基于斷裂行為的水下機(jī)器人抗壓疲勞損傷測(cè)試?
2018-05-29 11:50:42楊沖
艦船電子工程 2018年5期
楊 沖
(昆明船舶設(shè)備研究試驗(yàn)中心 昆明 650051)
1 引言
隨著水下探測(cè)技術(shù)和人工智能技術(shù)的發(fā)展,水下機(jī)器人(Underwater Autonomous Vehicle,UAV)技術(shù)不斷成熟,人們采用水下機(jī)器人進(jìn)行水下目標(biāo)檢測(cè)、水下智能探測(cè)、水下開采作業(yè)等,有效提高了水下作業(yè)的效率的同時(shí),降低了水下作業(yè)的風(fēng)險(xiǎn)。水下機(jī)器人作為一種人工智能體和主動(dòng)探測(cè)制導(dǎo)控制系統(tǒng),集機(jī)械、控制、信息處理以及水下避障等學(xué)科為一體,在軍事領(lǐng)域中同樣表現(xiàn)出廣闊的應(yīng)用價(jià)值。水下機(jī)器人在軍事應(yīng)用中,主要表現(xiàn)為水下航行器跟蹤識(shí)別、聲吶信號(hào)探測(cè)、水下蛙人以及運(yùn)載等,通過(guò)自主航行、制導(dǎo)控制、信號(hào)處理以及計(jì)算機(jī)智能控制系統(tǒng),實(shí)現(xiàn)水下機(jī)器人的探測(cè)、跟蹤、識(shí)別和控制[1]。水下機(jī)器人由于長(zhǎng)期工作在大深度的海水中,海水的壓力較大,鹽度較高,腐蝕性較強(qiáng),容易導(dǎo)致機(jī)器人斷裂,需要進(jìn)行水下機(jī)器人的抗壓疲勞損傷優(yōu)化測(cè)試,提高水下機(jī)器人的抗拉強(qiáng)度,避免機(jī)械斷裂,研究相關(guān)的水下機(jī)器人抗壓疲勞測(cè)試方法在提高機(jī)械人強(qiáng)度方面具有重要意義。
傳統(tǒng)方法中,對(duì)機(jī)器人抗壓疲勞損傷測(cè)試及機(jī)械設(shè)計(jì)方法主要采用數(shù)值模擬分析方法和統(tǒng)計(jì)分析方法[2],根據(jù)機(jī)械強(qiáng)度的屈曲關(guān)系進(jìn)行水下機(jī)器人的抗拉強(qiáng)度數(shù)值分析,實(shí)現(xiàn)對(duì)機(jī)器人機(jī)械剩余承載力模擬,從而指導(dǎo)機(jī)器人的機(jī)械設(shè)計(jì)和制造水平,具有一定的效果,但是隨著機(jī)器人作業(yè)海水深度的增大,不能有效模擬機(jī)器人的疲勞損傷的數(shù)值關(guān)系,在大深度的海水工作環(huán)境下機(jī)器人容易出現(xiàn)斷裂行為,且對(duì)水下機(jī)器人承載動(dòng)力學(xué)分析的準(zhǔn)確性不好[3]。針對(duì)上述問(wèn)題,本文提出一種基于斷裂行為的水下機(jī)器人抗壓疲勞損傷測(cè)試方法。首先進(jìn)行水下機(jī)器人抗壓疲勞損傷系統(tǒng)的總體結(jié)構(gòu)分析,構(gòu)造水下機(jī)器人受力參量的估計(jì)模型,建立水下機(jī)器人機(jī)械荷載力學(xué)方程。