混合動力汽車智能能量管理策略的分層與自適應神經模糊控制
2018-05-21 03:41:32
汽車文摘 2018年5期
本文研究一款由Safra公司開發的混動客車,其動力總成包括電機、液壓馬達、內燃機和電池,結構如圖1。該車有5種工作模式,模式1:電機單獨驅動;模式2:內燃機帶動液壓馬達驅動;模式3:電機和液壓馬達混合驅動;模式4:內燃機為電池充電;模式5:制動能量回收。
為了在軟件層面進行仿真分析,首先建立動力學模型,其次建立了駕駛員模型,來對加速和制動踏板信息進行解析,準確傳達駕駛員命令。隨后搭建了整車控制器模型,采用分層控制思想,將控制策略分為三個階段:階段1通過模糊控制來確定此時車輛的工作模式;階段2通過對動力進行合理分配來使整車效率最大化;階段3進一步確定各動力源的工作點或工作范圍。
在階段1中,分別將扭矩需求、電池SOC(剩余電量狀態)和車速三個參數進行模糊化,并設計一個模糊控制器,根據車輛實時的信息反饋來確定當時車輛的運行模式。在階段2中結合上一階段得到的工作模式,根據新的模糊控制規則,得到電機和發動機的輸出轉矩,實現對動力的實時分配(圖2、圖3)。階段3利用PID模糊控制算法來分別對電機的工作轉速范圍和發動機的工作點進行自適應選取,在滿足性能要求的基礎上最大化地提高整車效率。該策略具有如下優點:(1)無需提前預知行駛工況;(2)能夠在5種工作模式間實時切換;(3)發動機能夠工作在經濟高效區。

圖1 動力總成結構

圖2 IHHCS分布式再生系統
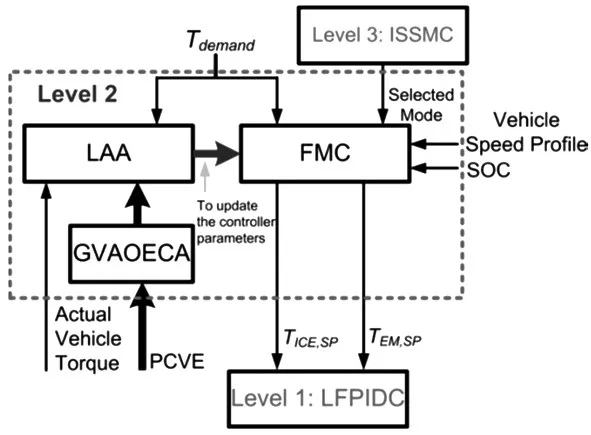
圖3 Level 2原理圖
最后通過仿真發現,相較于傳統策略,本文的控制策略能夠在整個循環工況下,實現電池SOC提升3%,整車的能量消耗減低30%,具有很好的節能效果。