開關(guān)磁阻電機(jī)和路面對(duì)電動(dòng)汽車振動(dòng)影響的分析?
2018-05-22 09:43:54王培德
汽車工程 2018年4期
關(guān)鍵詞:振動(dòng)
李 杰,高 雄,王培德
(吉林大學(xué),汽車仿真與控制國家重點(diǎn)實(shí)驗(yàn)室,長春 130025)
前言
近年來,能源和環(huán)保帶來的雙重壓力,使電動(dòng)汽車成為汽車工業(yè)研發(fā)的焦點(diǎn)。作為電動(dòng)汽車的一種形式,輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車將驅(qū)動(dòng)電機(jī)嵌入到輪轂內(nèi),是布置結(jié)構(gòu)最簡單和傳動(dòng)效率最高的電動(dòng)汽車,受到廣泛關(guān)注[1-6]。
開關(guān)磁阻電機(jī)是20世紀(jì)80年代遵循磁阻最小原理發(fā)展起來的一種新型電機(jī),具有結(jié)構(gòu)簡單、成本低、啟動(dòng)性好、效率高、調(diào)速范圍寬等優(yōu)點(diǎn),十分適合在電動(dòng)汽車上應(yīng)用。然而,開關(guān)磁阻電機(jī)缺點(diǎn)是轉(zhuǎn)矩波動(dòng)引起的振動(dòng)和噪聲較大[7-9]。
當(dāng)開關(guān)磁阻電機(jī)嵌入到輪轂內(nèi),電機(jī)產(chǎn)生的激勵(lì)將時(shí)刻作用在車輪上,直接影響電動(dòng)汽車的舒適性和安全性。因此,研究開關(guān)磁阻電機(jī)的激勵(lì),是促進(jìn)其在電動(dòng)汽車上廣泛應(yīng)用的關(guān)鍵問題之一。
以往研究多從電機(jī)設(shè)計(jì)及其控制方面考慮開關(guān)磁阻電機(jī)振動(dòng)問題,僅有少量研究從電機(jī)應(yīng)用環(huán)境考慮開關(guān)磁阻電機(jī)振動(dòng)問題。為抑制開關(guān)磁阻電機(jī)缺點(diǎn),充分發(fā)揮其優(yōu)點(diǎn),已經(jīng)針對(duì)開關(guān)磁阻電機(jī)開展了激勵(lì)分析和對(duì)輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)影響的研究[10-12],這些研究是對(duì)開關(guān)磁阻電機(jī)在汽車應(yīng)用環(huán)境的嘗試,具有基礎(chǔ)性。但是,這些研究對(duì)電機(jī)激勵(lì)的分析過于復(fù)雜,不便于應(yīng)用;僅考慮電機(jī)單相轉(zhuǎn)子多相過程的電機(jī)激勵(lì),沒有考慮電機(jī)多相轉(zhuǎn)子多相過程的實(shí)際過程,存在問題;僅考慮靜止不動(dòng)時(shí)電機(jī)對(duì)汽車振動(dòng)的影響,沒有考慮行駛時(shí)電機(jī)和路面作為雙激勵(lì)對(duì)汽車振動(dòng)的影響,具有局限性。
