手動擋車型擋位識別原理及標定研究
2018-05-28 01:39:48袁偉
汽車實用技術 2018年9期
袁 偉
(上汽大眾汽車有限公司,上海 201805)
前言
隨著物質條件的日益豐富和人民審美、評價觀念的提高,用戶對車輛駕駛性體驗和感受的要求也越來越高,關注點也越來越細化。車輛的駕駛性是指在任何天氣和駕駛條件下駕駛員在駕駛過程中對車輛加速、減速、換擋、竄動、抖動、沖擊、振動、噪聲等感受的舒適程度[1],也是在駕駛員對車輛做出操控后,車輛的動態響應能力、響應速率、響應時機等內容的綜合體現,它體現著汽車產品的市場定位與品牌基因,影響著消費者購買意愿,是提升產品競爭力的關鍵因素之一[2]。
駕駛性評價有客觀評價和主觀評價兩種方式。客觀評價的難點在于建立準確的評價準則,在復雜的駕駛工況中找出典型工況并做出分析,在這個領域 AVL公司開發的AVL-Drive應用比較廣泛[3];主觀評價的缺點在于不同的客戶駕駛性要求不一樣,客戶的真實需求難以被準確識別。由于駕駛性評價沒有統一的行業標準,而以消費者的期望滿意度為最終評價依據,因此一般是以主觀評價為主,客觀評價為輔。
1 駕駛性標定概述
在車輛的主要硬件如發動機、變速箱、底盤、輪胎、發動機管理系統(Engine Management System,以下簡稱EMS)控制策略等確定以后,通過對 EMS中駕駛性相關模塊的標定,可以優化車輛的駕駛性能,最大化的滿足客戶需求。
駕駛性標定的主要內容包括加速、勻速、減速(滑行及制動)、起步、發動機啟動/停機、換擋、怠速、快速松/踩油門、負荷轉換、巡航等,一般需要30個工作日,同時還需要經過“三高環境試驗”(高溫、高原、高寒)的極限驗證。由于駕駛性的主觀特性,因此一般需要進行經過粗標、評價、精細標定、再評價以及質量保證部門驗收等多個環節。駕駛性標定(行駛性能部分)的一般流程見圖1。如圖1所示,對于手動擋車型而言,擋位識別是駕駛性標定模塊的重要組成部分,正確的擋位識別為后續標定提供了必要條件。
手動擋擋位分為3個部分,分別是前進擋、空擋和倒擋。倒擋由倒擋開關進行識別,不需要進行特別的標定,本文主要針對前進擋和空擋的識別進行研究。

圖1 駕駛性標定一般流程
2 前進擋的擋位識別
2.1 識別原理
前進擋的擋位:Tra_numGear取決于修正后的車速和轉速的比值:V/N,其中轉速是發動機轉速或者變速箱輸出轉速,本文中采用發動機轉速。一般來說,車速和發動機轉速之間有如下關系[4]:

其中:V 表示車速,km/h;N 表示發動機轉速,rpm;U 表示輪胎周長,m;Rw 表示輪胎半徑,m;ig 表示變速箱系統的速比。
