遠程實驗中的多功能中繼器的研制
2018-06-05 03:54:46黃國輝姜周曙
實驗技術與管理 2018年5期
潘 廣, 黃國輝, 姜周曙
(杭州電子科技大學 能量利用系統與控制研究所, 浙江 杭州 310018)
近幾年,國內高校實驗室建設投入巨大,取得了豐碩的成果,但是在傳統實驗系統的實際應用中還存在一些問題,例如缺少對實驗室現場數據的監測和管理。因此,有必要設計一套應用于遠程實驗的多功能中繼器,將實驗室現場數據通過網絡傳輸到數據中心,便于實時了解實驗室情況,分析和評價實驗系統的效率和效益。
本文提出了一種以自主研發的三容水箱實驗臺為對象、內嵌uCos-ii實時操作系統的遠程實驗多功能中繼器。uCos-ii系統以線程為基本單位進行工作,很好地對系統資源和多線程進行管理,應用也更加靈活,能夠滿足開放性實驗對實時性與可靠性的要求。
1 總體方案設計
多功能中繼器主控制模塊采用基于ARM內核的高性能處理器作為處理芯片,內嵌uCos-ii嵌入式實時操作系統和FatFs文件系統。如圖1所示,系統硬件電路分為中繼器和采集控制模塊兩部分。中繼器主要由電源模塊、單片機最小系統模塊、RS485通信模塊、網絡通信模塊、SD卡本地存儲模塊等構成[1]。三容水箱采集控制模塊的核心部分為A/D采樣電路,輔以外圍隔離、濾波與放大電路模塊。硬件電路采用模塊化設計思想,既能提高硬件電路的整體可靠性,也便于硬件電路的維護和升級。
2 系統硬件設計
2.1 電源模塊
穩定、可靠的電源模塊是多功能中繼器正常工作的必要前提。在進行電源模塊的設計時,需重點考慮電壓、功率和數模隔離。
電壓的穩定可靠是有源器件工作的必要條件。作為數模轉換的參考基準,電壓是否穩定將直接影響采集精度。采用24 V—5 V—3.3 V三級降壓模式,其中24 V—5 V采用LM2575集成穩壓電路,5V—3.3 V采用LM1117集成穩壓電路,最大限度地確保穩壓值偏差較小[2]。

圖1 系統總體硬件框圖