為了克服上述問題,在前人的研究工作基礎(chǔ)上,采用線性假設(shè)以易于理解與應(yīng)用的方式描述開關(guān)磁阻電機(jī)激勵(lì),通過濾波白噪聲描述路面激勵(lì),基于1/4汽車2自由度系統(tǒng)建立輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)模型,確定對(duì)應(yīng)的振動(dòng)性能指標(biāo),以電機(jī)和路面作為雙激勵(lì)分析它們及其組合對(duì)汽車振動(dòng)的影響,為開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)性能的改善、優(yōu)化和控制研究奠定基礎(chǔ)。
1 開關(guān)磁阻電機(jī)激勵(lì)描述
1.1 電機(jī)組成和線性假設(shè)
開關(guān)磁阻電機(jī)由轉(zhuǎn)子、定子、繞組和開關(guān)電路部分組成。
典型四相8/6極開關(guān)磁阻電機(jī)的基本結(jié)構(gòu),如圖1所示,4組開關(guān)電路僅畫出1組。其中,定子外圓周均布8個(gè)凸極,每個(gè)凸極上安裝有繞組,構(gòu)成單極繞組,定子外圓周相對(duì)的兩個(gè)單極繞組串聯(lián),構(gòu)成單相繞組,又稱繞組線圈;轉(zhuǎn)子內(nèi)圓周均布6個(gè)凸極,每個(gè)凸極稱為單相轉(zhuǎn)子。
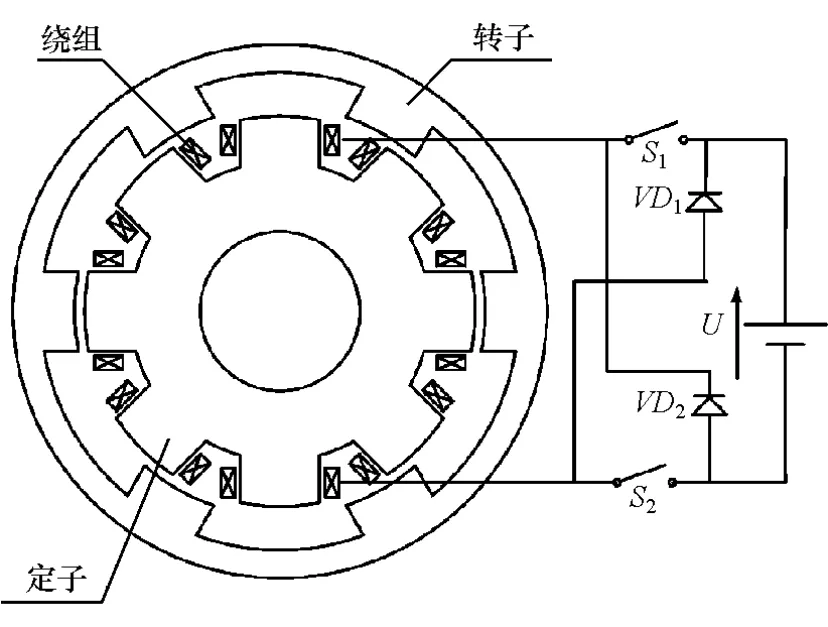
圖1 四相8/6極電機(jī)典型結(jié)構(gòu)
當(dāng)單相轉(zhuǎn)子在一定角度向單相繞組靠近時(shí),電流在繞組線圈通過,磁通沿著磁阻最小的路徑閉合,轉(zhuǎn)子與定子之間產(chǎn)生電磁作用過程,稱為單相轉(zhuǎn)子單相過程,簡稱單相過程;單相轉(zhuǎn)子與所有單相繞組電磁作用的過程,稱為單相轉(zhuǎn)子多相過程;所有單相轉(zhuǎn)子與所有單相繞組電磁作用的過程,稱為多相轉(zhuǎn)子多相過程,它是電機(jī)激勵(lì)形成的完整過程。
為描述開關(guān)磁阻電機(jī)的運(yùn)動(dòng)過程,引入如下線性假設(shè)[10-12]:
(1)忽略功率損耗、磁通邊緣效應(yīng)和磁路非線性;
(2)相變換瞬時(shí)完成;
(3)電機(jī)恒速運(yùn)行,電流為常數(shù)。
1.2 單相過程電機(jī)激勵(lì)與轉(zhuǎn)子轉(zhuǎn)角關(guān)系
單相過程中,電機(jī)完成一個(gè)轉(zhuǎn)子與一個(gè)定子的電磁作用過程,產(chǎn)生的電機(jī)激勵(lì)為單相轉(zhuǎn)子單相過程的切向力和徑向力。
在線性假設(shè)下,可以建立電機(jī)單相轉(zhuǎn)子單相過程切向力和徑向力的表示[10-12]。
切向力Fn(θ)和徑向力Fr(θ)分別為
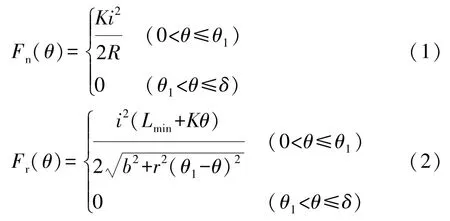
式中:θ為轉(zhuǎn)子轉(zhuǎn)角;K為電感上升斜率;i為恒定的額定電流;θ1為轉(zhuǎn)子與定子完全重疊位置;δ為單相過程作用范圍;Lmin為最小電感;R為轉(zhuǎn)子內(nèi)半徑;r為定子外半徑;b為轉(zhuǎn)子與定子間的最小氣隙。
