GPS/BDS/Galileo相位平滑偽距單點定位性能分析
2018-06-07 00:43:38鄺英才呂志平李林陽
導航定位學報 2018年2期
鄺英才,呂志平,李林陽,黃 嫻
(1.信息工程大學 地理空間信息學院,鄭州 450001;2.河南工業大學,鄭州 450001)
0 引言
全球導航衛星系統(global navigation satellite system,GNSS)測碼偽距觀測值不存在整周模糊度的求解問題,但其精度遠低于載波相位觀測值。為了減小偽距觀測值誤差的影響,提高其精度,文獻[1]最早提出可以利用載波相位的變化來平滑偽距。文獻[2]指出傳統載波相位平滑偽距公式沒有考慮平滑歷元次數增多的相位觀測誤差對定位精度不可忽略的影響,并論證了雙頻載波相位平滑偽距算法;文獻[3-4]比較了載波相位平滑偽距和卡爾曼濾波,提出結合二者能有效提高定位精度及穩定度。由于載波相位平滑偽距技術具有良好的抗差性、實時性、易實現性,目前其在基線解算、GNSS地基增強系統、實時動態導航定位等方面已得到了較為廣泛的應用[5-7]。
近些年,對于載波相位平滑偽距對精度影響的研究已經有了一定進展。文獻[8-10]研究了全球定位系統(global positioning system,GPS)、北斗衛星導航系統(BeiDou navigation satellite system,BDS)單頻相位平滑偽距,但沒有涉及雙頻載波相位平滑偽距;文獻[11-12]對比分析了GPS及GPS/BDS組合系統雙頻相位平滑偽距與偽距單點定位結果,但并未涉及對伽利略衛星導航系統(Galileo satellite navigation system,Galileo)平滑效果的分析。
本文利用多模GNSS實驗跟蹤網(multi-GNSS experiment,MGEX)多站多天的實測數據,從收斂速度、定位精度、定位結果標準偏差、多天平滑效果穩定性幾個方面對GPS、BDS、Galileo系統雙頻載波相位平滑偽距前后的定位結果進行了對比分析。
1 雙頻載波相位平滑偽距
GNSS解調導航信號后得到測碼偽距和載波相位觀測值,其非差觀測方程為

