智能定位自輸送采果輔助機(jī)的設(shè)計(jì)
2018-05-22 01:56:04郝翠青胡堯
數(shù)碼設(shè)計(jì) 2018年1期
郝翠青*,胡堯
?
智能定位自輸送采果輔助機(jī)的設(shè)計(jì)
郝翠青*,胡堯
(武漢理工大學(xué),湖北武漢,430063)
設(shè)計(jì)了一種智能定位自輸送采果輔助機(jī),能夠針對(duì)高處蘋果進(jìn)行智能化定位采摘,并通過(guò)快速收集來(lái)實(shí)現(xiàn)連續(xù)性采摘作業(yè),考慮到采摘機(jī)構(gòu)的各部件在運(yùn)行時(shí)需要較高的協(xié)調(diào)性、準(zhǔn)確性,以及與定位機(jī)構(gòu)各部件搭配的合理性,本系統(tǒng)采用PLC作為控制元件,控制各運(yùn)動(dòng)機(jī)構(gòu)的相應(yīng)電機(jī)或元件,以此實(shí)現(xiàn)精確定位及協(xié)調(diào)工作。本論文從果農(nóng)的實(shí)際采摘情況入手,設(shè)計(jì)出了操作簡(jiǎn)便的采果輔助機(jī),對(duì)果農(nóng)的采摘作業(yè)起到了有效協(xié)助作用。不僅提高了高處蘋果的采摘效率,保障了蘋果成品質(zhì)量,同時(shí)也降低了工作人員的勞動(dòng)強(qiáng)度和采摘成本。
采果輔助機(jī);智能定位采摘;連續(xù)性作業(yè)
引言
蘋果作為世界上僅次于柑桔、香蕉、葡萄之后的第四大水果,栽培地點(diǎn)遍及全球93 個(gè)國(guó)家和地區(qū)[1]。中國(guó)是蘋果的起源地之一。在中國(guó),蘋果種植具有悠久的生產(chǎn)歷史和得天獨(dú)厚的地理環(huán)境、氣候條件。2015年我國(guó)蘋果種植面積和產(chǎn)量分別為227萬(wàn)公頃和4261萬(wàn)噸,分別占世界蘋果栽培面積和產(chǎn)量的47%和51%。
大量的蘋果種植也帶來(lái)了大量的勞動(dòng)力需求。蘋果屬于勞動(dòng)密集型產(chǎn)業(yè),生產(chǎn)優(yōu)質(zhì)蘋果需要大量的人工投入[2]。調(diào)查發(fā)現(xiàn),蘋果采收過(guò)程中,采摘人員需事先攜帶籃筐,依照從下到上,從外向里的采摘順序采摘蘋果,采摘的蘋果需及時(shí)放入籃筐,長(zhǎng)在高處的蘋果需用梯子采摘。然而,人工采摘存在耗時(shí)長(zhǎng)、高處采摘移動(dòng)受限、長(zhǎng)期采摘易引起工作人員的不適感,不利于采摘人員的長(zhǎng)期作業(yè)。
為解決上述果園人工采摘所面臨的問(wèn)題,提高蘋果采摘效率、保證蘋果完好度,為數(shù)量巨大的蘋果種植商帶來(lái)極高的經(jīng)濟(jì)效益,幫助渤海灣產(chǎn)區(qū)百姓在蘋果采摘過(guò)程中最大程度地省時(shí)省力,降低成本,提高效率,項(xiàng)目組設(shè)計(jì)了該款蘋果摘收機(jī)。
1 裝置結(jié)構(gòu)
智能定位自輸送采果輔助機(jī)能夠在果樹(shù)一定高度范圍內(nèi)實(shí)現(xiàn)智能化定位采摘、連續(xù)性收集的一體化作業(yè)。本項(xiàng)目的機(jī)械機(jī)構(gòu)的設(shè)計(jì)主要包含采摘機(jī)構(gòu)和收集機(jī)構(gòu)。

圖1 智能定位自輸送采果輔助機(jī)的整體設(shè)計(jì)圖
1.1 采摘機(jī)構(gòu)
采摘機(jī)構(gòu)為了搭配控制系統(tǒng)方面實(shí)現(xiàn)智能定位采摘,整體分為三爪采摘器、改進(jìn)步進(jìn)電機(jī)和4自由度機(jī)械臂三個(gè)部分,并通過(guò)套筒等連接件完成三部分功能上的連接。