1.3 單相過程電機(jī)激勵(lì)與時(shí)間的關(guān)系
采用轉(zhuǎn)子轉(zhuǎn)角作為自變量進(jìn)行后續(xù)分析,并不方便。為此,引入時(shí)間作為自變量。于是,單相過程的θ,θ1和δ對(duì)應(yīng)的時(shí)間分別為

式中:ω為電機(jī)旋轉(zhuǎn)速度。
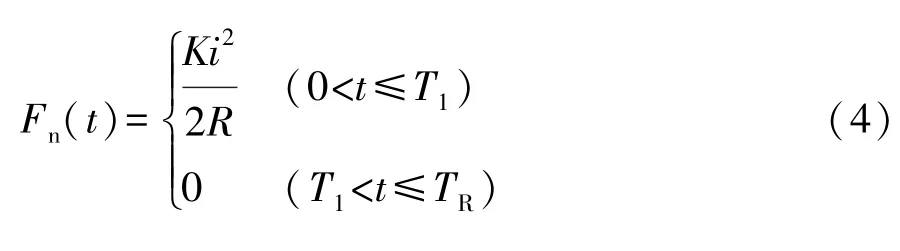
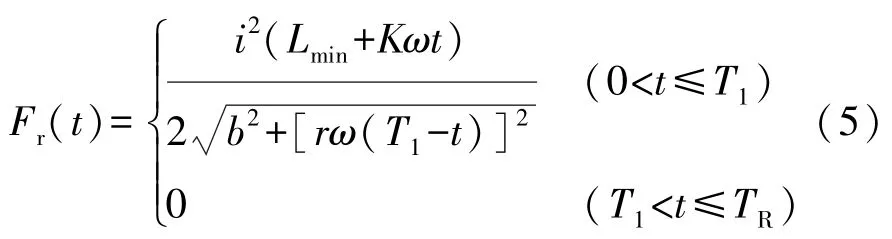
對(duì)應(yīng)式(3),單相過程電機(jī)激勵(lì)與時(shí)間的關(guān)系為
1.4 單相轉(zhuǎn)子多相過程電機(jī)激勵(lì)與時(shí)間的關(guān)系
引入時(shí)間作為自變量后,單相過程本質(zhì)上就是單相轉(zhuǎn)子在一個(gè)周期TR的運(yùn)行過程,而單相轉(zhuǎn)子多相過程,就是單轉(zhuǎn)子多個(gè)周期的運(yùn)行過程。
考慮周期后,單相轉(zhuǎn)子多相過程的電機(jī)激勵(lì)與時(shí)間的關(guān)系為

1.5 多相轉(zhuǎn)子多相過程電機(jī)激勵(lì)與時(shí)間的關(guān)系
為分析方便,設(shè)基準(zhǔn)為水平軸,將四相8/6極開關(guān)磁阻電機(jī)初始時(shí)刻靠近水平軸的定子單級(jí)繞組標(biāo)識(shí)為A極,按照逆時(shí)針方向?qū)⑵浜笕龢O繞組分別標(biāo)識(shí)為B,C和D極,與A,B,C和D極相對(duì)的單級(jí)繞組分別標(biāo)識(shí)為A′,B′,C′,D′極,如圖 2 所示。
設(shè)A極的初相位角為φA,則各級(jí)繞組的初相位角為φi,如表1所示。
初始時(shí)刻,設(shè)與A極作用的轉(zhuǎn)子為a相。按逆時(shí)針方向,其后兩相轉(zhuǎn)子分別為b和c相,與a,b,c相對(duì)的轉(zhuǎn)子分別為a′,b′,c′相。
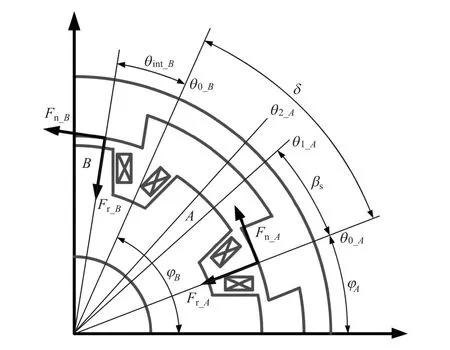
圖2 初始時(shí)刻的電機(jī)激勵(lì)(僅畫出電機(jī)的1/4)
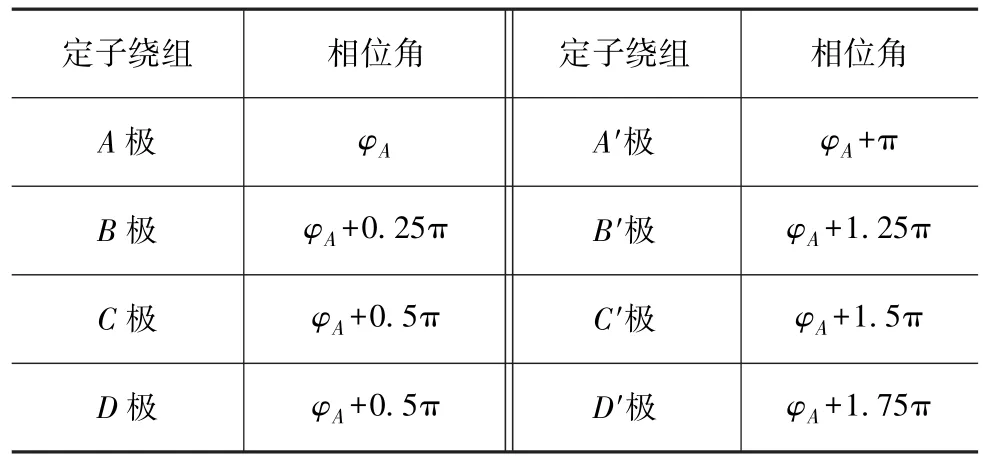
表1 四相8/6電機(jī)各級(jí)定子繞組的相位角
在確定各定子繞組對(duì)應(yīng)的初相位角后,需要確定各相轉(zhuǎn)子在初始時(shí)刻的位置θint。初始時(shí)刻,各相轉(zhuǎn)子的初始位置,如表2所示。
由于初始時(shí)刻不同轉(zhuǎn)子的初值位置θint不同,某一時(shí)刻各相轉(zhuǎn)子轉(zhuǎn)角θ=θint+ωt。因此,考慮定子單級(jí)繞組和轉(zhuǎn)子的初始位置后,垂向和水平的電機(jī)激勵(lì)表示為
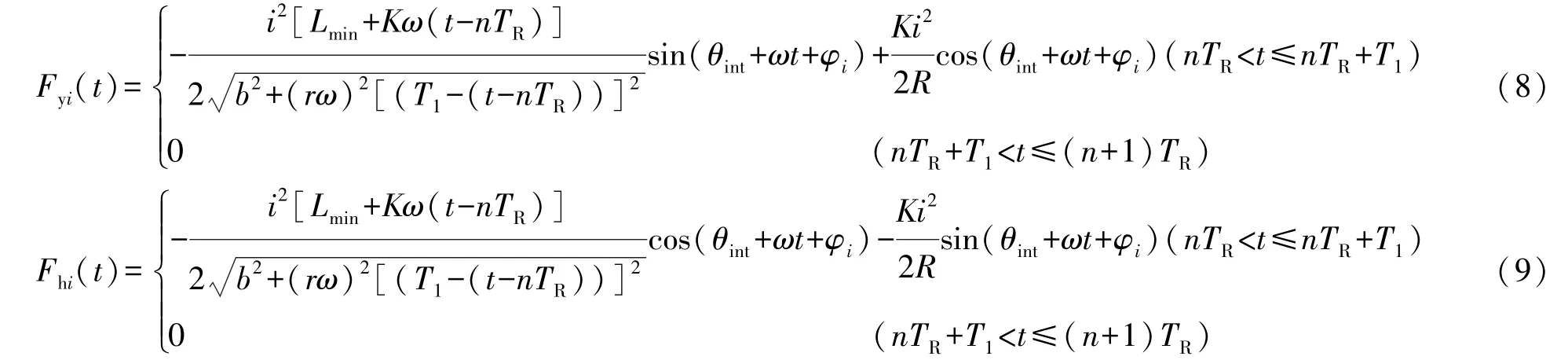
