水下滑翔機技術發展現狀與展望
2018-05-10 08:11:33沈新蕊王延輝楊紹瓊李昊璋
水下無人系統學報 2018年2期
沈新蕊, 王延輝, 楊紹瓊, 梁 巖,李昊璋
?
【編者按】水下滑翔機作為一種新型的無人水下航行器, 具有能耗小、續航力強、制造成本和維護費用低、可大量投放和重復使用等特點, 滿足了長時續、大范圍海洋探索的需要。2004年以來, 以混合推進技術為特征的新一代水下滑翔機成為國際研究新趨勢, 較好地補充了傳統水下滑翔機航速低和抗流能力較弱的問題, 具有良好的機動性、可靠性及隱身性。天津大學水下機器人團隊作為國內率先參與設計研發混合推進水下滑翔機的機構之一, 其研制的“海燕-II”水下滑翔機采用最新混合推進技術, 設計最大工作深度1 500 m, 設計最大航程1 500 km, 可持續不間斷工作30天以上, 具備獨立在水下全天候工作的能力, 實現了水下滑翔機整體水動力優化設計、大深度滑翔、新型驅動融合設計和多任務觀測模塊集成研究等關鍵技術的自主創新, 有力推進了我國水下滑翔機的實用化進程。2018年4月, 青島海洋科學與技術國家實驗室海洋觀測與探測聯合實驗室(天津大學部分)的“海燕-10000”深海滑翔機在馬里亞納海溝首次下潛至8 213 m, 刷新了深海滑翔機工作深度的世界紀錄。我刊有幸邀請到該團隊骨干成員精心撰文, 詳細介紹了國內外水下滑翔機技術的發展現狀, 并對該領域技術的發展趨勢進行了展望, 希望此篇全景式的綜述文章能為關注該領域的廣大讀者提供全面細致的信息解讀, 旨在拓寬相關科研工作者的研究思路, 促進國內水下滑翔機技術的發展。
水下滑翔機技術發展現狀與展望
沈新蕊1,2, 王延輝1,2, 楊紹瓊1,2, 梁 巖1,2,李昊璋1,2
(1. 天津大學 機械工程學院, 天津, 300350; 2. 青島海洋科學與技術國家實驗室 海洋觀測與探測聯合實驗室, 山東 青島, 266237)
水下滑翔機依靠調節浮力實現升沉, 借助水動力實現水中滑翔, 是一種特殊的無人水下航行器, 可對復雜海洋環境進行長時續、大范圍的觀測與探測, 在全球海洋觀測與探測系統中發揮著重要作用。文中綜述了國內外水下滑翔機技術的發展現狀, 重點介紹了水下滑翔機單機平臺及其核心技術的研究進展, 并對支撐水下滑翔機動力學與控制領域的研究進行了歸納。此外, 依據國內外具有代表性的成果, 對水下滑翔機協作組網觀測技術進行了概述, 并詳細介紹了水下滑翔機小型低耗傳感器設計與集成技術的發展應用, 闡述了水下滑翔機數據格式與協議領域的發展現狀。最后, 從水下滑翔機功耗優化, 通信及智能化水平的提升等領域, 對水下滑翔機技術未來的發展趨勢進行了展望。
水下滑翔機; 組網觀測技術; 傳感器設計; 數據格式與協議; 智能感知
0 引言
作為一種新型水下無人航行器, 水下滑翔機(underwater glider, UG)具有成本低、續航長及可重復利用等優點, 并兼具一定的航跡控制能力, 已成為海洋環境觀測與探測平臺的重要組成部分。此外, 它還具備短時延信息傳輸和大范圍運行的能力, 是海洋四維空間強有力的觀測和探索工具之一[1]。UG還可用于探測和追蹤典型或突發海洋事件, 適用于“中尺度”和“亞中尺度”海洋動力過程的觀測, 可為海洋學領域的研究提供高分辨率的空間和時間觀測數據。
UG在新興的全球海洋觀測系統中發揮著重要作用。作為一種有效的新興海洋探索平臺, UG可在深遠海和大陸架等獨特海洋環境中進行重復調查, 其操作靈活, 具備多機協作觀測等特性, 在這類精細化密集型海洋環境觀測中具有廣闊的應用前景。
當前, 國外UG技術的發展與應用主要集中于美國、法國、英國和澳大利亞等海洋強國, 其中美國一直是先驅者和領導者。自1989年美國海洋學家Stommel[2]提出UG的發展和應用規劃后, UG技術進入高速發展期。20世紀90年代, 美國相繼開發成功Slocum[3]、Seaglider[4]和Spray[5]3種典型UG, 并持續進行UG技術攻關和應用探索。除美國外, 歐洲和澳大利亞從21世紀開始專注于UG的應用和協作技術的研究, 并組建了各自的UG觀測網絡, 顯示了其在UG應用方面的技術水平。
我國UG技術的研究始于本世紀初, 雖然起步較晚, 但在UG單機相關技術方面發展迅速。天津大學2002年開始第一代UG的研制, 于2005年研制完成溫差能驅動UG原理樣機, 并成功進行水域試驗。同年, 中國科學院沈陽自動化研究所開發出了UG原理樣機, 并完成湖上試驗[6-7]。天津大學于2007年研制出“海燕”混合推進UG試驗樣機, 并在撫仙湖成功完成水域試驗。此外, 國家海洋技術中心[8]、中國海洋大學[9]、中國船舶重工集團公司第710研究所[10]、第702研究所[11]、華中科技大學[12]、上海交通大學[13]、浙江大學[14]、西北工業大學[15]、大連海事大學[16]等也對UG技術進行了相關研究。2015年4~6月, 天津大學水下機器人團隊投入多臺“海燕”UG在多家UG性能綜合測試中, 創造了我國UG當時的工作深度、連續航程、航時及剖面數等多項紀錄。2017年3月, 中國科學院沈陽自動化研究所的“海翼-7000”深海滑翔機在馬里亞納海溝完成了6 329 m大深度下潛觀測任務, 打破了當時UG工作深度的國際紀錄。2018年4月, 青島海洋科學與技術國家實驗室海洋觀測與探測聯合實驗室(天津大學部分)的“海燕-10000”深海UG在馬里亞納海溝首次下潛至8213 m, 刷新了深海UG工作深度的世界紀錄。
1 UG本體平臺
1.1 常規UG
最早的UG是由Teledyne Webb Research (TWR)公司于1991年研制成功的Slocum[17]。該UG經多年不斷完善, 已成為當前應用最為廣泛的UG產品之一。1999年美國Scripps和Woods Hole海洋研究所共同研制成功Spray, 其工作深度可達1500 m[18]。同年, 美國華盛頓大學研制成功Seaglider, 其采用新型技術的耐壓殼體減小浮力改變量, 可有效節省能源[19]。目前, Slocum、Spray和Seaglider是國際上的主流UG產品[20]。近年來, 美國Exocetus公司還研發了用于淺海觀測任務的ANT Littoral Glider和Exocetus Coastal Glider, 與其他UG相比, 其運行速度性能優勢明顯[21]。國際上, 當前典型常規UG如圖1所示, 其相應主要技術指標見表1。
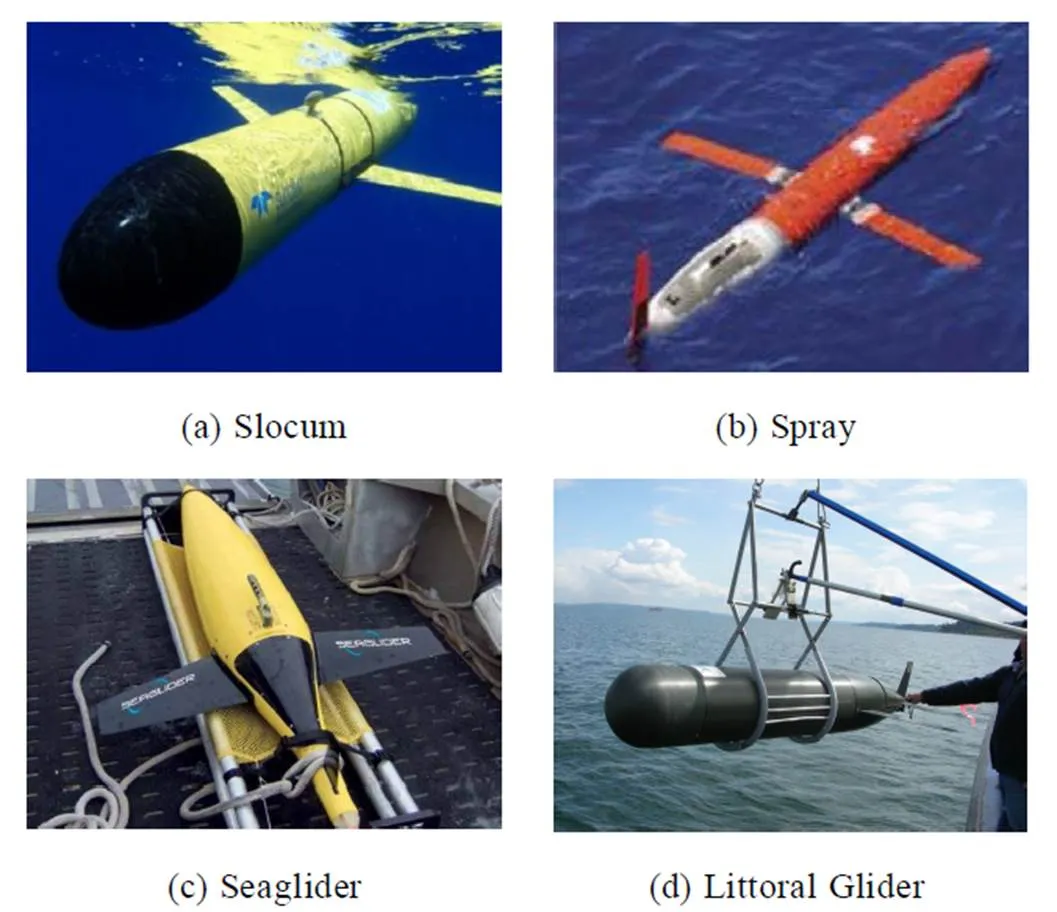
圖1 常規水下滑翔機
1.2 多模式混合推進UG
針對UG運動速度慢、抗流能力相對較弱的問題, Bachmayer等[22]首次提出了“Hybrid Glider”的概念。經過近20年發展, 混合推進水下滑翔機(hybrid-driven underwater gliders, HUG)平臺技術逐漸成熟。國外已達到實用水平和商品化的HUG, 包括法國研發的Sea Explorer[23]、Sterne[24]和北約研制的Folaga[25]。它們均在UG的尾部加裝螺旋槳推進器, 實現多模式混合推進。
我國在HUG研發方面與國際基本同步, 也取得了關鍵性技術突破。天津大學經多年研發, 完成了HUG “海燕-II”(Petrel-II)的研制, 在工作深度、航行速度方面具有一定優勢[26-27]。同時, 中國科學院沈陽自動化研究所也開展了HUG的單元技術攻關, 部分關鍵技術獲得突破。當前國內外典型HUG如圖2所示, 相應主要技術指標見表2。
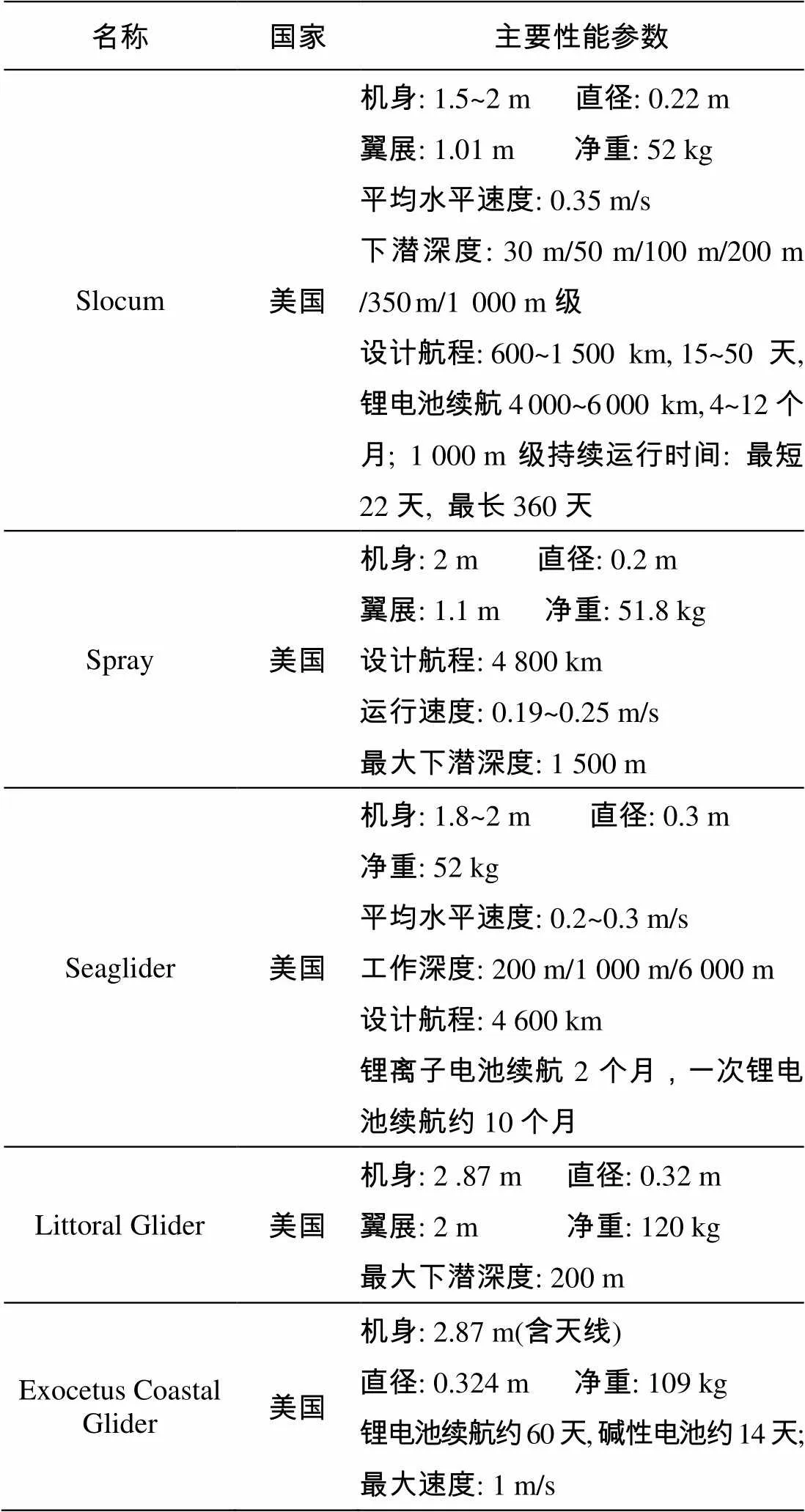
表1 典型常規水下滑翔機主要技術指標
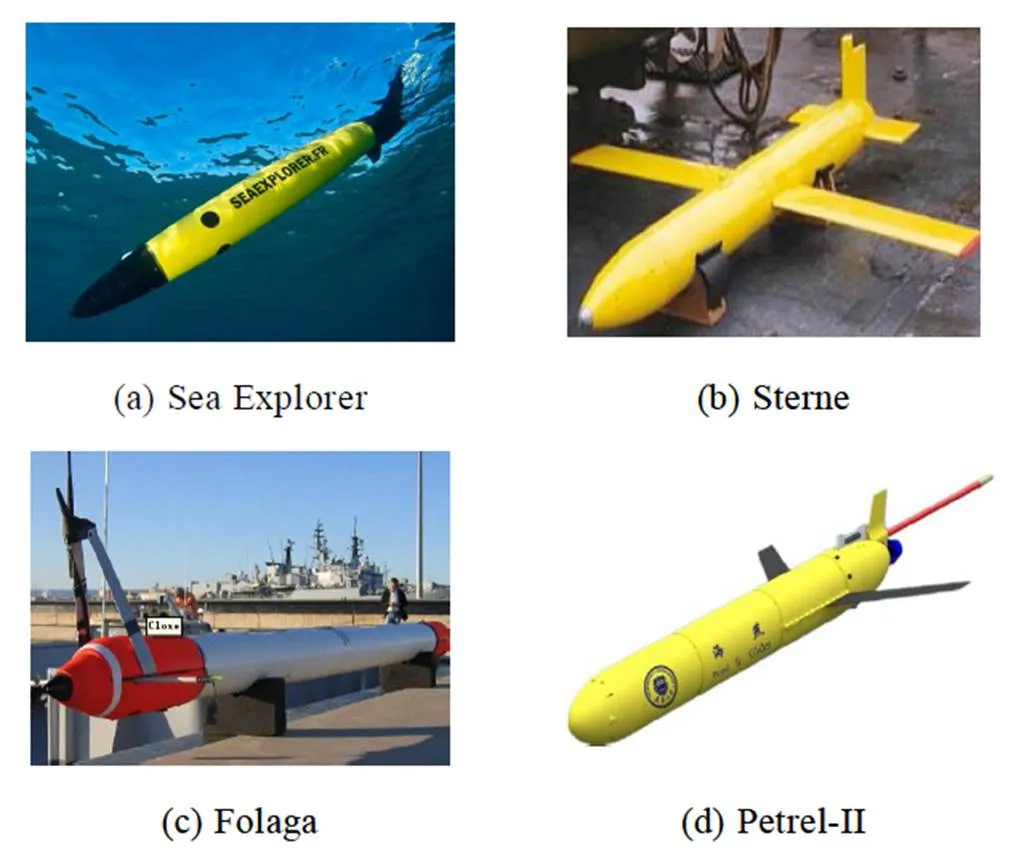
圖2 典型的混合推進水下滑翔機
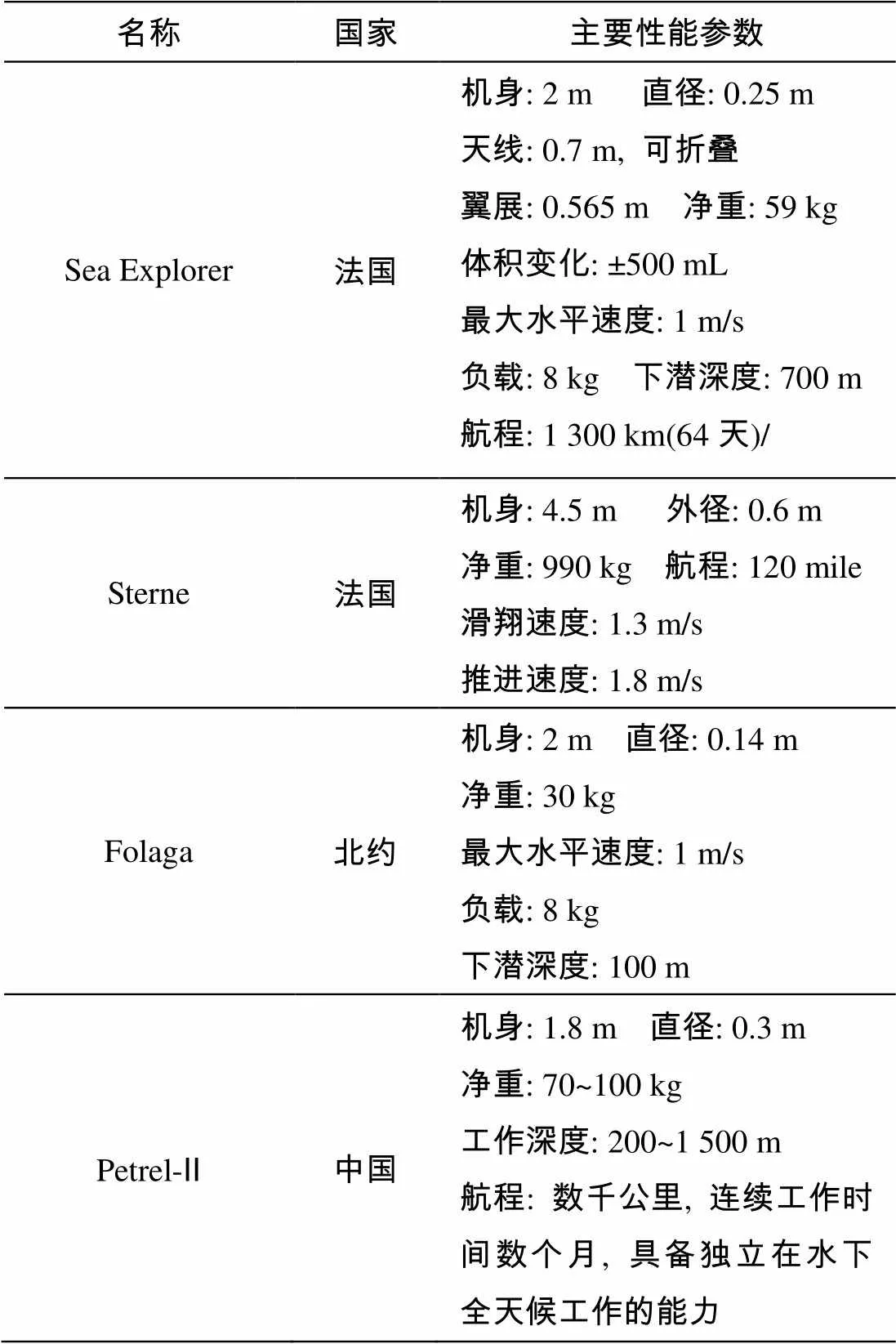
表2 HUG主要技術指標
1.3 深海UG
美國華盛頓大學為突破UG深度極限, 通過采用碳纖維復合材料耐壓殼體, 研制出了用于監測深海環境的大深度UG——Deep Glider, 其設計工作深度6 000 m, 可搭載溫度、鹽度和溶解氧等多種任務傳感器[28], 并實現了工作深度近6 000 m的實際應用。
國內, 中國科學院沈陽自動化研究所于2017年研制成功7 000 m級“海翼”深海UG, 并在馬里亞納海溝完成了6329 m大深度下潛試驗[29]。青島海洋科學與技術國家實驗室自2016年實施“問海計劃”項目, 支持天津大學和中國船舶重工集團公司第710研究所等多家單位進行4 000 m級深海UG關鍵技術攻關, 已研發完成的深海UG 4 000 m級樣機于2018年4月成功開展系列化的海上試驗驗證。同期, 天津大學的“海燕-10000”首次下潛至8213m, 刷新了此前也是由我國深海UG保持的世界紀錄。當前國內外部分深海UG如圖3所示, 相應主要技術指標在表3中列出。
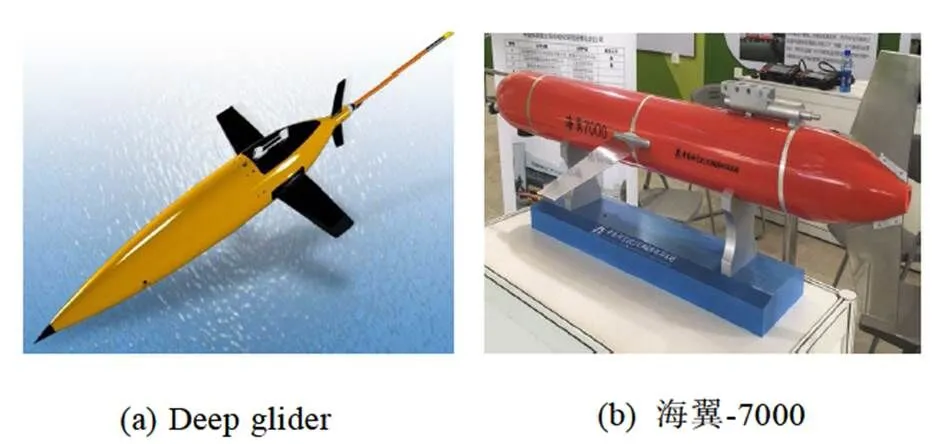
圖3 深海UG