對于功率匹配的設計,首先需要分析所有有源器件的工作功率,按照瞬時最大工作電流求得有源器件瞬時最大工作功率,再給予部分冗余和考慮電源轉換效率等因素。
硬件電路中數字電路在電平轉折處近似于突變,造成電壓和電流變化速率快,易對模擬電路產生影響。因此,將隔離元件(磁珠、電容、電感、0 Ω電阻)單點接地,使模擬電路和數字電路相互隔離。
2.2 單片機最小系統模塊
選用ARM Cortex-M3內核的stm32f103vet6系列處理器芯片作為主控制芯片。該芯片具有高主頻、低功耗、資源豐富等優點,并且具有多種外部設備接口,方便外圍硬件模塊的設計,也為嵌入uCos-ii實時操作系統與FatFs文件系統提供了硬件平臺。
最小系統主要由時鐘源電路、啟動模式選擇引腳、復位電路、下載仿真電路和RTC鐘源組成。其電原理圖如圖2所示。
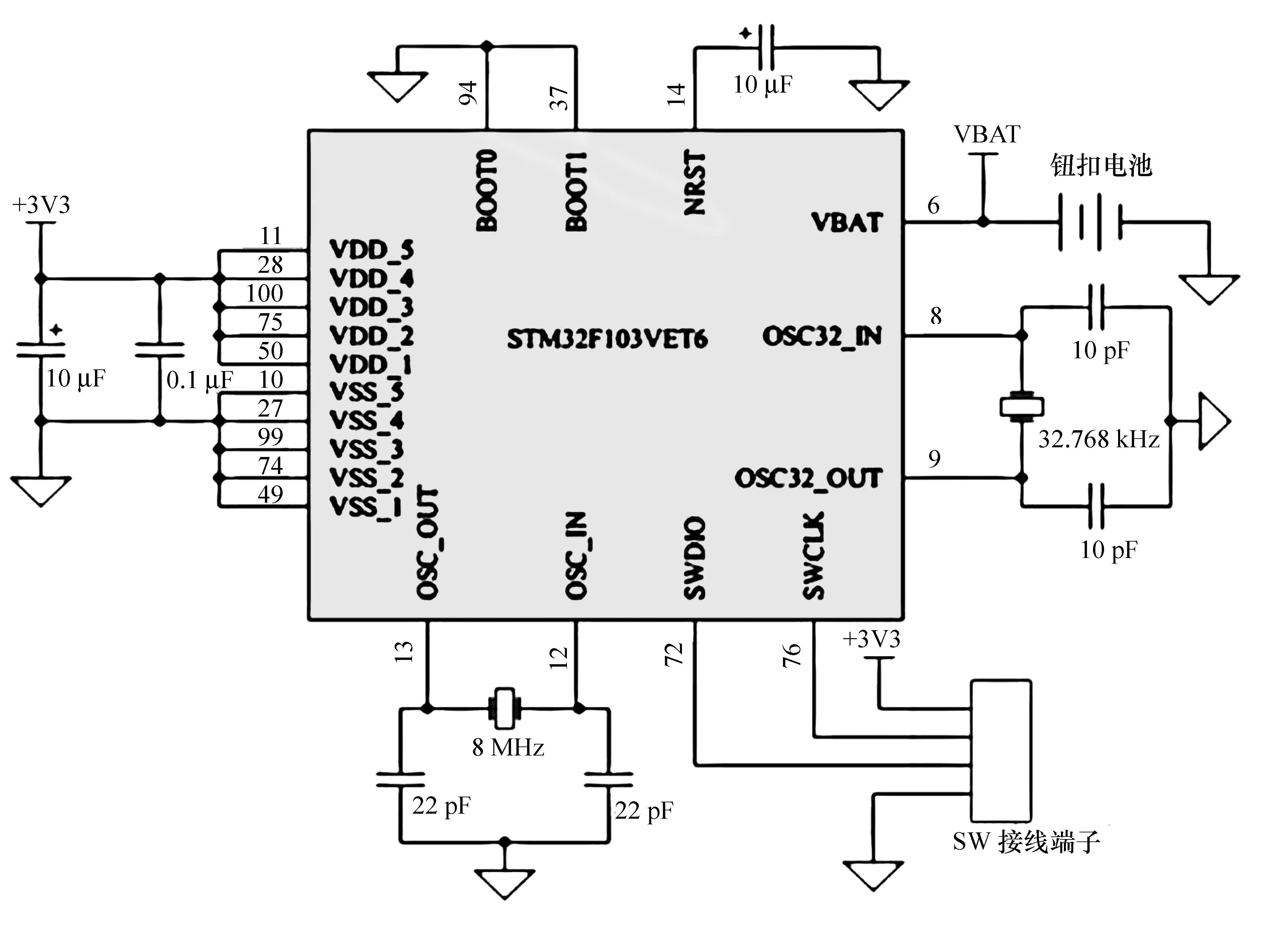
圖2 單片機最小系統模塊電路圖
2.3 RS485通信模塊
數據中繼器有2個RS485總線接口,通過接口與現場多臺數據采集器串行通信。本文選用隔離型RS485收發器ADM2483作為通信芯片,降低了硬件電路設計難度,提高了硬件電路的安全性。為達到最佳數據通信效果,在ADM2483的通信端口之間接入匹配電阻R,匹配電阻R主要用于匹配傳輸線的特性阻抗,阻止高速差分電信號在傳輸線中反射[3]。RS485普遍采用雙絞線進行數據傳輸,因此,選用120 Ω電阻作為RS485傳輸總線的終端并聯匹配電阻。通信模塊電路如圖3所示。
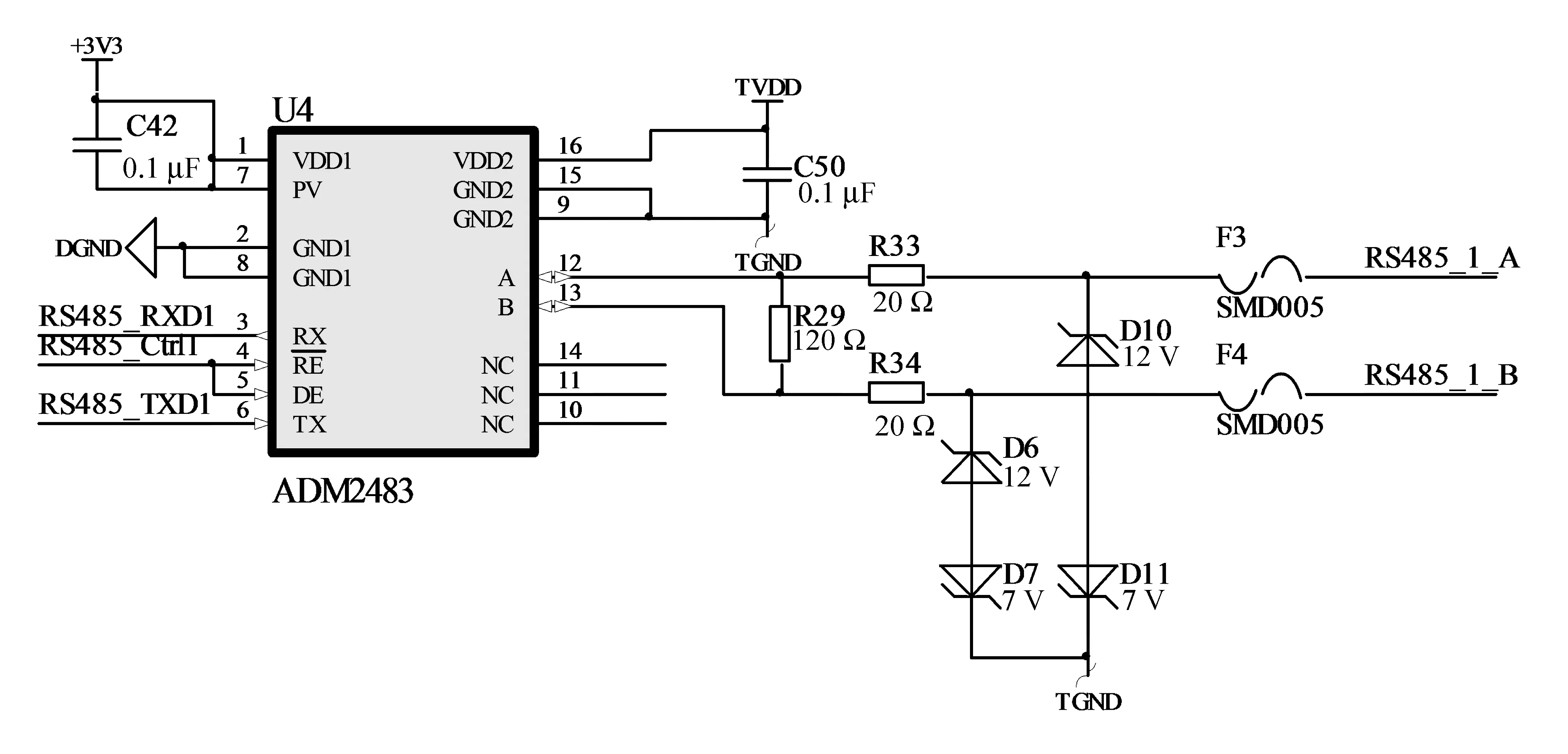
圖3 RS485通信模塊電路圖
2.4 網絡通信模塊
網絡通信模塊集成無線GPRS網絡通信和有線以太網網絡通信兩種通信方式,適用于不同的應用場合。有線以太網網絡通信選用Boccn公司的W5100以太網接口芯片,芯片內部采用硬件邏輯電路實現TCP/IP協議棧,有效降低主控制芯片的處理負擔。片內集成100 Mbit/s以太網控制器,能降低實時通信網絡延時、提高數據傳輸穩定性,滿足遠程控制實驗的實時性要求[4]。