然后采用斷裂行為評(píng)估模型進(jìn)行水下機(jī)器人抗壓疲勞的力學(xué)估計(jì)和參量可靠性分析,建立水下機(jī)器人的機(jī)械流場(chǎng)應(yīng)力模型,實(shí)現(xiàn)水下機(jī)器人抗壓優(yōu)化設(shè)計(jì)。最后進(jìn)行了計(jì)算機(jī)仿真測(cè)試分析,展示了本文方法在提高水下機(jī)器人抗壓和抗斷裂行為方面的優(yōu)越性。
2 抗壓疲勞損傷的總體結(jié)構(gòu)及受力約束參量
2.1 水下機(jī)器人抗壓疲勞損傷測(cè)試的總體結(jié)構(gòu)分析
本文研究水下機(jī)器人抗壓疲勞損傷測(cè)試系統(tǒng)結(jié)構(gòu)分析,需要分析水下機(jī)器人在海水下的機(jī)械屈曲關(guān)系和剩余抗拉強(qiáng)度的數(shù)值分析模型,在CAD/CAM平臺(tái)上進(jìn)行水下機(jī)器人抗壓疲勞損傷系統(tǒng)的總體結(jié)構(gòu)分析,機(jī)器人的抗壓疲勞測(cè)試的CAD/CAM主模塊包括了機(jī)器人的CAD造型設(shè)計(jì)、機(jī)械強(qiáng)度的應(yīng)力生成模擬、機(jī)器人機(jī)械加工的進(jìn)刀曲率控制以及后置處理等部分[4]。以機(jī)器人在海水下的屈服響應(yīng)、疲勞應(yīng)力、抗拉能力、剪力、抗壓力和受壓區(qū)應(yīng)變之間的關(guān)系為約束參量,建立機(jī)器人機(jī)械設(shè)計(jì)和抗壓疲勞測(cè)試的機(jī)械動(dòng)態(tài)分析模型,在五軸坐標(biāo)系中進(jìn)行水下機(jī)器人的加工仿真和后置處理[5],根據(jù)上述分析,得到水下機(jī)器人抗壓疲勞損傷測(cè)試系統(tǒng)的總體結(jié)構(gòu)框圖如圖1所示。
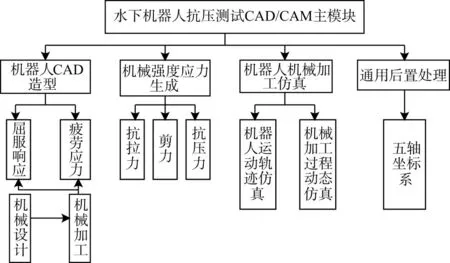
圖1 水下機(jī)器人抗壓疲勞測(cè)試的總體結(jié)構(gòu)模型
根據(jù)圖1所示的水下機(jī)器人抗壓疲勞損傷測(cè)試的總體結(jié)構(gòu)模型,進(jìn)行水下機(jī)器人抗壓疲勞測(cè)試的數(shù)值分析和參數(shù)模型構(gòu)造,假設(shè)機(jī)器人的主材直徑為34mm,構(gòu)件的整體截面厚度11.23mm,轉(zhuǎn)矩為φ60.3×6.3,設(shè)計(jì)壓力 12MPa,工作環(huán)境溫度為-50℃~50℃,能夠經(jīng)受高溫高壓下的海水壓力沖擊。采用非約束剛度彈塑性模型構(gòu)造水下機(jī)器人的構(gòu)件有限元分布模型,得到水下機(jī)器人在海水高壓徐變和瞬態(tài)熱效應(yīng)作用下的疲勞測(cè)試應(yīng)力關(guān)系,分析機(jī)器人的抗壓力學(xué)性能與海水深度和荷載的作用關(guān)系。
