2018款保時捷Cayenne制動系統新技術剖析(二)
2018-06-04 07:50:52玟燦
汽車維修技師 2018年12期
關鍵詞:功能
玟燦
(2)EPB的操作
為了實現駐車功能,執行器(直流電機)的膨脹活塞的膨脹移動必須轉換為正對制動鼓中左右兩側的兩個制動蹄的統一沖程。通過制動蹄支撐以及對已安裝張緊彈簧施加的力在制動蹄表面和制動鼓表面之間生成壓力。
電動停車制動器(如圖9所示)設計為雙伺服制動,雙伺服制動對于向前行駛和倒車具有均勻的最大制動力。在制動蹄片之間具有調節裝置的可移動支撐軸承導致兩個主要的制動蹄片,這導致兩個旋轉方向的最大制動力。
(3)功能模式
車輛靜止時的停車制動器:
在車輛靜止時啟用停車制動器要求每個車橋至少一個車輪信號,以及來自按壓EPB控制開關的啟用信號,電動停車制動器的功能燈亮起。
在車輛靜止時松開:
通過啟用制動踏板和操作EPB控制開關,松開電動停車制動器。電動停車制動器的功能燈熄滅。
緊急制動功能:
在車輪速度超過3.5km/h且每個車橋上均有車輪速度情況下拉動EPB控制開關時啟用緊急制動功能。電動停車制動器的功能燈閃爍。在組合儀表上還會顯示一條文本信息,而且會發出警告音。
自動釋放:
如果駕駛員側車門關閉、駕駛員的安全帶已系緊并且檢測到起步意圖,則在檢測到駕駛員想要起步時電動停車制動器會自動松開,功能燈熄滅。
MOT模式:
如果在轉鼓上操作車輛,則自動檢測到該功能。在前輪操作時將自動啟用電動停車制動器,在后橋操作時將自動停用電動停車制動器。功能燈相應亮起或熄滅。
維修模式:
為在后橋制動器上執行診斷或維修舉措,必須在保時捷專用的PT3G檢測儀中選擇相應菜單項。
可使用以下功能(如圖10所示):
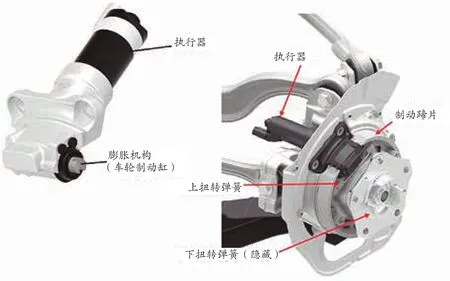
┃ 圖9 電動停車制動器部件

┃ 圖10 PT3G檢測儀的診斷選項
①調節駐車制動器(移動到安裝位置);
②駐車制動器磨合;
③駐車制動器校準。
功能燈亮起并且在組合儀表上顯示一條文本信息。
五、PSM控制系統電路的檢測與維修
看懂電路圖,能使用萬用表、示波器等測量工具對汽車電氣系統的故障進行檢測與維修,是現代汽車維修技師的重要技能。
1.供電和搭鐵電路
供電和搭鐵電路的故障,都可能導致PSM無通信、系統功能異常或失效。
(1)供電端子(如圖11所示)
PSM的供電由4個保險絲提供。
