動(dòng) 態(tài) 云 模 型 編 碼 的 圖 像 增 強(qiáng)
2018-05-22 01:17:14姚成乾
實(shí)驗(yàn)室研究與探索 2018年3期
關(guān)鍵詞:模型
陳 偉, 姚成乾
(永城職業(yè)學(xué)院 電子工程信息系, 河南 永城 476600)
0 引 言
圖像在傳輸過程中,由于人為以及環(huán)境噪聲因素的影響,導(dǎo)致了獲得的圖像暗淡或更加模糊,不能準(zhǔn)確識(shí)別圖像信息,嚴(yán)重地影響了圖像質(zhì)量,因此對(duì)圖像增強(qiáng)十分必要[1-2]。濾波算法對(duì)圖像增強(qiáng)是以圖像分辯率的降低為代價(jià)[3],對(duì)信噪比較低的圖像進(jìn)行增強(qiáng)時(shí)效果較差;全局二值化算法計(jì)算簡(jiǎn)單,速度較快[4],但是若增強(qiáng)背景變得復(fù)雜,難于找到一個(gè)適用于整幅圖像的統(tǒng)一閾值;游程編碼算法特別適用于灰度等級(jí)少、灰度值變化小的圖像[5],但是傳輸中若某個(gè)符號(hào)發(fā)生錯(cuò)誤,影響整個(gè)編碼序列;跳白塊編碼算法利用圖像有大量白色區(qū)域這一特點(diǎn)而提出的編碼[6],但是二值圖像在其不同的地方像素的分布情況是不一樣的,導(dǎo)致了編碼效率低;方塊編碼算法把整個(gè)圖像分成等大小的子塊,根據(jù)塊內(nèi)像素出現(xiàn)概率編碼,簡(jiǎn)單、易于實(shí)現(xiàn)[7],但是若方塊尺寸過小時(shí),以致信息集合的數(shù)量太大,以致編碼難以應(yīng)用;小波變換算法克服了增強(qiáng)窗口大小固定的缺點(diǎn)[8],但是小波基的選取太難,同時(shí)冗余度很大。