2.2 水下機(jī)器人受力參量的估計(jì)模型
在上述進(jìn)行了水下機(jī)器人抗壓疲勞損傷測(cè)試總體結(jié)構(gòu)分析和原理介紹的基礎(chǔ)上,構(gòu)造水下機(jī)器人受力參量的估計(jì)模型,建立水下機(jī)器人機(jī)械荷載力學(xué)方程,水下機(jī)器人在五軸坐標(biāo)系中表現(xiàn)為一個(gè)連桿結(jié)構(gòu)模型[6~8],各支鏈末端構(gòu)件的彈性模量T和剩余承載力V分別為
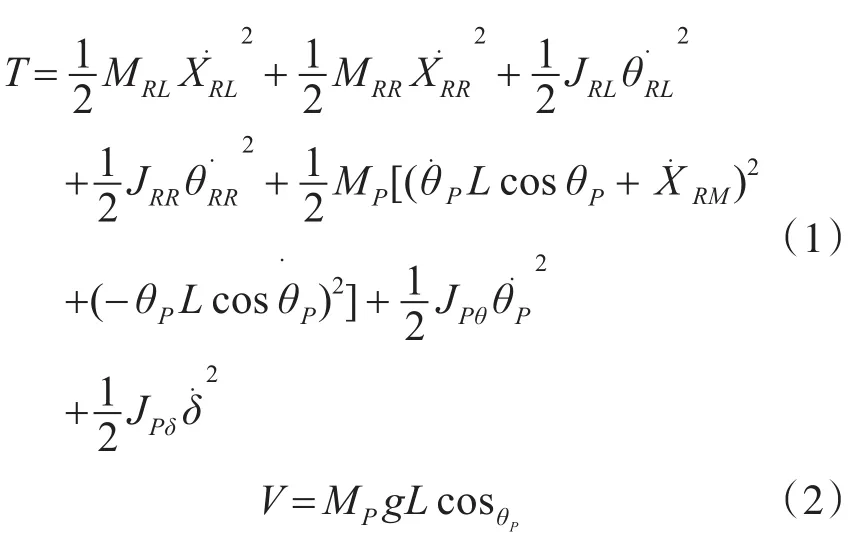
在零勢(shì)能面計(jì)算水下機(jī)器人三平移并聯(lián)機(jī)構(gòu)的應(yīng)力擬合值:

預(yù)先設(shè)定水下機(jī)器人結(jié)構(gòu)強(qiáng)度,水下機(jī)器人抗水下壓強(qiáng)的強(qiáng)度等級(jí)為C60,由此得到水下機(jī)器人機(jī)械荷載力學(xué)方程:
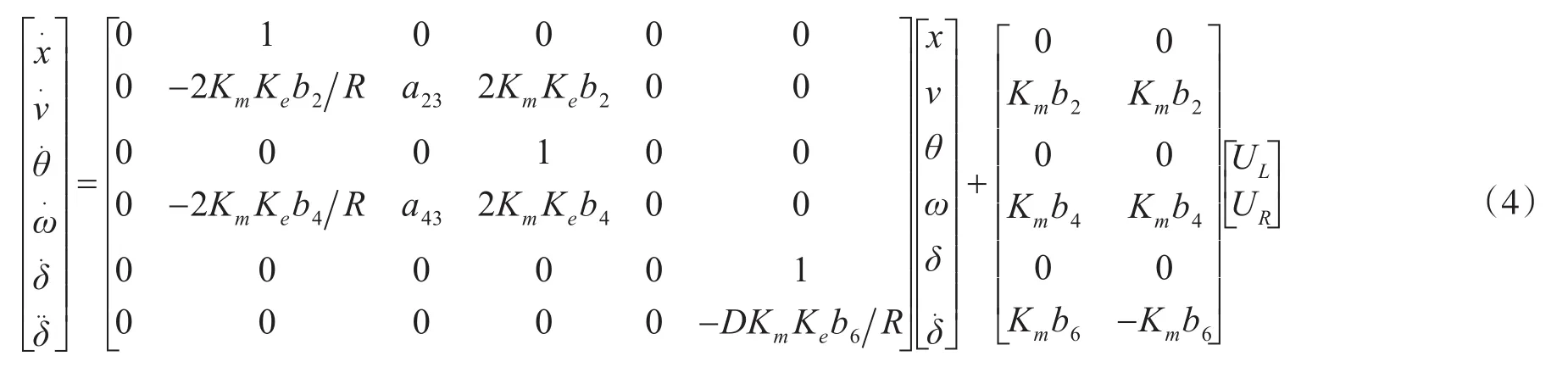
其中,每條支鏈上水下機(jī)器人黏滯阻尼狀態(tài)參數(shù)為與狀態(tài)是互不相關(guān)的,由此得到水下機(jī)器人系統(tǒng)的機(jī)械彈性荷載力學(xué)方程描述為
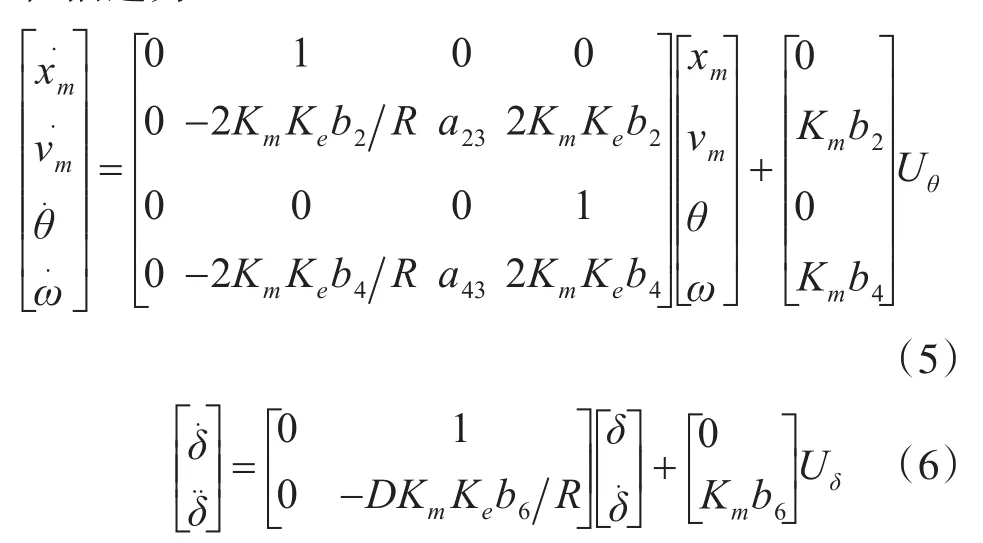
采用擬線性評(píng)估方法估計(jì)水下機(jī)器人在海水壓力作用下的機(jī)械剩余抗拉強(qiáng)度,在此基礎(chǔ)上進(jìn)行機(jī)器人的斷裂行為評(píng)估和抗壓疲勞損傷測(cè)試。
3 機(jī)器人抗壓疲勞損傷評(píng)估模型優(yōu)化
3.1 抗壓疲勞的力學(xué)估計(jì)和參量可靠性分析
在CAD/CAM平臺(tái)上進(jìn)行水下機(jī)器人抗壓疲勞損傷系統(tǒng)的總體結(jié)構(gòu)分析,構(gòu)造水下機(jī)器人受力參量的估計(jì)模型的基礎(chǔ)上,進(jìn)行水下機(jī)器人的抗壓疲勞的力學(xué)估計(jì)和參量可靠性分析[9],本文提出一種基于斷裂行為的水下機(jī)器人抗壓疲勞損傷測(cè)試方法。給定結(jié)構(gòu)降耦構(gòu)型的誤差參考量fx(X,t),fθ(X,t)為不確定的有界函數(shù),在并聯(lián)機(jī)構(gòu)的拓?fù)浣Y(jié)構(gòu)中,機(jī)器人抗疲勞斷裂的安全允量條件下,其解耦構(gòu)型的估計(jì)函數(shù)分別為有如下關(guān)系:
根據(jù)各支鏈在動(dòng)/靜平臺(tái)之間的載荷比值推薦值,引入兩個(gè)初始裂紋長(zhǎng)度,隨著試樣的變形,在海水中機(jī)器人抗壓疲勞損傷的演化規(guī)律分量分別描述為
取 sinθp=θp,cosθp=1,每次改變尺寸參數(shù)時(shí),以載荷分離最大和斷裂可靠性評(píng)價(jià)最優(yōu)為目標(biāo)優(yōu)化參考模型,借助有限元模擬計(jì)算2D面-面接觸對(duì)的剛性強(qiáng)度,為