對(duì)整體電機(jī)而言,某一時(shí)刻垂向和水平的電機(jī)整體激勵(lì)表示為

1.6 理想和偏心情況轉(zhuǎn)子與定子間的最小氣隙
理想情況是指定子和轉(zhuǎn)子的圓心重合,不存在偏心的情況。
理想情況下,轉(zhuǎn)子與定子間的最小氣隙bi是恒定值,即

在實(shí)際中,由于加工、制造和裝配,轉(zhuǎn)子與定子之間會(huì)存在一定的偏心,即定子和轉(zhuǎn)子圓心不重合。
由于電機(jī)徑向力較大,且垂向偏心導(dǎo)致的徑向力不平衡力較大[13]。因此,為便于研究,選擇最小氣隙位置不變和垂向偏心的情況研究偏心對(duì)電機(jī)激勵(lì)的影響。
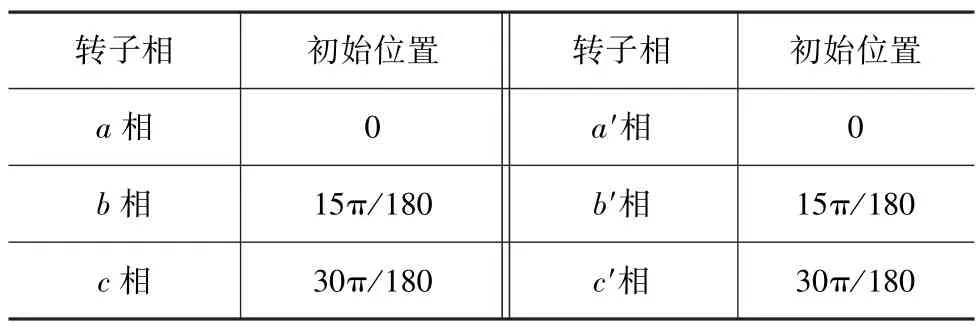
表2 四相8/6電機(jī)各相轉(zhuǎn)子初始位置
設(shè)偏心方向?yàn)榇瓜颍牧繛閑,經(jīng)推導(dǎo)偏心時(shí)最小氣隙b為
在式(13)中,如果讓e=0,則b=bic,由此說明式(13)可以用于表示理想和偏心兩種情況的最小氣隙。
將各極定子的初始位置代入上式,就可以得到四相8/6極開關(guān)磁阻電機(jī)各極定子與轉(zhuǎn)子間的最小氣隙。將考慮偏心后的各極繞組與轉(zhuǎn)子間最小氣隙代入式(8)~式(11)中,就得到電機(jī)整體激勵(lì)。
2 路面激勵(lì)的描述
2.1 路面激勵(lì)的功率譜密度表示
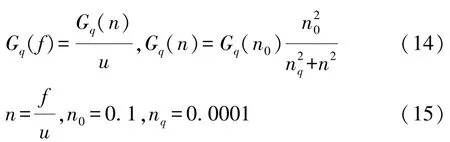
對(duì)于路面激勵(lì),基于路面功率譜密度的表示方法,考慮下截止頻率nq的路面激勵(lì)功率譜密度Gq(f)[14]為
式中:f為路面激勵(lì)的時(shí)間頻率;u為車速;n,n0分別為空間頻率和參考空間頻率;Gq(n0)為路面不平度系數(shù),由標(biāo)準(zhǔn)給定[15];nq為下截止空間頻率。
2.2 路面激勵(lì)的濾波白噪聲表示
濾波白噪聲方法是將理想單位白噪聲作為輸入,經(jīng)1階濾波器變化后轉(zhuǎn)化成路面激勵(lì)作為輸出的方法。
基于濾波白噪聲,式(14)對(duì)應(yīng)的路面激勵(lì)的時(shí)域描述為[16]

式中:q為路面激勵(lì);w(t)為均值是0和功率譜密度是1的理想單位白噪聲。
3 電動(dòng)汽車振動(dòng)模型
3.1 1/4汽車2自由度系統(tǒng)
1/4汽車2自由度系統(tǒng)是由簧載質(zhì)量(車身)與非簧載質(zhì)量(車輪)構(gòu)成的常用研究汽車振動(dòng)的模型[15]。
1/4汽車2自由度系統(tǒng)由質(zhì)量為m2的車身、質(zhì)量為m1的車輪、剛度為k的懸架、阻尼為c的減振器和剛度為kt的輪胎組成,z2為車身垂直位移,z1為車輪垂直位移,q為路面激勵(lì),F(xiàn)V為垂向的電機(jī)整體激勵(lì),如圖3所示。
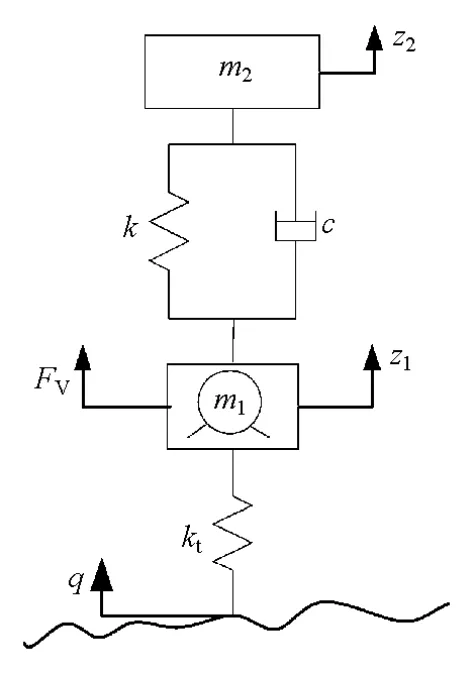
圖3 1/4汽車2自由度系統(tǒng)力學(xué)模型
描述1/4汽車2自由度系統(tǒng)的運(yùn)動(dòng)方程為
