導航電子地圖中適宜比例尺的優選
2018-06-06 09:46:54王德興杜潤芝袁紅春王振華
導航定位學報 2018年2期
王德興,杜潤芝,袁紅春,王振華,董 浩
(上海海洋大學 信息學院,上海 201306)
0 引言
導航電子地圖作為人們日常出行的常用工具,能夠為用戶提供更多的位置信息。當用戶處于一個較大的區域范圍時,所關心的是整個區域的概括分布、方向等信息;隨著搜索范圍不斷地縮小,用戶所關心的信息越來越詳細。正是因為用戶的這種多層次需求,普通定位導航在為用戶提供不同詳略程度的信息時,如果使用的導航地圖比例尺過小,顯示效果可能過于簡略,很難捕捉具體位置信息;如果使用的導航地圖比例尺過大,可能顯示效果過于細節微觀,無法從一定高度宏觀上把握整體信息,需再次縮小比例尺。如此操作使得縮放地圖頻繁,而用戶很難尋找到所需信息詳略得當、更加適宜的比例尺。
文獻[1]提出自動調節導航電子地圖中不同區域的比例尺顯示,以達到自適應多尺度表達。文獻[2]通過考慮用戶因素和時空環境建立導航電子地圖主動表達模型。文獻[3]針對電子地圖數據的存儲和處理進行了相關研究。文獻[4-6]對電子地圖中的制圖綜合技術從不同角度進行了改進。文獻[7-8]采用不同的方法制作電子地圖。文獻[9]引入細節層次(level of detail,LOD)思想,提出同一比例尺數字地圖不同詳細程度的分層顯示方法和不同比例尺數字地圖嵌套顯示方法。文獻[10-12]通過擬合負載量和比例尺之間的關系,確定顯示的比例尺達到更好的顯示效果。文獻[13]提出了實現電子地圖注記的合理分布及隨著電子地圖比例尺的增大實現逐級遞增。目前,針對導航電子地圖的研究主要集中在比例尺的自適應表達和多尺度數據的制圖綜合等方面;而針對導航電子地圖中用戶所需不同詳略程度的信息,很難選擇適宜比例尺的問題研究較少。導航電子地圖是面向個體用戶的,應更切合用戶的多層次任務需求;為用戶提供所需位置信息適宜的比例尺,才能達到較好的導航效果。
本文采用概念格作為數據分析工具,根據多比例尺及其地物要素構造概念格,在概念格的哈斯圖中,可清晰地找到不同比例尺及其對應的地物要素,然后根據所需的目標地物尋找到包含目標地物的概念節點及路徑,分析路徑上的多比例尺及其縮放變化過程,優選適宜的比例尺來捕捉導航中所需的信息。
1 概念格
有關概念格的知識可參閱文獻[14-15]。
定義1:在形式概念分析中,一個形式背景表示為K(G,M,I),其中G是對象集合,M是屬性集合,I是G和M間的二元關系。對于一個對象x∈G,屬性m∈M,那么xIm就表示對象x具有屬性m。
定義2:形式背景對象集A?G,屬性集B?M,分別定義如下2個映射,即f(A)={m∈M|?x∈A,xIm}、g(B)={x∈G|?m∈B,xIm}。若二者之間滿足A=g(B)、B=f(A),則稱二元組C(A,B)為一個形式概念,A稱為概念C的外延,記作Ext(C),B稱為C的內涵,記作Int(C)。
定義3:如果2個概念C1=(A1,B1)和C2=(A2,B2)滿足A1?A2,則稱C1為子概念(節點),C2為超概念(節點),C1和C2有子概念(節點)-超概念(節點)關系,表示為C1≤C2。形式背景C的所有子概念(節點)-超概念(節點)的偏序關系所誘導出的格稱為概念格。
批處理構造算法和漸進式構造算法是概念格中最主要的2種構造算法。目前Godin算法[16]是最為典型的漸進式構造算法。
2 導航電子地圖中適宜比例尺的優選
2.1 比例尺及其地物要素的概念格表示
將導航電子地圖中多個比例尺作為概念格的對象,該比例尺下的地物要素作為概念格的屬性,將二者進行符號化標記,根據以上定義,采用漸進式構造算法,構造多比例尺地物要素的概念格。