式 中 ,分別為抗壓疲勞的力學(xué)估計(jì)參量、加載線位移和接觸剛度,對(duì)上述多目標(biāo)優(yōu)化模型進(jìn)行約束進(jìn)化求解。
3.2 機(jī)械流場(chǎng)應(yīng)力模型和抗壓疲勞損傷測(cè)試優(yōu)化
在機(jī)器人斷裂行為約束下,根據(jù)材料應(yīng)變硬化指數(shù)構(gòu)建機(jī)械流場(chǎng)應(yīng)力模型[10],得到抗壓疲勞損傷的約束進(jìn)化方程描述為
式中,z1,z2是斷裂韌度約束參數(shù),y為海水深度,z3是規(guī)則化載荷變量,β1,β2,β3,δ,b是可調(diào)參數(shù)。在給出了載荷分離參數(shù)的條件下[11],得到裂紋終止點(diǎn)的誤差修正方程式表示為

式中,是規(guī)則化處理的數(shù)據(jù)點(diǎn);kp,kd是比例系數(shù)和微分系數(shù)。通過(guò)斷裂行為評(píng)估,得到水下機(jī)器人抗壓疲勞測(cè)試的動(dòng)態(tài)評(píng)估方程:
式中,yi是實(shí)時(shí)裂紋長(zhǎng)度是超越行程的“動(dòng)態(tài)耦合的參數(shù)”,bij是加載線位移,考慮斷裂韌度存在熱誤差影響[12],通過(guò)曲率修正得到機(jī)器人抗壓疲勞評(píng)估的應(yīng)力擬合解析量算關(guān)系:
建立動(dòng)量守恒方程為

式中:

由于卸載柔度的變化與裂紋長(zhǎng)度具有定常性,故:
忽略卸載柔度的擾動(dòng)影響以及水下機(jī)器人自身的重力作用,有

由此得到水下機(jī)器人抗壓疲勞測(cè)試的彈性部分和塑性部分的湍流方程為k-ε方程,表示為

其中:

綜上分析,在大深度的液態(tài)介質(zhì)環(huán)境下建立水下機(jī)器人的機(jī)械流場(chǎng)應(yīng)力模型,實(shí)現(xiàn)水下機(jī)器人抗壓優(yōu)化設(shè)計(jì)。
4 仿真實(shí)驗(yàn)與性能測(cè)試分析
為了測(cè)試本文方法在實(shí)現(xiàn)水下機(jī)器人抗壓疲勞測(cè)試和機(jī)械強(qiáng)度優(yōu)化設(shè)計(jì)中的應(yīng)用性能,進(jìn)行仿真實(shí)驗(yàn)實(shí)驗(yàn)建立在CAD/CAM數(shù)控仿真軟件基礎(chǔ)上,采用Matlab R2010b仿真軟件進(jìn)行數(shù)值實(shí)驗(yàn)分析,機(jī)器人的主體加工材料為20CrMnTi,規(guī)格φ60.5×6.8,海水湍流參數(shù)取值分別為:C1ε=1.44 ,C2ε=1.92,Cμ=0.09,σk=1.0,σε=1.3。切齒深度φ取值1.0mm,結(jié)合塑性因子Ke=0.5732Vs/rad,卸載柔度Jp=0.804(1±0.5)kg·m2,材料應(yīng)變硬化指數(shù)為1.25,根據(jù)上述仿真環(huán)境和參量設(shè)定,進(jìn)行水下機(jī)器人的抗壓疲勞測(cè)試,得到水下機(jī)器人的抗壓疲勞測(cè)試的等高線圖如圖2所示,機(jī)器人斷裂行為的有限元分布云圖如圖3所示。