本文采用動(dòng)態(tài)云模型編碼算法,通過高斯云產(chǎn)生器產(chǎn)生云模型的云滴;確定云模型編碼域以及編碼規(guī)則,動(dòng)態(tài)調(diào)整控制參數(shù);對(duì)圖像像素背景區(qū)域和目標(biāo)區(qū)分編碼,給出了增強(qiáng)過程。實(shí)驗(yàn)仿真顯示本文算法對(duì)圖像增強(qiáng)清晰,運(yùn)行時(shí)間較少,性能指標(biāo)較優(yōu)。
1 動(dòng)態(tài)云模型編碼過程
1.1 基于高斯云的云滴產(chǎn)生器
1.1.1云模型
云模型是實(shí)現(xiàn)定性與定量之間相互轉(zhuǎn)換的不確定性模型[9-10]。設(shè)U是一個(gè)用精確數(shù)值表示的定量論域,C是U上的定性概念,對(duì)于論域中的任意一個(gè)元素x,且x是C的一次隨機(jī)實(shí)現(xiàn),x對(duì)C的確定度μ(x)∈0,1,是有穩(wěn)定傾向的隨機(jī)數(shù),則稱
μ:U→0,1, ?x∈U,x→μ(x)
(1)
式中:x在論域上的分布稱為隸屬云,簡(jiǎn)稱云,云是從論域U到區(qū)間[0,1]的映射,其中每一個(gè)x稱為每一個(gè)云滴。
基于高斯分布可以構(gòu)成高斯云模型,它有3個(gè)數(shù)字特征,可表示為(Ex,En,He),Ex是論域空間中最具代表性的數(shù)值,即期望;熵En反映了論域中可被接受的數(shù)域范圍,是標(biāo)準(zhǔn)差的期望;超熵He是標(biāo)準(zhǔn)差的標(biāo)準(zhǔn)差,在數(shù)域中代表數(shù)據(jù)的凝聚性,是定性概念的不確定性度量。
1.1.2產(chǎn)生云滴過程
具有數(shù)字特征(Ex,En,He),N個(gè)云滴的生成過程如下[11]:① 生成以En為期望,He2為方差的一個(gè)正態(tài)隨機(jī)熵
,He2)

③ 計(jì)算
具有確定度yi的xi成為論域U中的一個(gè)云滴。
④ 重復(fù)步驟①~③,直至產(chǎn)生N個(gè)云滴。
不同高斯云模型比較如圖1所示。
