基于三角基線性擬合算法的后視鏡外形優(yōu)化①
2018-05-17 06:47:43董佳康段金英
計算機系統(tǒng)應用 2018年5期
董佳康,段金英,李 楠,蘇 鵬
(西京學院,西安 710123)
隨著人們生活水平的提高,汽車得到了越來越多的普及.車輛增多引發(fā)的車禍事故驅(qū)使消費者對汽車的安全性越來越重視,后視鏡作為提供車輛視野安全的主要安全工具就顯的尤為重要,后視鏡使駕駛員在駕駛中能夠觀察汽車兩側以及后方的交通狀況,是保障行車安全必不可少的裝置.一般來說,汽車的后視鏡需要有良好的視野范圍,以便駕駛員能夠全面地了解車后方的道路情況.同時,后視鏡也要使圖像的畸變盡可能小,以使駕駛員能夠準確地判斷距離.正常的駕駛員在僅轉動眼球而不回頭的情況下,約可以看到前方200°左右的范圍,換句話說,還有 160°是看不見的.雖然普通的左右后視鏡加中央后視鏡,還可以提供約60°左右的可視范圍,然而剩下的那些死角盲區(qū)卻成為了大多數(shù)車禍發(fā)生的直接因素.當前市場上有很多不同規(guī)格的后視鏡,它們各有優(yōu)缺點.如何建立相關的數(shù)學模型,對外后視鏡的鏡面曲面外形和分界示意線的位置進行優(yōu)化,使其兼顧平面鏡和凸透鏡的優(yōu)點,是當前需要解決的主要問題.本文通過Matlab計算與仿真后得知當曲率為 1151 mm 時,可視角度為 80°,可視區(qū)域變大且圖像清晰度較高.根據(jù)幾何光學公式得知當分界線的位置處于后視鏡外側約1/3處時駕駛員能獲得滿意的視野.
1 后視鏡分析
1.1 曲面鏡外形
通過模型的建立,主要完成對鏡面的曲面外形以及分界示意線的位置的優(yōu)化.由于雙曲面鏡有鏡面組合出現(xiàn)變形和平面鏡向變曲面鏡過渡時造成眩暈的缺點,所以優(yōu)化鏡面曲面外形時需要考慮以下因素[1]:
(1) 如何通過簡單、便利、低成本的方式緩解眩暈.
(2) 如何改變凸透鏡曲率半徑的大小,實現(xiàn)平面鏡與凸面鏡的平滑過渡,同時降低失真率.
1.2 分界示意線的位置要求
為了保證外后視鏡能夠擴大可視角,減小盲區(qū),在確立分界線的位置時,需考慮以下因素[2]:
(1) 左后視鏡安全區(qū)域: 至少看到向左寬 2500 mm區(qū)域,并從駕駛員眼點后 10 000 mm外延伸至地面;
(2) 右后視鏡安全區(qū)域: 至少看到向右寬 4000 mm區(qū)域,并從駕駛員眼點后 20 000 mm外延伸至地面;
由于后視鏡外側凸透鏡(副視野區(qū)域)存在部分失真,所以設計時應該保證凸透鏡與平面鏡分界處以內(nèi)(即平面鏡主視野區(qū)域)滿足上述安全視野區(qū)域,以能夠?qū)崿F(xiàn)視野觀察和距離判斷[3],保證駕車安全.
2 基于三角基線性擬合算法模型的建立與求解
2.1 后視鏡曲面外形
1) 盲區(qū)的產(chǎn)生
假設人體模型為H,測量內(nèi)后視鏡的后視野時[4],眼相對人的坐標:

測量外后視鏡的后視野時,眼相對人的坐標:

式(1)、(2)中 α為座椅靠背角.
2) 后視鏡視角的計算
駕駛盲區(qū)示意圖如圖1所示.駕駛根據(jù)反射定理,可以得知視角表達式[5]:

式(3)中為曲面鏡的曲率半徑,為鏡面寬,為像與鏡的距離,即:

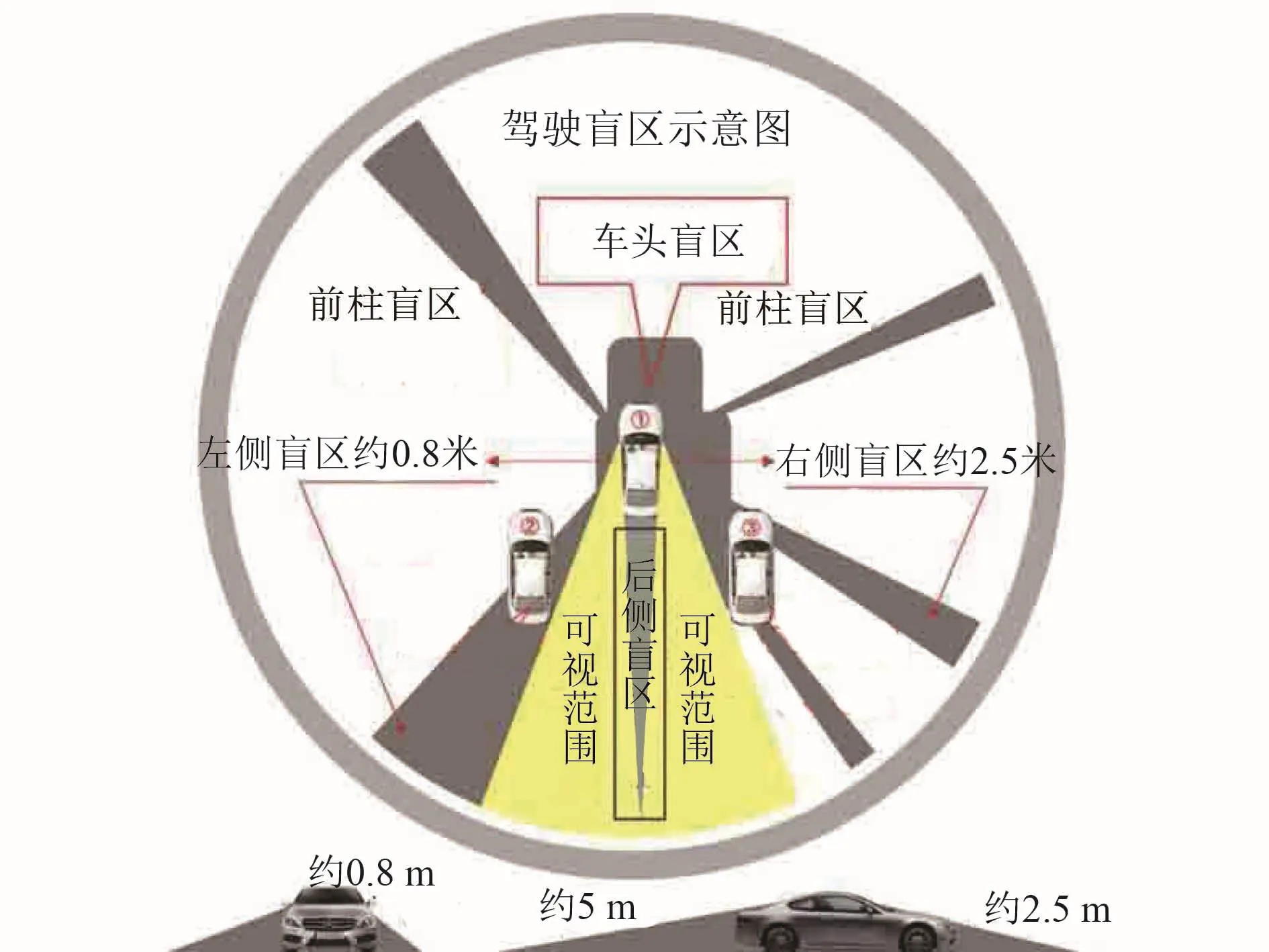
圖1 駕駛盲區(qū)示意圖
鏡面寬度取不同值時,眼睛到后視鏡的距離計算結果如表1所示.雙目視角的計算結果如表2所示.

表1 眼睛到后視鏡距離
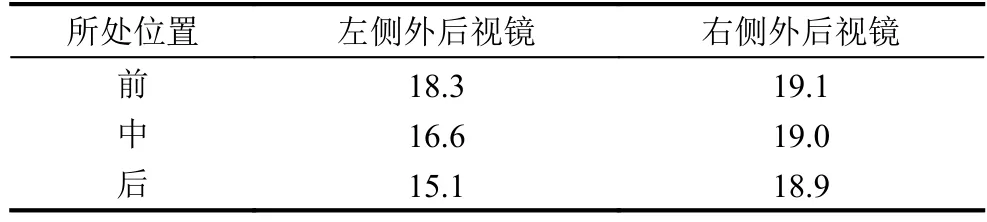
表2 雙目視角
3) 模型的建立
使用三角基線性擬合方法建立一種新的曲面擬合方法[6],即三角基最佳逼近方法,與最小二乘法相比,三角基線性擬合法有兩個較大的改進.
① 建立的擬合函數(shù)由系數(shù)向量構成,系數(shù)向量是空間坐標的函數(shù),從而使擬合函數(shù)在不同位置有不同的形式,精度更高.
② 對大量的離散數(shù)據(jù),不需要進行分塊擬合和平滑化,某點處的數(shù)值只受影響區(qū)域內(nèi)節(jié)點影響,影響區(qū)域外的節(jié)點對數(shù)值沒有影響,因而具有緊支性.
4) 模型的求解
實際測量后視鏡,測量區(qū)域為:


i和的取值范圍為
根據(jù)三角基線擬合法,對二次曲面進行網(wǎng)格化,得到網(wǎng)點的模型為:

