淺談汽車ABS滑移率的模糊滑模控制
2018-05-31 02:28:14朱永
時代汽車 2018年2期
朱永
廣州市高級技工學校 廣東省廣州市 510440
1 引言
汽車防抱死制動系統(ABS)可以在極限情況下維持車輪和整體車輛的穩定性,是保證汽車安全的一個重要系統。汽車ABS系統的核心是控制系統,ABS系統的制動性能受控制效果的影響非常巨大,其中目前最常用的控制方法是基于滑移率的控制方法。在進行ABS系統設計的時候,常常會提到最佳滑移率的概念。所謂的最佳滑移率,就是指汽車輪胎附著系數最大時的滑移率,汽車的輪胎一直處于最佳滑移率是最理想的狀態,但是汽車在實際行駛的時候會受到非常多的因素的影響,所以汽車制動系統也是一個非線性的不確定的復雜系統,而傳統的控制方法基本都是建立在線性系統的基礎上,所以控制效果不好。目前國內外的很多學者紛紛提出很多新型的控制理論。
目前國際上有非常多的控制方法來實現對汽車ABS系統滑移率的控制。下面我們就來詳細分析一下國際上常用的滑移率控制方法。邏輯門限值控制方法是一種最簡單的控制方法,但是在測定門限值的時候要進行大量的試驗才能準確測量,并且使用該控制方法會增加系統的調試難度,而且控制準確度也不是最高的,使用邏輯門限制控制方法開發的系統適用性較差,僅僅在小范圍內具有很強的適用性。PID控制方法也是一種簡單的控制犯法,當使用最佳滑移率作為參考滑移率的時候,PID控制系統的控制效果非常好,但是在實際的汽車行駛過程中,路面情況是會不斷發生變化的,隨之而來的是汽車最佳滑移率的變化,但是參考滑移率是不能隨意變動的,這就使得PID控制系統在實際運用的過程中控制效果較差。而且,PID控制系統在調整參數的時候流程非常復雜,難度也比較大,所以PID控制系統在ABS系統中也很少使用。模糊控制方法對參數變化的適應性較強,外界干擾對系統的影響也比較小,但是和其他控制系統相比,模糊控制方法的響應速度要慢于其他控制系統,而且模糊控制系統質量的好壞是與設計者的能力直接掛鉤的,這就導致不同的模糊控制系統之間存在很大的性能差異。而且,模糊控制系統對路面特征的識別效果較差,這導致模糊控制系統不能在路況變化之后及時的變更系統的參考滑移率。滑模變結構控制系統也是當前國際上一個非常流行的控制方法,和其他的控制方法相比,滑模變結構控制系統的響應速度更快,但是對滑模參數的依賴程度較高。而且滑模變結構控制系統缺乏相應的理論支持,控制效果的好壞受設計者影響非常嚴重,與模糊控制系統相同,滑模變結構控制系統也不能識別路面特征。而自適應系統可以實現對路面特征的識別,而且可以根據路面狀況的變化而進行自動調整,不斷的修正參考滑移率,控制效果要遠遠好于上述的幾種控制系統。
在實際設計的使用,并不一定要采用單一的控制算法,可以充分利用不同控制算法的特點,將幾種控制算法結合起來。目前國際上已經有很多專家學者開始將幾種控制方法結合起來。比如模糊PID控制算法、自適應模糊控制算法、模糊滑塊控制算法,這些都是目前國際上非常流行的結合控制方法。這些結合控制算法都有其獨特的優點和缺點,本人在經過研究之后,提出一種新的組合控制算法——ABS自適應模糊滑模控制算法,這種算法繼承了自適應控制算法的有點,在不同的路面特征下可以及時的修正參考滑移率,同時該組合控制算法還繼承了滑模控制算法的特點,整個控制系統的響應速度得到了極大的提高,利用模糊控制算法實現對系統參數的自動調整,提高制動系統的實用性和安全性。
2 控制系統原理
2.1 輪胎的縱向附著系數——滑移率特性
在經過實驗研究之后,專家學者發現縱向附著系數和滑移率之間的關系并不是一種簡單的線性關系而是一種復雜的非線性關系,在滑移率增加到某一數值之前,輪胎的縱向附著系數也會逐漸增加直到達到峰值。但是如果在縱向附著系數達到峰值之后滑移率繼續增加,縱向附著系數反而會不斷下降,如果將縱向附著系數和滑移率之家你的關系畫成函數曲線,我們就可以非常顯著的發現,圖像有一個最高點,而最高點所對應的滑移率我們稱之為最佳滑移率。汽車ABS系統的原理就是輪胎附著系數與滑移率的關系而設計的。那么汽車ABS系統是怎么來控制滑移率的呢?一般情況下,汽車ABS系統都是通過控制輪胎與地面之間的制動壓力來實現對滑移率的控制的,如果增加輪胎和路面之間的縱向附著力,汽車的制動壓力就會大幅度的提高,從而就能夠非常快速的實現制動,增加車輛行駛的安全性。