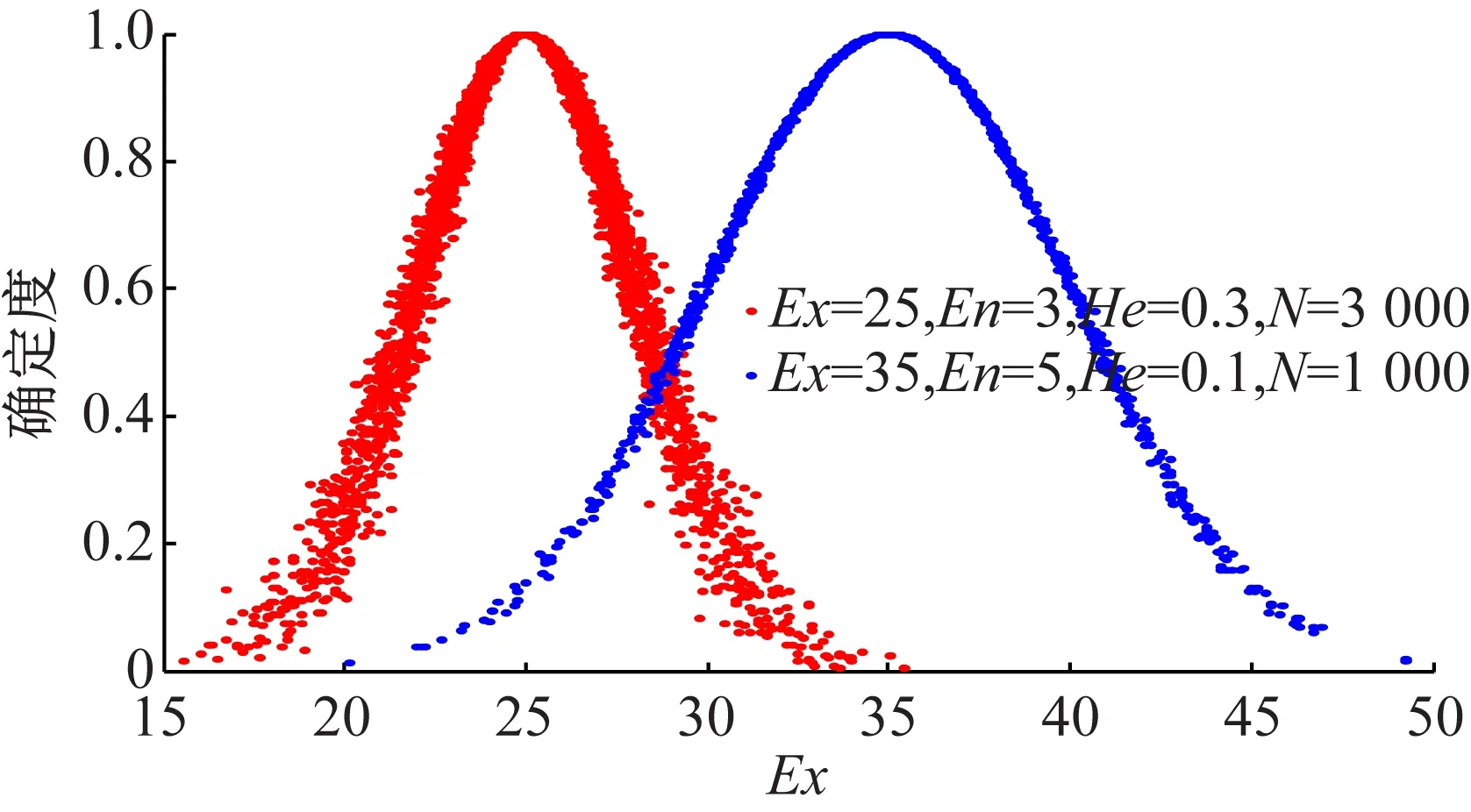
圖1 不同高斯云模型比較圖
從圖1可以看出,云滴N的個(gè)數(shù)越多,越能反映該定性概念的整體特征;Ex在論域中的中心點(diǎn);En反映定性概念的云滴離散程度,也反映了論域空間中可被概念接受的云滴的取值范圍;He的大小間接地反映云的厚度,超熵越大,云的厚度越大。
1.1.3云模型編碼域選擇
若要對(duì)高斯云進(jìn)行編碼,由于其云滴所處的位置不同決定其對(duì)數(shù)據(jù)優(yōu)化的貢獻(xiàn)率,高斯云群中的云滴根據(jù)其對(duì)概念的貢獻(xiàn)的不同可以劃分成骨干域、基本域、外圍域和弱外圍域,如表1所示。
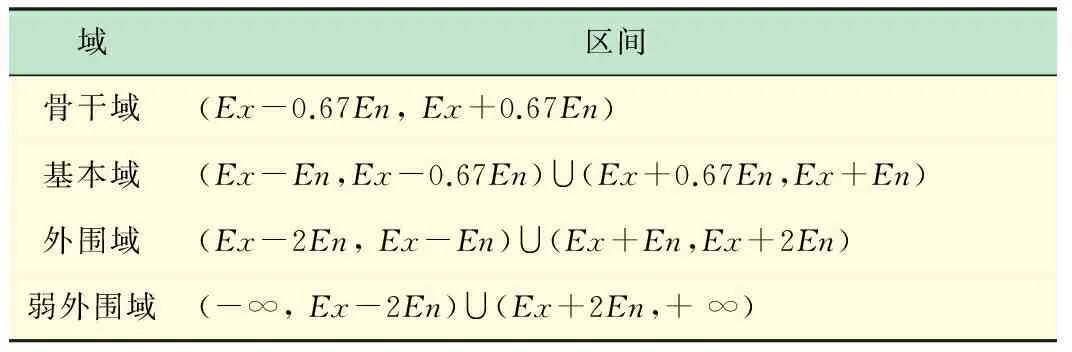
表1 云模型域劃分
用偏離度θ來衡量某一狀態(tài)下云重心與正理想狀態(tài)下云重心的差異[12],θ值越小,表示此狀態(tài)偏離正理想狀態(tài)越小;θ值越大,則偏離正理想狀態(tài)越大,把各云滴屬性指標(biāo)歸一化后的重心向量值乘以相應(yīng)權(quán)重值,再相加,即可得偏離度θ值,
(2)

1.2 編碼規(guī)則
1.2.1編碼過程
圖像像素的灰度值作為云模型的云滴[13],云滴首位用二進(jìn)制0、1值表示,其中0表示其像素的灰度值小于圖像平均灰度值,1表示其像素的灰度值大于圖像平均灰度值;中間位的位數(shù)最大為8位二進(jìn)制,代表像素空間位置;末位代表決策變量。通過云滴的編碼表示像素的位置和灰度特征,如xij:i為云中的第i個(gè)云滴;j為該云滴的第j個(gè)決策變量。決策變量用m個(gè)二進(jìn)制位編碼表示,長度為l=mD,D為云滴的維數(shù)。每個(gè)云滴末位有2個(gè)決策變量,每一個(gè)決策變量由5位二進(jìn)制編碼,第一個(gè)決策變量表示相似性屬性,其值越大則越相似,相似性屬性利于判斷像素是目標(biāo)還是背景,第二個(gè)決策變量表示權(quán)重性屬性,值越大則權(quán)越大,利于判斷像素在目標(biāo)或者背景中的性質(zhì),同時(shí)也利于判斷其周圍像素屬性,表2給出了xij的決策部分編碼規(guī)則。
