基于自適應濾波器的AUV組合導航系統研究
2018-06-01 08:44:17尤婷婷
艦船科學技術 2018年5期
查 月,尤婷婷
(1. 中國人民解放軍92941部隊,遼寧 葫蘆島 125001;2. 中國船舶重工集團有限公司,北京 100097)
0 引 言
自主式水下航行器(AUV)是新一代水下航行器,具有活動范圍大、機動性好等優點,在民用領域,可用于海底考察、海底施工,水下設備維護與維修等任務;在軍用領域可用于偵察、掃雷、援潛和救生等任務。要使AUV完成預定的任務,離不開水下導航技術,水下導航與空中導航相比,具有工作時間長、信息源少、隱蔽性高等特點,它是決定AUV技術發展與應用的瓶頸問題[1–2]。
由加速計和陀螺儀構成的捷聯式慣性導航系統(SINS)是AUV定位導航的傳統傳感器,它可以在短時間提供精確的定位信息。由于慣性器件的固有誤差,慣性測量裝置(IMU)的誤差會隨著時間累積增大,這種累積會帶來定位誤差的發散,因此需要多個導航傳感器提供外信息對SINS誤差進行補償[3]。目前,用于AUV的組合導航系統主要有SINS/DVL,INS/GPS,SINS/GPS/DVL等。
GPS是一種具有全方位、全天候、全時段、高精度的衛星導航系統,能為全球用戶提供低成本、高精度的三維位置、速度和精確定時等導航信息,但是它只能在陸地、水面和空中使用[4]。若采用GPS進行水下導航則僅限于淺水航行,AUV必須定期浮出水面才能利用GPS更新其定位信息。因此,必須設計一種適合AUV水下航行的新型導航方法。若沒有外信息輸入,SINS和DVL組合也很難提供高精確的導航信息。聲學定位系統無累積誤差,但存在高頻誤差,且更新率很低。由于地形輔助導航系統能夠克服水下聲學定位中存在的缺陷,本文研究了包含捷聯式慣性導航系統(SINS)、多普勒計程儀(DVL)和磁羅經(MCP)與地形輔助導航系統(TAN)的組合導航系統。卡爾曼濾波(KF)技術是目前組合導航系統中應用最廣泛的,并且它也是一直有效的最佳估計算法。在噪聲干擾下,經典的KF會發散,無法滿足AUV的導航精度。神經網絡具有結構簡單、可操作性強、模擬輸入輸出隨機非線性關系等特點,在非線性系統中有著廣泛的應用[5]。因此,近年來,KF與神經網絡相結合的方法得到了廣泛研究,本文提出了一種基于神經網絡自適應濾波的組合導航方法。
1 組合系統的結構配置
本文提出的SINS/DVL/MCP/TAN組合導航系統是一種較好的解決方案,可以提供比傳統導航系統性能優越的導航系統。SINS通過測量加速度和角速度計算AUV的姿態、位置和速度。DVL和MCP分別提供高精度的AUV相對海底的絕對速度信息和航向信息。在高精度的測深儀和地圖匹配算法配合下,安裝在AUV上的TAN能夠間歇地提供定位信息。
1.1 捷聯式慣性導航系統(SINS)
SINS沒有實質性的平臺,陀螺儀和加速計都是直接安裝在AUV載體上。
SINS的姿態角誤差方程可以表示為:
速度誤差方程可以表示為:
緯度、經度和高度的誤差方程可以表示為:
式中:分別為東,北,天向的速度誤差;分別為東、北、天向姿態角誤差;分別為緯度,經度和高度誤差;分別為X,Y,Z軸上的加速計偏差;分別為X,Y,Z軸上的陀螺儀偏差;為慣性坐標系內的地轉速度;為導航坐標相對地球坐標系的角速率;為作用于導航坐標內比力信息。
1.2 多普勒計程儀(DVL)
多普勒計程儀是一種高精度測量系統,它可以通過四波束法獲取速度。四波束如圖2所示。