不同的實驗會得到不同的縱向附著系數和滑移率之間的函數關系模型,當前最流行的公式是魔術公式模型:

其中式中的ABCD全部為待定系數,可以通過試驗測量。下面給出幾組具有代表性的路面參數數據。在干燥的瀝青路面上,A=0.85,B=2.4,C=4.5,D=0.9。最佳滑移率為0.2。在松礫石路面上,A=0.45,B=2.4,C=5.0,D=0.9。最佳滑移率的值為0.155。
2.2 單輪汽車運動模型
為了減少問題研究的難度,所以在研究的時候,我們忽略掉次要因素,將模型進行適當的簡化突出主要問題,現在我們做出下列假設:首先,我們假定汽車的轉向角輸入為0,同時忽略掉汽車的垂直運動和傾側現象,只考慮汽車的縱向的直線運動,而且我們也不考慮汽車的側向運動和橫擺運動。同時我們也不再考慮轉向系統對整個汽車的影響,并且假定汽車的自重和載荷均勻分布與四個輪胎之上。最后我們假定輪胎在制動過程中不發生變形,忽略因為制動而導致的汽車質心位置的變化。我們假定汽車行駛的路面是理想路面,不存在坡度和坑洼。
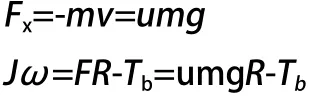
在進行了上述假設之后,這時我們可以將汽車的運動簡化為單輪汽車運動模型,縱向輪胎受到縱向摩擦力F的作用,產生縱向加速度v,車輪中心出輪胎受到制動力矩T和縱向摩擦力F產生的力矩作用以角速度ω,縱向摩擦力的力臂為輪胎的半徑R。根據牛頓力學定律,我們可以建立如下的物理學模型:
2.3 制動系統模型
汽車的制動系統實現制動的最根本的方式就是將制動壓力轉化為制動力矩,傳動機構和制動器是制動系統的兩個重要組成部分,本文所涉及的傳動機構是液壓傳動系統。液壓傳動系統和其他傳動系統相比延遲比較大,所以在進行研究分析的時候,我們可以將液壓傳動系統可以簡化為一個帶遲滯的一階慣性環節,其傳遞函數為:
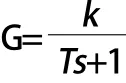
式中的參數T=0.01,K=100。
制動系統的制動器可以將液壓傳動系統提供的壓力變成制動力矩以此來實現制動效果,在理想的狀態下,制動器制動力矩為:

3 控制器設計
3.1 滑模控制器設計
滑模控制器根據滑移率λ跟蹤最佳的差e來進行制動壓力調解,這樣就可以降低跟蹤誤差。通過計算我們可以得出,最佳滑移率是通過自適應調節器來確定的,而滑模參數是通過模糊邏輯調解器來確定的。
3.2 自適應調節器設計
本組合控制算法可以充分利用獲得的滑移率λ和縱向附著系數μ來對最佳滑移率的數值進行實時的調控,當汽車行駛在不同的路面上時,最佳滑移率就可以隨時的進行變化,以此來確保系統的安全性與穩定性,自適應調節的原理是基于輪胎縱向附著系數和滑移率的關系曲線特性來建立的,由于最佳滑移率對應的是縱向附著系數的峰值位置,所以峰值兩側的曲線斜率為一正一負。
3.3 模糊邏輯調節器設計
在滑模控制器設計的時候,滑模參數的設定并沒有什么科學的理論依據,一般都是通過多次實驗的方法來進行確定,這就使得滑模參數的設定非常的復雜繁瑣,而且得出的參數準確度也不是很高。而模糊邏輯調節器自身具有很強的自適應性,所以我們可以利用模糊邏輯調節器自動的調整滑模參數。
我們將模糊邏輯調節器的輸入變量選擇為誤差e和誤差變化率Δe,輸出變量選擇為滑模參數k1、k2的變化率Δk1、Δk2。輸入和輸出的語言變量的隸屬度函數都設置為鐘型函數,變量等級設置為5級,根據輸入變量和輸出變量之間的定性關系,我們就可以建立一個模糊規則表。
4 仿真
在汽車ABS系統設計完成之后,還要對其進行驗證。