(1)
(2)
利用非差無幾何組合觀測值可推導雙頻載波相位平滑偽距的遞推公式。文獻[13]從無偏性角度推導了雙頻載波相位平滑偽距的表達式,以P1碼為例,在任一歷元s內可得
(3)
(4)
由式(3)和式(4)可以得到易于編程實現的雙頻載波相位平滑偽距遞推公式為
(5)

本文選擇雙頻平滑改正模型處理電離層延遲。對比缺少實際觀測量的電離層延遲經驗改正模型,雙頻GNSS接收機可利用偽距觀測值和載波相位觀測值中的電離層信息計算得到更精確的延遲改正量;在最壞情況下,誤差一般也只為數毫米[14]。同時考慮到偽距觀測值計算的電離層延遲量噪聲大、精度較差,載波相位觀測值受整周模糊度參數限制只能得到相對改正量[15],建立該模型常用到的觀測值為經載波相位平滑處理后的偽距觀測值。以P1碼為例,類似式(5)可得到歷元s時刻的電離層延遲改正量為
(6)

在討論一系列數據分布的離散程度時,常用到的評估指標是標準差(standard deviation,Std),其計算公式為
(7)
2 實驗與結果分析
2.1 實驗模型及參數估計方法
實驗采用MGEX 6個站多天的數據,每天共2 853個連續歷元的GPS、BDS和Galileo觀測量,采樣間隔為30 s。
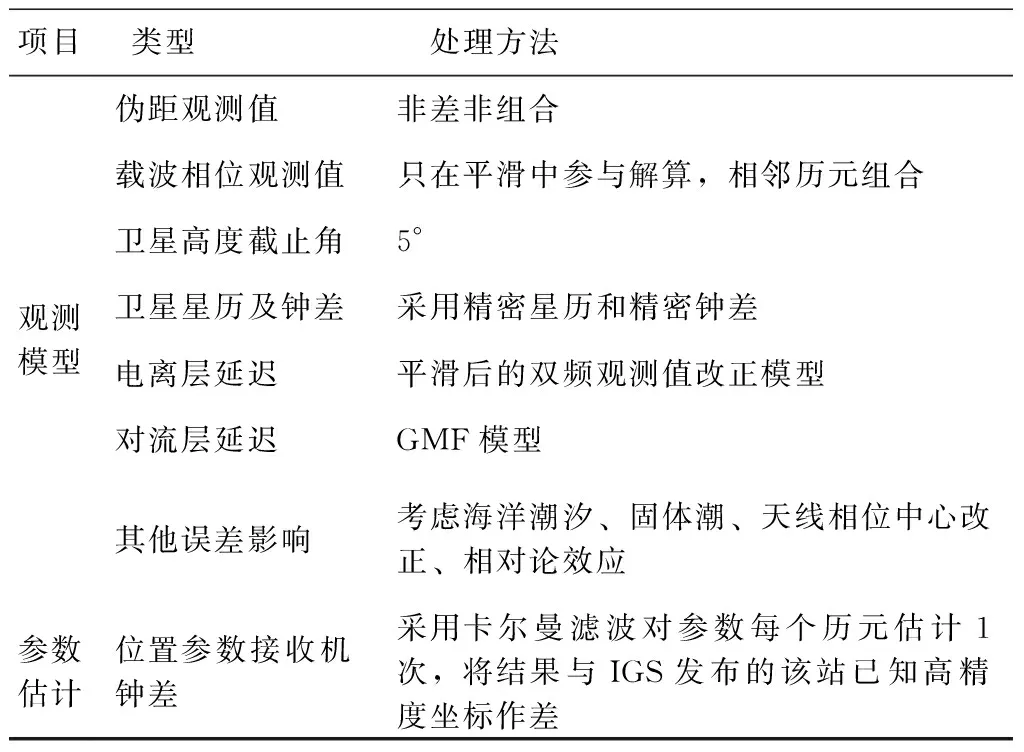
表1 觀測模型及參數估計設置
2.2 可見衛星數量分析
以CUT0站和KIRU站為例,設置年積日(day of year,DOY),取DOY為第327天,分別計算3個系統下當天任意時刻的可見衛星數,如圖1所示。
從圖中可以看出:GPS系統可見衛星數量是3個系統中最多的,衛星數最少的時候也有7顆,比大部分時候另外2個系統的可見衛星數均要多;而BDS系統和Galileo系統在某些時刻會出現可見衛星數極少的情況,甚至只有1顆,很難保證其定位精度,這也是目前BDS系統和Galileo系統定位精度提升受限的一個重要原因。
為更直觀地比較3個系統可見衛星數差異,分別統計了第327天、第328天、第329天不同系統不同地區測站的平均可見衛星數量,如表2所示。
