大型模鍛壓機(jī)主/被動(dòng)同步系統(tǒng)建模及動(dòng)態(tài)性能研究
2018-05-14 13:44:15范彬熊志宏陳昶殷赳曾珍珍
科技風(fēng) 2018年5期
范彬 熊志宏 陳昶 殷赳 曾珍珍
摘 要:本文采用解析法建立大型模鍛壓機(jī)驅(qū)動(dòng)系統(tǒng)的仿真模型,重點(diǎn)分析了泄漏系數(shù)、粘性阻尼系數(shù)、油液體積彈性模量等因素對(duì)驅(qū)動(dòng)系統(tǒng)低速穩(wěn)定性的影響,得出這些參數(shù)影響規(guī)律,最終就這些規(guī)律提出了一些可行的措施,以提高大型等溫模鍛壓機(jī)系統(tǒng)的低速穩(wěn)定性。
關(guān)鍵詞:驅(qū)動(dòng)系統(tǒng);建模;動(dòng)態(tài)特性
現(xiàn)代工業(yè)的迅猛發(fā)展,使得大型模鍛液壓機(jī)在空天運(yùn)載、船舶動(dòng)力、石油化工等行業(yè)發(fā)揮的作用愈發(fā)重要[1]。因此不僅需要建造的更多高性能大型模鍛壓機(jī),也需要對(duì)現(xiàn)有已投入生產(chǎn)的大型模鍛壓機(jī)進(jìn)行分析以進(jìn)一步提高工作能力。同步系統(tǒng)作為大型模鍛壓機(jī)不可或缺的組成部分,在壓機(jī)正常工作過(guò)程中起著無(wú)可替代的作用[2],因此對(duì)同步系統(tǒng)進(jìn)行分析顯得非常必要。
一、系統(tǒng)建模
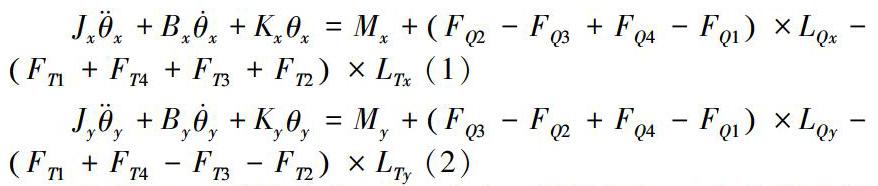
圖 1 所示,以模鍛壓機(jī)的活動(dòng)橫梁為研究對(duì)象,其中活動(dòng)橫梁偏轉(zhuǎn)時(shí)其所在的平面和 X 軸之間的夾角為θx,與 Y 軸的夾角為 θy。
利用剛體動(dòng)力學(xué)可得橫梁力矩平衡方程:
二、仿真分析
取主/被動(dòng)系統(tǒng)參數(shù)均為Bz=7×105,KQ=7×107,Ct=5.7×10-11,βe=1×109,利用matlab仿真軟件進(jìn)行仿真,得圖1、圖/2,
由圖2和圖3可以看出,被動(dòng)系統(tǒng)的最大偏轉(zhuǎn)角為-8.7e-4rad,(由于糾偏力矩定義的方向與θ1、θ2定義的正方向是相反的,所以圖中出現(xiàn)的偏轉(zhuǎn)角均為負(fù)值,僅代表方向。)達(dá)到時(shí)間為0.3s,偏轉(zhuǎn)角速度最大為-0.0122rad/s;由圖3和圖3可以看出,主動(dòng)同步系統(tǒng)的最大偏轉(zhuǎn)角為-1.28×10-3rad,到達(dá)時(shí)間為1s,最大偏轉(zhuǎn)速度為-0.01rad/s。對(duì)比圖2圖3可以發(fā)現(xiàn),系統(tǒng)參數(shù)相同情況下,被動(dòng)系統(tǒng)的最大偏轉(zhuǎn)比主動(dòng)的略小,但是響應(yīng)速度快70%,能夠快速到達(dá)最大偏轉(zhuǎn)程度,而主動(dòng)同步則反應(yīng)較慢。并且偏轉(zhuǎn)過(guò)程中,被動(dòng)同步系統(tǒng)的角速度曲線比主動(dòng)的平滑,說(shuō)明被動(dòng)系統(tǒng)的速度波動(dòng)性較小,運(yùn)行較平穩(wěn),快速。
三、結(jié)語(yǔ)
系數(shù)相同的情況下,被動(dòng)系統(tǒng)的糾偏能力稍弱,但是響應(yīng)速度較快,同時(shí)由于被動(dòng)系統(tǒng)設(shè)置的獨(dú)立性,不會(huì)損失系統(tǒng)的驅(qū)動(dòng)壓力。主動(dòng)系統(tǒng)糾偏能力較強(qiáng),但是反應(yīng)速度較慢,并且可能會(huì)損失驅(qū)動(dòng)壓力。當(dāng)偏載不大且變化速度緩慢時(shí),主/被動(dòng)同步系統(tǒng)均能應(yīng)用。但是對(duì)大偏載,且速度變化大的場(chǎng)合,主動(dòng)系統(tǒng)不如被動(dòng)系統(tǒng)。
參考文獻(xiàn):
[1]劉振堂.我國(guó)鍛壓機(jī)械行業(yè)現(xiàn)狀概況[J].鍛壓裝備與制造技術(shù),2011,(4):9-15.
[2]劉新良,黃明輝,湛利華,等.液壓機(jī)多缸同步系統(tǒng)的建模與解耦控制[J].機(jī)械設(shè)計(jì)與制造,2010,(11):8-10.
作者簡(jiǎn)介:范彬(1979-),男,湖南益陽(yáng)人,碩士,講師,研究方向:機(jī)械工程。