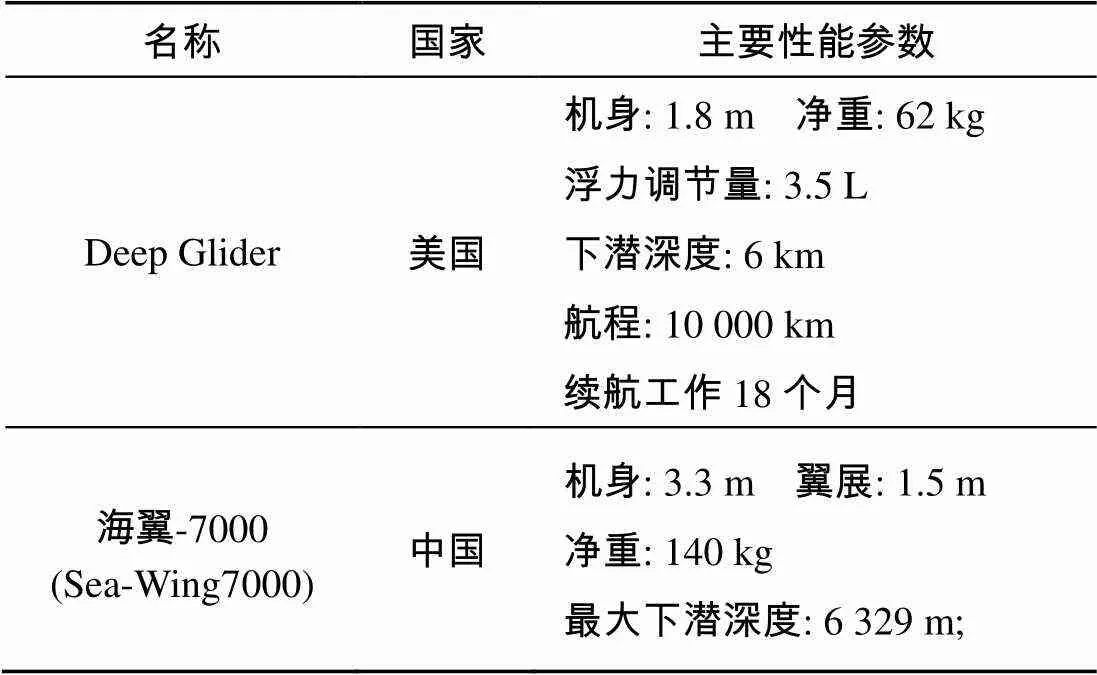
表3 深海UG主要技術指標
1.4 飛翼UG
美國Scripps海洋學研究所和華盛頓大學聯合在2003年開發了Liberdade級翼身融合大型UG[30]。該類UG分為聲學滑翔機X-Ray和Z-Ray, 是世界上已知體積和質量最大的UG[31]。
1) X-Ray
X-Ray是一種基于“飛翼”設計的UG, 其整體結構如圖4所示。X-Ray翼身融合, 設計獨特, 可實現翼展水平距離最大化和功率消耗最小化, 最大限度地提高其探測和定位能力, 并在蒙特利灣開展了相關的海試應用[32]。
2) Z-Ray
Z-Ray是X-Ray的改進型, 搭載有聲學傳感器, 其主要功能是跟蹤和自動識別海洋哺乳動物[33]。Z-Ray升阻比為35: 1, 具有良好的姿態控制和航行能力, 目前已應用于圣地亞哥海底被動聲學自主監測海洋哺乳動物計劃(passive acoustic autonomous monitoring of marine mammals program), 如圖5所示。
美國X-Ray和Z-Ray兩型號翼身融合設計的UG, 與傳統UG相比融合了展弦比大的機翼, 可提供更高的升阻比, 并提升能源利用效率, 但降低了內部空間利用率。因此, 在提高UG水動力性能的基礎上, 盡可能地增加內部空間, 是翼身融合UG的設計難點和需要突破的技術方向。
在國內, 孫春亞等[34]針對翼身融合UG的設計難點, 以最大航程為目標對UG外形設計進行優化, 提高了UG的升阻比并增大了機體體積, 兼顧了高水動力性能和大能源攜帶量兩方面的需求; 何衍儒等[35]使用非支配排序多目標遺傳算法對翼身融合UG機身結構進行了質量和外形的多目標設計優化, 其結果對翼身融合UG機身結構優化設計具有一定工程參考價值。
1.5 溫差能UG
溫差能驅動UG是指利用水域表層與深層的溫度差實現動力驅動功能。美國TWR公司是國外唯一開展溫差能UG的研究機構, 已完成了4代樣機的研制[36]。其于1988年研制出世界首臺溫差能驅動UG原理樣機, 通過水域試驗驗證了溫差能UG方案的可行性[3]; 于2005年研制成功了具備連續俘獲海洋溫差能, 執行遠航任務能力的第2代Slocum Thermal WT01[37]; 2008年, 第3代Slocum Thermal研制成功, 其溫差能換熱器性能有了較大提升, 換熱器基本定型[38]; 并于2013年研制成功了第4代Slocum Thermal E-Twin溫差能驅動UG, 其具有將溫差能轉化為電能的功能, 可為主控等耗電系統供電, 且不受自身攜帶電池能量的限制[39](見圖6)。
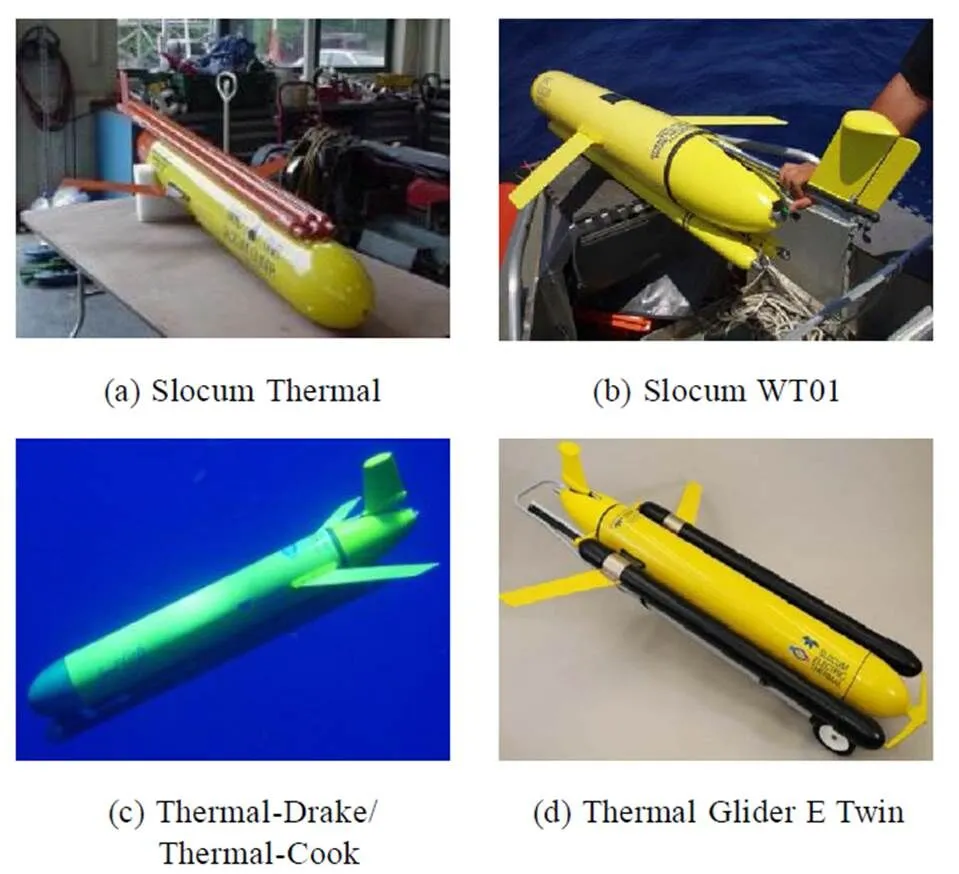
圖6 4代Slocum溫差能水下滑翔機
國內, 天津大學自2002年開始進行溫差能驅動UG的關鍵技術攻關。2005年7月, 其溫差能UG在千島湖進行水域試驗, 完成了25個剖面運動后回收[40-41]。2006年, 王樹新等[6]對此溫差能UG進行了動力學分析, 為溫差能UG技術的進一步發展提供了理論支撐。目前, 天津大學已開發出溫差能UG的工程樣機, 并在2015年實現了連續700余公里, 200余剖面的海上應用。
溫差能UG利用相變材料(phase change material, PCM)的熱脹冷縮獲取海洋熱能, 并將其轉化為機械能或電能, 以實現浮力驅動。其中相變材料對周圍海水溫度變化敏感, 可通過增加位移和降低UG滑翔角的絕對值來消除主溫躍層對熱機性能的負面影響并提高UG的相關性能[42-44]。Xia等[45]分析了PCM熔化凝固的新型數學模型, 驗證了熔融率與膠囊過冷度的影響因素, 其研究結果為溫差能UG的設計提供了有用信息。在熱機的基本原理上, Ma等[46]建立了系統壓力與相變率之間關系的非線性模型, 綜合分析了影響系統壓力和儲能的因素。此外, Zhang等[47]還介紹了一種獨特的層間熱機, 其可有效提高溫差能UG的換熱效率。
1.6 波浪滑翔機
嚴格來說, 波浪滑翔機(wave glider)利用波浪能實現驅動, 只能完成水面表層觀測, 但其彌補了傳統UG信息采集的盲區, 是對采用傳統運動原理UG作業區域的補充, 是一種特殊的UG。波浪滑翔機最早由美國Liquid Robotics公司于2009年成功研發, 命名為Red Flash, 并完成了一系列海上試驗[48]。2011~2013年, 該型波浪滑翔機穿越太平洋, 打破了“無人船”最遠航程的世界紀錄。Red Flash波浪滑翔機由水面船和水下滑翔動力機構兩部分組成, 其整體結構如圖7所示。
我國對于波浪滑翔機的研究起步較晚。為增強我國海洋探索能力, 中國船舶重工集團公司第710研究所于2017年成功研制出了具有國際技術水平的波浪滑翔機“海鰩”, 并于同年6月成功海試, 見圖8。同期, 桑宏強等[49]共同參與的大型“黑珍珠”和小型“海哨兵”波浪滑翔機也研制成功并通過海試, 目前可小批量生產。
2 UG關鍵技術
2.1 浮力驅動技術
浮力驅動系統作為UG的關鍵部件, 是一套機、電、液耦合的液壓驅動和體積調整系統, 直接決定了整機的性能與可靠性, 并影響UG的航速、航程和可控性。浮力驅動系統通過改變外部油囊的體積來改變UG的凈浮力, 根據外部油囊體積的改變方式分為2類: 一類是利用液壓泵改變外部油囊體積或移動活塞來改變總排水體積的液壓方法[4-5], 如Slocum 電動滑翔機采用的單沖程柱塞泵方式和Seaglider、Spray滑翔機采用的往復式活塞泵方式; 另一類是通過PCM的熱脹冷縮改變外部油囊體積的熱機方法[6,17]。熱機方法可直接從環境中獲取實現自身沉浮所需要的能量, 極大減少了能量消耗, 但受到不同海域溫躍層深度的限制。而利用液壓泵改變外部油囊體積的液壓技術相對較成熟, 目前美國Slocum、Seaglider、Spray、ANT水下滑翔機以及法國Sea- Explorer, 其浮力驅動系統主要技術指標與天津大學開發的“海燕”UG對比情況[19, 25, 50-51]見表4。
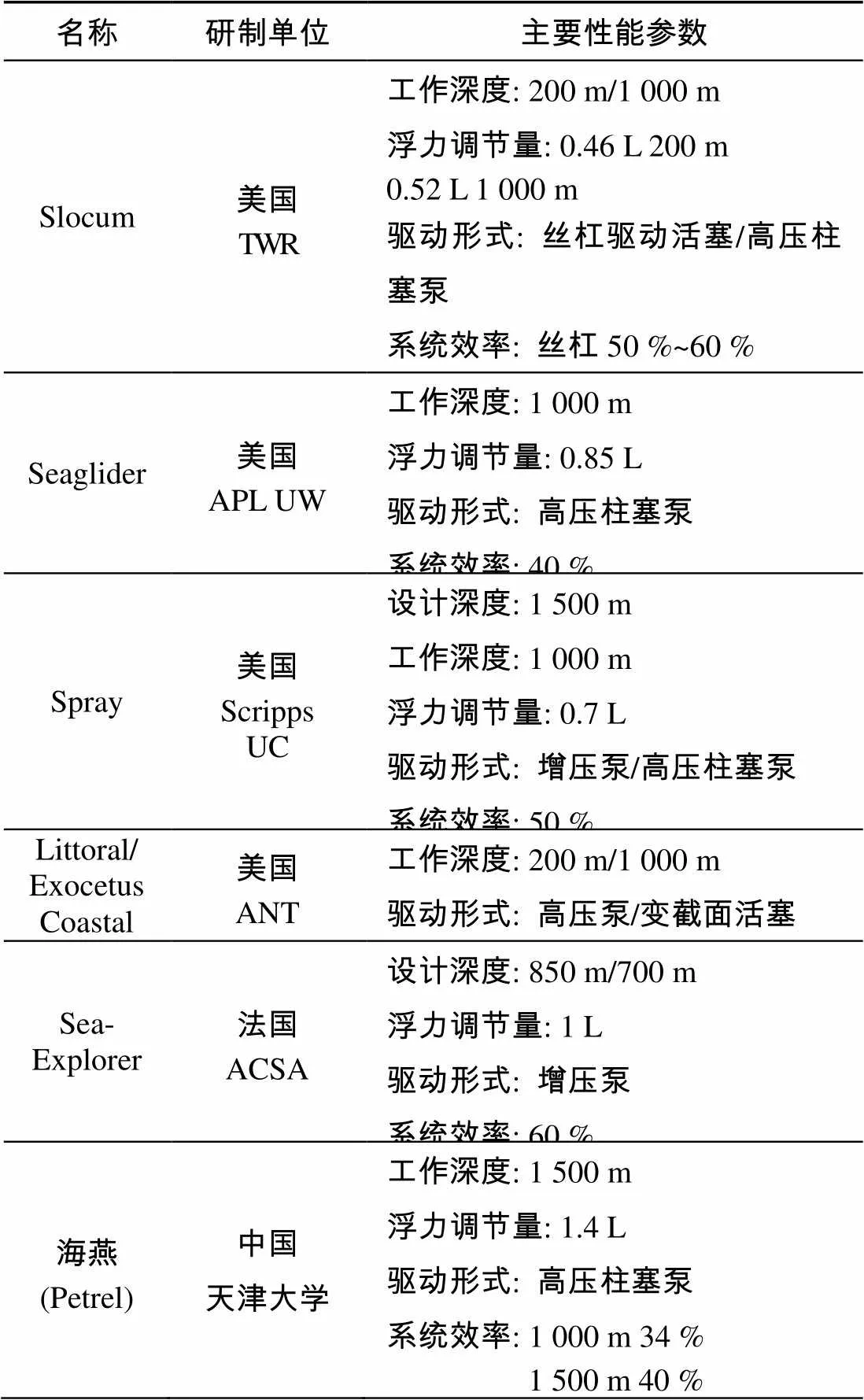
表4 典型水下滑翔機浮力驅動系統技術指標
同時, 為了滿足深海探測技術的需求, 美國的Deepglider滑翔機[52]、新西蘭Otago大學研制的UnderDOG UG, 以及日本海洋工程技術中心研制的大潛深2 100 m的高壓浮力驅動系統均采用以微型軸向柱塞泵為核心的高壓浮力驅動系統[53-55], 可見深海UG浮力驅動技術在大深度UG研發中的重要地位。
2.2 姿態控制技術
UG是一個由殼體、姿態調節及浮力調節等系統組成的多體系統。其中姿態調節系統是UG的重要組成部分, 一般分為“僅內部姿態調節技術”和“尾舵結合內部姿態調節技術”兩類。內部姿態調節系統通過控制艙內質量塊的移動實現對整機重心位置的調節, 從而達到有效的姿態控制, 其設計的優劣直接影響UG的性能。
1) 僅內部姿態調節
僅內部姿態調節系統由俯仰調節機構和橫滾調節機構構成。其中, 俯仰調節機構通過控制質量塊在UG軸線方向上的移動, 實現UG按照設定的滑翔角度沉浮; 橫滾調節機構則通過控制偏心質量塊的周向轉動調節UG的轉向。通過控制艙內質量塊軸向平移和周向轉動的內部姿態控制方法, 適用于深海UG, 如Spray[5], Slocum thermal[56], Seaglider[4]和Deepglider[28]滑翔機等均采用直流電機驅動偏心質量塊的方式進行姿態調節, 且質量塊通常為UG機艙內的電池包。國內天津大學研制的Petrel-II UG的姿態控制亦采用了這種方式, 將姿態控制系統置于UG殼體之內, 因此不必考慮姿態調節系統的高壓密封問題。
2) 尾舵結合內部姿態調節
通過采用艙內質量塊軸向平移和附連到UG尾部的方向舵尾舵調節姿態的UG結構相對簡單, 適用于執行地形地貌相對復雜的淺海水域任務。例如電能驅動Slocum UG采用步進電機調節尾舵轉向, 進而控制UG的轉向[3]。中國科學院沈陽自動化研究所研制的“海翼”號UG的姿態控制方式與電能驅動Slocum UG相似, 也是通過步進電機調節尾舵實現轉向, 從而調節UG的航向[57]。
2.3 多模混合推進技術
目前, 多模HUG的研究已經成為國際性研究熱點之一。由于其較好地補充了傳統UG航速低的問題, 在航速、功耗、航程、壽命及機動性和隱身性等方面綜合性能優良, 可以滿足更為廣闊的應用需求。目前, 多模HUG均采用浮力驅動為主, 輔以螺旋槳推進或噴水推進等, 在傳統水下滑翔運動之外, 實現動力滑翔、水平推進等功能, 一定程度上提高了UG的運動速度和機動性, 豐富了UG的運動模式。但上述功能的實現也不可避免地增加了UG的能耗, 減少了其續航能力。為此, UG的混合推進功能更多是針對具體的任務需求, 在平衡機動性和續航能力的基礎上進行總體優化設計。多模混合推進的設計方案, 一定程度上會造成UG運動失穩, 為此對UG運動穩定性和操控性均提出較高要求, 是需要解決的關鍵技術。針對此類難點, 天津大學對HUG的運動模式和穩定性進行系統分析[58-60], 設計開發了有翼HUG“海燕”[61-63]; 哈爾濱工程大學則設計了具有塑料外殼和水射流推進器的水下航行器[64-66]; Yue等[67-71]也設計開發了類似的水下航行器。