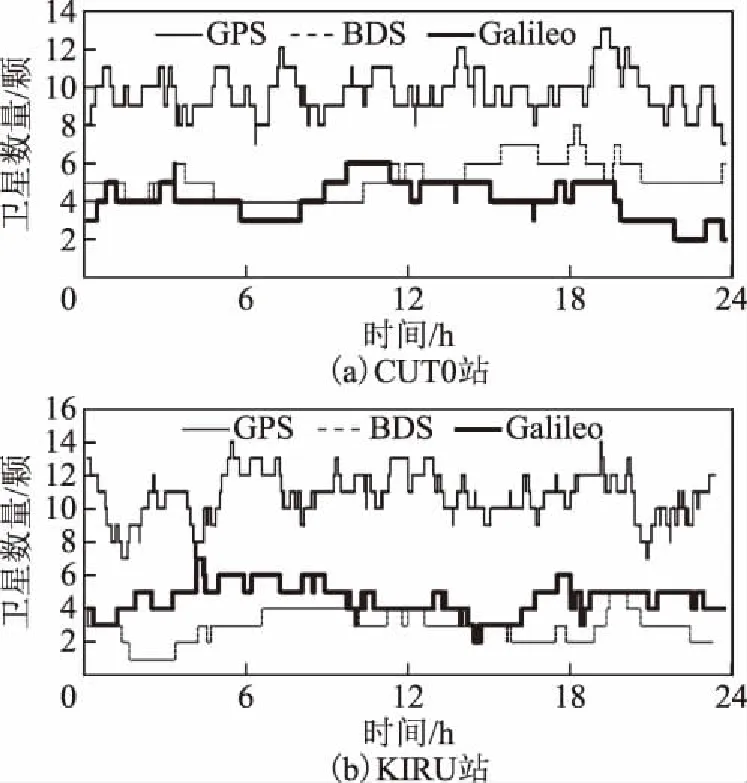
圖1 CUT0和KIRU站GPS、BDS、Galileo可見衛星數量
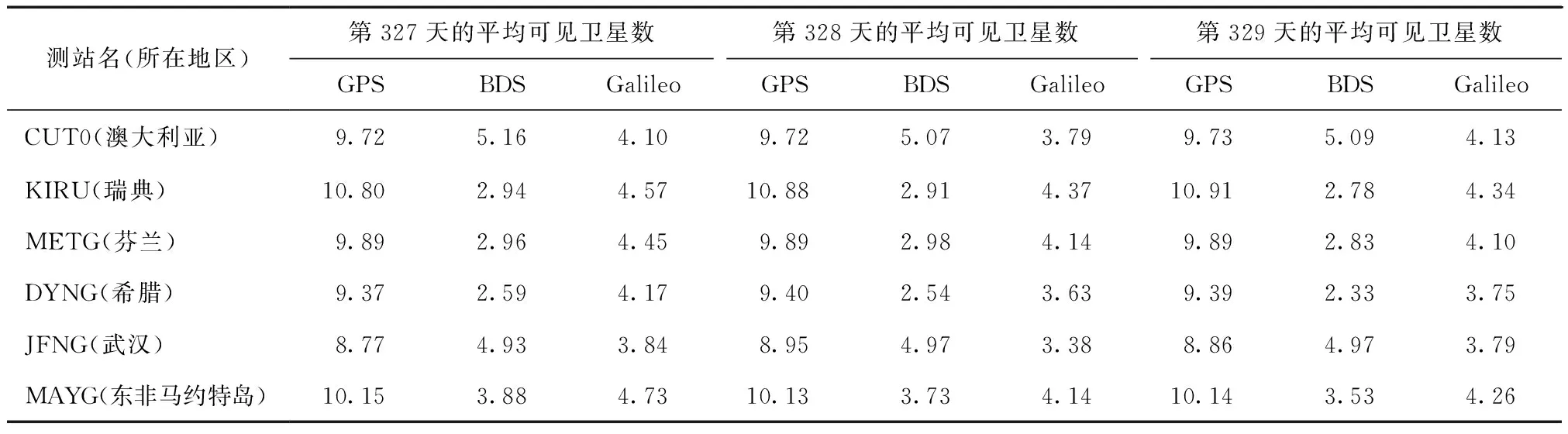
表2 不同系統平均可見衛星數對比 顆
從表2中可以看出:不同地區的GPS系統衛星可見數量均遠遠超過另外2個系統,平均可見衛星在9顆以上;Galileo系統在初始服務逐漸啟動后,發射了新的衛星[16],其可見衛星數量目前穩定在3顆以上;除去我國的JFNG站和澳大利亞的CUT0站,Galileo系統各天的可見衛星數量均多于BDS系統,尤其是在BDS衛星可見數量較少的歐洲測站觀測范圍內。對比另外2個系統,BDS系統衛星目前在歐洲地區可見數量較少;相信在BDS系統進一步全球化之后,系統在全球范圍內的可見衛星數量將會得到一定提升。
2.3 平滑前后收斂速度分析
以METG站為例分析平滑前后濾波定位結果的收斂速度。連續3 d的定位解算中,本文在同一系統同一方向上選擇同一收斂條件,即從某一歷元開始至結束歷元的任意時刻中,坐標偏差絕對值均小于所給閾值,則此歷元視為收斂歷元,此時濾波視為收斂。
GPS系統的收斂情況如圖2所示。GPS系統在N、E、U方向上設定的收斂閾值分別為3、1、3 m。
從圖中可以看出,連續3 d的時間里:N方向上濾波平滑前至少需要9.7 h才能達到收斂條件;U方向上3 d平滑前的定位濾波均未達到收斂條件,平滑后所有歷元坐標偏差絕對值均小于閾值;E方向上平滑前至少需要9.4 h濾波才能達到收斂條件,平滑后最多只需要8.4 h。3個方向上平滑后收斂速度均有明顯提升。
BDS系統的收斂情況如圖3所示。BDS系統在N、E、U方向上設定的收斂閾值分別為10、3、5 m。
從圖中可以看出,連續3 d的時間里:N方向上平滑前至少需要8.3 h濾波才能達到收斂條件,平滑后最多只需要4 h;E方向上平滑后至多能將收斂時間減少8.2 h;U方向上定位濾波在平滑后至多提前了4.6 h達到收斂條件。對比GPS系統,平滑對收斂速度的影響稍小。