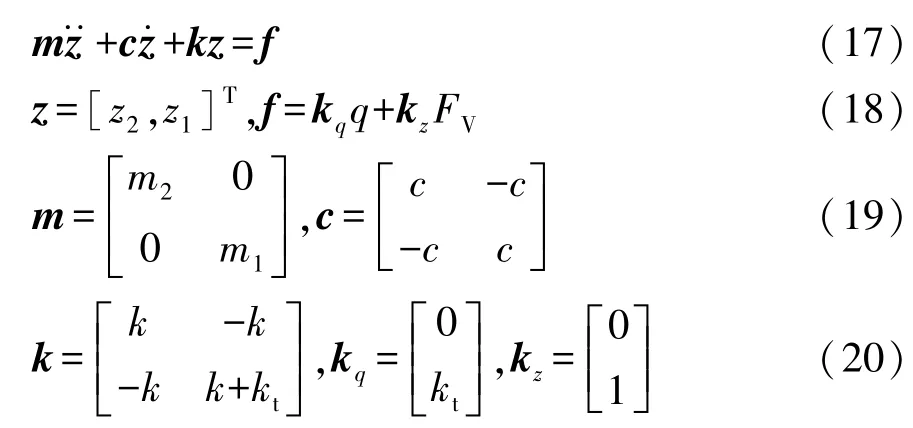
3.2 振動(dòng)性能指標(biāo)及其確定
1/4汽車2自由度系統(tǒng)的振動(dòng)響應(yīng)量,由車身加速度懸架動(dòng)撓度fd和車輪相對(duì)動(dòng)載Fd/G組成。
輪轂引入電機(jī)后,會(huì)對(duì)電機(jī)造成一定的影響。分析輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)性能時(shí),除了上述的3個(gè)振動(dòng)響應(yīng)量外,本文中補(bǔ)充車輪加速度作為振動(dòng)響應(yīng)量。
fd和Fd/G的表示為

由式(10)和式(16)確定電機(jī)激勵(lì)FV和路面激勵(lì)q,將其代入式(18)可以得到激勵(lì)向量f;對(duì)式(17)采用時(shí)域積分方法,可以得到各個(gè)時(shí)刻的位移z,速度和加速度由此可以得到車身加速度和車輪加速度再由式(21)和式(22)可以得到懸架動(dòng)撓度fd和車輪相對(duì)動(dòng)載Fd/G。
求得每個(gè)振動(dòng)響應(yīng)量后,采用每個(gè)量的均方根值作為振動(dòng)性能指標(biāo)。
4 電動(dòng)汽車振動(dòng)性能分析
4.1 分析方案
基于前面的理論分析,采用Matlab/Simulink開發(fā)了基于1/4汽車2自由度系統(tǒng)的開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)性能仿真軟件。
選擇采用四相8/6級(jí)開關(guān)磁阻電機(jī)的某電動(dòng)汽車作為研究對(duì)象,在轉(zhuǎn)子和定子沒有偏心的理想情況和垂向偏心率10%情況下對(duì)輪轂電機(jī)驅(qū)動(dòng)汽車振動(dòng)性能進(jìn)行仿真。
首先,對(duì)垂向電機(jī)整體激勵(lì)進(jìn)行仿真。然后,對(duì)電動(dòng)汽車振動(dòng)性能進(jìn)行仿真。仿真條件為B級(jí)路面,車速以5km/h的增量從5km/h變化到80km/h,再現(xiàn)城市的普通和高架道路行駛工況。
4.2 理想和垂向偏心情況下垂向電機(jī)整體激勵(lì)
車速為20km/h時(shí),轉(zhuǎn)子和定子無偏心的理想情況和垂向偏心率10%情況下的垂向電機(jī)整體激勵(lì),如圖4所示。

圖4 理想和偏心兩種情況的垂向整體電機(jī)激勵(lì)
由圖4可以看出,在理想情況下,垂向的電機(jī)整體激勵(lì)為零,說明電機(jī)的轉(zhuǎn)子和定子之間沒有偏心的理想情況電機(jī)不產(chǎn)生垂向整體激勵(lì),驗(yàn)證了電機(jī)激勵(lì)模型的正確性[13];在垂向偏心率為10%的情況下,垂向電機(jī)整體激勵(lì)呈周期性變化;由于電機(jī)切向力小于徑向力,同時(shí),由于電機(jī)垂向向上偏心,因此,垂向電機(jī)整體激勵(lì)方向始終為向下。
