結果與人工標繪結果作對比,如圖12、圖13 所示。
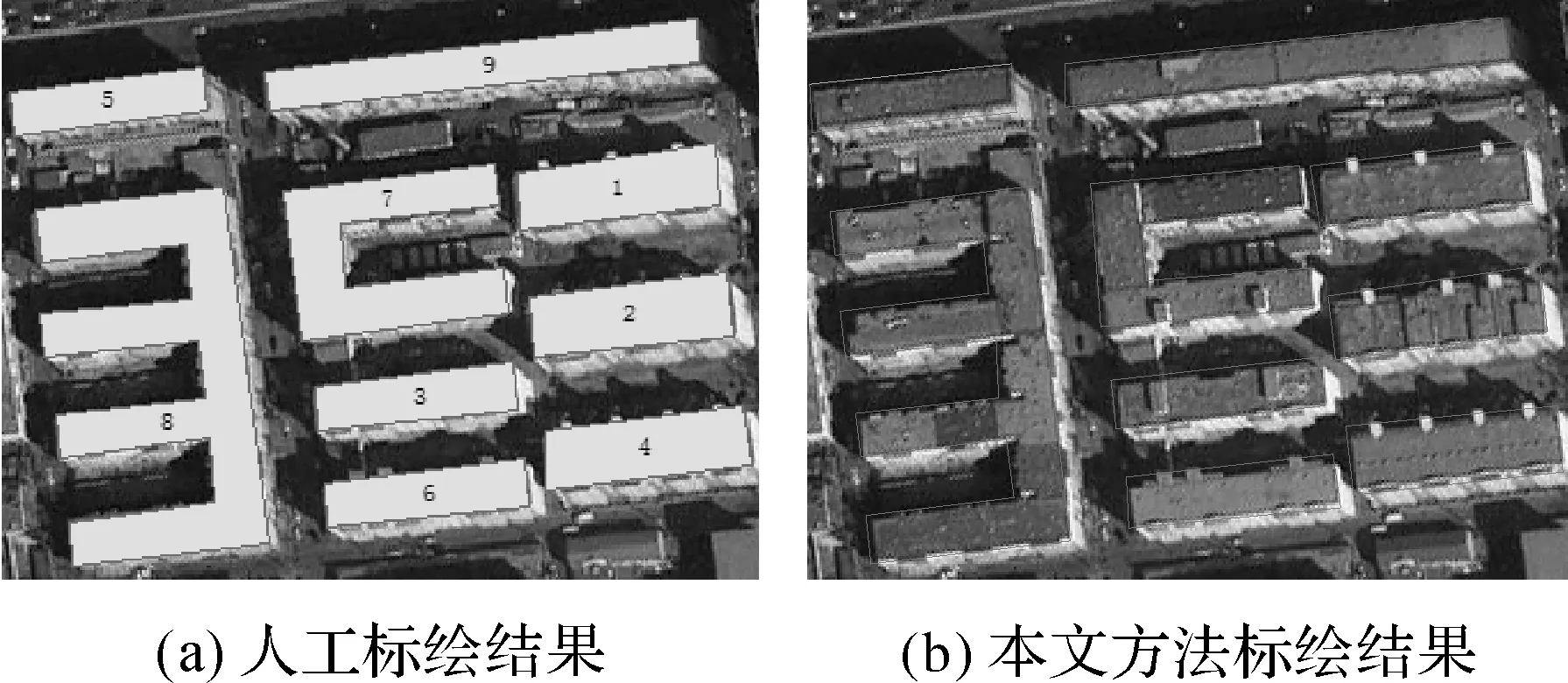
圖12 直角建筑物自動標繪結果
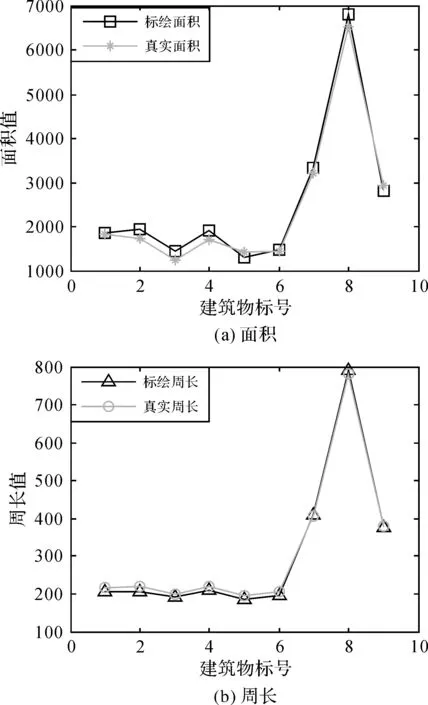
圖13 本文方法標繪結果與人工標繪真實結果對比
從圖13可以看出,選取的9個建筑物整體的標繪結果與實際值相差不多,其中面積自動標繪誤差比周長的自動標繪誤差稍大。然而面積自動標繪誤差比周長的自動標繪誤差稍大,引起這個現象的主要原因是因為原始高分辨率影像中一些非建筑物細節干擾信息很容易被誤提取,從而引起粗輪廓提取精度降低。而周長的精度相對較高的原因是本文采取了MBR約束條件,保證了標繪過程中直線邊界的幾何特征與實際建筑物特征相符。最后統計全部9個建筑物自動標繪的面積和周長的平均誤差,得出面積的平均精度為93.3%,周長的平均精度為96.1%。
3 結 語
本文基于建筑物的直角特征提出了一種高分辨率遙感影像中直角建筑物提取、標繪的新方法。主要針對直角建筑物進行標繪,并將MBR標繪方法用于實際建筑物提取與標繪中。本方法的流程中,CART分類樹與多尺度分割結果包含誤差,通過對建筑物輪廓分段擬合優化,可以有效去除粗提取建筑物結果中的邊緣“毛刺”,并由建筑物輪廓線特征提取出建筑物角點,利用角點決策器確定各個角點的行走方向,通過對建筑物角點的精細化提取,成功標繪出建筑物信息,提高了高分遙感影像中建筑物提取的精度。
試驗結果表明,本文所述標繪方法僅采用高分光學數據而無需激光雷達數據,研究的方法復雜程度低,建筑物提取速度快,易于實現。建筑物提取過程中影像質量、干擾地類等影響因素較多,目前光學影像中建筑物提取模型存在擾動性,邊緣易產生錯分和漏分現象,通過幾何約束條件可以有效減少提取誤差。因此,如何通過幾何約束更加快速有效地提取并標繪出不同形狀的建筑物,提高算法的穩健性為后續工作的研究方向。
參考文獻:
[1] 張正,王宏琦,寧忠磊,等.高分辨率遙感圖像中城區建筑物自動測繪方法研究[J].國外電子測量技術,2010,29(6):49-53.
[2] 孫金彥,黃祚繼,周紹光,等.高分辨率遙感影像中建筑物輪廓信息矢量化[J].遙感學報,2017,21(3):396-405.
[3] BIOUCASDIAS J M,PLAZA A,CAMPSVALLS G,et al.Hyperspectral Remote Sensing Data Analysis and Future Challenges[J].IEEE Geoscience and Remote Sensing Magazine,2013,1(2): 6-36.
[4] 張祖勛,張劍清,胡翔云.基于物方空間幾何約束最小二乘匹配的建筑物半自動提取方法[J].武漢大學學報(信息科學版),2001,26(4):290-295.
[5] CUI S,YAN Q,REINARTZ P,et al.Complex Building Description and Extraction Based on Hough Transforma-tion and Cycle Detection[J].Remote Sensing Letters,2011,3(2): 151-159.
[6] TURKER M,KOC-SAN D.Building Extraction from High-resolution Optical Spaceborne Images Using the Integration of Support Vector Machine (SVM) Classific-ation,Hough Transformation and Perceptual Grouping[J].Applied Earth Observation and Geoinformation,2015,34(2):58-69.