Galileo系統的收斂情況如圖4所示。Galileo系統在N、E、U方向上設定的收斂閾值分別為5、2、5 m。
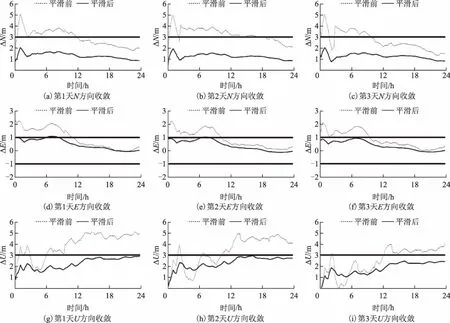
圖2 GPS系統連續3 d METG站平滑前后收斂速度對比
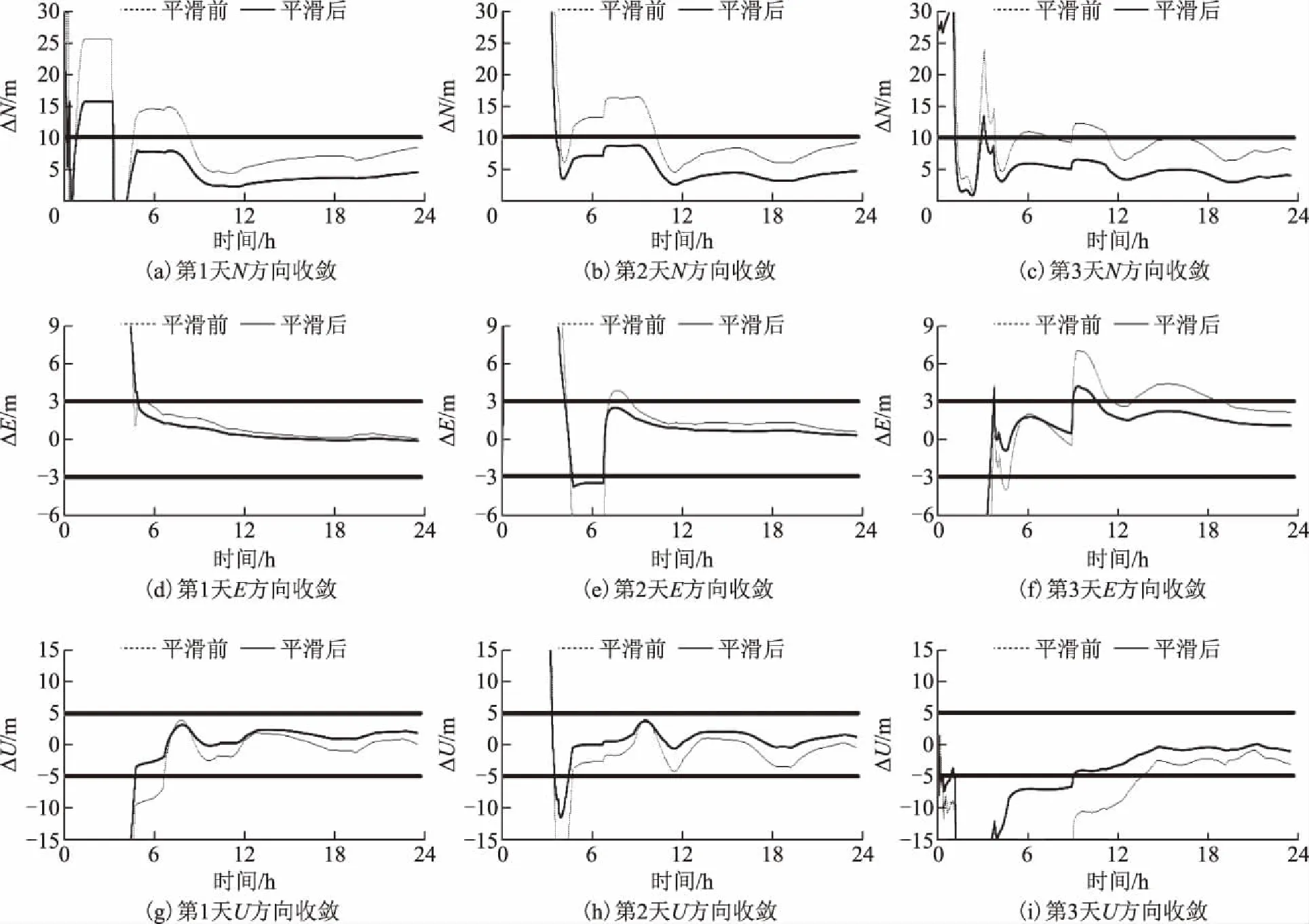
圖3 BDS系統連續3 d METG站平滑前后收斂速度對比
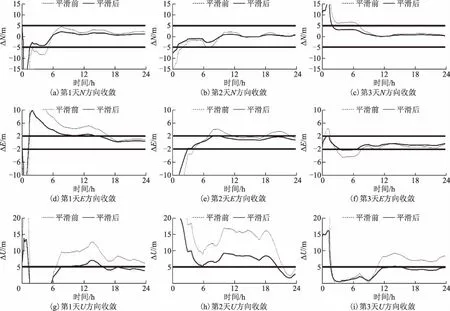
圖4 Galileo系統連續3 dMETG站平滑前后收斂速度對比
從圖4中可以看出,連續3 d的時間里:N方向和E方向上濾波平滑后分別至少提前了3.5、1.9 h達到收斂條件,平滑后E方向上濾波收斂至多能提前13.9 h;U方向上平滑前有2 d的定位濾波未達到收斂條件,平滑后定位濾波均能收斂,而平滑前能收斂的定位濾波平滑后提前了1.1 h收斂。Galileo系統平滑前后收斂速度的提升效果好于BDS系統,但仍然差于GPS系統。
計算各站平滑前后收斂速度的加速比如表3所示。對于部分測站在某些方向上平滑前未收斂到閾值或者平滑后所有歷元坐標偏差絕對值均小于閾值的情況,其加速比用橫線表示。
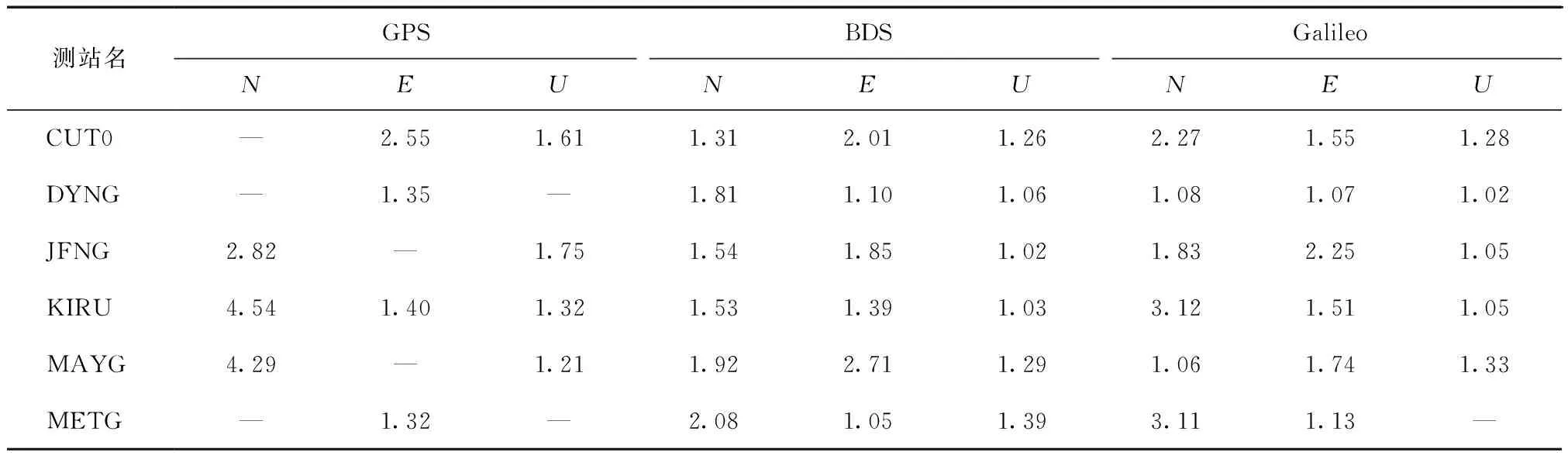
表3 3個系統各站平滑前后收斂加速比
由表3中數據可知:3個系統平滑后濾波收斂速度均有所提升;其中,較之另外2個系統,GPS系統收斂速度在平滑前后提升最明顯;對比3個方向,N方向較之E、U方向,平滑前后收斂速度提升效果較明顯;平滑前定位濾波不能收斂的情形在平滑后均得到很好的改善,當天能夠收斂。
2.4 平滑前后定位精度分析
以MAYG站為例,分別計算3個系統下該站在年積日第327天全天任意歷元N、E、U方向上的定位偏差,如圖5所示。
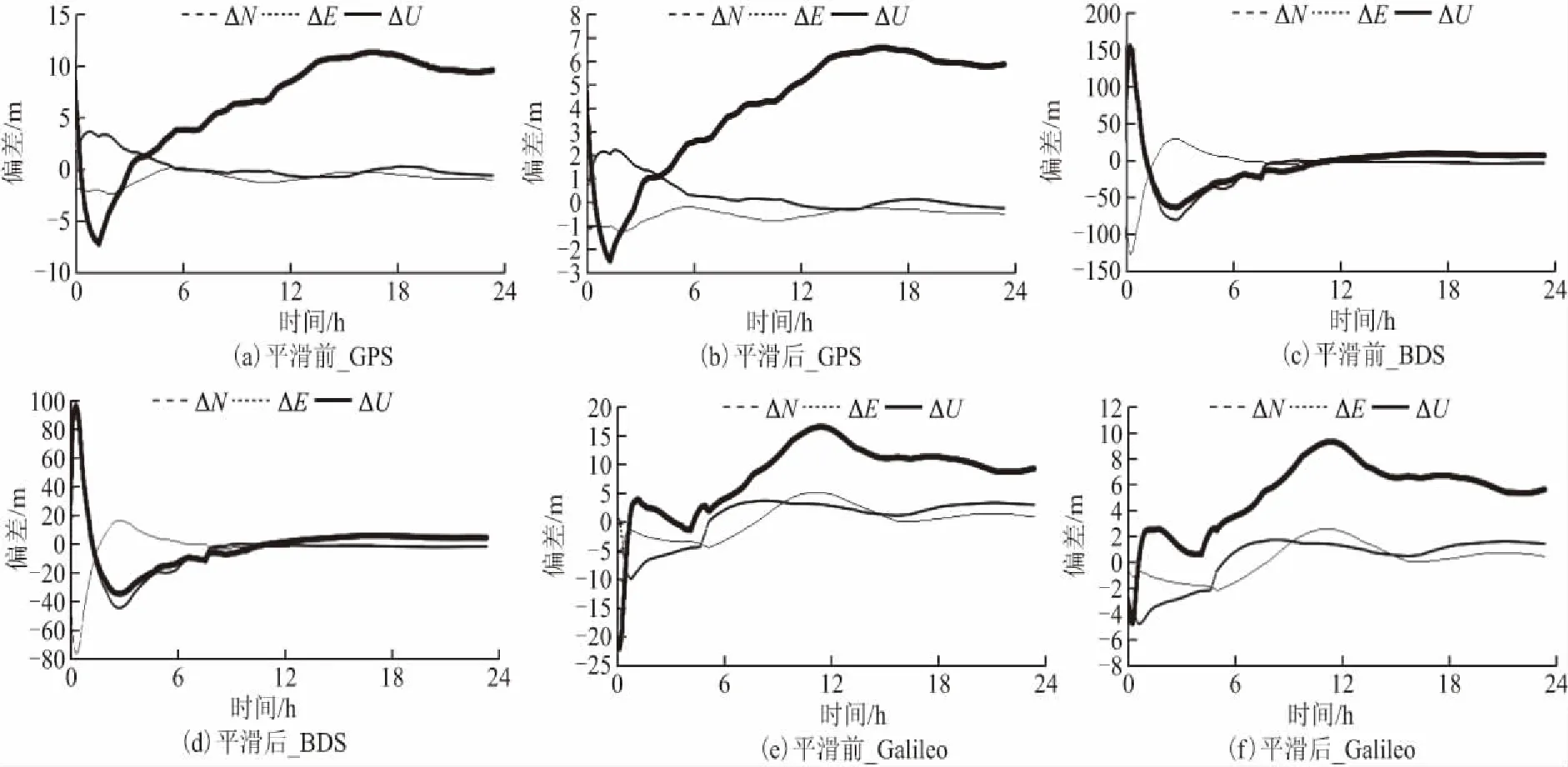
圖5 3個系統MAYG站平滑前后定位結果對比