4.3 電機(jī)和路面激勵(lì)對(duì)振動(dòng)性能的影響
理想情況和偏心率10%情況下,輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)性能指標(biāo)的仿真結(jié)果,如圖5所示。
由圖5可以看出:
(1)電機(jī)激勵(lì)對(duì)電動(dòng)汽車車身加速度的影響主要體現(xiàn)在車速較低時(shí),當(dāng)車速高于30km/h后,電機(jī)激勵(lì)對(duì)車身加速度影響很小;在車速10km/h附近時(shí),電機(jī)激勵(lì)對(duì)車身加速度影響最大,相比于沒有電機(jī)激勵(lì)的情況,車身加速度增加了0.923 0m/s2;
(2)電機(jī)激勵(lì)對(duì)電動(dòng)汽車懸架動(dòng)撓度的影響主要在車速10km/h時(shí),由電機(jī)激勵(lì)引起的懸架動(dòng)撓度相比于沒有電機(jī)激勵(lì)的情況增加了2.483 6mm;
(3)電機(jī)激勵(lì)對(duì)輪胎動(dòng)載荷的影響十分明顯,尤其是當(dāng)車速較低時(shí),因?yàn)殡姍C(jī)激勵(lì)導(dǎo)致的輪胎動(dòng)載荷增加了708.5N;5~80km/h車速區(qū)間,電機(jī)激勵(lì)導(dǎo)致輪胎動(dòng)載荷增加量的平均值為312N;
(4)電機(jī)激勵(lì)對(duì)車輪加速度的影響十分明顯,除車速為10km/h時(shí)車輪加速度增加量達(dá)到19.774 3m/s2之外,在常用車速60km/h下,由電機(jī)激勵(lì)引起的車輪加速度相比于沒有電機(jī)激勵(lì)的情況,增加了10.345 3m/s2。
電機(jī)出現(xiàn)偏心情況,會(huì)產(chǎn)生振動(dòng)性能評(píng)價(jià)指標(biāo)惡化的問題。通過車輛設(shè)計(jì)或電機(jī)設(shè)計(jì)的改變,可以減小該問題。選擇從車輛設(shè)計(jì)改變處理這一問題,基于對(duì)懸架參數(shù)的優(yōu)化設(shè)計(jì)使振動(dòng)性能評(píng)價(jià)指標(biāo)降低。選擇懸架的剛度和阻尼為優(yōu)化設(shè)計(jì)變量,其懸架偏頻、阻尼系數(shù)、動(dòng)撓度界限值和車輪相對(duì)動(dòng)載應(yīng)滿足汽車懸架設(shè)計(jì)要求的約束,并使所有振動(dòng)性能評(píng)價(jià)指標(biāo)最小為多目標(biāo)優(yōu)化函數(shù)。由圖5可以看出,優(yōu)化后的振動(dòng)性能指標(biāo)均有不同程度下降,尤其是在低速情況下。當(dāng)然,優(yōu)化還沒有達(dá)到單獨(dú)路面激勵(lì)的程度,由此說明,與傳統(tǒng)汽車相比,開關(guān)磁阻電機(jī)的引入使電動(dòng)汽車的振動(dòng)性能面臨新的問題,有必要對(duì)開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車甚至所有輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車的振動(dòng)性能開展更為全面的研究和分析,以便為電動(dòng)汽車的振動(dòng)性能改善、優(yōu)化和控制奠定堅(jiān)實(shí)的基礎(chǔ)。