2.5 采集控制模塊
采集控制模塊是指底層數據采集板(又稱為下位機),以ADμC834單片機為核心控制器,其外圍電路的設計如圖4所示。采集控制模塊通過傳感器采集液位、溫度、壓力等模擬量并進行A/D轉換,最后把數字量按字節發送給中繼器。底層采集板通過RS485串口設備與中繼器通信,中繼器連接上位機,根據實驗類型選擇控制算法,將控制信號通過中繼器轉發至下位機并實時發送數據采集命令,實現運行狀態監控[5]。下位機在接收到中繼器的指令后進行分析并作出響應。
3 軟件設計
3.1 軟件整體架構
為滿足上位機與底層采集板間的高實時性數據傳輸的要求,中繼器不僅在硬件設計上使用高性能的ARM Cortex-M3內核芯片,而且在主控制芯片內移植嵌入uCos-ii系統來實現系統任務線程的管理與實時調度[6]。同時,系統還移植嵌入FatFs文件系統[7],方便在上位機和下位機之間進行數據交換與數據查看。
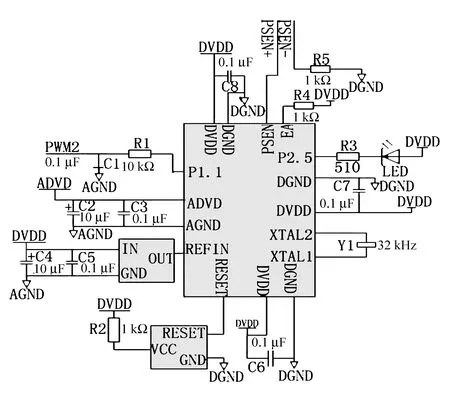
圖4 采集控制模塊電路圖
系統上電啟動后,其初始化工作是首要工作。初始化包括系統變量初始化,uCos-ii實時操作系統初始化,相關消息隊列、信號量集以及信號量初始化,MCU外設初始化和動態內存管理初始化。系統總體軟件流程圖如圖5所示。

圖5 系統總體軟件流程圖
3.2 數據傳輸設計
數據傳輸是通過數據接收線程和數據發送線程來完成的。為保證數據的安全,中繼器的數據包均采用AES(advanced encryption standard)加密算法加密,再傳輸給數據中心服務器;而數據中心發送的數據包,中繼器通過解密、過濾,再將數據發送給采集控制板進行控制。在數據傳輸設計中,通信協議是準確進行數據傳輸的重要保障。該協議在遵循數據傳輸協議國家標準的前提下,結合本系統的需求進行設計。數據包由起始符、時間戳、包編號、包體長度、中繼器編號、數據類型、包體和校驗位組成。起始符為固定的“@@”,表示數據包的開始;包體長度為4字節,是除起始符和校驗位外的總長度[8]。請求數據包格式如表1所示。