2.4 輕量化耐壓殼體技術
UG在水中運行時, 其所承受的海水壓力與下潛深度成正比。在承受外壓情況下, UG殼體發生變形, 會引起所受浮力的變化和耐壓殼體的失效。在確保殼體強度和穩定性的同時, 盡量減輕殼體質量并擴大內部空間和負載能力, 是最為理想的UG殼體優化技術。因此, 對UG耐壓殼體的結構進行優化設計也尤為重要[72]。為了使耐壓殼體既滿足工作需要, 又具有相對較輕的質量, 王兵振等[73]對UG耐壓殼體進行了結構參數分析, 擴大了UG中段的艙內空間, 減輕了殼體質量。田文龍等[15]通過對UG殼體和機翼的設計優化, 提出了一種新型高速UG, 并通過仿真分析驗證了其設計方法的優越性。而Song等[74]在優化UG主體外形和改進殼體材料的基礎上, 使用有限元分析對UG耐壓殼體進行了結構分析和尺寸優化。通過對UG二次開發, 自動生成了多氣泡壓力艙結構的參數化模型, He等[75]則利用克里金插值法和非支配排序遺傳算法對UG多氣泡壓力艙進行了多目標優化。
3 UG動力學與控制
3.1 動力學建模
動力學模型是UG運動性能分析和控制策略設計的理論基礎, 是開展UG研究的重要內容之一。UG通過液壓系統改變浮力, 在垂直平面中遵循鋸齒運動模式, 混合推進UG還具備在水平面上直線航行能力。其固定翼的水動力升力提供了UG的動能, 因此除了調整浮力之外, UG水平移動不需要額外的能量消耗。Graver與Bhatta等[76-77]最早建立了UG的動力學模型, 并開展了仿真分析, 此后許多學者均以此為基礎, 對各自研發的UG發展了適用的動力學模型。例如, Graver[78],Bhatta和Leonard[79]建立了描述Slocum UG行為的動力學模型和非線性動力學方程。基于細長體理論, Isa和Arshad[80-81], Noh和Arshad[82]為馬來西亞理科大學UG推導了動力學模型并進行了優化。Tian等[83]則根據波浪滑翔機的驅動原理, 建立了2D非線性動力學模型。針對浮力驅動UG運動時的能量變化, Ma等[84]建立了運動方程, 該結果有助于UG的設計和控制。此外, 上海交通大學胡仞與[85]則利用UG模型推導動力學方程, 對UG在垂直面內的運動進行了深入研究。為分析UG縱平面運動特性, 西北工業大學陳宇航等[86-87]通過運動學和動力學分析, 建立了較為完善的UG 3D空間數學模型。
UG通過旋轉的內部質量(如電池組)或結合尾舵來調節方向。盡管大多數UG系統中都觀察到了螺旋運行狀態, 但與垂直面中鋸齒形運動機制的研究相比, 其產生的基本機制仍然有待深入研究。針對這一難點, Kan等[88]給出了關于UG螺旋運動的一些模擬結果。應用微擾理論, Mahmoudian等[89-90]推導出了穩定螺旋運動的近似解析解。Zhang等[91]則簡化了水下滑翔動力學的方程, 使用一種遞推算法, 為其螺旋運動提供了快速解決方案。與常規UG相比, 混合驅動UG動力學模型的研究仍未完全成熟[92-93]。基于傳統UG動力學建模、常規水動力學和潛艇水動力學建模方法, Wang等[94]對混合動力UG的動力學模型進行了相應優化。而Isa[95]對UG的數學模型及其運動控制進行了分析。針對最小化傾斜角變化值的問題, Gao等[96]根據海上試驗觀測數據, 優化了UG非線性動力學模型。
3.2 控制方法

針對在非穩定、非均勻流中的UG操作控制問題, Fan等[102]提出了一種非線性多體動力學模型。從做功的角度, 馬冬梅等[103]提出了UG滑翔姿態的優化目標函數, 得出了基于其滑翔角的UG模型控制規律。針對混合推進UG的運動控制問題, Claus等[104]探討了基于鎮流器的深度控制器及其應用。楊海等[105]構造了新型前饋控制算法。Niu等[58]進行了混合推進UG的控制穩定域的分析, 對混合推進UG控制系統設計起到一定指導意義。而白樂強等[106]對混合驅動UG垂直面上的運動提出了一種基于逆模型和滑模控制的非線性控制方法, 該方法將原始系統解耦為2個單入單出的線性系統, 具有良好的控制性能, 而且對外界擾動具有一定的魯棒性。
4 UG編隊與協作觀測技術
UG載荷能力有限, 一般小于5 kg, 因此單臺UG的觀測或探測功能相對單一。為拓展UG的單機功能, 多機編隊與協作是其重要的發展和應用方向之一。UG的編隊與協作觀測技術以UG為核心裝備, 可涵蓋潛標系統、浮標系統、UUV等多種觀測系統平臺, 具有較好的拓展性, 可以大大提高移動觀測平臺執行復雜任務的綜合能力, 可滿足海洋觀測與探測復雜的任務需求, 將成為未來深、遠海移動觀測的重要技術手段之一。UG暫時還不具備水下通信能力, 無法實現多機水下通信, 為此每次UG浮出水面, 接受控制中心的指令并發送觀測數據, 輔助其編隊與協作觀測。多臺UG可以分別通過控制分段線性路徑, 實現對其管控, 達到UG的編隊與協作能力。
4.1 UG多機協作/協調技術
在一個典型的UG集群部署中, 多個UG可在相同的空間和時間上以適當的頻率對一個多變的海洋區域進行觀測與探測。因此, 多機協作/協調技術可提升UG等無人航行器海洋采樣、測繪、監視和通信等的作業效率和應用效果[107]。為此, Leonard等[108]提出了一個多UG的協調和分布式控制框架。Fiorelli等[109]則描述了一種多機協作控制方法, 并在蒙特利海灣進行了海上試驗。由于分布測量可提高UG集群組網測量性能, Paley等[110]在反饋控制協調UG軌跡采樣經驗的基礎上, 設計出了一套UG協調控制系統(glider coordinated control system, GCCS)。隨著對UG自主協作/協調技術的深入研究, 針對具有時變參考軌跡的多個UG的分布式協調跟蹤問題, Peng等[111]提出了一種神經動態控制設計方法, 可用之開發節點控制器, 以達到多機協調同步, 為UG多機編隊控制的研究提供參考。
為了更好地利用資源和分配任務, UG協作/協調系統在大規模海洋調查方面具有很大的應用前景[112]。同時使用集成有不同類型傳感器的UG, 可提高組網整體的觀測與探測性能, 減少任務執行時間, 提供更有效的觀測與探測數據, 近而提高執行任務的成功率。因此, 突破UG的編隊與協作觀測技術的難點, 可使得單機或者多機協作/協調的UG集群組網得到廣泛的應用。
4.2 國外發展現狀
1) 自主海洋采樣觀測網
上世紀90年代開始, 美國海軍研究院自主海洋采樣網(autonomous ocean sampling network, AOSN)項目研究啟動, 其可用于觀測大范圍近海及沿海區域內各種重要海洋現象[113]。在美海軍研究院支持下, AOSN分別于2000年、2003年和2006年在蒙特利海灣進行了一系列海洋觀測試驗。在試驗中, 多臺UG作為移動分布式的海洋參數自主采樣網絡節點, 在海洋環境參數采樣應用中顯示出卓越的優勢和廣闊的應用前景。
2) 近海水下持續監視網絡
美國近海水下持續監視網絡(persistent littoral undersea surveillance network, PLUSNet)是一種半自主控制的海底固定節點加水中機動節點的網絡化設施(見圖9)。該網絡由攜帶半自主任務傳感器的多個無人水下航行器(移動式通信節點)組成[114]。航行器間可以互相通信、自主決策, 實現多種任務執行功能, 可密切監視并預測海洋環境參數變化。其中UG等的主要任務為水文測量、海洋噪聲和水下目標噪聲偵測, 并快速生成瀕海環境態勢變化圖。
3) 綜合海洋觀測系統
美國海洋大氣署于2002年提出組建全國性的綜合海洋觀測系統(integrated ocean observing system, IOOS)網絡計劃[115]。由于UG在海洋觀測網中的重要作用, 海洋大氣署又于2012年8月初步提出國家水下滑翔機組網計劃(national glider network plan), 并成立數據中心, 采用統一的UG數據格式, 共享其觀測數據。IOOS是美國海洋現象觀測的有力工具, 具有良好應對海洋突發狀況的能力(見圖10)。
4) 歐洲水下滑翔機觀測網
為實現全球性、區域性及近海岸等不同范圍內的長期海洋觀測任務, 英國、法國、德國、意大利、西班牙和挪威等國家組成了歐洲水下滑翔機觀測網(European gliding observatories network, EGO)。2005~2014年4月底, EGO陸續布放了大約300臺次UG執行各種海洋觀測任務, 用于實時采集大西洋海域內的海洋剖面數據信息。
5) 澳大利亞綜合海洋觀測系統
基于美國和歐洲商品化的UG產品, 澳大利亞也進行了UG網絡構建技術的研究, 成立了澳大利亞綜合海洋觀測系統(Australian integrated marine observing system, IMOS)。該項目于2012~ 2013年共布放了包括Seaglider和Slocum在內的數十臺UG, 共計執行調查任務超過150個, 主要集中用于觀測澳洲東部、南部和西部邊界流, 促進了澳大利亞在UG協作組網應用技術方面的迅速發展。