在概念格中,概念(all,?)代表沒有具體特征、綜合性最強的概念,是最高層次的頂部概念節點,其中all是概念格中概念的所有外延,對應所有比例尺,?表示概念內涵為空,即所有比例尺的公共要素為空,在導航電子地圖實際應用中,至少有一個公共地物要素屬性,一般不為空。概念(?,all)具有所有屬性特征,是屬性最詳細的底部概念,其中?表示概念的外延為空,all是概念格中所有的內涵屬性,即沒有一個比例尺能夠表示所有的地物要素屬性,但是由于制圖綜合技術的限制,導航電子地圖上顯示的比例尺的個數有限,最大比例尺即為涵蓋地物要素最詳細的比例尺。對于非頂點非底部概念節點,一般具有1個或1個以上的子(或超)概念節點,其概念節點的內涵是其子概念節點內涵中一組公共地物要素屬性值。以此將多個比例尺及其對應的地物要素表示在概念格上。
2.2 導航電子地圖中適宜比例尺的優選算法
1)將導航電子地圖中多個比例尺進行降序排列,加以符號標記,多比例尺下對應的地物要素加以標記并以符號表示。
2)將已標記的多比例尺作為概念格的對象,該比例尺下的地物要素作為概念格的屬性,采用漸進式構造算法,將待插入的對象與概念格內已存在的概念節點進行交運算,如果原概念格內節點內涵包含在新對象內涵之中,僅需要將新對象的外延加入到外延中;如果新節點對象的內涵與概念格內節點內涵的交集首次出現,則需要新增概念節點至概念格內;交集為空,不作任何修改,從而構造出多比例尺及地物要素的概念格。
3)在概念格的哈斯圖中,每個概念節點外延中最左邊序號對應的比例尺顯示最為詳細具體;介于最左邊和最右邊序號之間對應的多個比例尺,顯示效果詳細程度不同;最右邊序號所對應的比例尺顯示最為簡潔的,所含信息高度概略。
4)在概念格的哈斯圖中,從下往上尋找到包含目標地物要素的節點,在此過程中比例尺不斷縮小,當達到最高層次時,比例尺縮至最小,此時在最高層次概念節點的外延中最右邊序號所對應的比例尺最適宜觀察目標要素,觀察效果詳略得當。
5)根據用戶想要觀察的地物要素,在概念格的哈斯圖中,自頂向下找到首個包含目標地物的概念節點,該節點外延中最右邊序號對應的比例尺為觀察目標最為適宜的比例尺。此時,在之前尋找到的概念節點基礎上,如果增加其他想要查看的目標,即在多目標屬性情況下,可直接從該節點開始,向下繼續尋找首個包含多目標屬性的節點,然后選擇用來查看多目標最為適宜的比例尺。
3 實驗與結果分析
以百度地圖縮放級別為2至7級的6種比例尺及其顯示的地物要素為例,由于導航電子地圖數據更新或版本不同,同一比例尺下的地物要素顯示及注記情況略有差異。選取的比例尺分別是1∶5 000、1∶10 000、1∶20 000、1∶50 000、1∶100 000、1∶200 000,因顯示的地物要素數量眾多,為簡化實驗計算,主要采用上海市滴水湖附近的部分地物要素,分別是申港大道、環湖西三路、環湖西二路、中國航海博物館、環湖西二路影城、公交站臺、古棕路菜市場、古棕路肯德基。
假設用戶對古棕路菜市場感興趣,該目標地物在6種比例尺下的定位顯示效果如圖1所示。
用戶為把握目標地物整體概括信息,常以較小比例尺進行查看,卻容易丟失目標地物的具體位置信息,如圖1(f)所示;用戶需放大地圖,但放大過度容易出現圖1(a)情況,顯示效果過于詳細,難以把控整體道路方向;用戶又必須縮小地圖,然而縮小過程中不同的比例尺仍存在丟失目標地物位置信息的情況,如圖1(c)及圖1(d)所示;用戶來回縮放直至找到圖1(b)或圖1(e)顯示效果適宜為止。如此操作使得縮放頻率高,用戶選擇適宜的比例尺較為困難。
為選擇觀察古棕路菜市場的適宜比例尺,將這6種比例尺降序排列,并列出6種比例尺及其地物要素顯示情況,特征值1表示在該比例尺下顯示該地物要素,0則不顯示(如表1所示)。
根據概念格的定義以及導航電子地圖中適宜比例尺的優選算法,對表1中6種比例尺分別采用符號標記S1、S2、S3、S4、S5、S6作為實驗對象,將地物要素申港大道、環湖西三路、環湖西二路、中國航海博物館、環湖西二路影城、公交站臺、古棕路菜市場、古棕路肯德基分別采用a、b、c、d、e、f、g、h標記作為實驗屬性。6種比例尺及其地物要素決策表詳見表2。根據表2構造多比例尺及地物要素概念格,其哈斯圖如圖2所示。