根據上述理論公式,車速和轉速信號正常的前提下,當離合器閉合時,V/N的比值反應了不同擋位下變速箱速比、驅動系統、輪胎直徑等的關系,且擋位一定時,V/N的值基本保持恒定,僅會在一個很小的范圍內波動,因此可以用來表征前進擋的擋位信號。以1擋為例,相對應的標定下限值Tra_rVn1L_C 和上限值Tra_rVn1H_C,當V/N在標定限值范圍內時,校驗通過后,即判定為1擋。需要指出的是,Tra_rVn(X)L_C和Tra_rVn(X)H_C的標定既需要覆蓋最大測量值,又需要與上、下擋位有交錯,即Tra_rVn(X)L_C需要小于 Tra_rVn(X-1)H_C,而 Tra_rVn(X)H_C需要大于Tra_rVn(X+1)L_C,如圖2所示。如表1是某手動擋車型擋位標定閾值。
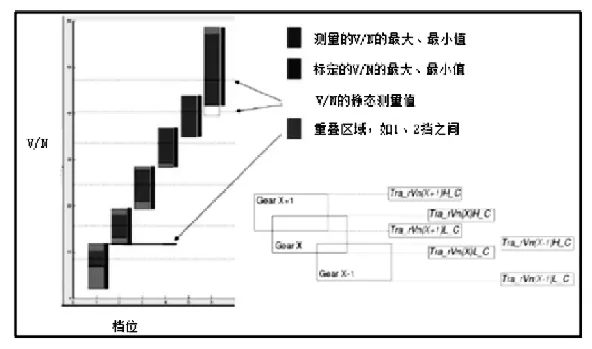
圖2 擋位識別原理
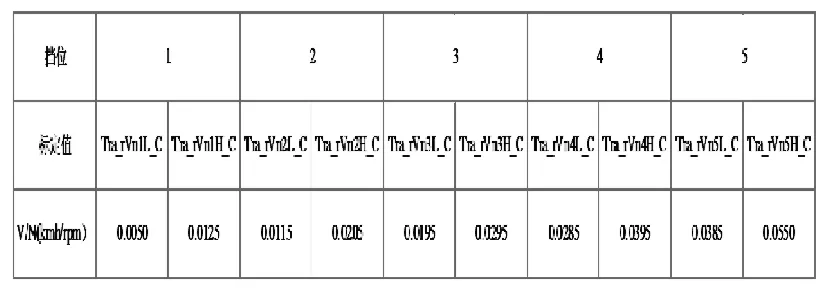
表1 某手動擋車型擋位標定閾值
2.2 標定流程
擋位識別標定的目的是測量每個擋位狀態下V/N的穩態值及最小、最大限值,標定流程如圖3所示。
在標定過程中,有以下幾點注意事項,1)試驗車輛要狀態良好、配置準確。比如正確輪胎規格及合適的胎壓、正確的變速箱速比、良好的離合器狀態、正確的儀表設置等;2)相關的測量變量,如V/N:PT_rTraV2N、擋位:Tra_numGear、發動機轉速:nmot_w、車速:vfzg_w、離合器信號:B_kuppl等,要用專業標定軟件INCA以10ms的采樣頻率測量;3)自由駕駛工況進行擋位識別檢查時,要覆蓋動力總成抖動最嚴重的工況,如急加速、急剎車等。
3 空擋的識別及標定
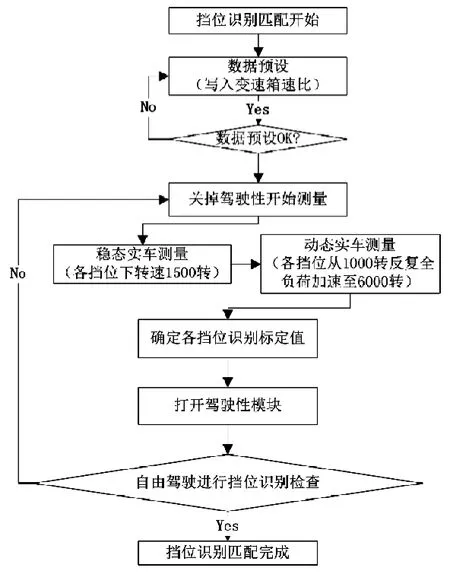
圖3 前進擋擋位識別標定流程
空擋狀態時駕駛性相關模塊是關閉的,如果空擋識別錯誤,會嚴重影響車輛的行駛性能,給客戶帶來負面的駕駛感受,影響用戶滿意度,因此對于手動擋車型,空擋的正確判定也非常重要。離合器踩下時,由離合器開關信號狀態自然識別為空擋;而當離合器沒有踩下時,無論是在行駛還是怠速狀態,EMS也需要能正確的識別空擋擋位。
空擋的識別有兩種方式,1)對于不裝備智能啟停系統(StartStop)的車輛,空擋由EMS系統通過嚴格的標定進行識別;2)對于裝備智能啟停系統的車輛,由空擋傳感器(Neutral gear sensor)識別。
3.1 EMS標定識別空擋
通過 EMS標定識別空擋的依據同樣是車速和轉速的比值V/N,從前述可知,離合器閉合時,擋位一定的情況下,V/N的值會在一個很小的范圍內波動,那么當掛到空擋后,比值自然會偏離這個固定的范圍。如圖4所示的測量信號,當車輛固定在3擋行駛時,V/N的比值信號:PT_rTraV2N固定在 0.0247((km/h)/rpm)左右,當掛到空擋滑行后,PT_rTraV2N迅速偏離了原來的固定值,因此通過對PT_rTraV2N的門檻值合理標定,可以用以識別空擋。如表3是某車型3擋的空擋標定閾值,當V/N的比值超出空擋對應的閾值后,經過一定的延時和安全校驗,即可以判定為空擋。
