海上平臺起重機變幅液壓缸平衡回路研究*
2018-06-06 12:03:36王寧
機電工程技術 2018年3期
關鍵詞:動作
王 寧
(中海油能源發展裝備技術有限公司,天津 300452)
0 引言
海上平臺起重機(以下簡稱海上吊機)的變幅形式分為兩種,分別是箱體式吊臂液壓缸變幅和桁架式吊臂鋼絲繩變幅。由于占用空間小、維護成本低的原因,利用液壓缸的變幅形式在目前得到了非常廣泛的應用。變幅液壓缸平衡回路的作用是為了防止因受垂直負載力和自身重力的作用而吊臂自行下落,或者吊臂下放時出現超速或失控等現象的發生。變幅液壓缸平衡原理主要是通過在回路上設置適當的阻力,產生一定的背壓來使液壓缸平穩下降,對于保證液壓系統的安全性、海上吊機正常運轉等方面起著非常重要的作用[1]。然而,由于海上吊機接觸人群少,使用數量少,在一些液壓工程手冊等資料中,僅對變幅平衡回路的基本原理進行了簡單描述,并沒有針對海上吊機這種高壓大流量變幅液壓缸平衡回路進行專門分析。
本文首先解析了其他液壓設備的典型液壓缸平衡回路,從工作原理和應用效果做了深入的對比,指出了這些普通平衡回路的各自特點。文章結合海上吊機的特殊工況需求,通過對普通平衡回路的合理優化和完善,尤其針對在大負載液壓缸下行動作時出現的問題,提出了一種改進型的海上吊機變幅液壓缸平衡回路,以及一種新型平衡閥組的設計,期望對設計者有所幫助。
1 普通平衡回路的解析
一般教科書及工具手冊中主要介紹了兩種變幅平衡回路,一種是內控式順序閥回路,另一種是外控式平衡閥回路。結合海上吊機的實際使用工況,通過對兩種變幅平衡回路的深入探討,可以對兩種回路的特點進行準確分析。
內控式順序閥回路,也稱為自控式平衡閥回路,其主要是由一個內控式順序閥和一個單向閥并列組合形成平衡閥而實現的,詳見原理圖1(a)內控式順序閥回路。這種平衡閥的開啟壓力是通過螺紋旋桿進行調節的,首先計算出吊機自重對液壓缸下腔產生的壓力與額定載荷對液壓缸下腔產生的壓力之和,即為P2,然后設定平衡閥的開啟壓力Pk的值略大于P2,當液壓缸上腔壓力P1=0時,吊機自重和負載的總和所產生的液壓缸下腔壓力P2無法達到平衡閥的開啟壓力Pk,此時液壓缸不會自行下落,起到了平衡的作用。當活塞作下行運動時,由于順序閥的作用,回油腔會有一定的持續背壓,故變幅下降運動保持平穩。這種平衡回路,在吊機變幅下降時,需要給液壓缸上腔提供持續的高壓油,以使平衡閥達到開啟壓力[2]。但由于海上平臺吊機是變負載工況,當空載運行時,由于沒有載荷的重力勢能參與平衡,故由吊機自身系統提供打開平衡閥的功率則隨之大幅增加,并且隨著負載變化而變化,這不但在操作上難以控制,而且功率損失也非常嚴重,因此不適宜在海上平臺吊機上使用。