4.3 國內發展現狀
2014年9月, 天津大學在我國西沙附近海域最早實現了3臺UG的編隊與協作觀測作業, 開展了初步嘗試。2017年7月, 中國科學院沈陽自動化研究所在南海海域布放了共計12臺“海翼”系列UG, 開始進行多機的協作觀測測試。同期, 天津大學依托青島海洋科學與技術國家實驗室, 聯合中國海洋大學、中船重工第710研究所、中山大學、復旦大學等高校和研究機構, 完成了最大規模的一次面向海洋“中尺度渦”現象的立體綜合觀測網的構建任務(見圖11)。其中, 移動觀測平臺包括“海燕”UG、各型波浪滑翔機等共計30余臺套國產海洋先進觀測裝備。與以往單機、單種平臺的觀測不同, 這次任務是綜合采用多種設備, 進行多參數、綜合、立體、協作、異構組網同步觀測, 是我國首次實現多種類水面和水下移動平臺、定點與固定平臺相結合的協作觀測, 有效提高了我國海洋觀測與探測及相關數據獲取的能力和水平。這次綜合調查所構建的立體觀測系統, 是我國區域海洋觀測的一個重要里程碑。但目前, 我國尚未在國家層面上開展基于UG的觀測網絡構建和長時續的業務化運行。
5 UG專用傳感器集成技術
UG載荷小、功耗低, 為此其應用的傳感器多在體積、質量和能耗方面進行了適應性改進, 以滿足UG的搭載要求。目前, 國內外UG已成功實現多種任務傳感器的集成與應用, 包括溫鹽深傳感器(conductivity temperature depth, CTD)、溶解氧傳感器/光學氧傳感器、海流計、水質傳感器、葉綠素熒光計、有色可溶性有機物傳感器、光學反向散射計、水聽器、高度計、聲學多普勒湍流剖面儀(acoustic doppler current profilers, ADCP)和剪切流傳感器等, 可為海洋物理、海洋生物化學和海洋聲學等現象的分析研究提供支撐。
隨著小型低能耗傳感器及其集成技術的發展成熟, 國內外集成有不同類型傳感器的UG逐年遞增, 不同UG可攜帶多種不同功能的傳感器負載, 完成不同的觀測與探測任務。UG任務傳感器搭載情況如圖12所示。
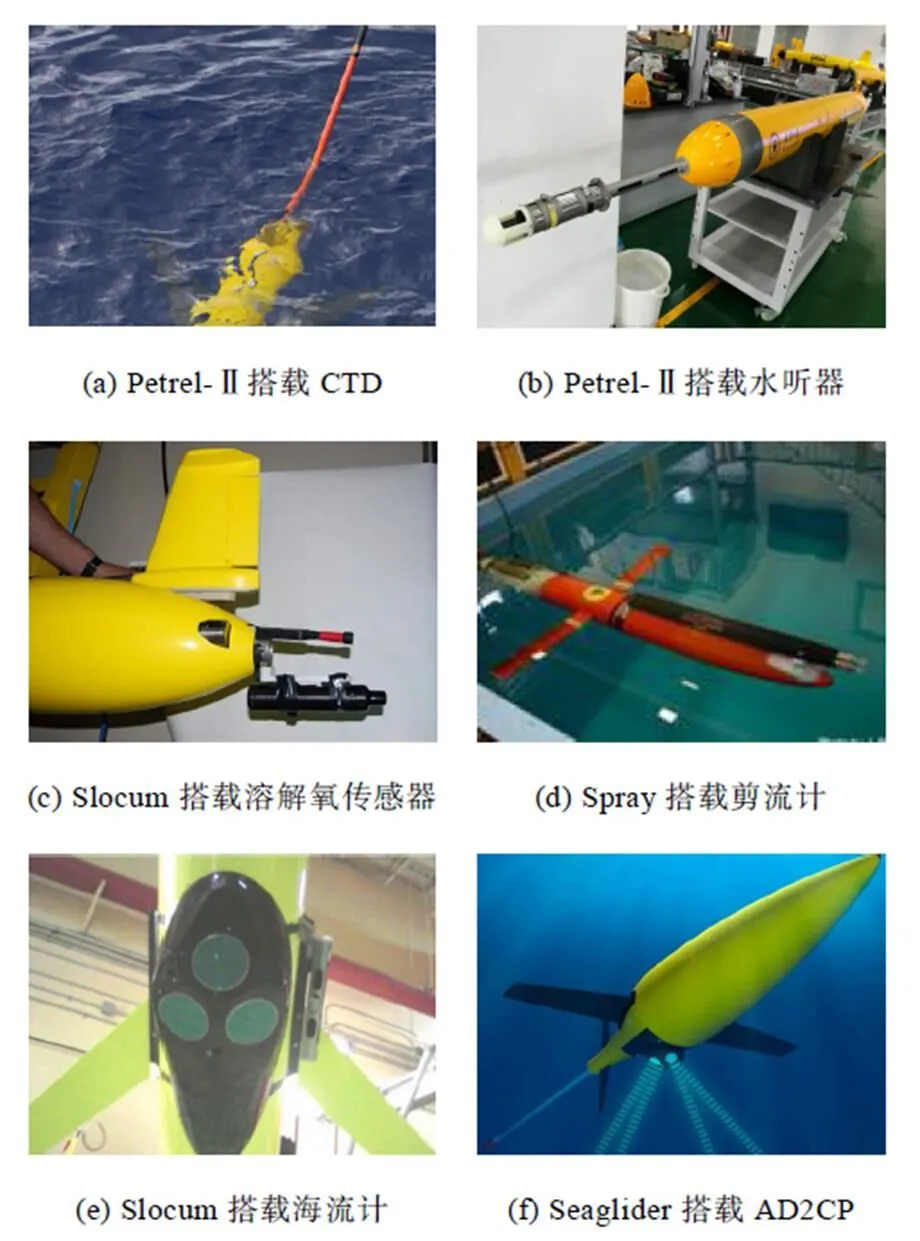
圖12 水下滑翔機搭載的各類傳感器
UG運動速度慢、穩定性好、噪音低, 無論在海洋微結構湍流觀測, 還是在聲學探測方面, 均為理想的傳感器搭載平臺。文中針對UG在聲學探測和湍流觀測兩方面的特殊應用做重點闡述。
5.1 聲學傳感器集成與應用
UG平臺可采集海洋空間尺度上的聲學和環境數據, 是開展海洋聲學研究的重要工具之一。2012年, Wall等[116]將水聽器集成于UG的后罩中, 成功地在大空間范圍內檢測到魚發出的聲音。2012年11~12月, 在緬因州中部海灣, 2臺UG采集了超過25000種由鯨魚等造成的聲學信號[117]。Guerra等[118]使用波浪滑翔機搭載的被動聲學監測設備記錄人類活動在海上產生的自然噪聲水平和聲學污染, 包括船舶交通等。應用Seaglider UG, Uffelen等[119]通過搭載聲學數字監視器記錄夏威夷群島鯨類聲音活動。Wall等[120]使用被動聲學UG技術, 探索美國東南部陸架大西洋水域的聲音信號。而Liu等[121]使用Petrel-II UG測量南海的水下噪聲, 得到并分析了UG軌跡上的水下噪聲譜圖。以上研究充分顯示了UG作為海洋聲學探測平臺的重要應用前景。
5.2 湍流傳感器集成與應用
使用UG開展海洋微結構湍流觀測, 也是其重要應用方面之一。為了驗證UG測量微結構湍流的可行性, Wolk等[122]將湍流傳感器安裝在Slocum UG中, 嘗試觀測海洋內波與混合等現象。Rudnick等[123]使用Spray UG, 在其頭部集成專用海洋微結構湍流傳感器, 于2007年4月~ 2008年7月進行了7次測量任務, 取得了較好的海洋剪切流數據, 并獲得微結構湍流分布特征(見圖13)。
為了更好地了解海洋溫躍層內的湍流特性, Schultze等[124]使用UG采集獲得連續7天和12天2組海洋微結構湍流數據集, 用于分析海洋湍流動能的耗散率, 發現了海洋溫躍層內湍流的部分規律。
綜上所述, 當前國外適用于UG搭載的小型、低耗傳感器設計與集成技術發展迅速, 已成功研發并實現UG與多種任務傳感器的集成, 應用于海洋環境參數觀測, 如壓力、電導率、溫度、湍流、海流、硝酸鹽以及溶解氧等, 且應用效果顯著[125]。我國雖然在海洋測量傳感器設計方面具有較好的基礎, 但目前除部分聲學傳感器外, UG平臺上所用傳感器大部分為進口設備, 仍缺少一定的技術積累。
6 數據格式與協議
UG已廣泛應用于海洋科學和地球科學領域, 改變了人類對于海洋信息的采集方式, 極大地拓展了人類對海洋認知的能力與范圍, 這些進展得益于UG日益獲取的大量數據。隨著國內外多型UG的廣泛應用, 其數據格式與協議的規范性也是推進其更大范圍應用的重要內容。UG作為一種測量海洋環境參數的新型工具, 已有的海洋信息數據的格式轉化對其具有很大的借鑒作用。
1999年, 實時地理海洋陣列觀測系統(array for real-time geostrophic oceanography system, ARGOS, 全球海洋觀測網的代稱)開始著手改變平臺ID等數據格式, 進行規范化和標準化管理。國外研究機構對UG觀測數據進行標準化時, 多采用與ARGOS數據基本相同的流程。2010年, 世界氣象組織提出了使用通用二進制表示氣象數據格式, 用以解碼NetCDF文件的編碼, 進行UG測量得到的物理和光學等參數數據的標準化。CF作為另一個主要的標準格式, 可提高由NetCDF API創建文件的處理和共享性能, 正逐漸被歐洲相關組織引用。使用這些規范的數據, 可對UG路徑實現更好的規劃。2011年, Smith等[126]指出對UG的觀測數據進行類似于ARGOS剖面的標準化處理辦法, 推進Slocum UG應用ARGOS數據格式與協議。
2007年, 美國SlocumUG采用數據可視化的文件傳輸協議, 在海面時發送UG平臺監控數據, 首次完成了海洋環境和工程數據的可視化[17]。2011年, 歐盟開啟滑翔機海洋觀測與管理研究(gliders for research, ocean observation and management, GROOM)項目, 開發完成了UG數據處理方法, 并允許GROOM項目參與者統一UG的數據格式, 以界面形式清晰、實時地展示UG的航行情況[127]。
7 UG發展趨勢
更長的續航能力、更大的載荷能力、更深的工作能力、更靈活多變的運行模式、更廣泛的工程應用是未來UG持續發展的目標。在UG混合推進和自主機動的背景下, 人工智能、深度學習、先進仿生等科技將打破UG的傳統模式, 賦予其更多的應用功能和廣闊前景, 因此這些新興技術將成為未來UG研究的前沿。該節將討論“可變翼UG技術”、“仿生UG技術”和“智能化UG” 3個新興研究方向的進展及其展望。
7.1 可變翼UG技術
傳統UG的機翼固定在機身上, 機翼不能隨著海洋環境和任務的變化做出適應性的調整, 其流體動力學參數也是固定的[3]。而具有可控機翼的UG具有可變的流體動力學參數, 能更好地實現其觀測任務。為了使UG能自適應復雜多變的海洋環境, Arima等[128]成功研發ALEX可變翼UG, 設想使用大量這種智能UG對海洋環境進行自適應觀測[129]。隨著新型材料科技的發展, Angilella等[130]提出的可變弧面翼, 利用海洋溫躍層中的溫度變化觸發植入的形狀記憶合金以改變機翼形狀(見圖14)[131]。而國內學者Yang等[132]設計的可變翼UG機翼可以實現3種形狀的變化運動, 包括沿2個軸的延伸及其機翼的旋轉, 該設計具有較大的工程實踐價值。
可變翼UG具有較高的環境自適應性和運動性能, 但因受限于現階段的基礎工藝水平, 一直發展的較為緩慢。而隨著生物科學、仿生技術的發展, 通過融合多種UG新興科技, 可變翼UG技術將成為未來UG智能化的基礎技術之一。
7.2 仿生UG技術
基于仿生學與多學科融合, 仿生UG將成為傳統UG逐步智能化的“中間環節”。經多年發展, 國內外仿生UG得到了一定的發展。德國Evo- Logics公司采用智能設計, 按照鰩魚進行仿生設計, 研制出一款仿生UG SubSeaglider。國內北京航空航天大學等多家科研單位根據魚類運動肌群和流體外形的運動原理, 進行了大量的UG仿生研究, 梳理了國內外仿生UG的發展現狀, 提出了未來發展趨勢[133]。其中, 西北工業大學朱崎峰等[134]根據UG運動原理設計了一種仿海龜撲翼UG, 打破了傳統UG的外形設計。中國科學院自動化研究所的Wu等[135-137]先后為“海豚”UG提供了一種創新設計和水動力分析, 其運動原理參照UG進行設計。針對傳統UG機動性較弱問題, 馬崢等[138]通過引入仿生推進設計技術, 借助水平翼運動增加UG的前進速度, 該研究也為未來仿生UG的研制提供技術依據和理論指導。