決策變量為編碼圖像劃分了不同的區(qū)域。
1.2.2云編碼個(gè)體的評(píng)價(jià)
設(shè)云編碼個(gè)體Pi=x1,x2,…,xn,對(duì)變量xm對(duì)應(yīng)的云進(jìn)行采樣的云為c1,c2,…,cn。設(shè)云滴數(shù)量為

表2 決策部分編碼規(guī)則
N,高斯云發(fā)生器算法生成云對(duì)個(gè)體Pi進(jìn)行采樣[14]。采樣后的個(gè)體Pi由解空間中的N個(gè)點(diǎn)組成,取N個(gè)點(diǎn)中的最優(yōu)點(diǎn)即代表云編碼個(gè)體Pi的適應(yīng)度值。
1.3 動(dòng)態(tài)控制過程
En反映了獲取最優(yōu)解的能力[15],控制參數(shù)En的動(dòng)態(tài)調(diào)整如下:
(3)
式中:k1為編程可搜索范圍1/3;k2為編程可搜索范圍1/6;fmax、favg分別為云中適應(yīng)度的最大值和平均值;f′為迭代操作中個(gè)體中較大的適應(yīng)度;α=9.906 541 6。
2 圖像增強(qiáng)
2.1 云模型編碼劃分圖像
云編碼是對(duì)圖像像素進(jìn)行背景區(qū)域和目標(biāo)區(qū)分[16],對(duì)于任意像素(i,j),把包含該像素在內(nèi)的其周圍4個(gè)像素集合稱為像素(i,j)的鄰域,如圖2所示4-鄰域結(jié)構(gòu)。
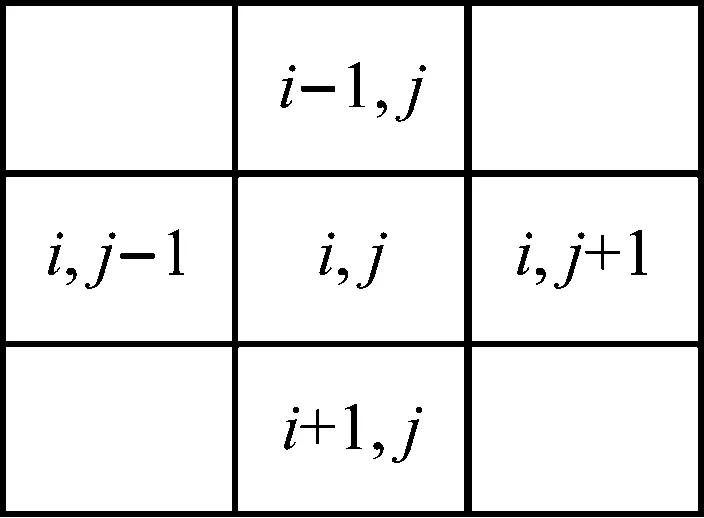
圖2 4-鄰域結(jié)構(gòu)