式 (8)中ai,bj為系數(shù),i,j=0,1,2,3.
實際計算時為防止溢出分別為:

式中此時擬合多項式為:

為驗證本文方法的有效性,對某后視鏡進行了擬合.網(wǎng)格化得測量區(qū)域選為:

在其測量區(qū)域上選取個點,則得到后視鏡的擬合方程為:

在擬合曲面上通過數(shù)值實驗的辦法確定主視野區(qū),使從眼點出發(fā)的光線通過主視野區(qū)鏡面反射后,在測試屏上能照射到國標規(guī)定的區(qū)域[7].
以主視野區(qū)曲面的邊界為邊界約束,用運自適應普適無網(wǎng)絡格法解特征方程:

式 (12)中,r≥500.
可得副視野區(qū)的曲面方程,它和主視野區(qū)的曲面是分片光滑的連續(xù)曲面(在連續(xù)接線處連續(xù)但無連續(xù)偏導數(shù)).
5) 曲率半徑的計算
R用mm表示,計算公式如式(13)、(14)所示.
式中分別為第一,第二,第三,第四測點的曲率半徑.
選取P1–P88 個測試點,測試結果如表3 所示.計算出8個點處的曲率半徑如表4所示.

表3 測試結果數(shù)據(jù)顯示
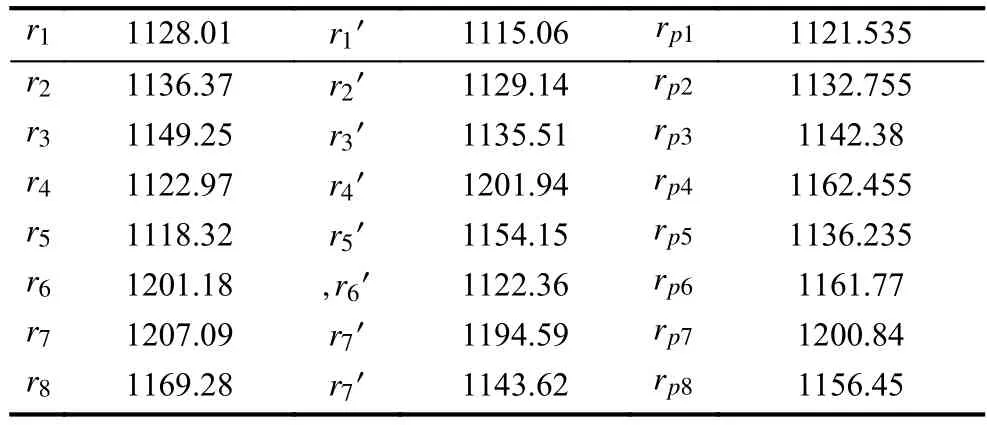
表4 8 個點處的曲率半徑
在第一測點的曲率半徑:

在第二測點的曲率半徑:

在第三測點的曲率半徑:

在第四測點的曲率半徑:

最終得到這種后視鏡的曲率半徑:

所 以 :是滿足條件的.
在主視野區(qū)域在安全視野的條件下,通過減小副視野區(qū)鏡面的曲率半徑,從而使得可視角度增大.通過Matlab計算與仿真后得知當曲率為1151 mm時,可視角度為80°,可視區(qū)域變大且圖像清晰度較高,使用前和使用后廣角范圍對比如圖2所示.

圖2 廣角范圍
2.2 分界示意線
針對四種曲率半徑不同的后視鏡分成像清晰,一般可選取實用的最佳角因此,在已知物體的映像高度和相距的條件下[8],從視點到鏡面的最佳距離為:

由式(20)可知,當物體的高度和物距一定時,鏡面的曲率半徑越小,映像的高度也就越小,為了看清映像,就要相應地減小的值.因此,曲率半徑小的后視鏡,應距駕駛員近些; 對于安裝在汽車翼子板上的后視鏡,應選取較大的曲率半徑.
根據(jù)光在凸透鏡上折射和反射的原理,以及光經(jīng)過凸面鏡反射后空間成像的原理,可由方程組(21)計算后視鏡曲率半徑.