現有仿生UG的功能特性仍然與真實生物存在很大差距, 但隨著仿生結構、仿生材料、仿生控制、仿生能量和生物信息智能感知等領域的持續發展, 在融合仿生技術和人工智能技術的基礎上, UG預計能夠智能自主或協作完成各種復雜任務。
7.3 智能化UG技術
隨著大數據分析、深度學習與人工智能等技術的發展, UG正向“智能一代”躍進, 因此, 智能化研發已經成為當前UG研發的必然趨勢。人工智能技術必將成為UG等海洋高端裝備為載體的未來海洋觀測與探測系統的大腦[139]。美國是智能化海洋觀測與探測技術的領導者, 歐洲也非常重視智能化海洋觀測與探測技術的發展, 并著力推進以UG為載體的海洋觀測與探測技術的發展。伴隨著人工智能技術的飛速發展, 我國海軍也越發注重人工智能的創新和應用, 并于2017年發布了裝備預研創新項目指南, 其中人工智能技術成為重點。
隨著深度學習技術的進步, 人工智能最近幾年在智能感知識別領域取得了突破性的進展[140-141]。由于海洋環境的特殊性, 決定了UG面臨著嚴峻的功耗、通信能力和計算能力的限制。因此, 發展UG人工智能技術, 可實現基于海洋環境場數據及UG自身的數據, 結合新興發展的人工智能先進理論, 實現UG對海洋環境的準實時智能感知; 并在此基礎上結合流體力學和機構學理論, 優化UG結構、性能及各種控制參量, 以增強其完成各種復雜海洋環境的探測和自主選擇運行策略能力, 實現UG對海洋突發情況的應急處理和智能調節, 從而達到UG自主、安全、低能耗運行的目的。
綜上所述, 著眼于人工智能技術和UG的發展, UG智能化發展趨勢應是利用仿生、傳感器、通信、互聯網等技術手段, 自動感知和獲取自身指標、海洋環境及網絡中其他觀測設備的信息和數據, 并基于計算機技術、自動控制技術和大數據處理分析技術, 實現其智能化運行, 并具有實時監測、分析成像以及智能管控等特征。
總之, UG系統在國內外已廣泛應用, 在諸多方面也已顯示了其重要的應用價值。但由于海洋環境的特殊性和復雜性, 決定了UG還面臨著功耗高、通信能力和計算能力相對較弱等技術瓶頸。因此, 研究具有低功耗、大計算控制、智能感知、目標識別和協同組網觀測等技術的UG, 將具有非常廣闊的應用前景。在這些方面, 可變翼技術、仿生技術和人工智能等技術有顯著的應用需求, 并具有較大的發展空間。
8 結束語
UG平臺系統及其相關技術仍在高速發展中, 而為了滿足我國海洋經濟發展、災害預防、海洋科學與國防科技等各類需求, 還需要進一步的研究UG平臺及其協作組網觀測技術。文中對現有UG單機核心技術、動力學與控制技術發展現狀的歸納, 對UG編隊與協作觀測技術、數據格式與協議和適用于UG平臺的傳感器融合與集成技術應用等方面重要進展的總結, 及對未來UG技術發展方向的展望, 將有助于UG本體性能和應用領域的進一步擴展。
[1] Leonard N E, Paley D A, Lekien F, et al. Collective Motion, Sensor Networks, and Ocean Sampling[J]. Proceeding of the IEEE, 2007, 95(1): 48-74.
[2] Stommel H. The Slocum Mission[J]. Oceanography, 1989, 2(1): 22-25.
[3] Webb D C, Simonetti P J, Jones C P. SLOCUM: an Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-452.
[4] Eriksen C C, Osse T J, Light R D, et al. Seaglider: a Long-Range Autonomous Underwater Vehicle for Oceanographic Research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436.
[5] Sherman J, Davis R E, Owens W B, et al. The Autonomous Underwater Glider “Spray”[J]. Oceanic Engineering IEEE Journal of, 2001, 26(4): 437-446.
[6] 王樹新, 王延輝, 張大濤, 等. 溫差能驅動的水下滑翔機設計與實驗研究[J]. 海洋技術學報, 2006, 25(1): 1-5.
Wang Shu-xin, Wang Yan-hui, Zhang Da-tao, et al. Design and Trial on an Underwater Glider Propelled by Thermal Engine[J]. Ocean Technology, 2006, 25(1): 1-5.
[7] 王樹新, 李曉平, 王延輝, 等. 水下滑翔器的運動建模與分析[J]. 海洋技術學報, 2005, 24(1): 5-9.
Wang Shu-xin, Li Xiao-ping, Wang Yan-hui, et al. Dynamic Modeling and Analysis of Underwater Gliders[J]. Ocean Technology, 2005, 24(1): 5-9.
[8] 秦玉峰, 張選明, 孫秀軍, 等. 混合驅動水下滑翔機高效推進螺旋槳設計[J]. 海洋技術學報, 2016, 35(3): 40- 45.
Qin Yu-feng, Zhang Xuan-ming, Sun Xiu-jun, et al. Design of a High-Efficiency Propeller for Hybrid Drive Underwater Gliders[J]. Ocean Technology, 2016, 35(3): 40-45.
[9] Liu Y, Luan X, Song D, et al. Simulation for Path Planning of OUC-II Glider with Intelligence Algorithm [C]//Intelligent Robotics and Applications: 10th International Conference, ICIRA 2017. Wuhan: Springer, 2017: 801-812.
[10] 陳剛, 張云海, 趙加鵬. 基于混合模型的水下滑翔機最佳升阻比特性[J]. 四川兵工學報, 2014(2): 150-152.
Chen Gang, Zhang Yun-hai, Zhao Jia-peng. Optimum Lift-drag Ratio of the Underwater Glider Based on Mixture Models[J]. Journal of Sichuan Ordnance, 2014(2): 150-152.
[11] 馬冬梅, 馬崢, 張華, 等. 水下滑翔機水動力性能分析及滑翔姿態優化研究[J]. 水動力學研究與進展, 2007, 22(6): 703-708.
Ma Dong-mei, Ma Zheng, Zhang Hua, et al. Hydrodynamic Analysis and Optimization on the Gliding Attitude of the Underwater Glider[J]. Journal of Hydrodynamics, 22(6): 703-708.
[12] 李寶仁, 傅曉云, 楊鋼, 等. 一種噴水推進型深海滑翔機: CN203581363U[P]. 2014-5-7.
[13] 倪園芳. 溫差能驅動水下滑翔機性能的研究[D]. 上海: 上海交通大學, 2008.
[14] Yang C, Peng S, Fan S. Performance and Stability Analysis for ZJU Glider[J]. Marine Technology Society Journal, 2014, 48(3): 88-103.
[15] 田文龍, 宋保維, 劉鄭國. 可控翼混合驅動水下滑翔機運動性能研究[J]. 西北工業大學學報, 2013, 31(1): 122-128.
Tian Wen-long, Song Bao-wei, Liu Zheng-guo. Motion Characteristic Analysis of a Hybrid-Driven Underwater Glider with Independently Controllable Wings[J]. Journal of Northwestern Polytechnical University, 2013, 31(1): 122-128.
[16] 楊豪, 陳濟民, 初再宇. 圓碟形水下滑翔機的創新設計及應用前景[J]. 硅谷, 2015(4): 24-25.