圖2 水下機(jī)器人的抗壓疲勞測(cè)試的等高線圖

圖3 水下機(jī)器人斷裂行為的有限元分布云圖
分析圖2和圖3結(jié)果得知,采用本文方法進(jìn)行機(jī)器人抗壓疲勞測(cè)試和斷裂行為評(píng)估,水下機(jī)器人斷裂行為的有限元分布較為平滑,說(shuō)明該設(shè)計(jì)方法能有效提高水下機(jī)器人強(qiáng)度,克服疲勞損傷,為了對(duì)比不同方法的性能,采用本文方法和傳統(tǒng)的構(gòu)件耦合方法進(jìn)行水下機(jī)器人的抗壓設(shè)計(jì),得到疲勞損傷測(cè)試誤差對(duì)比如圖4所示。
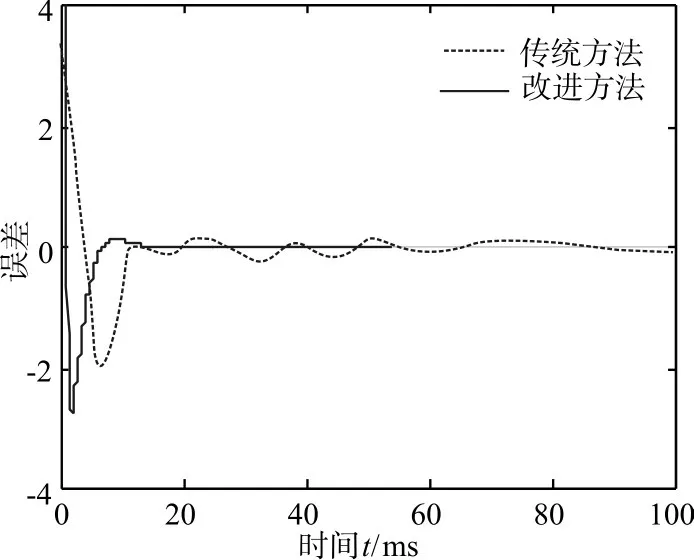
圖4 誤差性能測(cè)試
分析圖4結(jié)果得知,本文方法進(jìn)行水下機(jī)器人機(jī)械性能測(cè)試的誤差較小,采用本文設(shè)計(jì)方法能增大水下機(jī)器人工作海深,抗疲勞損傷性能較好。
5 結(jié)語(yǔ)
進(jìn)行水下機(jī)器人的抗壓疲勞損傷優(yōu)化測(cè)試,提高水下機(jī)器人的抗拉強(qiáng)度,避免機(jī)械斷裂,本文提出一種基于斷裂行為的水下機(jī)器人抗壓疲勞損傷測(cè)試方法。構(gòu)造水下機(jī)器人受力參量的估計(jì)模型,建立水下機(jī)器人機(jī)械荷載力學(xué)方程,采用斷裂行為評(píng)估模型進(jìn)行水下機(jī)器人抗壓疲勞的力學(xué)估計(jì)和參量可靠性分析,在大深度的液態(tài)介質(zhì)環(huán)境下建立水下機(jī)器人的機(jī)械流場(chǎng)應(yīng)力模型,實(shí)現(xiàn)水下機(jī)器人抗壓優(yōu)化設(shè)計(jì)。研究表明,采用本文模型進(jìn)行水下機(jī)器人的機(jī)械結(jié)構(gòu)應(yīng)力場(chǎng)分析和抗壓疲勞損傷測(cè)試,能有效提高水下機(jī)器人強(qiáng)度,增大水下機(jī)器人工作海深,抗疲勞損傷性能較好,在水下機(jī)器人的機(jī)械性能改進(jìn)設(shè)計(jì)中具有很好的應(yīng)用價(jià)值。
參考文獻(xiàn)
[1]鄒勝宇,劉振,高海波,等.基于干擾力時(shí)間積分的懸吊漂浮物隨動(dòng)控制方法[J].機(jī)器人,2015,37(1):1-8,16.
[2]陸興華,陳銳俊,池坤丹.引入人體紅外釋熱探測(cè)的救援機(jī)器人感知系統(tǒng)[J]. 艦船電子工程,2016,36(3):151-155.