點火開關打開后,15繼電器工作,經由右前保險絲盒內的5A保險絲,給A36端子提供電源。如果該端子的供電中斷,PSM模塊將無法通信。
A4端子是模塊的常電源。
A1端子的供電在模塊內部輸送到PSM油泵,如果該供電中斷,油泵將無法運轉。
A30端子的供電在模塊內部輸送以PSM電源閥,如果該供電中斷,電磁閥將無法工作。
上述4根供電線中,任何一根出故障,都將導致PSM系統功能失效。
(2)搭鐵端
PSM模塊的A14、A46端子在線束中連接到在一起,在車身左前縱梁上搭鐵。如果該搭鐵點不良,將導致PSM系統功能失效、模塊無通信。
2.總線電路
和前代車型相比,2018款的第三代Cayenne使用了一種新型總線:FlexRay,該總線的數據傳輸速度達到了10Mbit/s。
PSM模塊連接的FLexRay總線經由DME模塊,最終連接到網關,如圖12所示。
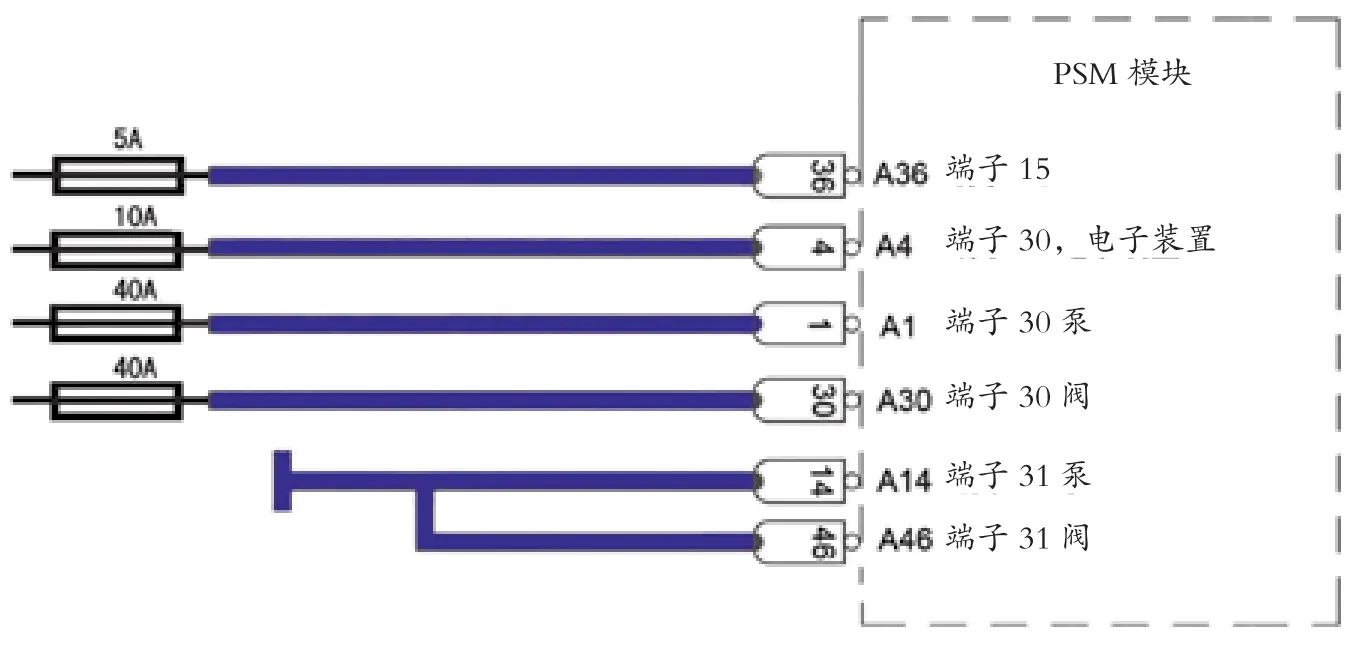
┃ 圖11 PSM供電和搭鐵電路
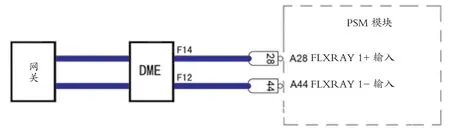
┃ 圖12 PSM總線電路
FlexRay總線不支持單線通信。也就是說,這兩根線中的任意一根,無論是對地/對電源短路、斷路、互短,還是錯接故障,都將導致總線無通信,系統失效。
當發動機無法啟動,DME和PSM模塊存在無法通信的故障,首先應檢查FlexRay總線是否存在故障。
FlexRay總線的理論波形與實測正常波形如圖13、圖14所示。
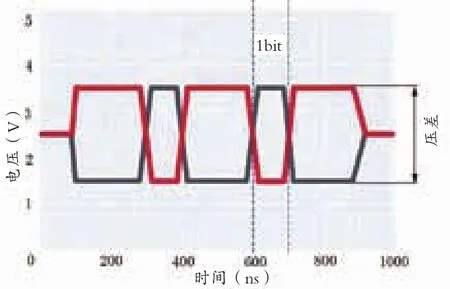
┃ 圖13 FlexRay總線理論波形
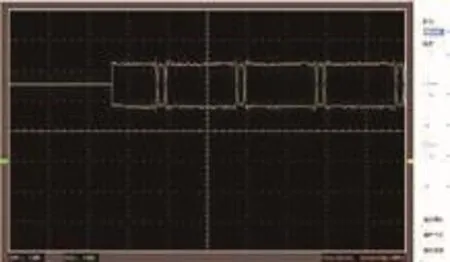
┃ 圖14 FlexRay總線實測波形
3.輪速傳感器電路
2018款保時捷Cayenne使用了透磁合金式輪速傳感器,如圖15所示。

┃ 圖15 透磁合金式輪速傳感器
透磁合金對磁場變化做出反應的敏感性約是霍耳效應的100倍。透磁合金是鎳與鐵的合金,它有各向異性磁阻(AMR)效應,在此效應下,透磁合金的電阻隨磁場的變化發生改變。

┃ 圖18 制動助力器真空傳感器電路
透磁合金式速度傳感器需要有外接電源,并通過雙線電纜與控制單元連接,它由PSM控制單元供電和接地,如圖16所示。傳感器中傳感元件的功能基于電子系統中的電阻變化,并且取決于磁場強度和方向。傳感器的脈沖發送器在密封環中以磁盤形式集成在車輪軸承中,車輪軸承/密封環的旋轉運動會改變主動式速度傳感器中的電阻,電阻變化由傳感器元件中的電路轉為電流信號,傳送給PSM控制單元,再由PSM控制單元計算出輪速與旋轉方向。