若(i,j)編碼為:1000111111110010101, (i+1,j+1)為1111111111110010101,只有碼頭和決策部分一致條件下,才能夠判斷(i+1,j+1)與(i,j)屬性相同。從像素(i,j)到像素(in,jn)的路徑是指一個(gè)像素序列(i,j),(i1,j1),…,(in,jn),其中像素(ik,jk)是像素ik+1,jk+1的近鄰像素,0≤k≤n-1.如果近鄰關(guān)系是4-連通的,則路徑是4-路徑,如圖3所示。
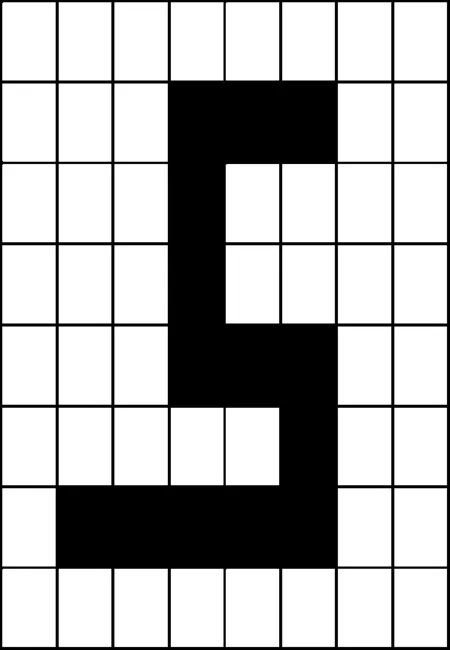
圖3 4-路徑示意圖
通過棋盤距離:
dChess=max(|i1-i2|,|j1-j2|)
(4)
找到一幅圖像中2個(gè)連通成分之間的距離,這樣可避免誤增強(qiáng)的發(fā)生,因?yàn)橹挥?個(gè)連通成分的碼頭才為一致。
2.2 雙量子算法增強(qiáng)過程
輸入圖像f中m,n處像素的雙量子比特態(tài)為|ψ〉mn,m∈1,2,…,M,n∈1,2,…,N,第1個(gè)量子比特態(tài)反映以m,n為中心區(qū)域的灰度中值;第2個(gè)量子比特態(tài)反映以m,n的灰度值[17]。雙量子比特態(tài)的4個(gè)基態(tài)為|00〉,|01〉,|10〉和|11〉,雙量子比特態(tài)處于這4個(gè)基態(tài)的疊加態(tài):
|f′(l,k)〉=cosf(l,k)·π/2|00〉+
sinf(l,k)·π/2|01〉+cosf(l,k)·π/2|10〉+sinf(l,k)·π/2|11〉
(5)


(6)
E(l,k)為增強(qiáng)后圖像,灰度值范圍[0,255],其中fi為歸一化數(shù)值。設(shè)圖像質(zhì)量測(cè)量函數(shù)(Quality Measurement Function,QMF)為:
(7)

算法過程:① 輸入圖像,通過動(dòng)態(tài)云模型進(jìn)行編碼;② 對(duì)比像素之間的編碼,找出編碼之間的差異;③ 對(duì)差異編碼的像素進(jìn)行雙量子比特態(tài)測(cè)量,獲得雙量子比特最佳概率;④ 對(duì)圖像增強(qiáng),滿足圖像質(zhì)量測(cè)量函數(shù),轉(zhuǎn)至步驟⑤;否則轉(zhuǎn)至步驟②;⑤ 輸出圖像。