外控式平衡閥回路,如圖1(b)外控式平衡閥回路所示,其平衡閥的開啟壓力可以設置得很小。在活塞向下運動時,外控式平衡閥并非由下腔回油背壓打開,而是被進油路上的控制油打開,而且是一個恒定的開啟油壓,不受負載大小的影響,故平衡閥打開所需的功率是一個恒定值,因此在實現了平順控制變幅下降動作的同時,功率損失也有所減小。但這種外控式平衡閥沒有調節流量的作用,當外控壓力達到設定值時,平衡閥瞬間打開,液壓缸活塞也會隨之瞬間下落,吊機自重和負載也一同下降,啟動比較突然;同時,由于下落速度過快,液壓缸上腔的油液會出現供油不足的情況,此時就會導致上腔壓力瞬間下降,間接導致外控壓力降低,直至低于平衡閥的開啟壓力,變幅下降動作又會瞬間停止。而吊機自重加上負載的總重量高達約50 t,在瞬間啟動又停止的反復過程中,會產生非常大的沖擊載荷,會對海上吊機結構以及平臺導管架結構產生非常大的危害[3]。

圖1 各平衡回路原理圖
2 海上吊機變幅液壓缸動作分析
海上吊機變幅液壓缸承載著吊臂自重和負載重量之和,是海上吊機非常重要的結構件和液壓元件,因重量較大,對其平穩運行尤其是下降的平穩性提出了非常高的要求。從能量轉換的角度進行分析,可以發現變幅液壓缸平衡回路就是要將吊機自重和載荷共同產生的重力勢能吸收并轉化為熱能的形式釋放出來。因海上吊機維修困難,并且使用情況惡劣,加之對平穩運行的需求,這就要求設計的變幅平衡回路工作可靠、平穩性能好。海上吊機在運行時,變幅動作非常頻繁,但根據運動方向可以分為變幅起升、變幅懸停和變幅下降。在海上吊機的變幅起升動作時,液壓系統一般均處于穩定的工作狀態,此處不做過多討論。在變幅下降和變幅懸停時,可以檢驗平衡回路是否穩定和可靠,尤其在變幅下降過程中最容易出現抖動和動作不穩定等情況的發生。
在石油平臺進行鉆井、修井等作業時,要求海上吊機配合吊裝鉆桿,其中包括變幅懸停的動作比較多,這就要求吊機變幅懸停的位置精度要高,同時容易進行微調控制。在變幅懸停時,圖1(a)和圖1(b)所示的2種原理圖中控制變幅液壓缸懸停的主要是順序閥,而這種普通的順序閥是一種滑閥結構,無法避免存在細小的泄漏量,隨著懸停時間的增加,液壓缸下腔的油液不斷泄漏,導致吊臂懸停的位置不斷下降,同時負載的大小也會影響懸停下降的速度,這種情況就會影響海上的生產作業,無法滿足海上平臺吊機的實際使用要求。
在變幅下降動作時,也就是液壓缸回縮,負載和吊臂下降的動作。因海上吊機的吊臂和負載總重量可達50 t,若是產生抖動或不穩定的情況,會對吊機本身和平臺結構造成較大的沖擊載荷,影響安全使用,所以要保證變幅下降動作要高度平穩,也就是保證變幅液壓缸在有負載的情況下,通過平衡回路控制,達到穩定回縮。在負載和吊機自重的重力影響下,會有一個持續的垂直向下的力,平衡回路要將這部分重力抵消掉,達到力量平衡。如公式(1)所示,無桿腔內的壓力P2要與負載和吊機自重產生的壓力相平衡。

在海上吊機的使用工況中,負載G是一個不斷變化的值,不僅隨著吊載貨物不同重量不一樣,在變幅角度不斷變化過程中,變幅液壓缸受到的負載也是不斷變化的。若采用圖1(a)所示的平衡回路,則由公式(1)可知,當G較大時,由于P2是恒定的,則液壓缸有桿腔壓力P1就可以很小,甚至趨于0,此時變幅系統的效率比較高,能量損失較小。當G較小時,為了打開平衡閥P2,必須使P1增大才能使變幅下降動作運行,這是P1產生的都是無效功耗,系統效率大大降低,能量損失非常大,因此這種平衡回路不適合海上吊機使用。