表1 請求數據包格式
注:數據類型的具體定義如下:0—連接請求;1—身份驗證;2—驗證實驗臺開關;3—實驗數據;A—心跳包數據。
根據數據類型,上位機可以顯示實驗臺是空閑,還是進行實驗中。控制指令數據包的數據類型為固定值“K”,格式與請求數據包完全一樣,而包體內寫明具體的控制指令,如采集溫度、控制水箱液位等。
3.3 心跳保活設計
為了保證及時、有效地檢測到一方的非正常斷開,保證連接的資源被有效利用,保活機制就成為必要[9]。通常有兩種保活處理方式:(1)利用TCP協議層實現的Keepalive;(2)自己在應用層實現心跳包。由于應用層實現心跳包具有很好的靈活性,本系統選用該種方法來保證實驗的實時有效性。心跳包數據以固定時間間隔發送,判斷正確的回復,確定網絡連接是否正常。
4 功能實現
4.1 遠程實驗實現
實驗用戶進入登錄界面,發送建立連接的請求。上位機啟動后一直在等待接收中繼器的請求信號,建立會話連接。當連接成功后,中繼器將向多臺下位機發送驗證實驗臺開關數據,驗證成功后,開始進行遠程實驗。
實驗開始時,上位機把用戶設置的實驗參數及控制指令發送到中繼器,進行解析處理后發送到對應的實驗臺進行實驗;下位機則根據實驗類型進行相應的操作,通過串口與采集控制板進行通信。下位機會實時把液位、溫度、流量、壓力等信息通過串口發給服務器端,并把數據存入數據庫。在另外一個線程中,通過網絡發給客戶機并以flash的方式顯示給用戶,如圖6所示。
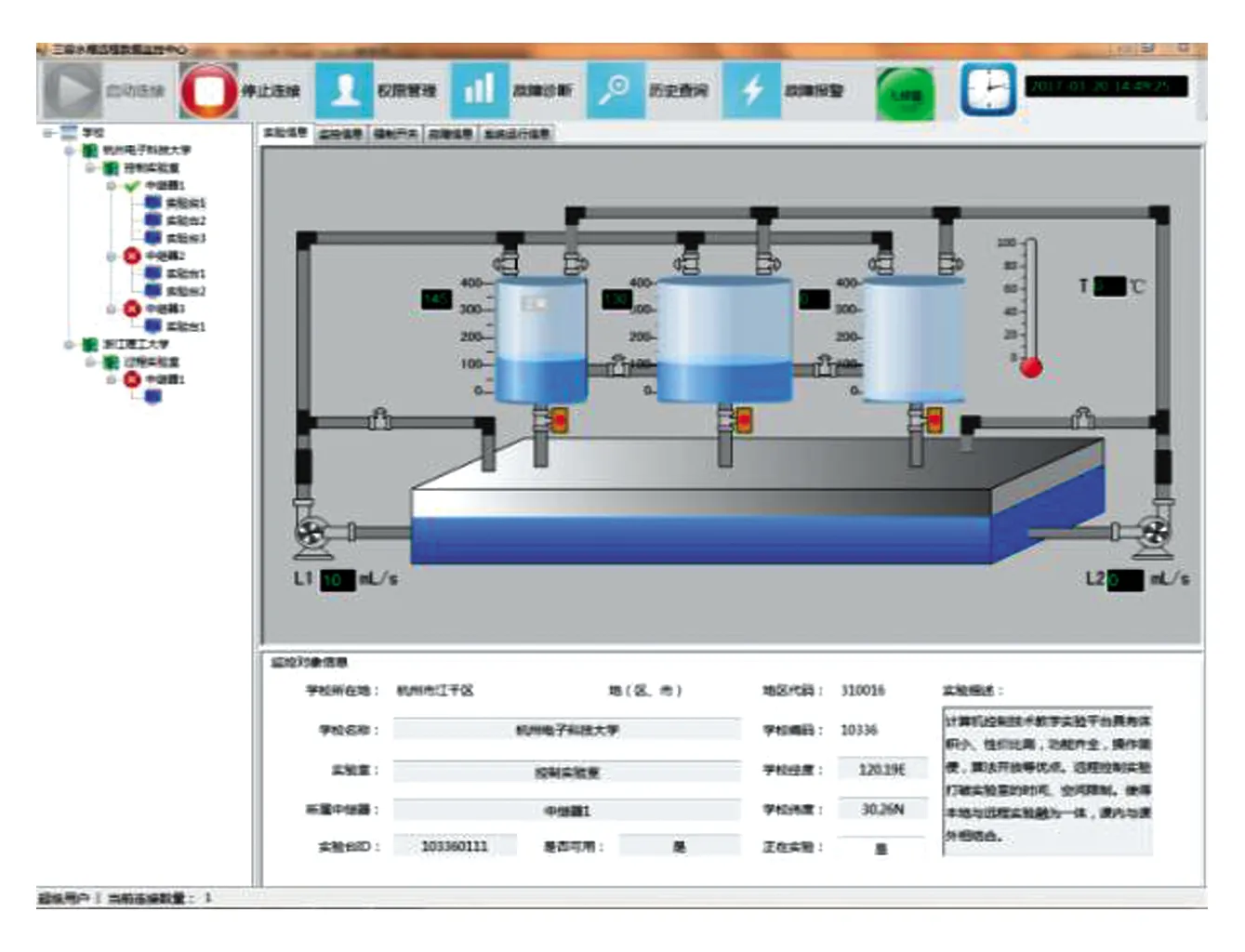
圖6 遠程實驗flash效果圖
通過中繼器能夠有效地利用計算機資源來進行更多的實驗,不僅節約成本,而且方便管理,使遠程實驗更加有序的進行[10]。
4.2 算法實現