3 實(shí)驗(yàn)仿真
3.1 增強(qiáng)視覺分析
實(shí)驗(yàn)PC配置為CPU3.0 GHz、內(nèi)存4 GB、IntelH61主板,集成顯卡,Matlab編程實(shí)現(xiàn)仿真,原始模糊Lena圖像如圖4(a)所示,各種算法的增強(qiáng)如圖4(b)~(h)所示。圖4(h)為本文算法增強(qiáng)結(jié)果,圖4 (b)為濾波算法增強(qiáng)結(jié)果,圖4(c)為全局二值化算法增強(qiáng)結(jié)果,圖4 (d )為游程編碼算法增強(qiáng)結(jié)果,圖4(e)為跳白塊編碼算法增強(qiáng)結(jié)果,圖4(f)為方塊編碼算法增強(qiáng)結(jié)果,圖4(g)為小波變換算法增強(qiáng)結(jié)果。從增強(qiáng)結(jié)果中可以看出,本文算法能夠?qū)δ:膱D像進(jìn)行增強(qiáng),增強(qiáng)結(jié)果清晰,同時(shí)背景凈化,使得人像和背景更加區(qū)分,其他算法增強(qiáng)結(jié)果雖然比原始灰度圖像有所改善,但是依然無法清晰度需求,達(dá)不到增強(qiáng)圖像的目的。這是因?yàn)楸疚乃惴ㄒ詧D像影像中的像素灰度值為觀測(cè)值,在云發(fā)生器中得到該像素隸屬度,云模型中云滴的選擇域也具有多樣性和重要性,使得兩個(gè)連通的像素域能夠進(jìn)行正確增強(qiáng)。
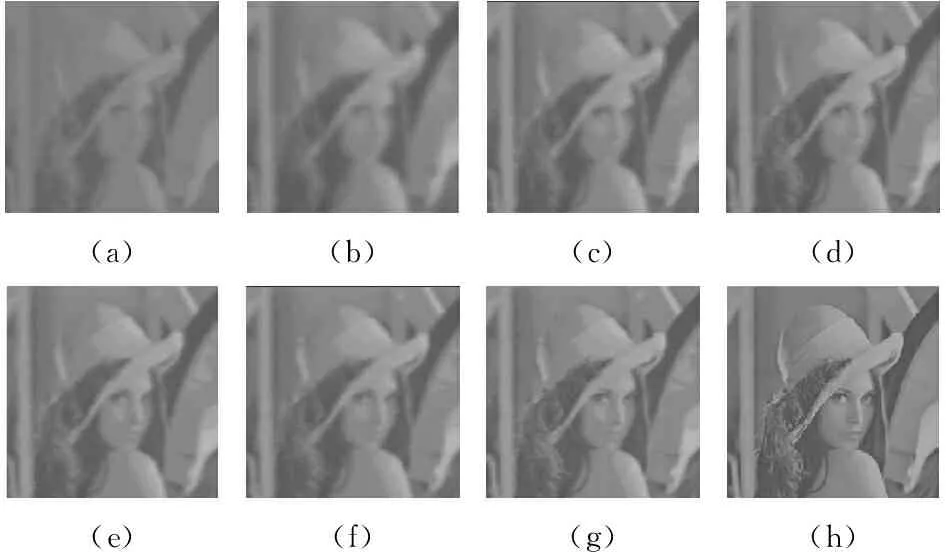
(a)(b)(c)(d)(e)(f)(g)(h)
圖4 增強(qiáng)對(duì)比結(jié)果
3.2 算法性能分析
峰值信噪比(Peak Signal to Noise Ratio,PSNR)是圖像灰度的峰值與噪聲方差之比,單位是dB,其評(píng)價(jià)相對(duì)客觀,