[17] Schofield O, Kohut J, Aragon D, et al. Slocum Gliders: Robust and ready[J]. Journal of Field Robotics, 2010, 24(6): 473-485.
[18] Rudnick D L, Davis R E, Sherman J T. Spray Underwater Glider Operations[J]. Journal of Atmospheric and Oceanic Technology, 2016, 33(6): 1113-1122.
[19] Rudnick D L, Davis R E, Eriksen C C, et al. Underwater Gliders for Ocean Research[J]. Marine Technology Society Journal, 2004, 38(2): 73-84.
[20] Woithe H C, Chigirev I, Aragon D, et al. Slocum Glider Energy Measurement and Simulation Infrastructure[C]// Oceans 2010. Sydney: IEEE, 2010.
[21] Кожемякин И В, Блинков А П, Рождественский К В, etal. Перспективные Платформы Морской Робототехнической Системы И Некоторые Варианты Их Применения[J]. Известия Южного федерального университета. Технические науки, 2016(1): 174.
[22] Bachmayer R, Leonard N E, Graver J, et al. Underwater Gliders: Recent Developments and Future Applications [C]//International Symposium on Underwater Technology. Taipei: IEEE, 2004.
[23] Claustre H, Beguery L, Patrice P L A. SeaExplorer Glider Breaks Two World Records Multisensor UUV Achieves Global Milestones for Endurance, Distance[J]. Sea Technology, 2014, 55(3): 19-22.
[24] Wood S L, Mierzwa C E. State of Technology in Autonomous Underwater Gliders[J]. Marine Technology Society Journal, 2013, 47(5): 84-96.
[25] Alvarez A, Caffaz A, Caiti A, et al. Fòlaga: A Low-cost Autonomous Underwater Vehicle Combining Glider and AUV Capabilities[J]. Ocean Engineering, 2009, 36(1): 24-38.
[26] Ma W, Wang Y, Yang S, et al. Observation of Internal Solitary Waves Using an Underwater Glider in the Northern South China Sea[J/OL]. Journal of Coastal Research, 2018, (2018-03-27)[2018-03-28].https://doi.org/10.2112/JCOASTRES-D-17-00193.1.
[27] 劉方. 混合驅動水下滑翔機系統設計與運動行為研究[D]. 天津: 天津大學, 2014.
[28] Osse T J, Eriksen C C. The Deepglider: A Full Ocean Depth Glider for Oceanographic Research[C]//Oceans. Vancouver: IEEE, 2007: 1-12.
[29] Yu J, Jin W, Tan Z, et al. Development and Experiments of the Sea-Wing7000 Underwater Glider[C]//Anchorage, AK, USA: Oceans–Anchorage, 2017.
[30] Stephen. Autonomous Underwater Gliders[J]. InTech, 2009, 47(5): 84-96.
[31] D’Spain G L, Jenkins S A, Zimmerman R, et al. Underwater Acoustic Measurements with the Liberdade/X-Ray Flying Wing Glider[J]. Acoustical Society of America Journal, 2005, 117(4): 2624.
[32] Arima M, Tonai H, Yoshida K. Development of an Ocean-Going Solar-Powered Underwater Glider[C]//The Twenty-fourth International Ocean and Polar Engineering Conference. International Society of Offshore and Polar Engineers. Busan: International Society of Offshore and Polar Engineers, 2014: 444-448.
[33] Hildebrand J A, D'Spain G L, Roch M A, et al. Glider-based Passive Acoustic Monitoring Techniques in the Southern California Region[R]. La Jolla: Scripps Institution of Oceanography, 2009.
[34] 孫春亞, 宋保維, 王鵬. 翼身融合水下滑翔機外形優化設計[J]. 水下無人系統學報, 2017, 25(1): 68-75.
Sun Chun-ya, Song Bao-wei, Wang Peng. Shape Optimization Design of Blended-Wing-Body Underwater Glider[J]. Journal of Unmanned Undersea Systems, 2017, 25(1): 68-75.
[35] 何衍儒, 宋保維, 曹永輝. 基于Pareto最優的翼身融合水下滑翔機結構優化設計[J]. 水下無人系統學報, 2017, 25(3): 243-249.
He Yan-ru, Song Bao-wei, Cao Yong-hui. Structure Optimization Design for Underwater Glider with Blended-Wing-Body Based on Pareto Optimal Solution[J]. Journal of Unmanned Undersea Systems, 2017, 25(3): 243-249.
[36] Webb D C, Simonetti P J, Jones C P. SLOCUM: an Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447- 452.
[37] Lippsett L, Carlowicz M. “Green” Energy Powers Undersea Glider[EB/OL]. (2008-09-25)[2018-3-14]. http://www.whoi. edu/oceanus/feature/green-energy-powers-undersea-glider.
[38] Jones C, Webb D, Glenn S, et al. Slocum Glider Extending the Endurance[C]//The 16th International Symposium on Unmanned Untethered Submersible Technology. Durham: IEEE, 2009.