三爪采摘器由三個(gè)內(nèi)表面貼有軟膠材質(zhì)的曲面爪、連接壓塊、復(fù)位彈簧、鋼絲軟線、彈簧固定套筒組成,其整體處于采摘機(jī)構(gòu)的上方;改進(jìn)步進(jìn)電機(jī)由傳統(tǒng)步進(jìn)電機(jī)、防旋轉(zhuǎn)滑塊組成。三爪采摘器與改進(jìn)步進(jìn)電機(jī)內(nèi)部通過(guò)鋼絲軟線進(jìn)行連接,實(shí)現(xiàn)功能與效應(yīng)的傳遞;外部通過(guò)固定套筒連接,對(duì)應(yīng)上下部均有螺釘固定連接,套筒自身通過(guò)底端與機(jī)械臂的連接來(lái)實(shí)現(xiàn)位置的固定。采摘機(jī)構(gòu)整體如圖2所示。
機(jī)械臂是控制三爪手運(yùn)動(dòng)的主要執(zhí)行機(jī)構(gòu),主要部件由基座、主臂、腕部和各個(gè)關(guān)節(jié)構(gòu)成,如圖3所示。包括腕部俯仰、腕部回轉(zhuǎn)、主臂仰俯和主臂回轉(zhuǎn)4種運(yùn)動(dòng)形式。
1.2 收集機(jī)構(gòu)
整體樣貌為兩個(gè)方向相反的小圓臺(tái)與大方臺(tái)側(cè)面的組合,主桿上端固定連接一個(gè)正圓臺(tái)側(cè)面的小緩沖篷;以該小緩沖篷的大圓面為自身的小頂面,在支撐架上固定連接一個(gè)倒方臺(tái)側(cè)面的大緩沖篷。該組合設(shè)計(jì)實(shí)現(xiàn)了對(duì)蘋果的全平面初步緩沖接納。在支撐架下端是一個(gè)緩沖網(wǎng),其樣式如同籃球框上的球網(wǎng),起到對(duì)從大緩沖篷滾下再通過(guò)支撐架的蘋果的進(jìn)一步緩沖保護(hù)。另外,大緩沖篷與緩沖網(wǎng)之間的支撐架表面添加有軟質(zhì)緩沖材料,避免蘋果直接落到支撐架上帶來(lái)的損壞。收集機(jī)構(gòu)整體效果圖如圖4所示。

圖4 收集機(jī)構(gòu)整體效果圖
兩個(gè)傾角均為緩沖篷對(duì)應(yīng)母線與水平面之間所夾銳角。兩個(gè)緩沖篷的傾角很大程度上影響著蘋果的收集質(zhì)量,太大與太小都不利于對(duì)蘋果收集時(shí)的緩沖。本項(xiàng)目組考慮到實(shí)際情況,初步將小緩沖角1設(shè)計(jì)為25°,將大緩沖篷傾角2設(shè)計(jì)為10°。
2 整體控制
對(duì)于基于視覺(jué)的機(jī)械臂控制來(lái)說(shuō),機(jī)器人視覺(jué)是一個(gè)非常重要的組成部分。機(jī)器人只有在視覺(jué)的指引之下,才能獲得目標(biāo)的正確信息,從而控制機(jī)械臂完成指定的任務(wù)。視覺(jué)系統(tǒng)必須在標(biāo)定的基礎(chǔ)上,識(shí)別目標(biāo)對(duì)象的位置和姿態(tài)[3]。由于蘋果與周圍環(huán)境的色調(diào)相差較大,所以基于HSV(hue-saturation—value)色彩空間來(lái)識(shí)別圖像,用Matlab圖像處理工具箱提供了大量數(shù)字圖像處理的函數(shù),可以實(shí)現(xiàn)各種分割算法[4]。
采摘過(guò)程中,利用HSV顏色切割識(shí)別出目標(biāo)果實(shí),然后將果實(shí)圖像圓形化,利用最小二乘法近似求解果實(shí)圓心,以此目標(biāo)物體的三維坐標(biāo)。識(shí)別定位過(guò)程如圖5所示。
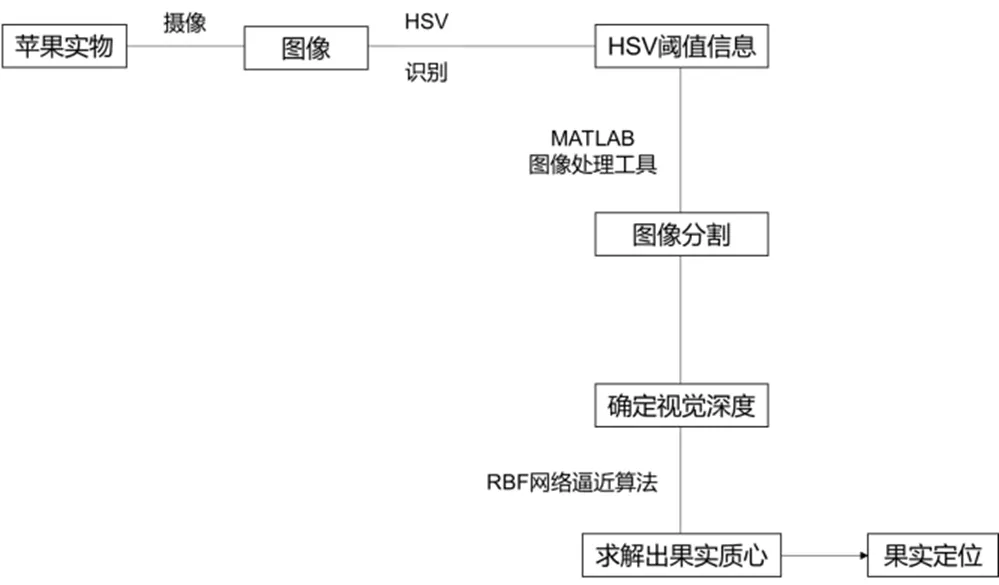
圖5 蘋果識(shí)別定位過(guò)程
本模型用蒙特卡洛(Monte Carlo)法得到機(jī)械臂的操作空間,機(jī)械臂的自由空間確定后,通過(guò)隨機(jī)路標(biāo)法,可得規(guī)劃路徑,應(yīng)用逆向?qū)挾葍?yōu)先搜索與Dijkstra算法,得到一個(gè)對(duì)路徑進(jìn)行安全性優(yōu)化的數(shù)學(xué)模型,機(jī)械臂路徑規(guī)劃過(guò)程如圖6所示。

圖6 機(jī)械臂路徑規(guī)劃
根據(jù)雙目攝像機(jī)所識(shí)別定位得到的位姿,由軌跡規(guī)劃算法逆解機(jī)械臂運(yùn)動(dòng)學(xué),計(jì)算出各舵機(jī)角度、角速度,將其換算成PLC控制的內(nèi)部指令,然后發(fā)送到各舵機(jī)控制器,再通過(guò)驅(qū)動(dòng)板驅(qū)動(dòng)各舵機(jī)運(yùn)動(dòng)[5],如圖7所示。