從圖5中可以看出,平滑前后:GPS系統3個方向上的定位結果區間從[-10,15]縮小到[-3,8];BDS系統3個方向上的定位結果區間從[-150,200]縮小到[-80,100];Galileo系統3個方向上的定位結果區間從[-25,20]縮小到[-8,12],3個系統平滑后全天的定位結果坐標偏差波動區間均縮小了接近50 %。
為更直觀地對比平滑前后定位結果,本文將定位時段最后一個歷元的坐標偏差絕對值視為整個時段的整體定位精度指標。圖6為3個系統下DYNG站在年積日第327天N、E、U3個方向上的定位結果精度對比。
由圖可知,平滑后3個系統下該站在任一方向上的定位精度均有提高;其中所有系統的U方向平滑后精度均明顯提高;GPS系統下該站在U方向上平滑后精度改善最明顯。
統計3個系統各站第327天平滑前后的定位精度變化并加入標準差的對比,可得如表4、表5、表6所示的結果。
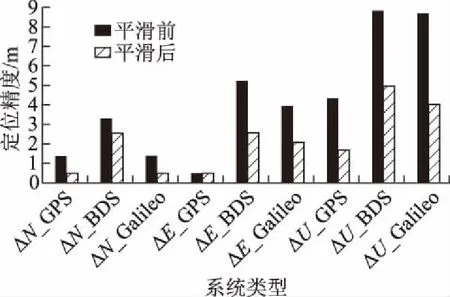
圖6 3個系統DYNG站平滑前后定位結果精度對比
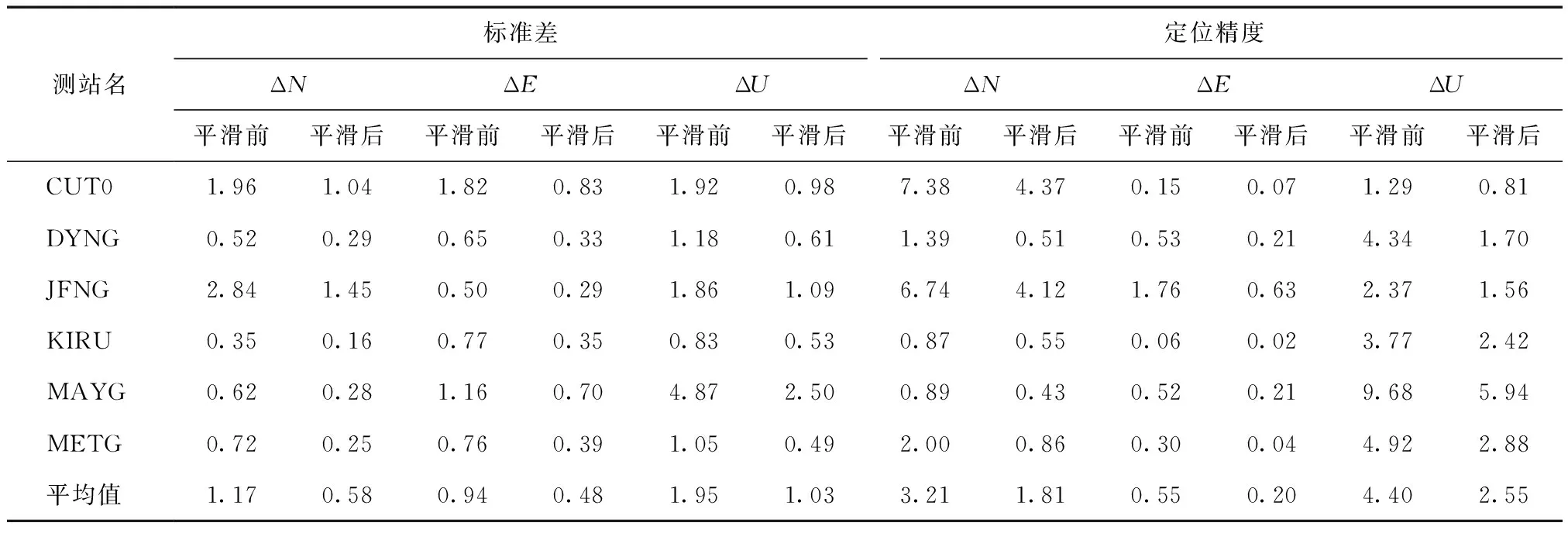
表4 GPS系統各站平滑前后標準差及定位精度對比 m
由表中數據可知,所有測站的定位結果在平滑后精度均有所提高,標準差均減小。3個系統的三維定位結果精度從5.47、10.14、6.69 m提升到3.13、5.66、3.63 m,分別提高了1.75、1.79、1.84倍。其中,BDS系統平滑前定位結果精度較差,平滑后得到很好的改善。平滑前,GPS系統整體定位結果標準差最小,BDS系統整體定位結果標準差最大,造成這一現象的原因可能是BDS觀測噪聲偏大。平滑后,3個系統各方向的測站標準差平均值均減小了45 %以上,說明經平滑處理后,24 h內濾波定位分布的波動減小,明顯的跳躍減少,結果更加穩定。其中,Galileo系統各方向的標準差減小率均達到50 %,平滑對濾波定位結果穩定性的提高最明顯。
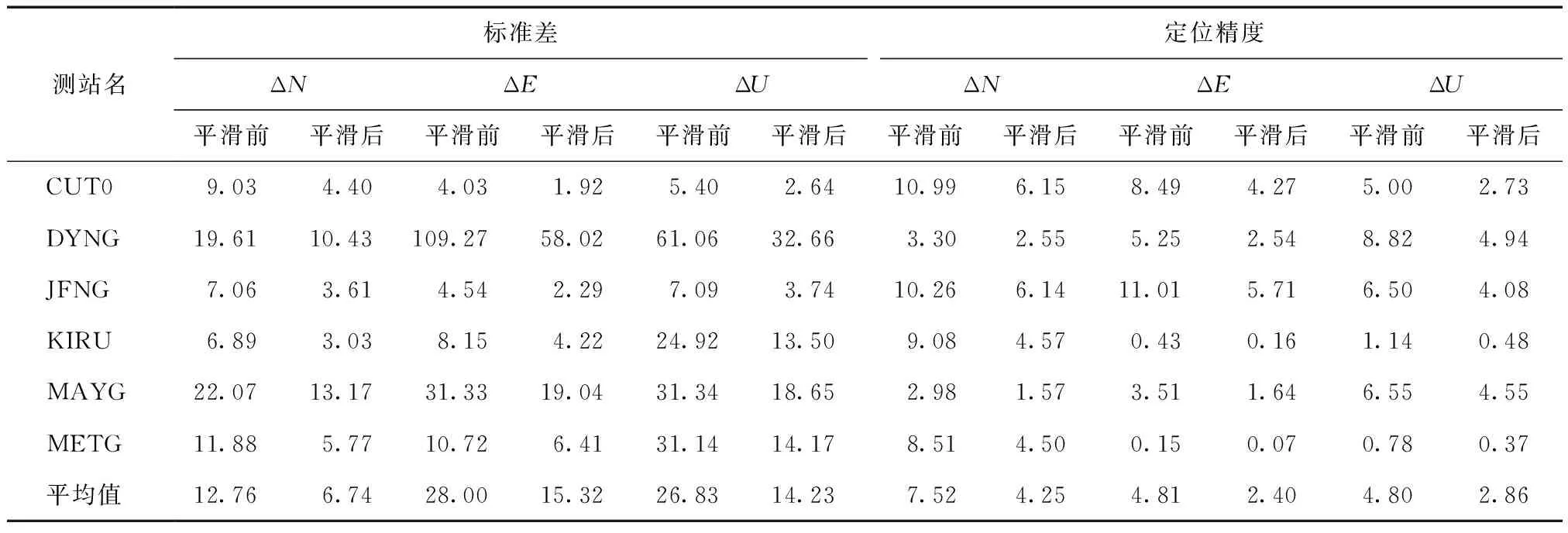
表5 BDS系統各站平滑前后標準差及定位精度對比 m
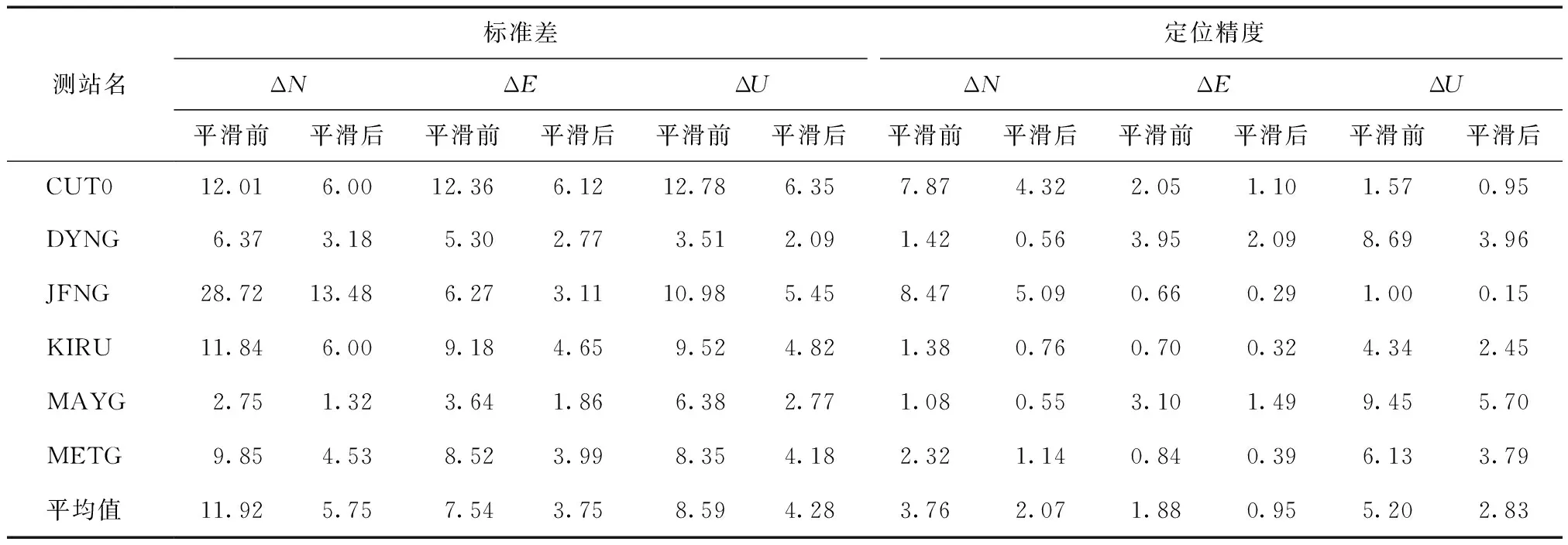