[7] WANG J,YANG X,QIN X,et al.An Efficient Approach for Automatic Rectangular Building Extraction from Very High Resolution Optical Satellite Imagery[J].IEEE Geoscience and Remote Sensing Letters,2015,12(3): 487-491.
[8] FAZAN A J,DAL A P.Rectilinear Building Roof Contour Extraction Based on Snakes and Dynamic Programming[J].International Journal of Applied Earth Observation and Geoinformation,2013,25(8):1-10.
[9] CHENG B,LIU Q,LI X,et al.Local Perception-based Intelligent Building Outline Aggregation Approach with Back Propagation Neural Network[J].Neural Processing Letters,2015,41(2): 273-292.
[10] CHAUDHURI D,KUSHWAHA N K,SAMAL A,et al.Automatic Building Detection from High-resolution Satellite Images Based on Morphology and Internal Gray Variance[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2016,9(5): 1767-1779.
[11] 程亮,龔健雅.LiDAR輔助下利用超高分辨率影像提取建筑物輪廓方法[J].測繪學報,2008,37(3):391-393,399.
[12] 呂鳳華,舒寧,龔龑,等.利用多特征進行航空影像建筑物提取[J].武漢大學學報(信息科學版),2017,42(5):656-660.
[13] 吳秀蕓,李艷,周華.基于角點檢測的建筑物輪廓矢量化方法[J].遙感信息,2011,17(5):95-99.
[14] HUANG X,ZHANG L.Morphological Building/Shadow Index for Building Extraction from High-resolution Imagery over Urban Areas[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2012,5(1): 161-172.
[15] QI Min,JIA Jiankui.Automatic Extraction of the Building Rectilinear Rooftops Based on Region over Growing[J].Journal of Computers,2014,9(10):2365-2370.
[16] 程效軍,程小龍,胡敏捷,等.融合航空影像和LIDAR點云的建筑物探測及輪廓提取[J].中國激光,2016,43(5):253-261.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