我們首先進行單一路面情況下的仿真,仿真中選擇干瀝青路面。在完成仿真之后發現,當選擇不同的自適應滑模參數,那么仿真結果也不同。在多次試驗之后,我們可以發現,控制效果最好的滑模參數為k1=500,k2=0.01,使用這個參數進行仿真之后得到的制動距離為24.3006米,制動時間為2.417秒。附著系數的利用率為0.9337。為了實現與自適應滑模控制系統的比較,我們將自適應模糊滑模控制的滑模參數也設置為k1=500,k2=0.01。滑模參數的變化是通過模糊邏輯調節器輸出乘上輸出比例系數來得到的,當我們選擇不同的比例系數的時候,仿真的結果也不完全相同。在多次比較之后,我們選擇輸出Δk1的比例系數為96,輸出Δk2的比例系數為0.01,仿真試驗得到的制動距離為24.2993米,制動時間為2.417秒。為了驗證所提出的控制算法對不同路面情況的適應性和控制效果,我們分別在不同的路面狀況下對自適應滑模控制器和自適應模糊滑模控制器進行仿真,我們假設,汽車現在平坦干燥的瀝青路面上行駛一定距離,然后進入光滑冰路面。在瀝青路面上時,最佳滑移率λd=0.2,最大縱向附著系數μ=0.85。在光滑的冰面上,最佳滑移率λd=0.155,最大縱向附著系數μ=0.1。
和單一路面仿真相似的是,不同路面情況下自適應滑模參數的不同也會極大的影響仿真的結果,通過多次試驗,我們發現最后選擇效果最好的滑模參數k1=350,k2=0.01。由此得到的制動距離為87.1181米,制動時間為13.051秒,附著系數利用率為0.9990。與上面的做法相同,我們仍然將不同路面情況下的自適應模糊滑模控制系統的滑模參數初始值設定為k1=350,k2=0.01,滑模參數的變化也是通過模糊邏輯調節器輸出乘上輸出比例系數而得到的。通過實驗我們可以發現,當比例系數不同的時候,得到仿真結果也不相同。通過多次試驗我們可以發現,當我們選擇輸出Δk1=78,輸出Δk2=0.01時,仿真的制動距離為87.0883米,制動時間為13.049秒,附著系數的利用率為0.9991。
本文所提出的基于自適應調節器和模糊邏輯調節器的自適應模糊滑模控制算法從根本上來說是切實可行的,而且只需要很短的時間就可以快速的達到穩定,穩定系數較大,所以穩定性較強,響應也非常的迅速,和其他的控制算法相比,利用自適應模糊滑模控制器的汽車ABS縱向附著系數的利用率更大,制動距離也更加短,更加可以保護司機的乘客的安全。
5 結語
本文提出了一種由自適應調節器和模糊邏輯調節器結合而產生的自適應模糊滑模控制算法,當前國際上非常流行的幾種組合控制算法他們都不具備識別路面的能力,缺乏自適應能力,而且都具有或多或少的缺點,而本文所提及的自適應模糊滑模控制算法的制動時間較短,具有優異的制動效果,自適應調節器可以獲得的輪胎附著系數和滑移率信息對最佳滑移率進行修正,使得系統的參考滑移率不再是一個固定的值,而是可以隨著實際情況的不同而實時的發生變化的,增強了系統的適應能力,在不同的路面下,ABS系統都可以迅速的調整最佳滑移率的數值,使得汽車的制動系統始終保持在一個高效的狀態,具有非常強的制動效果。滑模控制器可以快速調節制動壓力,所以本控制系統可以極大的減少制動時間和汽車的制動距離,大幅度增加汽車的安全性能。模糊邏輯調節器可以根據系統滑移率的變化對滑模參數進行自動調整,使得系統存在一定的自適應性。本文所提出的自適應模糊滑模控制算法綜合了自適應控制算法、模糊控制算法、滑模控制算法三種算法各自的優點和缺點,取長補短,彌補了目前我們所使用的幾種控制算法的不足和缺點,極大的提高了ABS系統的性能和效率。汽車的ABS系統直接關系到了汽車駕駛員和乘客的人身安全,是汽車安全性能的保障,而控制算法又是ABS系統的核心部分,所以選擇合適的控制算法是ABS系統設計的核心部分。設計人員在進行ABS系統設計的時候,必須要綜合的全面的考慮問題,可以采用本文所提到的自適應模糊滑模控制算法來進行ABS系統的設計,增加汽車的安全性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
決策探索(2014年21期)2014-11-25 12:29:50