[39] Jones C, Allsup B, DeCollibus C. Slocum Glider: Expanding Our Understanding of the Oceans[C]//Oceans 2014. St. John's: IEEE, 2014.
[40] 王延輝, 王樹新, 謝春剛. 基于溫差能源的水下滑翔器動力學分析與設計[J]. 天津大學學報, 2007, 40(2): 133- 138.
Wang Yan-hui, Wang Shu-xin, Xie Chun-gang. Dynamic Analysis and System Design on an Underwater Glider Propelled by Temperature Difference Energy[J]. Journal of Tianjin University, 2007, 40(2): 133-138.
[41] 王延輝, 張宏偉, 武建國. 新型溫差能驅動水下滑翔機系統設計[J]. 船舶工程, 2009, 31(3): 51-54.
Wang Yan-hui, Zhang Hong-wei, Wu Jian-guo. Design of a New Type Underwater Glider Propelled by Temperature Di- fference Energy[J]. Ship Engineering, 2009, 31(3): 51-54.
[42] Farid M M, Khudhair A M, Razack S A K, et al. A Review On Phase Change Energy Storage: Materials And Applications[J]. Energy Conversion & Management, 2004, 45(9): 1597-1615.
[43] Sharma A, Tyagi V V, Chen C R, et al. Review on Thermal Energy Storage with Phase Change Materials and Applications[J]. Renewable & Sustainable Energy Reviews, 2009, 13(2): 318-345.
[44] Verma P, Varun, Singal S. Review of Mathematical Modeling on Latent Heat Thermal Energy Storage Systems Using Phase-Change Material[J]. Renewable & Sustainable Energy Reviews, 2008, 12(4): 999-1031.
[45] Xia Q, Chen Y, Zang Y, et al. Ocean Profiler PowerSystem Driven by Temperature Difference Energy[C]//Anchorage, AK, USA:Oceans–Anchorage, 2017.
[46] Ma Z, Wang Y, Wang S, et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy, 2016, 178(C): 557-566.
[47] Zhang H W, Wang Y H, Lian Z G. Application and Improvement of the Interlayer Thermal Engine Powered by Ocean Thermal Energy in an Underwater Glider[C]//Power and Energy Engineering Conference. Wuhan: IEEE, 2009.
[48] Hine R, Willcox S, Hine G, et al. The Wave Glider: A Wave-Powered Autonomous Marine Vehicle[C]//Oceans 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges. Biloxi: IEEE, 2009.
[49] 桑宏強, 李燦, 孫秀軍. 波浪滑翔器縱向速度與波浪參數定量分析[J]. 水下無人系統學報, 2018, 26(1): 16-22
Sang Hong-qiang, Li Can, Sun Xiu-jun. Quantitative Analysis on Longitudinal Velocity and Wave Parameter of Wave Glider[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 16-22
[50] Davis R E, Eriksen C C, Jones C P. Autonomous Buoyancy-Driven Underwater Gliders[M]//The Technology and Applications of Autonomous Underwater Vehicles, chapter 3. UK: CRC Press, 2002.
[51] ALSEAMAR. Seaexplorer[E/OL]. [2018-03-28]. https:// www.alseamar-alcen.com/products/underwater-glider/seaexplorer.
[52] Osse T J, Eriksen C C. The Deepglider: A Full Ocean Depth Glider for Oceanographic Research[C]//Oceans 2007. Vancouver: IEEE, 2007.
[53] Townsend N C, Shenoi R A. Feasibility Study of a New Energy Scavenging System for an Autonomous Underwater Vehicle[J]. Autonomous Robots, 2016, 40(16): 1-13.
[54] Asakawa K, Watare K, Ohuchi H, et al. Buoyancy Engine Developed for Underwater Gliders[J]. Advanced Robotics, 2016, 30(1): 41-49.
[55] Ma Z, Wang Y, Wang S, et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy, 2016, 178: 557-566.
[56] Alvarez A. Redesigning the SLOCUM Glider for Torpedo Tube Launching[J]. IEEE Journal of Oceanic Engineering, 2010, 35(4): 984-991.
[57] 金文明, 俞建成, 張奇峰, 等. 一種水下滑翔機用姿態調節裝置: CN102050218B[P]. 2013-06-12.
[58] Niu W D, Wang S X, Wang Y H, et al. Stability Analysis of Hybrid-driven Underwater Glider[J]. China Ocean En- gineering, 2017, 31(5): 528-538.
[59] Yang Y, Liu Y, Zhang L, et al. Influence of the Propeller on Motion Performance of HUGs[C]//Oceans 2016. Shanghai: IEEE, 2016.
[60] Lei Z, Wang Y, Zhang L, et al. Uncertainty Behavior Research of Hybrid Underwater Glider[C]//Oceans 2016. Shanghai: IEEE, 2016.
[61] 秦玉峰, 孫秀軍, 林興華, 等. 水下滑翔機低速螺旋槳的推進效率[J]. 解放軍理工大學學報(自然科學版), 2017, 18(1): 61-67.
Qin Yu-feng, Sun Xiu-jun, Lin Xing-hua, et al. Propulsive Efficiency of Low Rotation Propeller for Underwater Glider[J]. Journal of PLA University of Science and Tech- nology(Natural Science Edition), 2017, 18(1): 61-67.
[62] Wang S X, Sun X J, Wang Y H. Dynamic Modeling and Motion Simulation for A Winged Hybrid-Driven Underwater Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[63] Liu F, Wang Y, Niu W, et al. Hydrodynamic Performance Analysis and Experiments of a Hybrid Underwater Glider with Different Layout of Wings[C]//Oceans 2014. Taipei: IEEE, 2014.
[64] Guo S, Du J, Ye X, et al. Real-time Adjusting Control Method Based on Attitude Sensor Signal Feedback and Its Application in Spherical Underwater Vehicle[C]//2010 IEEE International Conference on Information and Automation (ICIS). Harbin: IEEE, 2010.
[65] Guo S, Du J, Ye X, et al. The Computational Design of a Water Jet Propulsion Spherical Underwater Vehicle[C]// 2011 IEEE International Conference on Mechatronics and Automation. Beijing: IEEE, 2011.
[66] Guo S, Du J, Ye X, et al. Realtime Adjusting Control Algorithm for the Spherical Underwater Robot[J]. International Journal on Information, 2010, 13(6): 2021-2029.
[67] Yue C, Guo S, Lin X, et al. Analysis and Improvement of The Water-Jet Propulsion System of a Spherical Underwater Robot[C]/International Conference on Mechatronics and Automation. Chengdu: IEEE, 2012.
[68] Guo S, Lin X, Tanaka K, et al. Develpoment and Control of a Vectored Water-jet-based Spherical Underwater Vehicle[C]//Information and Automation(ICIA), 2010 IEEE International Conference. Harbin: IEEE, 2012.
[69] Lin X, Guo S, Tanaka K, et al. Development and Evaluation of a Vectored Water-Jet-Based Spherical Underwater Vehicle[J]. International Journal on Information, 2010, 13(6): 1985-1998.
[70] Guo S, Lin X, Hata S. A Conceptual Design of Vectored Waterjet Propulsion System[C]//International Conference on Mechatronics and Automation. Changchun: IEEE, 2009.
[71] Lin X, Guo S, Hao Y, et al. A Simplified Dynamics Modeling of a Spherical Underwater Vehicle[C]//The 2008 IEEE International Conference on Robotics and Biomimetics. Bangkok: IEEE, 2008.
[72] Liu J, Wang Y H, Liu Y H, et al. Optimization Design for the Pressure Shell of Autonomous Underwater Glider Based on GDO Method[J]. Applied Mechanics & Materials, 2013, 312: 80-84.
[73] 王兵振, 朱光文, 任煒, 等. 水下滑翔機耐壓殼體的設計與優化[J]. 海洋技術學報, 2008, 27(2): 9-11.
Wang Bing-zhen, Zhu Guang-wen, Ren Wei, et al. Design and Optimization of Pressure Case for Underwater Glider[J]. Ocean Technology, 2008, 27(2): 9-11.
[74] Song D L, Chen L P, Wang Y F, et al. Optimal Structure Design and Analysis of Pressure Hull for the Underwater Glider[J]. Advanced Materials Research, 2014, 850-851: 317-321.
[75] He Y, Song B, Dong H. Multi-Objective Optimization Design for the Multi-Bubble Pressure Cabin in BWB Underwater Glider[J]. International Journal of Naval Architecture&Ocean Engineering, 2017, 11[2018-03-28]. https: //doi.org/10.1016/j.ijnaoe.2017.08.007.
[76] Graver J G, Leonard N E. Underwater Glider Dynamics and Control[C]//12th International Symposium on Unmanned Untethered Submersible Technology. Durham: Autonomous Undersea Systems Institute (AUSI), 2001.
[77] Bhatta P, Leonard NE. Nonlinear Gliding Stability and Control for Vehicles with Hydrodynamic Forcing[J]. Automatica, 2008, 44(5): 1240–1250.
[78] Graver G J. Underwater Gliders: Dynamics, Control and Design[J]. Journal of Fluids Engineering, 2005, 127(3): 523-528.
[79] Bhatta P, Leonard N E. A Lyapunov Function for Vehicles with Lift and Drag: Stability of Gliding[C]//IEEE Conference on Decision and Control. Nassau: IEEE, 2004.
[80] Isa K, Arshad M R. Motion Simulation for Propeller-Driven USM Underwater Glider with Controllable Wings and Rudder[C]//2nd International Conference on Instrumentation Control and Automation. Bandung: IEEE, 2011.
[81] Isa K, Arshad M R. Dynamic Modeling and Characteristics Estimation for USM Underwater Glider[C]//Control and System Graduate Research Colloquium(ICSGRC). Shah Alam: IEEE, 2011.
[82] Noh M M, Arshad M R, Mokhtar R M. Modeling of USM Underwater Glider(USMUG)[C]//International Conference on Electrical, Control and Computer Engineering. Pahang: IEEE, 2011.
[83] Tian B, Yu J, Zhang A, et al. Dynamics Analysis of Wave-Driven Unmanned Surface Vehicle in Longitudinal Profile[C]//Oceans 2014. Taipei: IEEE, 2014.
[84] Ma Z, Zhang H, Zhang N, et al. Study on Energy and Hydrodynamic Performance of the Underwater Glider[J]. Journal of Ship Mechanics, 2006, 10(3): 53-60.
[85] 胡仞與. 水下滑翔機垂直面運動研究[D]. 上海: 上海交通大學, 2008.
[86] 陳宇航, 高劍, 杜亮. 水下滑翔機建模與縱向運動控制[J]. 火力與指揮控制, 2012, 37(4): 141-145.
Chen Yu-hang, Gao Jian, Du Liang. Modeling and Vertical Motion Control of Underwater Glider[J]. Fire Control & Command Control, 2012, 37(4): 141-145.
[87] 張福斌, 汪剛, 陳宇航, 等. 水下滑翔機建模與運動PID控制[J]. 魚雷技術, 2011, 19(2): 114-119.
Zhang Fu-bin, Wang Gang, Chen Yu-hang, et al. Modeling and PID Control of Underwater Glider Motion[J]. Torpedo Technology, 2011, 19(2): 114-119.
[88] Kan, L, Zhang, Y, Fan, H, et al. MATLAB-Based Simulation of Buoyancy-Driven Underwater Glider Motion[J]. Journal of Ocean University of China, 2008, 7(1): 113-118.
[89] Mahmoudian N, Geisbert J, Woolsey C. Approximate Analytical Turning Conditions for Underwater Gliders: Implications for Motion Control and Path Planning[J]. IEEE Journal of Oceanic Engineering, 2010, 35(1): 131-143.
[90] Mahmoudian N, Woolsey C. Underwater Glider Motion Control[C]//Decision and Control, 2008. CDC 2008. 47th IEEE Conference. Cancun: IEEE, 2008.
[91] Zhang S, Yu J, Zhang A, et al. Steady Three Dimensional Gliding Motion of an Underwater Glider[C]// Robotics and Automation (ICRA), 2011 IEEE International Conference. Shanghai: IEEE, 2011.
[92] 何漫麗. 水下自航行器水動力學特性數值計算與試驗研究[D]. 天津: 天津大學, 2005.
[93] 武建國. 混合驅動水下滑翔機系統設計與性能分析[D]. 天津: 天津大學, 2010.
[94] Wang S, Sun X, Wang Y, et al. Dynamic Modeling and Motion Simulation for a Winged Hybrid-Driven Under- water Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[95] Isa K, Arshad M R. Modeling and Motion Control of a Hybrid-Driven Underwater Glider[J]. Indian Journal of Geo-Marine Sciences, 2013, 42(8): 971-979.
[96] Gao L, Li B, Gao L. Physical Modeling for the Gradual Change of Pitch Angle of Underwater Glider in Sea Trial[J/OL]. IEEE Journal of Oceanic Engineering, 2017, 11: 1-8 (2017-11-27)[2018-03-28]https://doi.10.1109/JOE.2017.2769918.