四波束在方向上對稱分布,水平角為,垂直角為分別為四波束聲波方向,AUV的速度方向可以表示為:
1.3 磁羅經(MCP)
磁羅經由三維磁阻傳感器、角度傳感器和單片機組成,利用磁裝置獲取地球磁場方向,給出AUV的磁航向角[6]。這里,地球磁場矢量可以用正交分量X、Y、Z來描述。地球磁場水平分量可以表示為:
1.4 地形輔助導航系統(TAN)
地形輔助導航的原理是通過AUV實際測量的水深值與已配置的數字地圖進行匹配,對AUV進行的定位,定位精度與匹配區域的導航信息和地形匹配算法有關。地形匹配算法是地形輔助導航系統研究的核心技術。迭代最近點(ICP)算法是基于相關分析的大多數地形匹配方法的研究熱點[7]。
通過計算機對算法進行仿真。仿真的三維水下地形如圖3所示。地形圖存儲格式為90 m×90 m的方形網格。水深儀的測量誤差設置見表1。ICP算法的初始條件和模型參數如下:導航速度為10 m/s,行進方向角為45°,導航深度為100 m,仿真時間為1 h。ICP算法的經緯度曲線誤差如圖4所示,匹配誤差控制在0.3″以內。
2 組合導航系統的數學模型
2.1 狀態方程
導航坐標系定義為東-北-天地理坐標系,SINS誤差模型為:
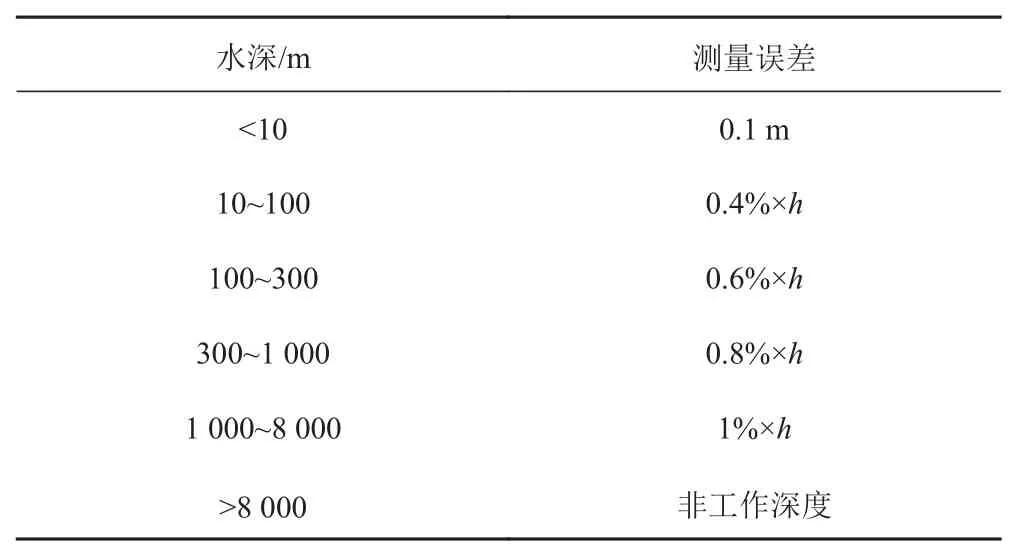
表 1 儀器誤差模型Tab. 1 Bathometer error model
其中:,,為速度誤差;,,為SINS失準角;,,為緯度、經度和高度誤差;,,為加速度計零偏,,,為陀螺常值漂移誤差。
系統的狀態方程為:其具體參數請參見文獻[5]。
2.2 量測方程
AUV的真實位置為TAN測得的位置為則 SINS測得的位置信息為:
TAN測得的位置信息為
式中:為水深;NE,NN,Nh分別為TAN沿東-北-天方向的位置誤差。
位置量測方程為:
DVL測得的速度為:
其中,ηE,ηN,ηU分別為DVL沿北-東方向的測量白噪聲。
速度量測方程為:
假設AUV的真實航向為,MCP顯示的航向為,SINS和MCP的航向為:
航向的量測方程為:
系統的量測方程為:
2.3 聯合卡爾曼濾波器
對系統的數學模型離散化,其形式如下:
當為狀態矢量時,k,為觀測矢量;k,為k–1 t o k時狀態轉換矩陣;為系統噪聲;為k–1時的系統噪聲矩陣;為k時的觀測矩陣;為觀測噪聲[4]。 通常情況下,和為與零均值不相干的白噪聲,方差矩陣為Q和R。但事實上,由于每一子系統的量測誤差,Q會隨著時間的變化而變化,而R卻隨環境的改變而不同[5]。鑒于海洋中復雜的導航環境,在仿真實驗中加入了時間相關誤差。
每一子濾波器方程的算法如下:
針對由噪聲模式帶來的不確定性,聯合濾波器具有極強的可逆性。聯合濾波器信息分布算法如下:
當和每一子濾波器和聯合濾波器的誤差協方差矩陣時,為信息分布的系數,則必須符合下式:
其中,n=3。
3 BP神經網絡模型
3.1 BP神經網絡架構
BP神經網絡是一個多層網絡,是一種按誤差反向傳播訓練的多層前饋網絡,如圖5所示。它有3層或更多層,含輸入層、隱層和輸出層。BP算法是一種監督式的學習算法,通過輸入學習樣本,使用反向傳播算法對網絡的權值和偏差進行反復的調整訓練,使輸出的向量與期望向量盡可能地接近,當網絡輸出層的誤差平方和小于指定的誤差時訓練完成,保存網絡的權值和偏差[6]。
3.2 BP神經網絡算法