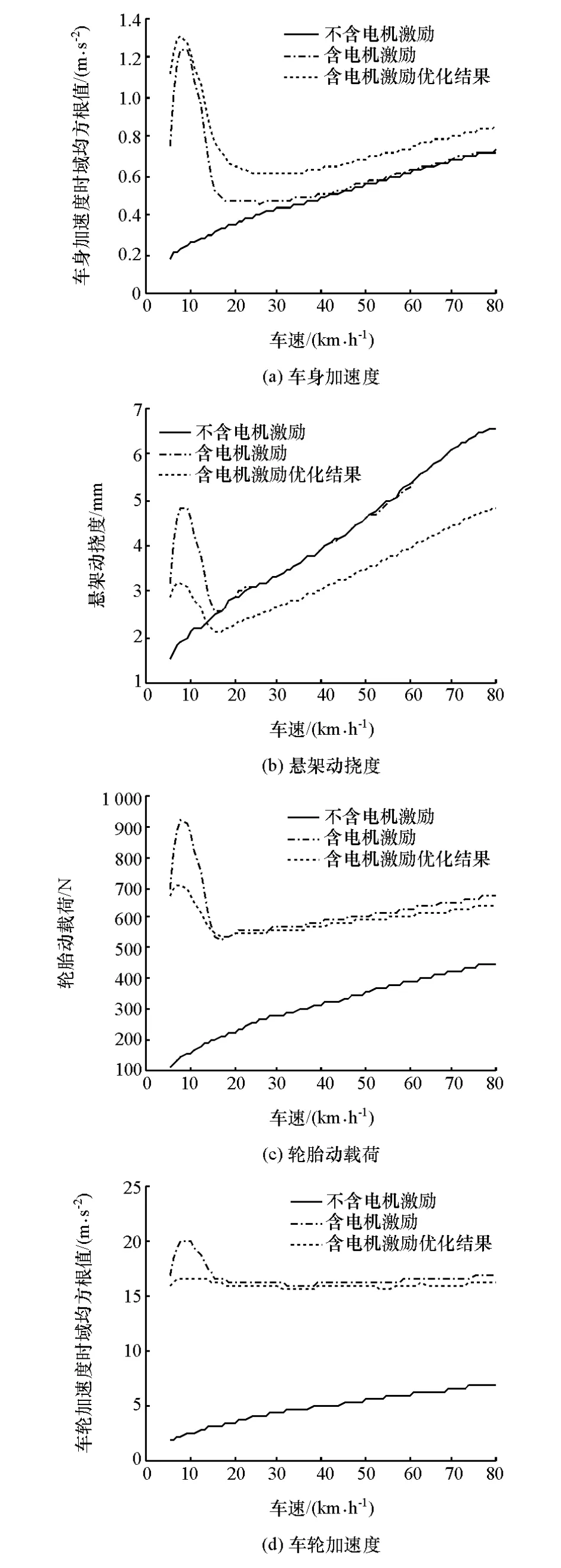
圖5 理想和偏心兩種情況對(duì)電動(dòng)汽車振動(dòng)性能的影響
5 結(jié)論
針對(duì)開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)問題,以易于理解與應(yīng)用的方式,建立了開關(guān)磁阻電機(jī)激勵(lì)的模型和路面濾波白噪聲的模型,考慮了行駛時(shí)電機(jī)和路面兩種激勵(lì),確定了開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車1/4汽車2自由度系統(tǒng)振動(dòng)模型和性能指標(biāo),通過仿真分析了電機(jī)和路面對(duì)開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車振動(dòng)的影響。
研究結(jié)果表明,在開關(guān)磁阻電機(jī)轉(zhuǎn)子和定子沒有偏心的理想情況下,不存在電機(jī)激勵(lì),開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車只受到路面激勵(lì)的作用;在開關(guān)磁阻電機(jī)有因制造、裝配和使用導(dǎo)致的轉(zhuǎn)子和定子偏心的情況下,存在電機(jī)激勵(lì),開關(guān)磁阻電機(jī)驅(qū)動(dòng)電動(dòng)汽車受到路面和電機(jī)聯(lián)合激勵(lì)的作用;路面和電機(jī)聯(lián)合激勵(lì)下,低速范圍(5~20km/h)內(nèi)的車身加速度和懸架動(dòng)撓度,整個(gè)速度范圍內(nèi)的車輪動(dòng)載荷和車輪加速度,明顯高于路面單獨(dú)激勵(lì)下的對(duì)應(yīng)量。
參考文獻(xiàn)
[1]MURATA S.Innovation by in-wheel-motor drive unit[J].Vehicle System Dynamics,2012,50(6):807-830.
[2]ETSUO KATSUYAMA.Decoupled 3D moment control using inwheel motors[J].Vehicle System Dynamics,2013,51(1):18-31.
[3]譚迪,羅玉濤,葉志偉.內(nèi)置懸置輪轂電機(jī)驅(qū)動(dòng)系統(tǒng)參數(shù)靈敏度分析[J].華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2013,41(5):131-138.
[4]童煒,侯之超.輪轂驅(qū)動(dòng)電動(dòng)汽車垂向特性與電機(jī)振動(dòng)分析[J].汽車工程,2014,36(4):398-403.