圖7 機(jī)械臂控制運(yùn)動(dòng)過(guò)程
首先控機(jī)械手由點(diǎn)A移動(dòng)到與點(diǎn)C處于同一高度的點(diǎn)B,由點(diǎn)B運(yùn)動(dòng)到點(diǎn)C,此規(guī)劃方法先使手爪和目標(biāo)處于同一高度,能大程度上減少機(jī)械臂運(yùn)動(dòng)過(guò)程中與枝葉不必要的碰撞。
3 應(yīng)用前景
目前,蘋果產(chǎn)業(yè)的高速發(fā)展與蘋果采摘行業(yè)的自動(dòng)化水平緩慢發(fā)展之間的矛盾,造成了如今大量的勞動(dòng)力投入到蘋果采摘的相關(guān)產(chǎn)業(yè)。這主要是采摘工作機(jī)械化水平不高,人們的勞動(dòng)效率低下,勞動(dòng)成本降不下來(lái),生產(chǎn)效率提不上去造成的。機(jī)械裝備市場(chǎng)中現(xiàn)存的林果業(yè)機(jī)具種類較少,品種單一,且機(jī)械性能和組合型結(jié)構(gòu)簡(jiǎn)單,技術(shù)含量不高,不能滿足日益增長(zhǎng)的林果業(yè)發(fā)展需求,急待更新?lián)Q代,以達(dá)到提升林果機(jī)械化技術(shù)的科技含量的目的。
本產(chǎn)品的設(shè)計(jì)初衷就是輔助人們的工作,將水果的采摘、放置功能結(jié)合在一起,提高人們的工作效率。本產(chǎn)品采用智能化識(shí)別定位技術(shù)幫助人們快速、準(zhǔn)確地找到蘋果的位置,再利用機(jī)械結(jié)構(gòu)準(zhǔn)確地較大范圍內(nèi)摘取蘋果,最后利用收集裝置自動(dòng)收集果實(shí),無(wú)需在采摘后再進(jìn)行人工整理。另外,本產(chǎn)品相對(duì)便捷、易于移動(dòng),在很大程度上提高蘋果采摘效率并且節(jié)省了勞動(dòng)力。
4 結(jié)束語(yǔ)
為提高蘋果采摘效率、保證蘋果完好度,為數(shù)量巨大的蘋果種植商帶來(lái)極高的經(jīng)濟(jì)效益,設(shè)計(jì)了智能定位自輸送采果輔助機(jī),產(chǎn)品的特點(diǎn)主要體現(xiàn)在以下幾點(diǎn):
(1)智能定位自輸送采果輔助機(jī)的采摘機(jī)構(gòu),整體分為三爪采摘器、改進(jìn)步進(jìn)電機(jī)兩個(gè)部分,并通過(guò)套筒連接,兩個(gè)部分靈活配合,為實(shí)現(xiàn)蘋果的準(zhǔn)確快速采摘奠定重要基礎(chǔ);
(2)采果輔助機(jī)的智能定位機(jī)構(gòu),;定位機(jī)構(gòu)主要由機(jī)械臂以及其上的雙目攝像頭組成。機(jī)械臂是控制三抓手運(yùn)動(dòng)的主要執(zhí)行機(jī)構(gòu),通過(guò)對(duì)機(jī)械臂運(yùn)動(dòng)的智能控制,實(shí)現(xiàn)了蘋果的精準(zhǔn)識(shí)別與定位;
(3)采摘機(jī)的收集機(jī)構(gòu),本項(xiàng)目組設(shè)計(jì)了一體化收集機(jī)構(gòu),通過(guò)緩沖網(wǎng)結(jié)構(gòu)實(shí)現(xiàn)蘋果的一次性多個(gè)收集,以保證蘋果的連續(xù)性采摘。
[1] 范英. 中國(guó)蘋果生產(chǎn)布局變遷研究[D]. 西北農(nóng)林科技大學(xué), 2010.
[2] 郭正. 黃土高原旱作蘋果園地水分生產(chǎn)力和深層土壤干燥化效應(yīng)模擬研究[D]. 西北農(nóng)林科技大學(xué), 2015.
[3] 李蘇寧. 基于圖像的機(jī)械臂視覺(jué)控制系統(tǒng)設(shè)計(jì)[D]. 哈爾濱工業(yè)大學(xué), 2011.
[4] 包全磊. 基于HSV空間的彩色圖像分割[J]. 軟件導(dǎo)刊, 2010, 09(7): 171-172.