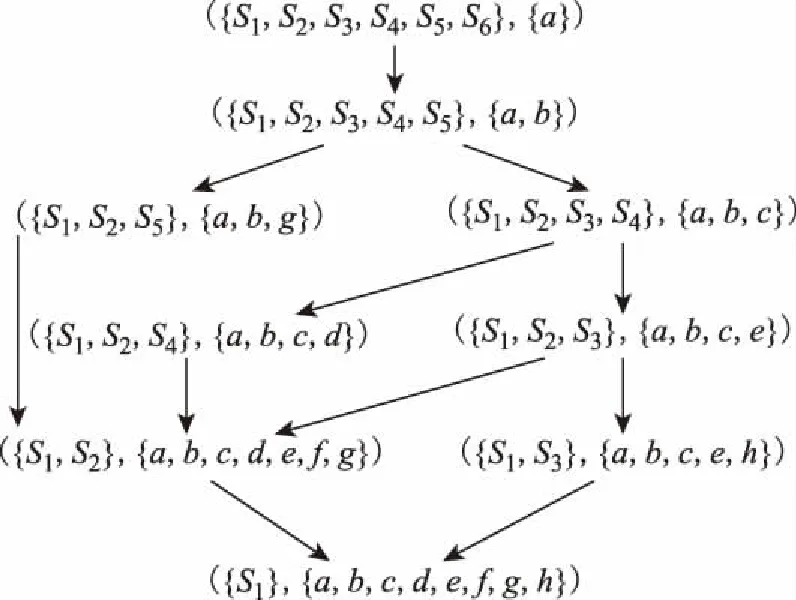
圖2 表2對應的概念格的哈斯圖
由圖2可知:針對目標地物古棕路菜市場g,底部概念節點({S1},{a,b,c,d,e,f,g,h})包含全部地物屬性,目標要素g周圍的詳細地物均被顯示出來(如圖1(a)所示),但由于屏幕尺寸的限制,用戶只能查看臨近道路信息,整體道路方向信息難以捕捉;因此需要縮小比例尺,即從({S1},{a,b,c,d,e,f,g,h})節點向上尋找所有包含屬性g的節點({S1,S2},{a,b,c,d,e,f,g})、({S1,S2,S5},{a,b,g})。
從節點({S1},{a,b,c,d,e,f,g,h})到({S1,S2},{a,b,c,d,e,f,g}),比例尺從1∶5 000縮小至1∶10 000,相應的地物要素簡略為a、b、c、d、e、f、g(如圖1(b)所示),2種比例尺下均顯示目標g;但相比圖1(a)顯示效果更為簡化,較為適合用來觀察要素g。然而在包含目標要素g的路徑上,從該節點往上,比例尺仍然可以繼續縮小,所以需要進一步搜索查找。在節點({S1,S2,S5},{a,b,g}),比例尺從1∶10 000縮小至1∶100 000,作為此路徑上層次最高的節點,比例尺已被縮至最小,該節點外延中對應的比例尺不包含比例尺1∶20 000、1∶50 000、1∶200 000,故不采用丟失g位置信息的圖1(c)、圖1(d)、圖1(f)作為顯示。1∶100 000比例尺顯示效果如圖1(e)所示,同圖1(a)~圖1(b)相比,顯示效果最為簡潔,用戶最適宜用此比例尺定位觀察要素g。
對于使用導航電子地圖的用戶,如果搜索某個地物要素,通常采用不斷放大比例尺進行查看目標;因此對于搜索目標屬性g的用戶,在圖2所示概念格的哈斯圖中,從({S1,S2,S3,S4,S5,S6},{a})開始,自頂向下搜索到首個包含地物屬性g的節點,即({S1,S2,S5},{a,b,g}),在該節點外延中,找到最右邊序號S5對應的比例尺1∶100 000,即為用戶提供觀察地物要素g優選的適宜比例尺。
導航電子地圖最大的特點是移動性,并且能夠根據用戶的多層次需求指導用戶到達目的地。在用戶不斷移動的過程中,用戶所需的信息也在不斷地變換:假設用戶處在申港大道a上,此時只需要概括性的方向信息,在圖2中查找到頂部節點包含地物屬性a,選擇S6對應的1∶200 000比例尺進行觀察,從宏觀上把握行駛概況;當用戶離滴水湖的距離逐漸縮短時,用戶此時關心的目標是中國航海博物館d,從圖2自頂向下尋找到節點({S1,S2,S4},{a,b,c,d}),選擇S4對應的比例尺1∶50 000,此時可觀察到與申港大道a交叉的環湖西二路c,以及目標地物要素d;此時當用戶駛近中國航海博物館d時,同時想要查看附近的公交站臺f,可直接從節點({S1,S2,S4},{a,b,c,d})向下尋找第首個包含地物屬性f的節點,即({S1,S2},{a,b,c,d,e,f,g}),選擇比例尺1∶10 000既能夠包含申港大道a、環湖西二路c等道路信息,同時也能夠觀察到中國航海博物館d以及公交站臺f等周圍位置信息;在此基礎上,用戶還想查看周圍其余信息,可在此節點上向下繼續尋找。
因此,當用戶處于一個較大的區域范圍時,關心的是整個區域的概括分布信息,對于概括性的目標信息,通過上述方法,找到首個包含該目標屬性的節點,其外延最右邊序號對應的比例尺既包含目標地物又能顯示宏觀方向信息。然后隨著用戶所處的范圍不斷縮小,用戶關心的信息也越來越具體、詳細,采用同樣的方法選擇合適的顯示比例尺。如果用戶增加其他想要查看的目標,即在多目標屬性情況下,在之前尋找到的概念節點基礎上,可直接從該節點開始,向下尋找到第一個包含多目標屬性的節點,再選擇用來觀察多目標詳略得當的比例尺,從而為用戶提供觀察目標最適宜的比例尺,在很大程度上降低了用戶縮放電子地圖的頻率。
4 結束語