[97] Leonard N E, Graver J G. Model-based Feedback Control of Autonomous Underwater Gliders[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 633-645.
[98] Zhang F. Cyber-Maritime Cycle: Autonomy of Marine Robots for Ocean Sensing[J]. Foundations and Trends in Robotics, 2016, 5(1): 1-115.
[99] Paley D, Zhang F, Leonard N E. Cooperative Control for Ocean Sampling: The Glider Coordinated Control System[J]. IEEE Transactions on Control System Technology, 2008, 16(4): 735-744.
[100] 王延輝. 水下滑翔器動力學行為與魯棒控制策略研究[D]. 天津: 天津大學, 2007.
[101] Xiang X, Yu C, Lapierre L, et al. Survey on Fuzzy- Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles[J]. International Journal of Fuzzy Systems, 2018, 20(2): 572-586.
[102] Fan S, Woolsey C A. Dynamics of Underwater Gliders in Currents[J]. Ocean Engineering, 2014, 84(84): 249-258.
[103] 馬冬梅, 馬崢, 張華, 等. 水下滑翔機水動力性能分析及滑翔姿態優化研究[J]. 水動力學研究與進展, 2007, 22(6): 703-708.
[104] Claus B, Bachmayer R, Cooney L. Analysis and Development of a Buoyancy-Pitch Based Depth Control Algorithm for a Hybrid Underwater Glider[C]//Autonomous Underwater Vehicles, 2012 IEEE/OES. Southampton: IEEE, 2012.
[105] 楊海. 考慮輸入受限的水下滑翔機前饋控制設計[J]. 中國艦船研究, 2014, 9(6): 87-91.
Yang Hai. Feedforward Control Design for Autonomous Underwater Gliders Under Input Constraints[J]. Chinese Journal of Ship Research, 2014, 9(6): 87-91.
[106] 白樂強, 邢建生, 唐元貴. 基于逆模型的混合驅動水下滑翔機垂直面控制[J]. 計算機測量與控制, 2015, 23(10): 3357-3360.
Bai Le-qiang, Xing Jian-sheng, Tang Yuan-gui. Longitudinal Control for Hybrid-driven Underwater Glider Based on Inverse System[J]. Computer Measurement & Control, 2015, 23(10): 3357-3360.
[107] Curtin T B, Bellingham J G, Catipovic J, et al.Autonomous Oceanographic Sampling Networks[J]. Oceanography, 1989, 6(3): 86-94.
[108] Leonard N E, Paley D A, Lekien F, et al. Collective Motion, Sensor Networks and Ocean Sampling[J]. Proceeding of the IEEE, 2007, 95(1): 48-74.
[109] Fiorelli E, Leonard N E, Bhatta P, et al. Multi-AUV Control and Adaptive Sampling in Monterey Bay[J]. IEEE Journal of Oceanic Engineering, 2006, 31(4): 935-948.
[110] Paley D A, Zhang F, Leonard N E. Cooperative Control for Ocean Sampling: The Glider Coordinated Control System[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 735-744.
[111] Peng Z, Wang D, Wang H, et al. Distributed Coordinated Tracking of Multiple Autonomous Underwater Vehicles[J]. Nonlinear Dynamics, 2014, 78(2): 1261-1276.
[112] Xue D Y, Wu Z L, Wang Y H, et al. Coordinate Control, Motion Optimization and Sea Experiment of a Fleet of Petrel-II Gliders[J]. Chinese Journal of Mechanical Engineering, 2018, 31(1): 17.
[113] Fratantoni D M, Haddock S H D. Introduction to the Autonomous Ocean Sampling Network(AOSN-II) Program[J]. Deep Sea Research Part II Topical Studies in Oceanography, 2009, 56(3-5): 61.
[114] Grund M, Freitag L, Preisig J, et al. The PLUSNet Underwater Communications System: Acoustic Telemetry for Undersea Surveillance[C]//Oceans 2006, Boston: IEEE, 2006.
[115] Harlan J, Terrill E, Hazard L, et al. The Integrated Ocean Observing System High-Frequency Radar Network: Status and Local, Regional, and National Applications[J]. Ma- rine Technology Society Journal, 2010, 44(6): 122-132.
[116] Wall C C, Lembke C, Mann D A. Shelf-scale Mapping of Sound Production by Fishes in the Eastern Gulf of Mexico, Using Autonomous Glider Technology[J]. Marine Ecology Progress, 2012, 449(449): 55-64.
[117] Baumgartner M F, Fratantoni D M, Hurst T P, et al. Real-time Reporting of Baleen Whale Passive Acoustic Detections from Ocean Gliders[J]. Journal of the Acoustical Society of America, 2013, 134(3): 1814-1823.
[118] Guerra L A A, Soares-Filho W, Barreira L M, et al. Brazil Offshore Underwater Acoustic Noise Monitoring Using Autonomous Marine Vehicle[C]//XII ETAS-Encontro de Tecnologia em Acústica Submarina. Rio de Janeiro: XII ETAS- Encontro de Tecnologia em Acústica Submarina. 2016, 11-8-10.
[119] Uffelen L J V, Roth E H, Howe B M, et al. A Seaglider- Integrated Digital Monitor for Bioacoustic Sensing[J]. IEEE Journal of Oceanic Engineering, 2017, 42(4): 800-807.
[120] Wall C C, Mann D A, Lembke C, et al. Mapping the Soundscape Off the Southeastern USA by Using Passive Acoustic Glider Technology[J]. Marine & Coastal Fish- eries, 2017, 9(1): 23-37.
[121] Liu L, Xiao L, Lan S Q, et al. Using Petrel II Glider to Analyze Underwater Noise Spectrogram in the South China Sea[J]. Acoustics Australia, 2018(2): 1-8.
[122] Wolk F, Lueck R G, Laurent L S. Turbulence Measurements from a Glider[C]//Oceans 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges. Biloxi: IEEE, 2009.
[123] Rudnick D L, Johnston T M S, Sherman J T. HighFrequency Internal Waves Near the Luzon Strait Observed by Underwater Gliders[J]. Journal of Geophysical Resear- ch Oceans, 2013, 118(2): 774-784.
[124] Schultze L K P, Merckelbach L M, Carpenter J R. Turbulence and Mixing in a Shallow Shelf Sea From Underwater Gliders[J]. Journal of Geophysical Research Oceans, 2017, 122(11): 9092-9109.
[125] Meyer D. Glider Technology for Ocean Observations: A Review[J]. Ocean Science Discussions, 2016: 1-26(2016-07-01) [2018-03-28]. https://doi.org/10.5194/os-2016-40,2016.
[126] Smith R N, Schwager M, Smith S L, et al. Persistent Ocean Monitoring with Underwater Gliders: Adapting Sampling Resolution[J]. Journal of Field Robotics, 2011, 28(5): 714-741.
[127] Testor P, Mortier L, Karstensen J, et al. EGO: Towards a Global Glider Infrastructure for the Benefit of Marine Research and Operational Oceanography[J]. Mercator Ocean-Coriolis Quarterly Newsletter, 2012(45):12-15.
[128] Arima M, Ichihashi N, Ikebuchi T. Motion Characteristics of an Underwater Glider with Independently Controllable Main Wings[C]//Oceans 2008-MTS/IEEE Kobe Techno-Ocean. Kobe: IEEE, 2008: 1-7.
[129] Arima M, Sumino W, Toyoda A, et al. 4 Feasibility Study of an Underwater Glider with Independently Controllable Main Wings(1st report): Development of an Experimental Underwater Glider[J]. Journal of the Japan Society of Naval Architects and Ocean Engineers, 2006(4): 31-37.
[130] Angilella A J, Gandhi F, Lear M. Wing Camber Variation of an Autonomous Underwater Glider[C]//Kissimmee: Aiaa/ahs Adaptive Structures Conference, 2018.
[131] 周驥平, 武立新, 朱興龍. 仿生撲翼飛行器的研究現狀及關鍵技術[J]. 機器人技術與應用, 2004(6): 12-17.
[132] Yang Z, Wang Y, Wu Z, et al. Mechanism Design of Controllable Wings for Autonomous Underwater Gliders[C]// Oceans 2014-Taipei. Taipei: IEEE, 2014: 1-5.
[133] 王田苗, 楊興幫, 梁建宏. 中央鰭/對鰭推進模式的仿生自主水下機器人發展現狀綜述[J]. 機器人, 2013, 35 (3): 352-362.
Wang Tian-miao, Yang Xing-bang, Liang Jian-hong. A Survey on Bionic Autonomous Underwater Vehicles Propelled by Median and/or Paired Fin Mode[J]. Robot, 2013, 35(3): 352-362.
[134] 朱崎峰, 宋保維, 丁浩, 等. 一種仿海龜撲翼推進機構設計[J]. 機械設計, 2011, 28(5): 30-33.
Zhu Qi-feng, Song Bao-wei, Ding Hao, et al. Design of a New Propulsion Mechanism of Imitation Turtles Flapping-Wing[J]. Journal of Machine Design, 2011, 28(5): 30-33.
[135] Wu Z, Yu J, Yuan J, et al. Mechatronic Design and Implementation of a Novel Gliding Robotic Dolphin[C]// Robotics and Biomimetics(ROBIO), 2015 IEEE International Conference. Zhuhai: IEEE, 2015: 267-272.
[136] Li K, Yu J, Wu Z, et al. Hydrodynamic Analysis of a Gliding Robotic Dolphin Based on Computational Fluid Dynamics[C]//Control Conference(CCC), 2016 35th Chinese. Chengdu: IEEE, 2016: 6008-6013.
[137] Wu Z, Yu J, Yuan J, et al. Analysis and Verification of a Miniature Dolphin-like Underwater Glider[J]. Industrial Robot, 2016, 43(6): 628-635.
[138] 馬崢, 李永成, 潘定一, 等. 水下滑翔機仿生推進水動力學特性研究[C]//第十四屆全國水動力學學術會議暨第二十八屆全國水動力學研討會文集(上冊). 長春: 全國水動力學研討會, 2017.
[139] ???; Mo, Kang Gil; ???, et al. The Fourth Industrial Revolution and Marine Technology[J]. Innovation studies, 2017, 12(2): 203-222.
[140] 劉欣. 基于智能感知的機器人交互技術研究[D]. 廣州:華南理工大學, 2016.
[141] Ma W, Zhang X, Yin G. Design on Intelligent Perception System for lower limb rehabilitation exoskeleton robot[C]//Ubiquitous Robots and Ambient Intelligence (URAI), 2016 13th International Conference. Xi’an: IEEE, 2016: 587-592.
(責任編輯: 陳 曦)
Development of Underwater Gliders:An Overview and Prospect
SHEN Xin-rui1,2, WANG Yan-hui1,2*, YANG Shao-qiong1,2, LIANG Yan1,2, LI Hao-zhang1,2
(1. School of Mechanical Engineering, Tianjin University, Tianjin 300350, China; 2. The Joint Laboratory of Ocean Observing and Detection, Qingdao National Laboratory for Marine Science and Technology, Qingdao 266237, China)
As a kind of special autonomous undersea vehicle, the underwater glider(UG) dives along a saw-tooth trajectory by adjusting the buoyancy and maintains its gliding mode by making use of hydrodynamic force. It can realize continuous observation and detection in long range and large scale in the complex ocean environment. Therefore, UG plays an increasingly important role in the novel global ocean observation and detection systems. In this paper, the recent development status of underwater glider technology both at home and abroad is reviewed with emphases on the research progress of the single UG platforms and the corresponding core techniques. And the studies on UG’s dynamics and control are summarized. Moreover, according to the representative research achievements in the world, this paper gives an overview of the UG-networked observation technology, and elaborates the design, development and application of the compact low-power sensor used in UGs, as well as the development in data format and protocol of UG. In addition, development prospect of UG technology is presented concerning promotion of power consumption optimization, communication and intelligent level of UGs.
underwater glider(UG); networking observation technology; sensor design; data format and protocol; intellisense
TJ630; TP242
A
2096-3920(2018)02-0089-18
10.11993/j.issn.2096-3920.2018.02.001
沈新蕊, 王延輝, 楊紹瓊, 等. 水下滑翔機技術發展現狀與展望[J]. 水下無人系統學報, 2018, 26(2): 89-106.
2018-03-28;
2018-04-30.
國家重點研發計劃(2016YFC0301100, 2017YFC0305902); 國家自然科學基金優秀青年科學基金(51722508)、面上項目(51475319); 山東省重點研發計劃(2016CYJS02A02); 青島海洋科學與技術國家實驗室問海計劃(ZR2016WH03)、主任基金(QNLM201705)和“鰲山人才”培養計劃(2017ASTCP-OS05, 2017ASTCP-OE01)等項目資助.
王延輝(1979-), 男, 博士, 教授, 主要研究方向為水下航行器研制及其海試應用.