確定鏡面長度時,應考慮車體高度和鏡面到后輪胎前緣的距離,這主要因為后輪是肇事的危險區(qū),因此必須清晰可見.后輪到鏡面的距離一般為3~7米[9],如果此處的景物在鏡面里可以完全看到,再考慮車體的高度,整個鏡面里就能得到30米處景物的映像.在選定鏡面得曲率半徑R之后,可利用幾何光學原理求出鏡面的長度.
在確定鏡面的寬度時,也可以利用式(22)計算.此時的由視野的寬度決定,由垂直視野的長度確定.
根據(jù)成像原理來確定和、的關系,其相應的幾何光學公式為:

式(23)中:表示為物距,表示為相距,表示為焦距,表示為目距.
設為視角,則為:

對曲率半徑R=1151 mm的凸面鏡的數(shù)據(jù)測試結果如表5 所示.另外,根據(jù)鏡面的面積進行逆運算,求出能夠滿足視野要求的分界線位置.也就是說,鏡面分界線的位置一定要與它的曲率半徑保持一定比例的匹配關系[10].由于駕駛員的身材、坐姿及駕駛習慣存在差異,為保證駕駛員能獲得滿意的視野,將分界線的位置處于后視鏡外側約1/3處是最優(yōu)比例,此比例下呈現(xiàn)的映像稍小.
3 仿真結果
采用三角基線性擬合法對后視鏡仿真曲面擬合后,結果如圖3所示,可以看到擬合之后后視鏡圖形擬合曲面的峰谷的個數(shù)不隨節(jié)點值變化,凹凸性相對穩(wěn)定,比用最小二乘法擬合的曲面相對平滑.針對后視鏡的缺陷,分別取 5 m 到 10 m 的客車,10 m 到 15 m,15 m到20 m的3種類型客車,根據(jù)幾何光學公式對鏡面的面積進行逆運算,可以求知不同的車型的合適鏡片尺寸.然后對后視鏡建立曲面擬合模型,通過三角基線性擬合算法對復雜的曲面進行擬合,在副視野區(qū)域圖像的失真率不大于且主視野區(qū)域在安全視野的條件下,通過減小副視野區(qū)鏡面的曲率半徑,從而使得可視角度增大,進而實現(xiàn)后視鏡的曲面外形優(yōu)化.

表5 曲率半徑 R=1151 mm 時的測量數(shù)據(jù)

圖3 三角基線性 matlab 擬合結果
4 結束語
本文根據(jù)幾何光學公式對鏡面的面積進行逆運算,可以求知不同的車型的合適鏡片尺寸.然后對后視鏡建立曲面擬合模型,通過三角基線性擬合算法對復雜的曲面進行擬合,在副視野區(qū)域圖像的失真率不大于且主視野區(qū)域在安全視野的條件下,通過減小副視野區(qū)鏡面的曲率半徑,從而使得可視角度增大.進而實現(xiàn)后視鏡的曲面外形優(yōu)化.
本文所建立的模型,使用范圍相對較廣,曲面擬合法可以解決很多實際的工程問題,比如采用曲面擬合法來檢測高溫區(qū)域的邊緣,根據(jù)獲取的目標表面溫度圖像,進行高溫域檢測.曲面擬合法可克服插值法的不足之處,近似地求出變量與目標函數(shù)關系,用于設備在線檢測及故障診斷中的應用則集中于傳感器、信息融合技術等方面的分析.
參考文獻
1曹競輝,孫貴斌,王耀,等.汽車后視鏡盲區(qū)的解決方案及控制策略.機電技術,2016,(4): 80–82.
2周博.汽車外后視鏡鏡片尺寸及位置設計.上海汽車,2015,(12): 41–44.
3牛慧超,王衛(wèi)華,白潔.汽車后視鏡視野檢測的智能仿真算法.地理與地理信息科學,2009,25(6): 110–111.
4李莉莉.汽車后視鏡曲率半徑測控系統(tǒng)的設計與實現(xiàn)[碩士學位論文].武漢: 武漢理工大學,2014.
5李海燕,譚光宇,李海寶,等.基于逆向工程的汽車后視鏡再設計研究.機床與液壓,2009,37(6): 29–31.
6王衛(wèi)華,李昆.曲面擬合技術在汽車后視鏡理論建模中的應用.武漢理工大學學報,2005,27(11): 106–109.[doi:10.3321/j.issn:1671-4431.2005.11.032]
7熊玉潔.后視鏡布置與設計.輕型汽車技術,2004,(11):8–12.
8陳浩,馬艷,郝亮,等.汽車駕駛員視野拓展系統(tǒng)的設計與實現(xiàn).汽車工程師,2016,(6): 19–23.
9歐春烴.汽車后視鏡穩(wěn)健設計及有限元分析[碩士學位論文].重慶: 重慶大學,2016.
10許曉杰,潘秋菱,王昌銀,等.汽車后視鏡反射率測量系統(tǒng)的研究.光電子?激光,2005,16(5): 634–636.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
作文大王·低年級(2016年4期)2016-04-18 00:24:37
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
決策探索(2014年21期)2014-11-25 12:29:50
民生周刊(2012年10期)2012-10-14 09:06:46