表6 Galileo系統各站平滑前后標準差及定位精度對比 m
本文還將每天24 h的觀測數據按6 h分時段分別進行定位解算,用于分析平滑效果的穩定性。將同一系統下,所有測站每天6 h時段最后一個歷元的定位結果偏差絕對值取平均值,作為當天該系統6 h的定位精度指標;同一系統下,所有測站每天6 h時段的標準偏差取平均值,作為當天該系統6 h的濾波標準差。結果如表7~表9所示。
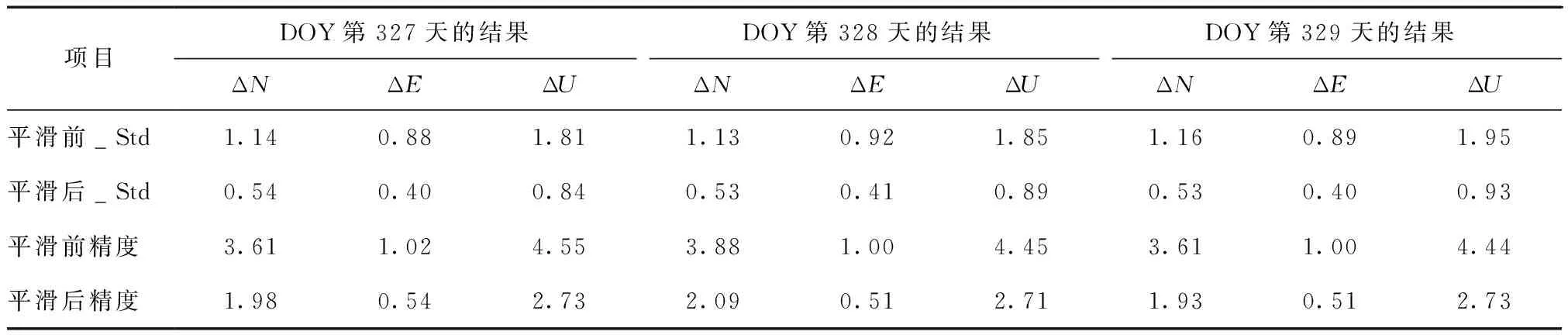
表7 GPS系統6 h時段平滑前后標準差及定位精度對比 m
從表中可以看出,對于6 h時段3個系統的定位結果,平滑后其標準差均有明顯減小,定位精度均有較大幅度提高。比較3個系統,其中GPS系統在平滑前水平方向和高程方向上精度優于5 m,各方向標準差在2 m以內,濾波結果穩定,明顯的跳躍少,定位精度最高;BDS系統標準差最大,結果穩定性較差,濾波波動大;Galileo系統水平方向上精度優于BDS系統,高程方向上精度更差,整體結果穩定性優于BDS系統。統計平滑后3個系統2項指標變化的百分比如圖7所示。
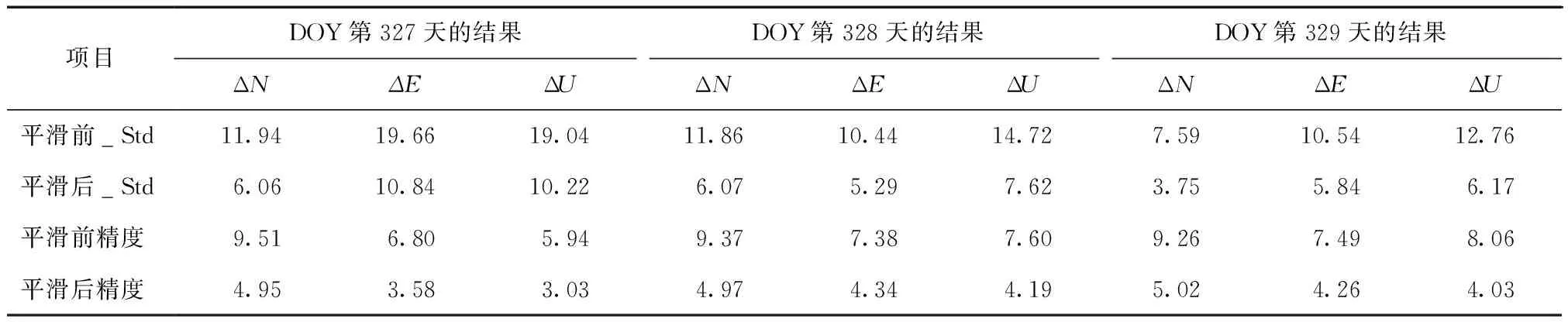
表8 BDS系統6 h時段平滑前后標準差及定位精度對比 m
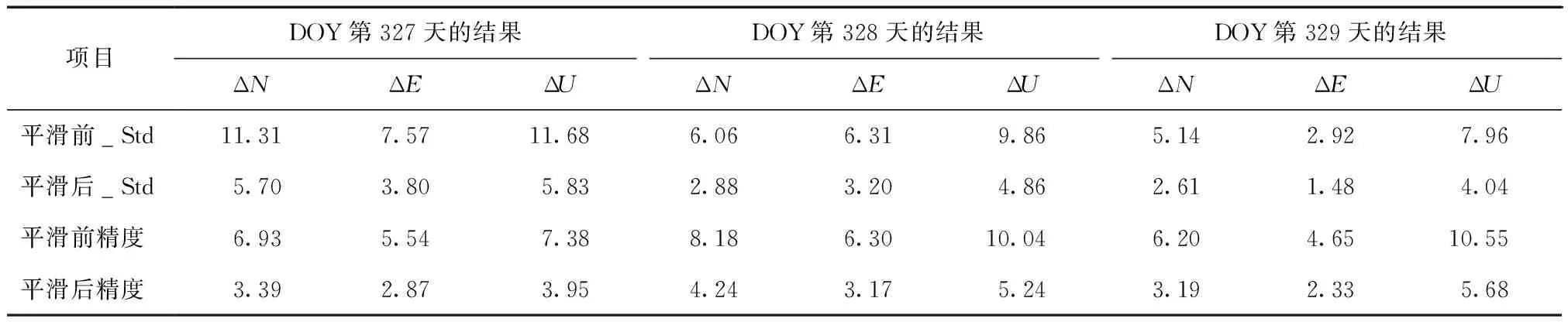
表9 Galileo系統6 h時段平滑前后標準差及定位精度對比 m
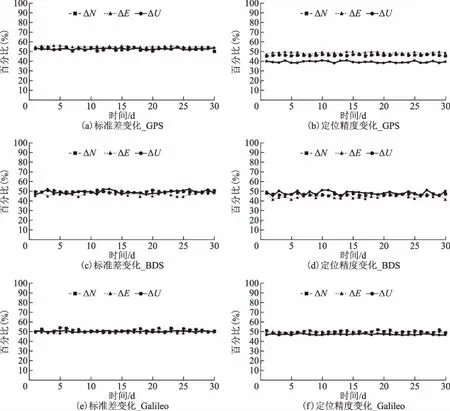
圖7 3個系統連續30 d平滑前后標準差及定位精度變化
比較連續1個月的平滑效果,3個系統平滑后的標準差減小率和定位精度提高率都非常穩定,說明平滑對定位結果的影響隨時間變化具有一定的穩定性和延續性。
3 結束語
本文以雙頻載波相位平滑偽距原理為依據,分析對比了GPS、BDS、Galileo系統衛星可見數量、載波相位平滑偽距前后定位結果的收斂速度和精度。實驗采用6個MGEX站多天的實測數據和精密星歷及鐘差文件,分別進行了偽距單點定位和載波相位平滑偽距單點定位解算,得出了以下結論:
1)GPS系統可見衛星數量最多,所有測站3 d的平均可見數量接近10顆;Galileo系統所有測站3 d的平均可見衛星數量在4顆以上;BDS系統在一些歐洲測站的可見衛星數量較少,影響其系統的定位結果。
2)3個系統的定位濾波收斂速度經平滑后均有所提高,未收斂的濾波經平滑后能夠收斂。其中GPS系統提升最明顯,部分測站定位濾波經平滑后所有歷元坐標偏差絕對值均小于閾值。對比3個方向可知,N方向上收斂速度提升最明顯。
3)平滑能明顯提高濾波結果的定位精度,減小其標準差;GPS、BDS、Galileo系統的定位精度分別提高了1.75、1.79、1.84倍;平滑后,濾波結果穩定性更好,明顯的跳躍和波動減少,Galileo系統各方向上的標準差均能減小50 %以上;將觀測數據按6 h分時段解算,分析連續1個月的解算結果,發現平滑效果具有很好的穩定性和延續性。
[1] HATCH R.The synergism of GPS code and carrier measurements[C]//Defense Mapping Agency and National Ocean Survey.Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning.Las Cruces,New Mexico:Physical Science Laboratory of the New Mexico State University,1982:1213-1232.
[2] 陳思.一種雙頻載波相位平滑偽距算法的分析與實現[J].科技信息,2010(23):945-946.
[3] 趙勝,魏亮,段召亮.GNSS接收機的偽距平滑技術研究[J].無線電工程,2010,40(4):32-34.
[4] 李朋,徐博,劉文祥,等.基于載波相位平滑偽距的卡爾曼濾波定位方法[J].全球定位系統,2013,38(4):16-19.
[5] 唐衛明,劉智敏.GPS載波相位平滑偽距精度分析與應用探討[J].測繪地理信息,2005,30(3):37-39.