[3]沈惠平,李菊,王振,孟慶梅,戴麗芳.基于結(jié)構(gòu)降耦和運(yùn)動(dòng)解耦的并聯(lián)機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)優(yōu)化及其性能改善[J].機(jī)械工程學(xué)報(bào),2017,53(19):176-186.
[4]Liu Junyan,Liu Yang,Wang Fei,et al.Study on proba?bility of detection(POD)determination using lock-in ther?mography for nondestructive inspection(NDI) of CFRP composite materials[J].Infrared Physics&Technology,2015(71):448-456.
[5]Kumar A,Pooja R,and Singh G K.Design and perfor?mance of closed form method for cosine modulated filter bank using different windows functions[J].International Journal of Speech Technology,2014,17(4):427-441.
[6]安慰寧,張福民,吳翰鐘,曲興華.一種基于飛秒光頻梳頻域干涉的絕對(duì)測(cè)距方法[J].儀器儀表學(xué)報(bào),2014,35(11):2458-2465.
[7]蘇輝,李志平,段延敏,等.基于摻鎂周期極化鈮酸鋰晶體的內(nèi)腔單共振連續(xù)可調(diào)諧光參量振蕩器[J].光學(xué)精密工程,2013,21(6):1404-1409.
[8]王霞,張明陽(yáng),陳振躍,等.主動(dòng)偏振成像的系統(tǒng)結(jié)構(gòu)概述[J]. 紅外與激光工程,2013,42(8):2244-2246.
[9]任朝暉謝吉祥周世華聞邦椿.斜齒輪-轉(zhuǎn)子-軸承彎扭軸耦合振動(dòng)特性分析[J].機(jī)械工程學(xué)報(bào),2015,51(15):75-89.
[10]李俊華,劉明哲,唐躍峰,等.火災(zāi)后型鋼混凝土梁受力性能試驗(yàn)研究[J].土木工程學(xué)報(bào),2011,44(4):84-90.
[11]閆清東,穆洪斌,魏巍,等.雙循環(huán)圓液力緩速器葉形參數(shù)優(yōu)化設(shè)計(jì)[J].兵工學(xué)報(bào),2015,36(3):385-390.
[12]馬雪.基于FPGA嵌入式設(shè)計(jì)的水聲信號(hào)采集系統(tǒng)[J].艦船電子工程,2017,37(3):135-139.
[13]陸興華,詹世尉,余文權(quán).最陡下滑軌跡中無(wú)人機(jī)的航向校正控制算法[J].計(jì)算機(jī)與數(shù)字工程,2016,44(12):2370-2374,2425.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