[5] 徐昱琳, 楊永煥, 李昕, 等. 基于雙目視覺(jué)的服務(wù)機(jī)器人仿人機(jī)械臂控制[J]. 上海大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 18(5): 506-512.
Design of Intelligent Positioning Self - conveying Picking Assist Machine
HAO Cuiqing*, HU Yao
(Wuhan University of Technology, Hubei Wuhan, 430063, China)
A smart positioning self-conveying pick-up assisting machine is designed. It can intelligently position and pick the apples at high altitude and realize the continuous picking operation by collecting quickly. Considering that the components of picking mechanism need to be higher during operation The coordination, accuracy, and the rationality of collocation with each component of the positioning mechanism. The system adopts PLC as a control component to control corresponding motors or components of each movement mechanism so as to achieve precise positioning and coordination. In this paper, we start with the actual picking situation of fruit growers, and design an easy-to-use fruit picking assisting machine, which plays an effective role in assisting the picking of fruit growers. Not only improve the picking efficiency of apple height, protect the quality of the finished apple, but also reduce the staff's labor intensity and picking costs.
picking fruit assisting machine; intelligent positioning picking; continuous working
10.19551/j.cnki.issn1672-9129.2018.01.048
TP393
A
1672-9129(2018)01-0120-03
郝翠青, 胡堯. 智能定位自輸送采果輔助機(jī)的設(shè)計(jì)[J]. 數(shù)碼設(shè)計(jì), 2018, 7(1): 120-122.
HAO Cuiqing, HU Yao. Design of Intelligent Positioning Self - conveying Picking Assist Machine[J]. Peak Data Science, 2018, 7(1): 120-122.
2017-11-23;
2017-12-27。
陳志民(1975-),男,福建廈門,高級(jí)工程師,工程學(xué)士,研究方向:電力系統(tǒng)及自動(dòng)化。E-mail:2474958762@qq.com
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