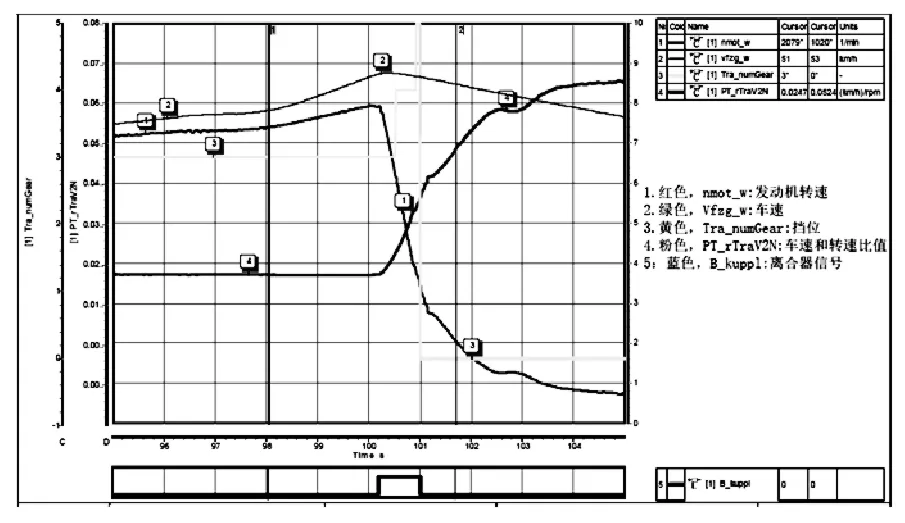
圖4 測量信號
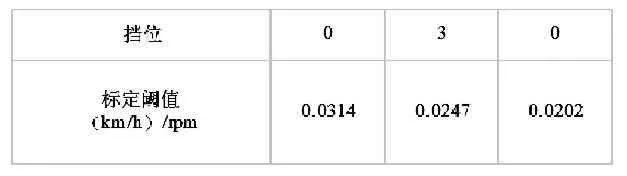
表3 某車型3擋的空擋標定閾值
空擋的標定方法與上述前進擋的標定類似,一般先穩定油門踏板以1500rpm穩態行駛,將每個擋位測量的V/N填入表中的對應固定擋位;2)粗標每個擋位左右的空擋閾值,間隔窗口一般在 3%-25%,偏向低擋位方向間隔大,偏向高擋位方向間隔小;3)關掉駕駛性模塊,參照上述判擋的動態測量方法,精細調整門檻值,注意兼顧相鄰擋位的最高和最低前進擋擋位閾值。
采用EMS標定識別空擋的方法減少了傳感器的應用,降低了成本;缺點在于對于標定質量的要求比較高,如果標定不精細,閾值偏大或者偏小,容易出現識別延遲或者失誤,因此一般較多應用于低端配置車型。
3.2 空擋傳感器識別空擋
智能啟停系統是指EMS根據車輛的運行狀態,當自動停機條件滿足時,車輛自動熄火,以減少油耗和排放,它是微混合動力技術,適用于比較擁堵的城市工況。當前為滿足日益嚴格的油耗和排放國家標準要求,智能啟停系統的裝備率已經越來越高。
以遇到紅燈停車為例,裝備啟停系統的手動擋車型停機過程見圖5。由圖5可見,一方面正確識別空擋是駕駛員停機需求的重要組成部分,空擋識別的準確與否,關系到了智能啟停系統運行的準確性和安全性,如避免在擋位時發動機啟動而產生的竄車事故等;另一方面空擋傳感器的位置信號與離合器位置信號相結合,可以用來判斷駕駛員的起步意圖,通過對EMS中起步和目標怠速模塊的標定,可以適當提高發動機此時的怠速轉速和輸出扭矩,改善起步性能,這對裝備小排量增壓發動機的手動擋車型十分有益。
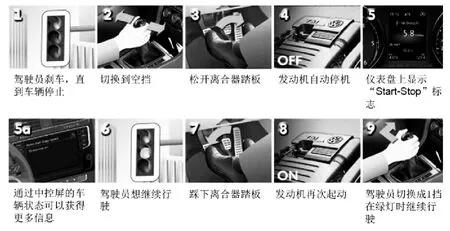
圖5 手動擋車型停機、重啟過程
空擋傳感器有接觸機械式和非接觸式兩種[5]。
接觸機械式傳感器對制造和裝配的精度要求比較高,故障率也較高,容易造成輸出錯誤的空擋信號,造成啟停工作不正常,因此一般應用比較少。
非接觸式傳感器基于霍爾效應原理進行檢測,工作過程無機械接觸,不存在磨損,壽命長。非接觸式傳感器根據安裝位置可分為內置空擋傳感器(安裝于變速器殼體內)和外置空擋傳感器(安裝在選換擋搖臂上)[6]。本文主要介紹采用內置方案的空擋傳感器,如圖6所示,空擋傳感器裝在變速箱殼體上,傳感器對準換擋軸上磁鐵感應塊(粉色區域),磁鐵感應塊為不規則形狀,當換擋軸進行轉動時,傳感器與之的相對位置發生變化,霍爾芯片感應的磁場強度也發生變化,相應輸出不同的電信號,這可以作為判斷當前擋位處于空擋還是在擋狀態的基礎。
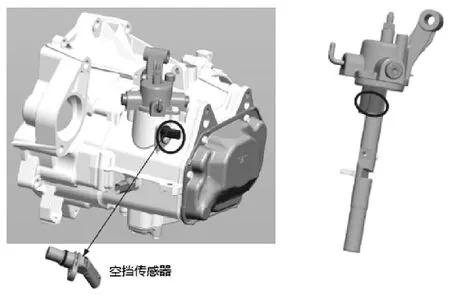
圖6 內置式空擋傳感器安裝示意圖