在BP神經網絡中,假設輸入向量為輸出向量為為連接權。訓練過程描述如下:首先,所有的權值和闕值都首先(設為最)小隨機值。其次,為每個樣本設定實際輸出值最后,調整權值以便使多層網絡輸出產生的誤差值達到最小,整個網絡的誤差測量可以通過以下目標函數計算:
誤差的反向傳播采用梯度下降法調整各層間的連接權值,使目標函數達到最小。
通過計算梯度下降后的可得結果
這里為增益系數。
在BP算法中,權值校正所需的誤差按正常網絡傳播方向反向進行,從輸出層向輸入層的神經元傳播[10]。采用迭代算法直到目標函數小于設定值。
4 基于BP神經網絡的自適應濾波算法
采用聯合卡爾曼濾波對組合導航系統進行狀態估計的方法對系統的模型要求嚴格,若由于復雜環境所引起的對干擾統計特性無法準確獲得時,得到的狀態估計值就很難滿足定位精度的要求,因此本文采用基于BP神經網絡的自適應濾波算法,實現組合導航系統的狀態估計。
針對AUV水下組合導航系統,提出了基于BP神經網絡的自適應濾波方案。基于BP神經網絡的自適應濾波方案見圖6。在反饋回路,將BP網絡輸出的修正加入到濾波算法不準確的狀態向量估計中,提高了系統的導航性能。
本文為AUV組合導航系統設計了基于BP神經網絡的自適應濾波算法。采用離線訓練的BP網絡對實際動態環境下系統模型的不準確性進行校正,使其具有足夠的精度。該方案以減小導航誤差為目標,選取對誤差有直接影響的參數作為BP網絡的輸入,選擇觀測向量與一步預測測量向量之差作為唯一輸入。BP神經網絡的輸出理想地描述了由子濾波器預測的姿態與AUV的真實姿態之間的精確差。根據以上給出的BP神經網絡算法,采用300對樣本進行離線訓練,訓練結果見圖7。
5 仿真實驗
假設AUV在一個平面上,以一定的深度航行,系統仿真時間為5 h。根據AUV的使用環境,系統仿真條件如下:AUV速度為4 kn,初始姿態角均為0,初始航向角為45°,初始位置為165°E,32°N。組合導航系統的傳感器誤差模型如表2所示。
為了比較本文提出的方法效果,在相同的初始條件下,對經典卡爾曼濾波器和基于BP自適應濾波器進行仿真實驗,仿真結果見圖8和圖9。仿真實驗結果表明:基于BP神經網絡的自適應濾波算法通過 BP神經網絡對卡爾曼濾波輸出修正,提高了卡爾曼濾波器的估計精度,使組合導航系統定位精度均有所提高。

表 2 組合導航系統的傳感器誤差模型Tab. 2 Sensor model in the integrated navigation system
6 結 語
本文提出了一種新的地形組合導航系統,能夠滿足AUV長期保持高穩定和高精度導航的需求。基于神經網絡輔助的聯合卡爾曼濾波器比經典聯合卡爾曼濾波器具有更好的導航性能。該方法利用離線訓練的BP神經網絡對經典聯邦卡爾曼濾波估計中的誤差進行校正。AUV定位誤差大大減小,水下導航精度大大提高。
[1] 張濤, 石宏飛, 陳立平, 等. 基于UKF的SINS/LBL水下AUV緊組合定位技術[J]. 中國慣性技術學報, 2016, 24(10):639–642.ZHANG Tao, SHI Hong-fei, CHEN Li-pin, et al. An underwater positioning technology based on tightly coupled SINS/LBL for AUV[J]. Journal of Chinese Inertial Technology, 2016, 24(10): 639–642.
