貨物電梯PLC控制系統設計
2018-05-25 13:55:44蘇述鑫,張含葉
制造業自動化 2018年5期
關鍵詞:電梯
0 引言
隨著電商產業的發展,人們越來越喜歡網購,快遞員的任務日益繁重。目前快遞的運輸主要依靠人工進行,當工作量劇增的時候,快遞員有時候就會出現力不從心的現象,客戶也可能因為時間等客觀原因不能及時地拿到快遞。為了減少人力物力的消耗,盡量將快遞員從繁重的任務中解救出來,本文設計了貨物電梯PLC控制系統。
1 貨物電梯的結構及工作原理
1.1 貨物電梯的結構
貨物電梯的基本機械結構由拖動裝置、導向裝置、載運平臺、貨叉助力裝置和重量平衡裝置組成,如圖1所示[1]。

圖1 貨物電梯的基本結構
1)拖動裝置:拖動裝置的功能是輸出動力和傳遞動力,達到驅動貨物電梯的上升或下降,主要由蝸輪蝸桿直流電機、鋼絲繩和導向輪等組成。在載運平臺上安裝一動滑輪,一端經鋼絲繩與蝸輪蝸桿軸相連,另一端與平衡塊相連。在蝸輪蝸桿的帶動下,鋼絲繩上拉或下降。
2)導向裝置:導向裝置的主要功能是限制載運平臺和平衡塊的自由度,使載運平臺和平衡塊只能沿著各自的導軌作升降運動,而不發生擺動和振動。
3)載運平臺:三節阻尼靜音不銹鋼軌道安裝在載運平臺的底部,將貨物放在導軌上,當電動推桿推出信號時,貨物被推出。利用三節阻尼靜音不銹鋼軌道,避免了貨物與平臺底面的接觸,推送時避免了摩擦力,同時減少了噪音,起到助力作用。
4)貨叉助力裝置:步進電機滾珠絲桿滑臺安裝在載運平臺底板上,貨叉安裝在滑臺上。當步進驅動器發出脈沖時,步進電機得到脈沖開始轉動,滑臺(即貨叉)伸出,叉起物品。
5)重量平衡裝置:重量平衡裝置主要作用是維持貨物電梯運行的穩定性和安全性。
1.2 貨物電梯的工作原理
當貨物為大型件時,采用貨叉助力裝置。首先,按下貨叉伸出按鈕,PLC發出信號,使步進驅動器發出脈沖,步進電機得到信號并開始運轉,此時貨叉伸出,叉起物品;接著,按下樓層號按鈕,PLC發出信號,經電磁繼電器作用,直流電機正轉,上升到指定樓層時觸碰行程開關,電機停止運動,經PLC發出信號,步進電機驅動器得到信號發出脈沖,使步進電機反轉,此時貨叉收回,貨物放置在該樓層;然后,步進電機停止運轉,PLC發出信號,經電磁繼電器作用,直流電機反轉,貨叉下降,到達一樓時觸碰行程開關,電機停止運轉,即可運送下一批貨物。
當貨物為中、小型件時,宜采用載運平臺方式。首先,將貨物放入載運平臺,按下樓層號,經電磁繼電器作用,直流電機正轉,載運平臺上升,到達相應樓層,觸碰行程開關,電機停止運轉,PLC發出信號,電動推桿得到信號開始工作,將貨物退出載運平臺;接著,電動推桿停止運動,PLC又發出信號,經電磁繼電器作用,電動推桿收回,當收回到極限位置時停止;然后,PLC發出信號,經電磁繼電器作用,直流電機反轉,載運平臺下降并回到一樓,壓下一層行程開關,拖動電機停止轉動,工作完成。
2 控制系統設計
因為PLC具有可靠性高、壽命長、易于維護、接線少、編程簡單等優點,所以貨物電梯采用PLC控制。