利用良好的硬件平臺和uCos-ii實時操作系統,將模糊自適應PID控制算法嵌入到中繼器中,不僅能夠避免每臺上位機都進行Matlab編程,而且使遠程實驗更加準確、有效地進行。中繼器接收到上位機的Kp、Ki、Kd值,對眾多實驗臺進行模糊自適應PID控制[11],將得到精準值再轉發給下位機,控制三容水箱實驗臺進行實驗,二階液位控制運行效果圖如圖7所示。

圖7 二階液位控制運行效果圖
部分程序如下:
/*******模糊規則表*********/
int kp[7][7]={{PB,PB,PM,PM,PS,ZO,ZO},
{PB,PB,PM,PS,PS,ZO,ZO},
{PM,PM,PM,PS,ZO,NS,NS},
{PM,PM,PS,ZO,NS,NM,NM},
{PS,PS,ZO,NS,NS,NM,NM},
{PS,ZO,NS,NM,NM,NM,NB},
{ZO,ZO,NM,NM,NM,NB,NB}};
/****模糊推理規則的可信度*****/
float form[7][7];
int i,j;
for(i=0;i<7;i++)
{
float w,h,r;
for(j=0;j<7;j++)
{ h=es[i];
r=ecs[j];
w=fand(h,r);
form[i][j]=w;
}
}
/**求得的最大值賦給form[a][b]**/
int a=0,b=0;
for(i=0;i<7;i++)
{
for(j=0;j<7;j++)
{
if(form[a][b] { a=i; b=j; } } } 遠程實驗是開放實驗室的重要組成部分,而中繼器又是遠程實驗不可或缺的[12]。以stm32f103vet6為主控制芯片設計的基于uCos-ii的多功能中繼器不僅能夠完成遠程實驗,而且嵌入了模糊自適應PID控制算法,實時性更強、實驗效果更佳。目前,該多功能中繼器在以三容水箱為控制對象的實驗室中取得了良好效果,并成為遠程數據監測系統核心部分。 