空擋傳感器與ECU內部接口電路結合,輸出信號可以是analogue、PWM 、SENT等多種形式,歐洲車型普遍都采用PWM信號的配置方案。當擋位不同時,PWM信號對應的占空比也發生變化,如下表4是某車型各擋位輸出的PWM信號及對應電壓值,可見在空擋、奇數擋及倒擋、偶數擋的輸出信號完全不同,具有明顯的差異。空擋傳感器輸出的PWM信號頻率是一定的,一般為125Hz,傳感器出現故障時,信號頻率也會發生變化,可以實現傳感器的自診斷功能,提高空擋識別的安全性。
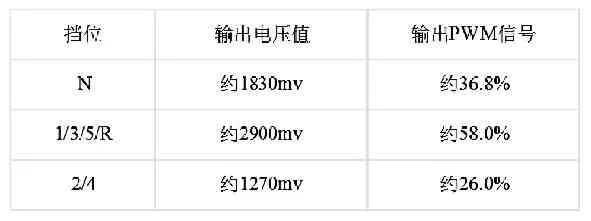
表4 某車型各擋位空擋傳感器輸出信號
作為智能啟停系統相關的安全部件,空擋傳感器的精準識別非常重要,目前執行的安全法規為ISO-DIS 26262。根據法規規定,由于空擋傳感器可能導致非人為的發動機啟動/停止,必須達到ASIL ( Automotive Safety Integrity Level)B 級[5],同時在制造和裝配過程中,空擋傳感器的信號不可避免的存在散差,因此為保證空擋傳感器識別的準確性,新車在出廠前,必須進行自學習來確認空擋傳感器的可靠性。
總的來說,由于空擋傳感器具有識別精準、可靠性好,可自診斷的優點,且已經是比較成熟的技術,可以實現模塊化生產,以及傳感器對應的電路成本也不是很高,因此是一種較好的空擋識別解決方案。
4 結束語
1)駕駛性能在車輛綜合評測中的比重越來越大,在一定程度上影響著客戶的購買意愿;在實際工作中也發現駕駛性相關的售后抱怨也越來越多,因此做好相關的標定工作十分重要。
2)手動擋車型的擋位識別是進行駕駛性標定的基礎之一,前進擋的擋位識別的原理比較簡單,本文重點介紹了相關的標定方法、標定流程以及標定過程中的注意事項,具有一定的實踐指導意義。
3)空擋的識別是擋位識別的重要組成部分,本文也介紹了常見的空擋識別方法,并針對現在應用比較廣泛的空擋傳感器進行了詳細研究。
參考文獻
[1] 項本學.車輛駕駛性與發動機標定關系研究[A].公路與汽運,2018(1).
[2] 章桐,劉普輝.汽車燃油經濟性及動力性與駕駛性客觀評價體系[A].同濟大學學報(自然科學版),2015(12).
[3] 司楊,陳昕.駕駛質量開發綜述 [A].公路與汽運,2015(5).
[4] 趙況,李瑞珂.基于BOSCH ME7系統的手動擋車型判擋及防抖動功能的研究[B].裝備制造技術,2015(7).
[5] 鄭立朋,柳見喜,徐雷.手動變速器空擋位置傳感器在智能啟停系統中的應用[A].汽車技術,2014(4).
[6] 鄧慶斌,王曉娟,王麗萍,孟德偉.基于起停系統的變速器空擋位置傳感器開發[A].汽車技術,2014(9).
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
鴨綠江(2021年35期)2021-04-19 12:24:18
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51