(8)
式中:f(x,y)為增強(qiáng)后圖像;g(x,y)為增強(qiáng)前圖像;M、N為圖像寬和高。PSNR值越大,表明增強(qiáng)質(zhì)量越好。
偏差指數(shù)(Difference Index,DI)用來比較增強(qiáng)圖像和標(biāo)準(zhǔn)圖像偏離的程度,定義增強(qiáng)圖像的偏差指數(shù)的表達(dá)式為:
(9)

對(duì)圖4(a)各種算法完成增強(qiáng)所需要的時(shí)間、PSNR值和DI值的仿真結(jié)果分別如圖5~7所示。
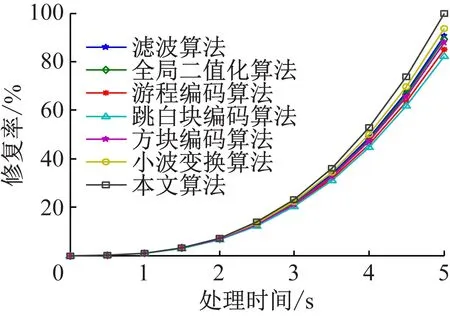
圖5 各種算法完成所需要的時(shí)間
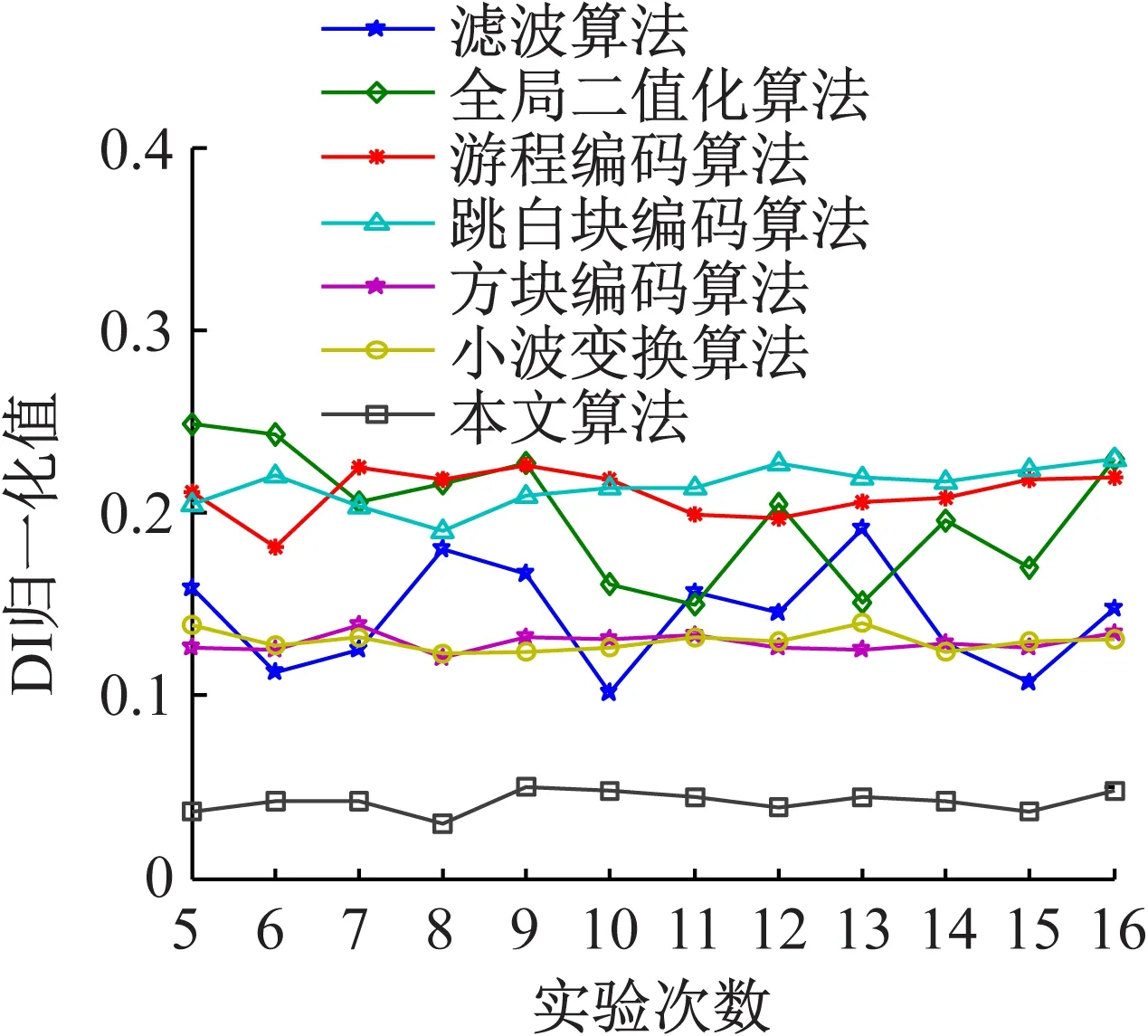
圖7 各種算法的DI仿真結(jié)果
從圖5~7的仿真結(jié)果可以看出,本文算法處理時(shí)間少,PSNR值最大,DI指標(biāo)最小,這些指標(biāo)所具有的優(yōu)勢(shì)使得增強(qiáng)效果更加實(shí)用。
4 結(jié) 語
采用動(dòng)態(tài)云模型編碼算法,通過高斯云產(chǎn)生器產(chǎn)生云模型的云滴;確定云模型編碼域以及編碼規(guī)則,動(dòng)態(tài)調(diào)整控制參數(shù);對(duì)圖像像素背景區(qū)域和目標(biāo)區(qū)分編碼,給出了增強(qiáng)過程,實(shí)驗(yàn)仿真顯示本文算法對(duì)圖像增強(qiáng)清晰,運(yùn)行時(shí)間較少,性能指標(biāo)較優(yōu)。為圖像增強(qiáng)提供一種新思路。
參考文獻(xiàn)(References):
[1] 李 尊,吳 謹(jǐn),劉 勁,等.FA-Criminisi快速圖像增強(qiáng)[J].液晶與顯示, 2015,30(2):353-358.