參考文獻(References) [1] 許向東,黃國輝,姜周曙,等.太陽能熱水工程數據采集系統的研制[J].測控技術,2017,36(3):37-40. [2] 封位,黃國輝,姜周曙.遠程實驗數據監控系統設計與應用[J].實驗技術與管理,2017,34(9):142-145. [3] 孫銀山,尹軍華,寇新民,等.SF6密度繼電器RS-485通信終端電阻匹配方法研究[J].電氣自動化,2015(1):46-48. [4] 王海民,王宏志.STM32以太網控制系統[J].長春工業大學學報(自然科學版),2014(1):60-65. [5] 牛勇超,姜周曙,黃國輝,等.基于JavaEE的開放實驗管理系統的設計與實現[J].實驗技術與管理,2017,34(1):153-156,193. [6] 廉小親,張陽偉.基于UcosII系統的電氣火災遠程監控系統[J].測控計算,2015,34(12):70-73. [7] 李世奇,董浩斌.基于FatFs文件系統的SD卡存儲器設計[J].測控技術,2011,30(12):79-81. [8] 全國工業過程測量和控制標準化技術委員會第四分技術委員會.基于Modbus協議的工業自動化網絡規范第1部分:Modbus應用協議:GB/T 19582.1—2008[S].北京:中國標準出版社,2009. [9] 周鳳石.基于Windows Socket的網絡通信中的心跳機制原理及其實現[J].沙洲職業工學院學報,2009,12(3):17-21. [10] 蔣帥.遠程網絡實驗管理平臺的研究與設計[D].上海:東華大學,2014. [11] 郭平.基于模糊PID的三容水箱液位控制的設計[D].南寧:廣西大學,2011. [12] 崔貫勛.基于物聯網技術的實驗室安全管理系統的設計[J].實驗室研究與探索,2015,34(3):287-290.5 結語
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
