電動汽車復(fù)合再生制動研究
2018-06-07 05:04:53朱布博孫少杰賈永峰
汽車電器 2018年5期
朱布博,羅 明,孫少杰,賈永峰
(陜西交通職業(yè)技術(shù)學(xué)院,陜西 西安 710018)
隨著石油資源的日益枯竭和環(huán)境污染的不斷加劇,發(fā)展新能源汽車已成為必然的趨勢。電動汽車具有零排放、能量利用率高、驅(qū)動形式靈活、電子控制集成度高等特點(diǎn),已成為各個國家汽車工業(yè)的發(fā)展方向和汽車企業(yè)研究的熱點(diǎn)。
目前,動力電池由于受到能量密度等因素的限制,電動汽車的續(xù)駛里程短是阻礙其發(fā)展的原因之一。汽車在城市道路行駛過程中,主要受到空氣阻力、滾動阻力以及制動力3種行駛阻力,由于路況的限制,車速較低,需要頻繁起動和停止,在制動的過程中,大量能量以摩擦生熱的形式被浪費(fèi)掉,而制動力消耗的能量約占車輛行駛阻力消耗能量的90%,因此,在城市工況下電動汽車的制動能量回收對節(jié)能、增加續(xù)駛里程有著重要意義[1-2]。所示[3]。現(xiàn)行復(fù)合再生制動指由摩擦制動和電機(jī)再生制動聯(lián)合制動,其中摩擦制動時摩擦力做功,將汽車行駛的動能通過摩擦轉(zhuǎn)化為熱能,這些能量傳遞到空氣中無法進(jìn)行回收,主要包括液壓制動、氣壓制動、EHB、EMB和EWB等形式[4];而再生制動時電機(jī)將動能轉(zhuǎn)化為電能,存儲在儲能裝置中,從而實(shí)現(xiàn)對制動能量的回收再利用。
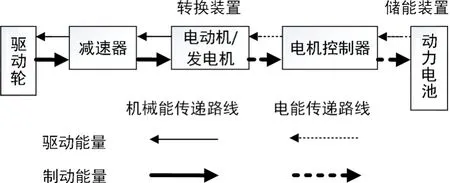
圖1 電機(jī)再生制動能量回收系統(tǒng)
1 復(fù)合再生制動系統(tǒng)
1.1 復(fù)合再生制動原理