一輛車安裝有4個輪速傳感器。輪速傳感器的線束固定在懸架部件上,汽車行駛時線束因懸架的運動而持續拉伸、彎折。所以,在PSM的電氣故障中,輪速傳感器線束內部出現金屬導線斷路的現象比較多。
對于透磁合金式輪速傳感器,可以使用保時捷專用的PIWIS Tester示波器功能,測量車輪轉動時輸出信號的波形,也可以使用萬用表的電流(mA擋)測量功能,判斷傳感器線束內部是否出現了斷路。
讀取PSM系統的數據流,可以判斷各輪速傳感器的性能是否正常,如圖17所示。
主動式輪速傳感器響應靈敏,除了測量車輪轉速的變化,還可以識別車輪的旋轉方向,用于坡道起步輔助控制。
4.制動助力器真空傳感器電路(如圖18所示)
制動助力器真空傳感器感知真空度的大小,并產生“單邊半字節數字信號”(簡稱SENT),發送到PSM模塊,如圖19所示。
從數字信號中看不出真空度的大小,只能判斷線路是否正常、傳感器和控制模塊之間有無通信。
要想知道真空度的大小,還需要讀取PSM模塊的數據流。
5.EPB開關和電機執行器電路
如圖20所示是PSM模塊電路中與EPB功能相關的部分。
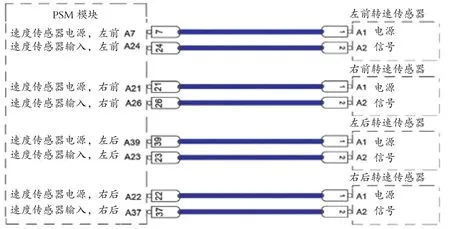
┃ 圖16 透磁合金式輪速傳感器電路
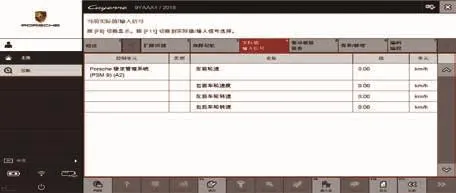
┃ 圖17 輪速傳感器的實際值
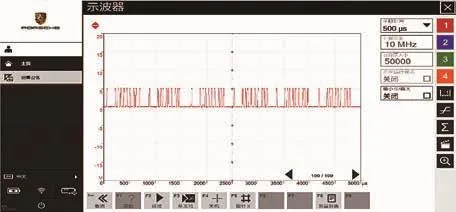
┃ 圖19 制動助力器真空傳感器產生的數字信號

┃ 圖20 EPB電路
駕駛員操縱駐車制動器按鈕,該按鈕可以產生三個位置信號,分別是空閑、釋放、拉起。
(1)不操作駐車制動器按鈕,該按鈕處于空閑狀態。
(2)按下駐車制動器按鈕,該按鈕切換成釋放狀態,駐車制動功能解除。
(3)拉起駐車制動器按鈕,該按鈕切換成拉起狀態,駐車制器電機工作,對后輪施加駐車制動,同時按鈕上面的功能指示燈亮起。
晚上打開前照燈時,按鈕內部的照明燈點亮,有助于駕駛員找到按鈕位置。該照明燈由其他模塊提供58S電源,不是由保險絲供電。
EPB電機總成(如圖21所示)內部包括:電機、旋轉編碼器、行星齒輪、小齒輪和蹄片張開裝置。