[6] 胡耀坤,王偉,李斌.北斗多頻載波平滑濾波的運用[C]//中國衛星導航系統管理辦公室學術交流中心.第四屆中國衛星導航學術年會論文集.北京:中國衛星導航系統管理辦公室,2013:6-10.
[7] 隋葉葉,楊小江,柳濤.載波相位平滑偽距算法研究與精度分析[J].電子設計工程,2013,21(8):112-115.
[8] 李岑,黃智剛,王曙闊,等.載波相位平滑偽距在GPS單點定位中的應用[C]//中國衛星導航系統管理辦公室學術交流中心.第二屆中國衛星導航學術年會論文集.北京:中國衛星導航系統管理辦公室,2011:7-12.
[9] 劉斌,王園,李志剛.北斗單頻相位平滑偽距精度分析[J].測繪技術裝備,2014,16(3):94-96.
[10] 劉瑞華,楊兆寧,詹先龍.北斗系統載波相位平滑偽距研究[J].中國民航大學學報,2012,30(3):28-31.
[11] 范士杰,孔祥元.基于Hatch濾波的GPS偽距相位平滑及其在單點定位中的應用[J].勘察科學技術,2007(4):40-42.
[12] 劉俊,何秀鳳,張文曉.采用相位平滑偽距方法研究兩種衛星導航系統組合定位的精度[J].導航定位學報,2013,1(4):11-13.
[13] 劉長建.GNSS電離層建模方法與質量控制研究[D].鄭州:信息工程大學,2011:24-28.
[14] 李征航,趙曉峰,蔡昌盛.全球定位系統(GPS)技術的最新進展第五講:利用雙頻GPS觀測值建立電離層延遲模型[J].測繪地理信息,2003,28(1):41-44.
[15] 王旭峰.基于GPS/BDS導航系統電離層建模研究[D].徐州:中國礦業大學,2016:12-17.
[16] ESA.Galileo begins serving the globe[EB/OL].(2016-12-15)[2017-01-01].http://www.esa.int/Our_Activities/Navigation/Galileo_begins_serving_the_globe.html.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