制動系統(tǒng)作為車輛底盤中的重要組成部分,是保證車輛行駛安全的關(guān)鍵,其按制動能量來源可分為機(jī)械式、液壓式、電磁式和氣壓式等。復(fù)合制動系統(tǒng)是指同時具有兩種或兩種以上形式的制動系統(tǒng),通過協(xié)調(diào)分配制動力,發(fā)揮不同制動形式的優(yōu)點(diǎn),達(dá)到回收制動能量并延長制動器使用壽命的目的。
新能源汽車中,電機(jī)(發(fā)電機(jī))可以作為制動能量的收集裝置,能夠補(bǔ)充車輛動力電池的電能,成為新能源汽車領(lǐng)域研究的方向之一。電機(jī)再生制動能量回收系統(tǒng)如圖1
1.2 復(fù)合再生制動實(shí)現(xiàn)方式
復(fù)合再生制動系統(tǒng)包括并聯(lián)式和串聯(lián)式兩種[5],并聯(lián)式是在原有機(jī)械制動的基礎(chǔ)上按照固定的比例疊加再生制動,它無需改動原有的摩擦制動系統(tǒng),僅需在總制動系統(tǒng)中加入再生制動系統(tǒng),這將改變原有的制動特性和制動感覺,如圖2a所示。
串聯(lián)式需要改變原有的機(jī)械制動系統(tǒng),它可靈活調(diào)整機(jī)械制動力和再生制動力在總制動力中所占的比重,以滿足駕駛員需求的目標(biāo)制動力,能大幅提高制動能量回收率,但要求機(jī)械制動系統(tǒng)的控制精度高、響應(yīng)速度快,并且兩種制動力在協(xié)調(diào)的過程中要保持車輛原有的制動特性,滿足駕駛員的制動需求,因而實(shí)現(xiàn)起來更為復(fù)雜,如圖2b所示。
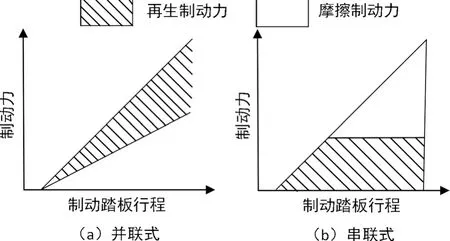