[5]宋傳學(xué),肖峰,劉思含,等.基于無跡卡爾曼濾波的輪轂電機(jī)驅(qū)動(dòng)車輛狀態(tài)觀測[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2016,46(2):333-339.
[6]靳彪,張欣,彭之川,等.四輪輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車建模與仿真[J].中國公路學(xué)報(bào),2016,29(47):138-144.
[7]MAHAVIR SINGH NARUJA, CHAUHAN D S, SINGH S N.Switched reluctance motor drive system R&D status[J].MIT International Journal of Electrical and Instrumentation Engineering,2012,2(2):82-87.
[8]吳建華.開關(guān)磁阻電機(jī)設(shè)計(jì)與應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2000.
[9]李俊卿.開關(guān)磁阻電機(jī)發(fā)展綜述[J].華北電力大學(xué)學(xué)報(bào),2002,29(1):1-5.
[10]薛玉春,張義民,賀向東.電動(dòng)汽車的開關(guān)磁阻電動(dòng)機(jī)驅(qū)動(dòng)及其系統(tǒng)激振仿真[J].中國機(jī)械工程,2007,18(11):1378-1382.
[11]張義民,薛玉春,賀向東,等.基于開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng)的電動(dòng)汽車振動(dòng)研究[J].汽車工程,2007,29(1):46-49.
[12]薛玉春,張義民,賀向東.電動(dòng)汽車開關(guān)磁阻電機(jī)的激振力研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(2):25-29.
[13]李以農(nóng),孫偉,王艷陽.電動(dòng)汽車開關(guān)磁阻輪轂電機(jī)振動(dòng)噪聲負(fù)效應(yīng)及控制[C].中國汽車工程學(xué)會(huì)年會(huì)論文集,2014:1363-1366.
[14]朱延蕾.多軸重型特種汽車在不同路面下振動(dòng)性能的仿真與評(píng)價(jià)[D].長春:吉林大學(xué),2014.
[15]余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2010.
[16]趙旗,王維,李杰,等.基于濾波白噪聲的汽車平順性時(shí)域建模和仿真[J].科學(xué)技術(shù)與工程,2016,16(27):283-287.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