[2] TITTERTON D H, WESTON J L. Strapdown inertial navigation technology[Z]. London, U. K.: Peter Pegerinus,1997: 19–56, 259–320, and 385–392.
[3] 周保軍, 劉碩. 水下導航技術研究[J]. 現代導航, 2012, 2(1):19–23.ZHOU Bao-jun, LIU Shuo. Research of underwater navigation technology[J]. Modern Navigation, 2012, 2(1): 19–23.
[4] ALCOCER A, OLIVEIRA P, PASCOAL A. Study and implementation of an EKF GIB-based underwater positioning system, in Proc[Z]. IFAC Conf. Control Appl. Mar. Syst.(CAMS), Ancona, Italy. 2004.
[5] HOLTZHAUSEN S, MATSEBE O, TLALE N S, et al.Autonomous underwater vehicle motion tracking using a Kalman filter for sensor fusion[J]. 15th International conference on Mechatronics and Machine Vision in Practice,2008: 103–108.
[6] 葛錫云, 申高展, 潘瓊文, 等. 基于慣性導航/地磁的水下潛器組合導航定位方法[J]. 艦船科學技術, 2014, 36(11):120–123.GE Xi-yun, SHEN Gao-zhan, PAN Qiong-wen , et al. The underwater integrated navigation method of underwater vehicle based on INS / geomagnetic[J]. Ship Science and Technology,2014, 36(11): 120–123.
[7] 徐遵義, 晏磊, 劉光軍, 等. 海底地形輔助導航全面仿真技術研究[J]. 艦船科學技術, 2007, 29(1): 123–128.XUN Zun-yi, YAN Lei, LIU Guang-jun, et al. Study on comprehensive simulation technology for seabed terrain-aided navigation[J]. Ship Science and Technology, 2007, 29(1):123–128.
[8] 郭俊. 神經網絡與非線性濾波在景象匹配輔助導航中的應用研究[D]. 南京: 南京航空航天大學, 2009: 15–21, 33–37.GUO Jun. Application of BP neural network and nonlinear filtering in scene matching aided navigation. [D]. Nanjing:Nanjing University of Aeronautics & Astronautics, 2009:15–21, 33–37.
[9] 徐曉蘇, 周峰, 張濤, 等. 遺傳算法優化的神經網絡在SINS/GPS中的應用[J]. 中國慣性技術學報, 2015, 23(3):322–327.XU Xiao-su, ZHOU Feng, ZHANG Tao, et al. Application of neural network by genetic algorithm optimization in SINS/GPS[J]. Journal of Chinese Inertial Technology, 2016, 24(10):639–642.
[10] HECHT-NIELEN R. Theory of the back propagation neural network[J]. International Joint Conference on Neural Networks, 2015: 322–327.
猜你喜歡
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設計工程(2015年13期)2015-02-27 12:06:43
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