圖2 復(fù)合再生制動系統(tǒng)實(shí)現(xiàn)方式
1.3 復(fù)合再生制動結(jié)構(gòu)
前輪驅(qū)動電動汽車復(fù)合再生制動系統(tǒng)結(jié)構(gòu)如圖3所示,摩擦制動為雙管路前后布置液壓制動系統(tǒng),采用4通道4傳感器ABS。后軸的制動力僅由液壓制動完成,前軸的制動力由摩擦制動和電機(jī)再生制動共同提供。
當(dāng)駕駛員踩下制動踏板需要對車輛減速時,制動控制器依據(jù)制動踏板信號傳感器傳來的信號計算出制動要求,同時對車速、輪速、電池狀態(tài)、電機(jī)功率、管路壓力等信號綜合處理,依據(jù)制動控制策略分配摩擦制動力與電機(jī)再生制動力大小,此時電機(jī)為制動狀態(tài),并通過功率轉(zhuǎn)換器為動力電池充電,實(shí)現(xiàn)制動能量的回收。
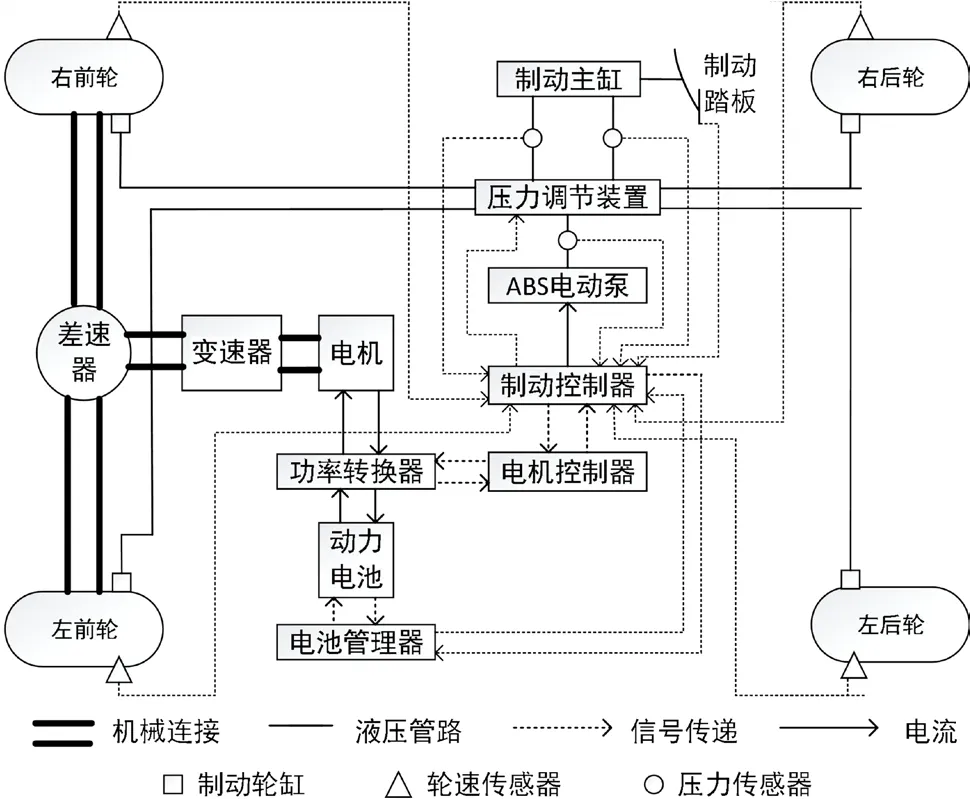
圖3 復(fù)合再生制動系統(tǒng)基本結(jié)構(gòu)
2 仿真計算
圖4為本文在Cruise軟件中建立的整車仿真模型[6]。車輛部分參數(shù)為:質(zhì)量1 209 kg;軸距2.5 m;質(zhì)心至前軸距離1.2 m;質(zhì)心高度0.5 m;車輪半徑0.301 m。電機(jī)基本參數(shù)為:額定功率75 kW;最大轉(zhuǎn)矩240Nm;額定轉(zhuǎn)速3 000 r/min;最大轉(zhuǎn)速10 000 r/min。采用串聯(lián)式復(fù)合再生制動,優(yōu)先使用電制動,在其產(chǎn)生的制動扭矩不足時,使用摩擦制動彌補(bǔ)。
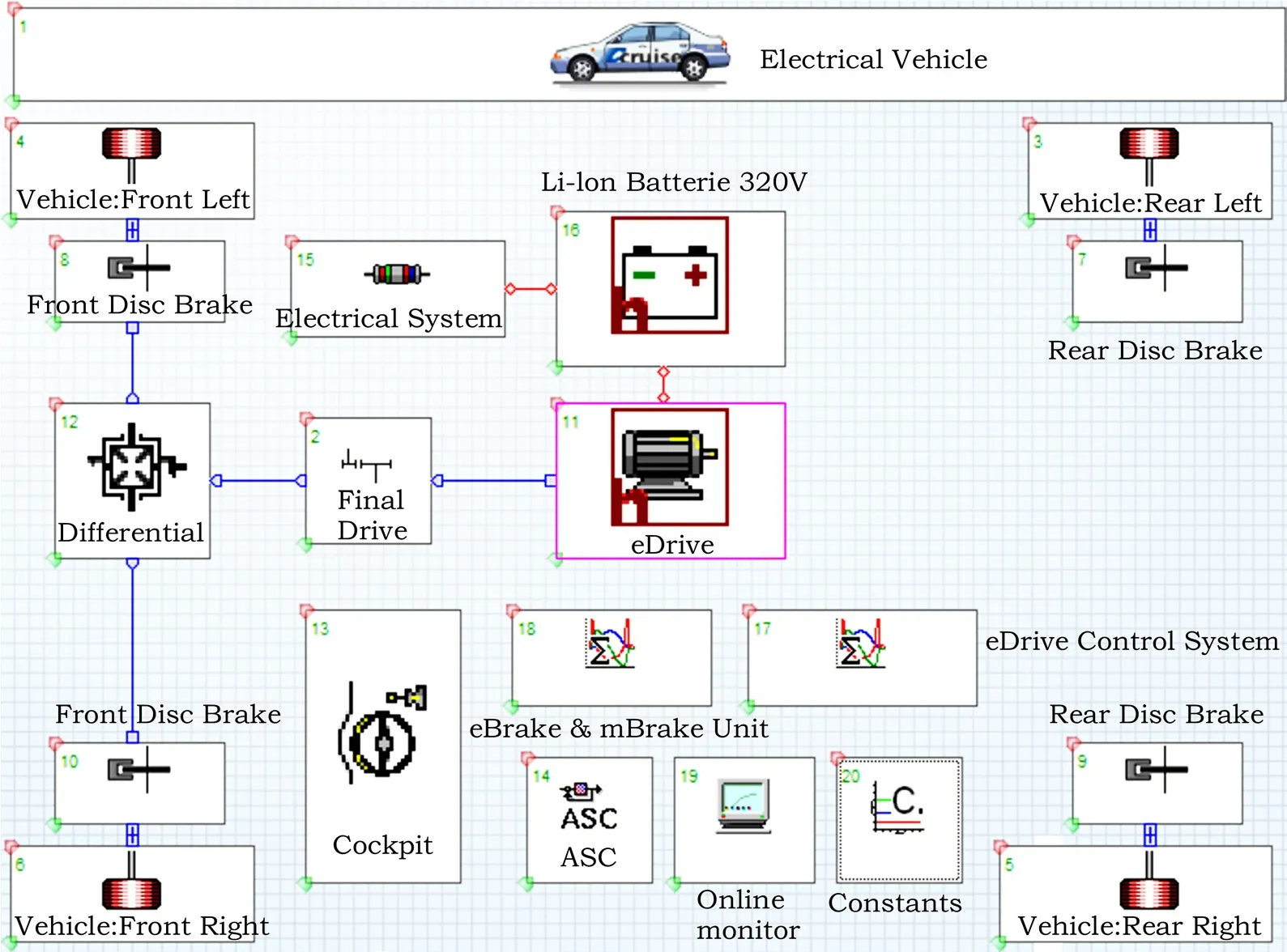
圖4 整車仿真模型