[2] 曹 偉,王華彬,石 軍,等.基于邊緣檢測(cè)加權(quán)引導(dǎo)濾波的指靜脈圖像增強(qiáng)算法[J].激光與光電子學(xué)進(jìn)展,2017,54(2):0210071-0210076.
[3] Mahfoud Hamidia,Abderrahmane Amrouche.Improved variable step-size NLMS adaptive filtering algorithm for acoustic echo cancellation[J].Digital Signal Processing,2016,49(2):44-55.
[4] Ehsan Ahmadi,Zohreh Azimifar,Maryam Shams.etal.Document image binarization using a discriminative structural classifier[J].Pattern Recognition Letters,2015,63(1):36-42.
[6] 吳慧琳,周激流,龔小剛.基于多子帶可逆細(xì)胞自動(dòng)機(jī)的二值圖像壓縮算法[J].計(jì)算機(jī)應(yīng)用研究,2013,30(5):1547-1550.
[7] Jayamol Mathews,Madhu S.NairAdaptive block truncation coding technique using edge-based quantization approach[J].Computers & Electrical Engineering,2015,43(4):169-179.
[8] Isa Ebtehaj,Hossein Bonakdari,Shahaboddin Shamshirband,etal.A combined support vector machine-wavelet transform model for prediction of sediment transport in sewer[J].Flow Measurement and Instrumentation,2016,47(3):19-27.
[9] 王 斌,胡遼林,薛瑞洋.基于退化轉(zhuǎn)換及可分離全變差模型的圖像增強(qiáng)[J].光學(xué)學(xué)報(bào),2014,34(10):1011002-1011007.
[10] Deng Wei hui,Wang Guo yin,Zhang Xue rui.A novel hybrid water quality time series prediction method based on cloud model and fuzzy forecasting[J].Chemometrics and Intelligent Laboratory Systems,2015,49(15):39-49.
[11] 劉玉超.一種自適應(yīng)的多粒度概念提取方法——高斯云變換[J].計(jì)算機(jī)工程與應(yīng)用,2015,51(9):1-8.
[12] 劉延華,陳國龍,吳瑞芬.基于改進(jìn)云模型的網(wǎng)絡(luò)信息系統(tǒng)可生存性預(yù)測(cè)[J].福州大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,42(4):524-530.
[13] 李 丹,王洪濤.基于云模型編碼算法的圖像消噪研究[J].圖學(xué)學(xué)報(bào),2014,35(4):643-647.
[14] 閻高偉,石 兵.一種結(jié)合云模型思想的粒編碼遺傳算法[J].計(jì)算機(jī)應(yīng)用與軟件,2014,31(11):269-274.
[15] 黃 茜,王少龍,徐道磊,等.云的自適應(yīng)閾值檢測(cè)方法[J].中國圖象圖形學(xué)報(bào),2012,17(8):960-965.
[16] Mehmet Sahinoglu,Sharmila Ashokan,Preethi Vasudev.Cost-Efficient Risk Management with Reserve repair Crew Planning in CLOUD Computing[J].Procedia Computer Science,2015,62(10):335-342.
[17] 文 樺,熊 娟.基于量子算法的圖像增強(qiáng)研究[J].量子光學(xué)學(xué)報(bào),2015,21(4):321-328.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19