本文提出了導航電子地圖中適宜比例尺的優選算法,在導航過程中,針對用戶所需不同詳略程度的信息,根據本文的優選方法可為用戶提供觀察目標信息詳略得當的適宜比例尺,能夠降低用戶縮放電子地圖的頻率,達到比較好的導航效果。
[1] 楊必勝,孫麗.導航電子地圖的自適應多尺度表達[J].武漢大學學報(信息科學版),2008,33(4):363-366.
[2] 馬健,江南,武麗麗,等.導航電子地圖主動表達模型研究[J].測繪工程,2015,24(2):19-23.
[3] 朱靖,欒學晨.面向導航電子地圖制作的多源地理空間數據融合技術[J].地理空間信息,2014,12(4):147-149.
[4] 詹金瑞,何華貴,陳飛,等.城市多尺度數據的地圖綜合技術研究[J].測繪科學,2014,39(4):139-144.
[5] 應申,陳桂秋,曹曉航,等.多比例尺電子地圖中基于線性道路的POI抽稀[J].測繪工程,2014,23(7):6-11.
[6] 姚靜.基于ArcGIS的大比例尺矢量電子地圖制圖研究[J].測繪與空間地理信息,2015,38(6):135-136.
[7] 楊海剛,唐曦.基于SuperMap Deskpro & CorelDraw的電子地圖制作:以上海長風公園導航地圖為例[J].測繪與空間地理信息,2008,31(5):134-137.
[8] 孫麗敏,鮑立尚.基于ArcGIS的多級比例尺電子地圖制作方法[J].地理空間信息,2015,13(4):171-173.
[9] 呂華新,李霖,翟亮.電子地圖中多尺度地圖數據顯示的研究[J].測繪信息與工程,2005,30(6):22-24.
[10] 張強,武芳,錢海忠,等.基于關鍵比例尺的空間數據多尺度表達[J].測繪科學技術學報,2011,28(5):383-386.
[11] 白小雙,江南,肖穎俊.中小比例尺基礎電子地圖多尺度顯示的尺度劃分[J].測繪科學,2014,39(5):126-129.
[12] 張昊,江南,曹亞妮.網絡電子地圖多尺度顯示的分析與研究[J].測繪通報,2014(1):90-93.
[13] 周婷婷.天地圖福建電子地圖注記逐級遞增顯示方法研究[J].測繪與空間地理信息,2016,39(4):222-224.
[14] WILLE R.Restructuring lattice theory:an approach based on hierarchies of concepts,in ordered sets[M].Dordrecht,Netherlands:Reidel,1982:445-470.
[15] WILLE R.Concept lattices and conceptual knowledge systems[J].Computers and Mathematics with Applications,1992,23(6-9):493-515.
[16] GODIN R,MISSAOUI R,ALAOUI H.Incremental concept formation algorithms based on Galois(concept)lattices[J].Computational Intelligence,1995,11(2):246-267.
猜你喜歡
現代裝飾(2022年1期)2022-04-19 13:47:32
現代裝飾(2020年2期)2020-03-03 13:37:44
中學生數理化·高一版(2018年9期)2018-10-09 06:46:48
中學生數理化·高一版(2017年9期)2017-12-19 12:15:14
中華手工(2017年2期)2017-06-06 23:00:31
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年5期)2015-02-27 07:53:25
中外會展(2014年4期)2014-11-27 07:46:46