3 仿真結(jié)果分析
在NEDC工況下,從圖5中的仿真結(jié)果可以看出,在電池初始SOC值為0.8的情況下,有制動能量回收車輛的電池SOC值衰減速度明顯低于無制動能量回收的車輛。說明制動能量在很大程度上得到了回收利用,能夠有效延長車輛續(xù)駛里程。
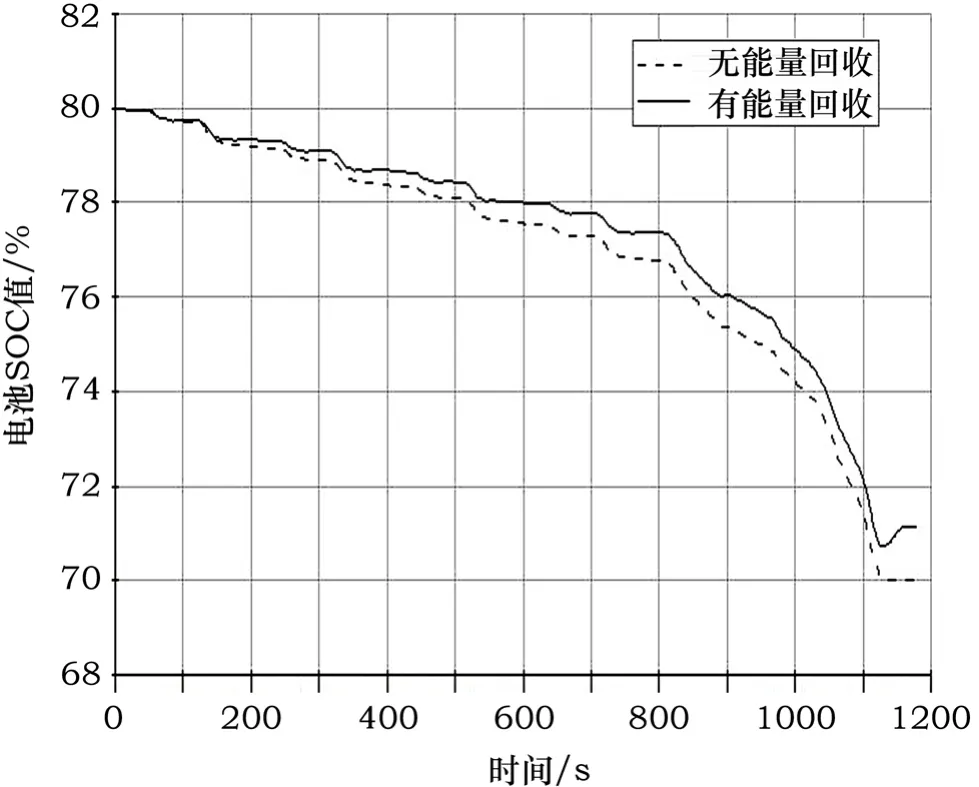
圖5 電池SOC曲線
4 結(jié)語
通過與無制動能量回收車輛的電池SOC進(jìn)行對比,結(jié)果證明采用串聯(lián)式復(fù)合再生制動,選取NEDC工況進(jìn)行制動仿真,可以有效提高能量的利用率和整車?yán)m(xù)駛里程。
[1] 朱雅君.混合動力商用車再生制動及防抱死集成控制系統(tǒng)的研究[D].長春:吉林大學(xué),2007.
[2] 陳全世.先進(jìn)電動車技術(shù)[M].北京:化工工業(yè)出版社,2007.
[3] 何仁.汽車制動能量再生方法的探討[J].江蘇大學(xué)學(xué)報(自然科學(xué)版),2003,24(6):1-4.
[4] 趙國柱.電動汽車再生制動若干關(guān)鍵問題研究[D].南京:南京航空航天大學(xué),2012.
[5] Mehrdad Ehsani,Yimin Gao,Ali Emadi.現(xiàn)代電動汽車、混合動力電動汽車和燃料電池車-基本原理、理論和設(shè)計[M].北京: 機(jī)械工業(yè)出版社,2010.
[6] 王保華,羅永革.基于CRUISE的汽車建模與仿真[J].湖北汽車工業(yè)學(xué)院學(xué)報,2005,19(2):5-8.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