要達到變幅動作平穩運行,在流量匹配方面也要滿足流量連續方程的要求,如公式(2)所示。在變幅液壓缸下降動作時,有桿腔和無桿腔的作用面積不一樣,因此在保證速度相同的情況下,兩腔的流量要滿足公式要求。

而圖1(b)所示的這種平衡回路,其使用的平衡閥雖然由外部油源進行控制,但這種平衡閥沒有流量調節的作用,也就是當外控壓力達到設定值時,平衡閥瞬間打開,液壓缸無桿腔油液會瞬間釋放,導致Q2瞬間增大。而Q1在短時間內難以補償Q2所增加的部分,由公式(2)可知,連續流量方程被打破,導致吊機變幅下降動作不穩定,會出現點頭的現象,這在海上吊機使用中是嚴格禁止的。
綜合上述兩種平衡回路的對比分析,并結合海上吊機的使用工況需求,本文提出了一種新型的變幅平衡閥組,原理如圖1(c)新型平衡回路所示。這種平衡閥組包含了一個經過特殊設計的平衡閥和一個裝在上腔油路上的順序閥。增加的順序閥使得油缸上腔壓力p1與平衡閥開啟壓力p3無關或者不會直接反饋,從而可以通過調節讓p1很小或者趨近于0。該閥組中的平衡閥芯是選用某公司特殊設計的閥芯,其密封形式采用的是錐面密封,并且在平衡閥特性上具有節流調節的能力,可自動控制節流的開口面積,其結構形式如圖2所示。
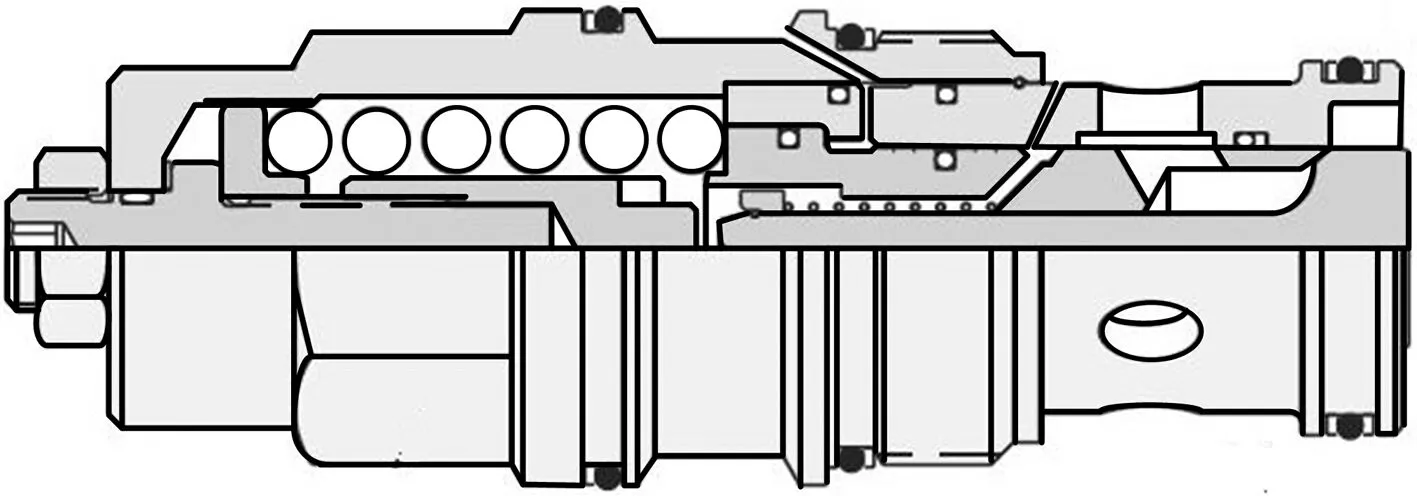
圖2 新型平衡閥芯
在系統中設定單向順序閥開啟壓力p3稍低于平衡閥開啟壓力,當變幅下降時,順序閥首先達到開啟壓力而打開,壓力油進入油缸上腔,此時供油壓力再稍微增加,就可開啟變幅平衡閥,油缸開始下降;當油缸有加速下降趨勢時,油缸上腔壓力p1會降低,但由于有順序閥的控制,該壓力波動不會直接反饋到平衡閥的開啟控制口上,并且順序閥的開啟壓力僅僅稍低于平衡閥的開啟壓力,只要下降回路提供很小的連續流量,就可以防止油缸加速下滑時因上腔流量不足而出現的“點頭”現象。
3 結語
本文分析了普通平衡回路的特點,并結合海上吊機對變幅液壓缸平衡回路的實際需求,提出了一種適合于海上平臺起重機的變幅液壓缸平衡回路和新型平衡閥組,使得海上吊機的變幅懸停動作鎖止性能大大提高。在變幅下降動作時,因新型平衡閥的自調節性,使得變幅下降動作非常平穩并且容易實現微動調節與控制。該設計已經成功在SZ36-1E/G海上平臺吊機中得到應用,使用效果較好,故該新型平衡閥組可滿足海上吊機的變幅液壓缸平衡回路的需求,為其他類似設備也可提供借鑒。
:
[1]張雅琴,張祝新.對液壓系統設計中平衡回路問題研究[J].機械工程師,2006(2):84-85.
[2]姚平喜,張曉俊.液壓平衡回路辨析[J].液壓與氣動,2005(1):74-75.
[3]麻井偉.負載敏感平衡閥的研究[D].太原:太原理工大學,2007.
[4]李興奎,吳志勇.液壓平衡回路應用探討[J].建設機械技術與管理,2006(8):89-90.
[5]周海強,周志強.液壓平衡回路設計[J].流體傳動與控制,2014(6):36-37.
[6]宋學義.袖珍液壓氣動手冊[M].北京:機械工業出版社,1995.
[7]雷天覺.新編液壓工程手冊[M].北京:北京理工大學出版社,1998.
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