EPB電機是一個直流電機,可以通過改變端子電壓的正負極性來控制旋轉方向,產生停車制動蹄片的接緊、釋放操作。
旋轉編碼器中的霍耳元件感知電機的位置,轉換成電信號輸出。
行星齒輪起到減速、增扭的作用。小齒輪(蝸齒輪)再次減速,并和蹄片張開裝置一起,將電機的旋轉運動最終轉化為制動蹄片的張開力。
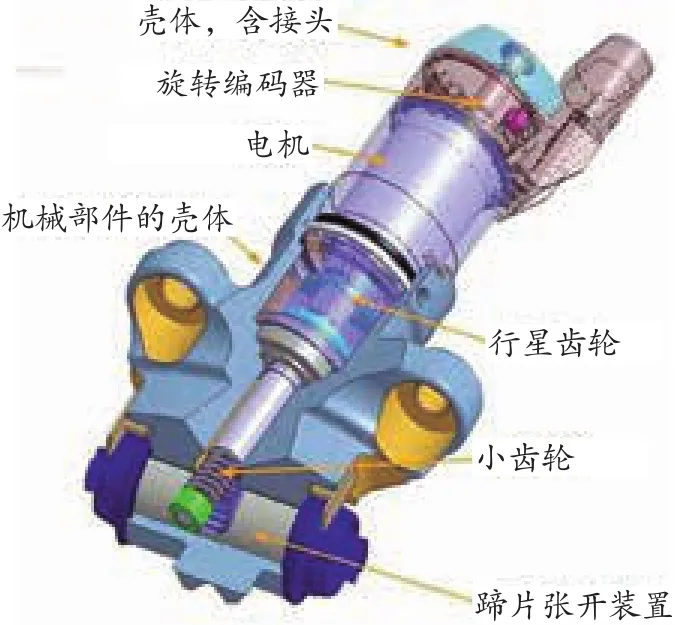
┃ 圖21 EPB電機構造
EPB電機的故障包括:電機性能不良、旋轉編碼器不良,以及內部機械故障導致的異響。
EPB電機的狀態、工作電流和位置信息可以通過數據流(如圖22所示)察看。
六、駐車制動系統的診斷與維修
(一)駐車制動器的緊急解鎖
如果EPB電機故障,駐車制動器無法再電動釋放,可以使用緊急解鎖的方法進行操作。將EPB電機后面的沉頭螺釘擰下,以便露出緊急釋放螺釘。
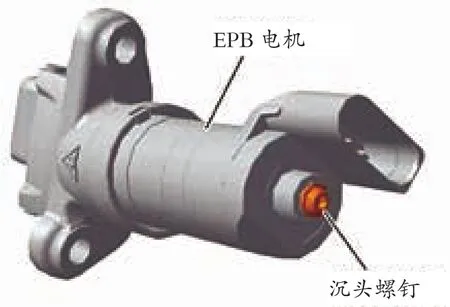
┃ 圖23 EPB電機緊急解鎖

┃ 圖22 EPB電機的數據流
將緊急釋放螺釘沿逆時針方向旋轉,直至制動蹄片松開,車輪可以自由轉動。
(二)駐車制動蹄片的間隙調節
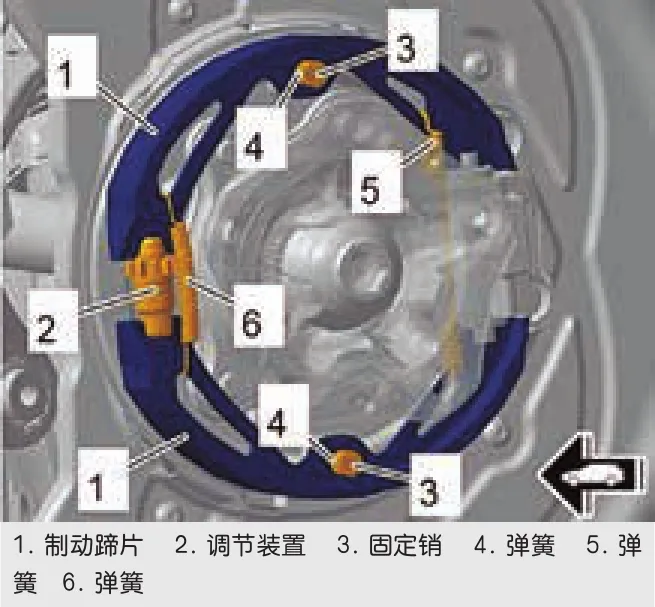
┃ 圖24 駐車制動蹄片和調整裝置結構
EPB通過操縱電機對后輪制動蹄片施加作用力的方式,使后輪的制動器產生制動力。
制動蹄片安裝在后輪制動器內部(如圖24所示),后輪制動器外側部分做成盤式,用于行車制動;中間部分做成鼓式,用于停車制動。
制動蹄片磨損后會導致它和制動鼓之間的間隙變大,這個間隙只能通過調整裝置進行人工調節。
駐車制動蹄片間隙的調節步驟:
1.擰下一個后車輪螺栓,以便可以接觸到調節裝置,不要拆下后輪。
2.舉升車輛。
3.釋放停車制動器,以便車輪和制動盤能夠自由轉動。
4.調節兩個后輪上的制動蹄片。
(1)轉動相應的后輪,使開口朝向調節裝置的位置。
(2)使用螺絲刀對調整裝置進行調整,直至后輪不能再轉動為止(如圖25所示中,A方向調松,B方向調緊)。

┃ 圖25 調整裝置
(3)將扭矩扳手調整到100N·m,轉動后輪。如果后輪能轉動,則應繼續將調整裝置調緊,直到100N·m的扭矩無法轉動后輪為止。
(4)松開調整裝置,每轉動一個齒應發出一下“咔嗒”聲,使其發出 14 ±1下咔嗒聲。
(全文完)
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