2.1 控制系統組成
貨物電梯控制系統主要由PLC、步進電機、直流電機、電磁繼電器、行程開關等組成[2,3]。
2.2 PLC型號選擇[4]
本系統為四層樓的貨物電梯,采用按鈕對其進行控制,通過對I/O點數的計算和內存容量的估算來選擇合適的PLC機型。采用PLC對貨物電梯進行控制,裝置的上升和下降,由一臺電動機拖動,電動機正轉為貨物電梯的上升,反轉為貨物電梯的下降。載運平臺的推出機構由步進電機推動,步進電機正轉為推出貨物按鈕K5,反轉為收縮推桿按鈕K6。本裝置總共有四層,裝置外設有二至四層呼叫按鈕K1~K3,一到四層都設有行程開關ST1~ST4,以達到限位的目的。載運平臺的上升和下降,由拖動電機的接觸器KM1和KM2進行控制,裝置推出機構的推出和收縮由KM3和KM4控制。因此,輸入點共有11個,輸出點共有4個,總共15個。程序所占用的內存容量跟很多因素有關,因此,在程序設計之前只能對用戶的存儲容量進行大致估算,而不能得出具體的數值。
根據上述所得I/O點數以及估算的內存容量,故選擇臺達DVP-32ES。因為臺達DVP-32ES的輸入/輸出點數為16/8,足以滿足貨物電梯的控制要求。
2.3 I/0地址分配
貨物電梯控制系統具體的I/O分配如表1所示。
2.4 PLC外部接線圖
貨物電梯的PLC外部接線圖如圖2所示,裝置采用24V的直流電源,通過核算,可知此型號的PLC容量完全滿足所需的控制要求[5,6]。
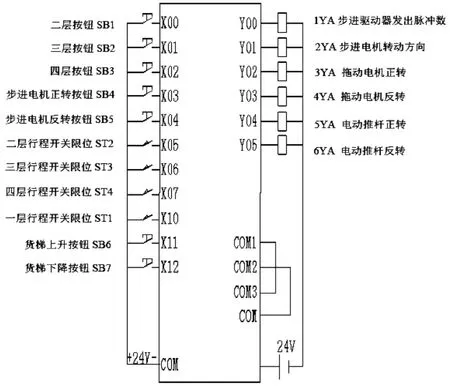
圖2 PLC外部接線圖
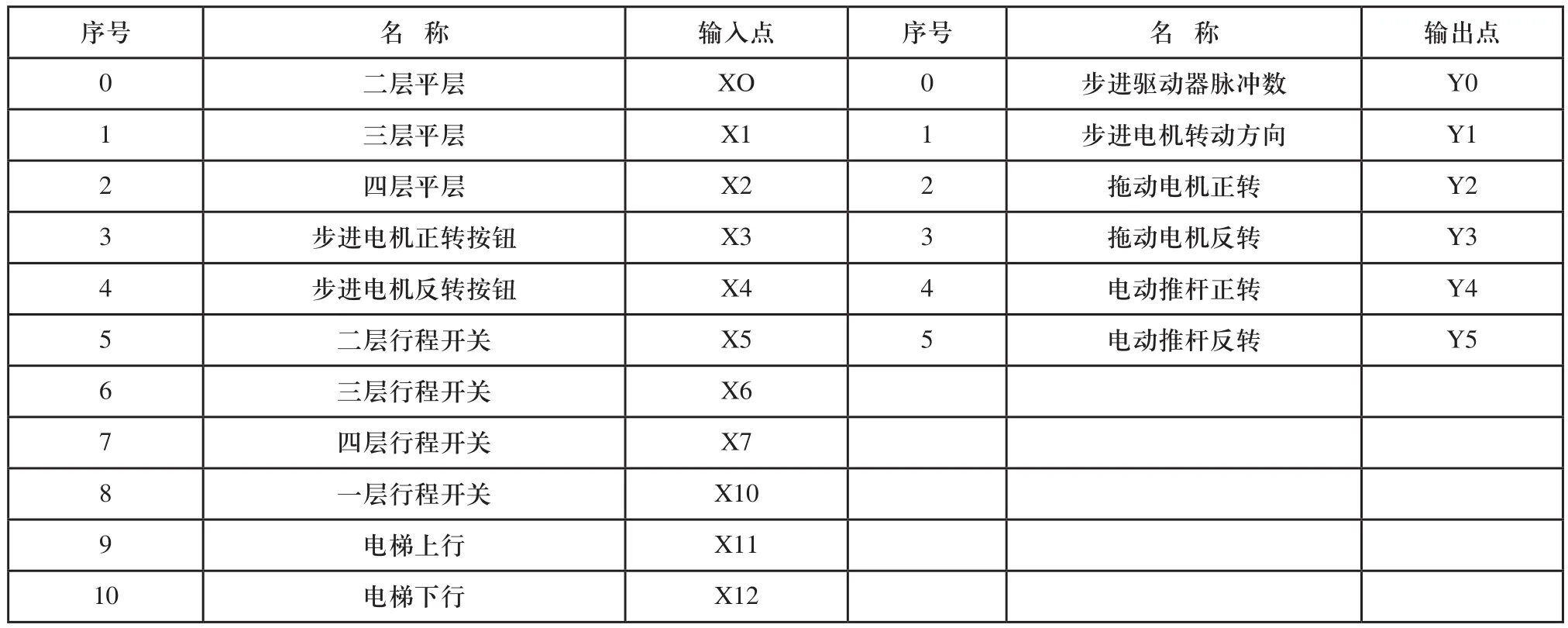
表1 I/O分配表
2.5 程序流程圖
貨物電梯的程序流程圖如圖3所示。

圖3 貨物電梯程序流程圖
3 結論
本文介紹了貨物電梯的基本結構及其工作原理,經過計算確定了PLC的型號,并對PLC控制器的I/O點數進行了分配,最后設計了PLC外部接線圖和程序流程圖。本文研制的貨物電梯不僅價格低,而且安全性高,可以大大減輕快遞員的勞動強度。
參考文獻:
[1]機材學院學子在全國第七屆機械創新設計大賽江西省賽區取得優異成績.http://www.jju.edu.cn/info/1048/51022.htm[EB/OL],2016-04-25.
[2]鄭學偉.基于PLC的電梯控制系統[D].天津:天津大學,2006.
[3]劉裁文.電梯控制系統[M].北京:電子工業出版社,1996.
[4]皮壯行.可編程序控制器的系統設計與應用實例[M].北京:機械工業出版社,2000.
[5]陳浩,劉振全,王漢.臺達PLC編程技術及應用案例[M].北京:化學工業出版社,2014.
[6]吳明亮,蔡夕忠.可編程控制器實訓教程[M].北京:化學工業出版社,2005.
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04
