
基于桁架的多網絡遠程控制相機精準移動方法
2018-06-12 06:41:20劉昱顯來智勇石復習田建州
現代電子技術 2018年12期
劉昱顯 來智勇 石復習 田建州
摘 要: 提出一種多網絡遠程控制方法,以平行四桿結構桁架為載臺,基于STM32F407芯片設計步進電機驅動電路和反饋信號采集電路。通過4G網絡、W5200網絡模塊、OneNET平臺組網實現專家端口和數據中心交互控制網絡相機精準定位的功能。根據實時性和精準性設計網絡控制方案,并提出相機定位公式。為使水平移動誤差控制在5%內,綜合考慮靈敏度、穩定性、移動誤差,設定電機速度為2.0 cm/s。調整參數改善網絡通信并統計流量消耗,最終設定系統異常重啟時長為30 s,W5200網絡通信定時參數為5 s,W5200網絡異常重啟時長為10 s,每小時消耗流量3~4 MB。
關鍵詞: 多網絡; 平行四桿桁架; 步進電機; 交互控制; W5200網絡; 相機定位
中圖分類號: TN711?34; TP273.5 文獻標識碼: A 文章編號: 1004?373X(2018)12?0006?04
Abstract: A multi?network remote control method is proposed. With the parallel four?bar structure truss as the platform, the stepper motor drive circuit and feedback signal acquisition circuit are designed based on the STM32F407 chip. The accurate positioning function of the network camera interactively controlled by the expert port and data center is realized by means of the networking of 4G network, W5200 network module, and OneNET platform. Network control scheme is designed according to the real?time and precision performances, and the camera positioning formula is put forward. To control the horizontal movement error within 5%, the motor speed is set to 2.0 cm/s, comprehensively considering the sensitivity, stability and movement error. Network communications is improved by adjusting parameters, and traffic consumption statistics is obtained. The abnormal restart time duration of the system is set to 30 s, the timing parameter of W5200 network communications is set to 5 s, and the abnormal restart time duration of W5200 network is set to 10 s, with 3~4 MB traffic consumed per hour.
Keywords: multi?network; parallel four?bar truss; stepper motor; interactive control; W5200 network; camera positioning
0 引 言
基于T型桁架應用網絡通信和步進電機控制技術設計的作物監測系統實現了遠程多點監測[1],但存在以下問題:第一、僅使用有線網絡在農田部署的成本和維護代價較高,且難以實現跨網交互實時控制;第二、T型桁架垂直導桿搭載步進電機震動嚴重影響網絡相機運動穩定性,且運動方式不靈活;第三、不能精準定位和實時反饋網絡相機位置。龔金成等對步進電機的網絡控制策略、通信方式和安全控制等方面進行了研究,采用在遠程客戶端實時操控電機的方法[2]。4G網絡無需布線、傳輸速度高、實時性好 [3],謝相博等基于4G設計的無人機巡航系統實現了遠程飛行控制和準確反饋飛行信息[4]。無線網絡對TCP擁塞控制具有挑戰性,國內外多是從擁塞控制算法方面改進以提高TCP通信性能[5],為應對互聯網擁塞控制異質性,Wang Z等提出了一種INVS的新型TCP協議[6]。由于網絡通信中存在多種網絡結構,基于TCP協議跨平臺通信會導致很多問題,而基于物聯網平臺可解決該問題,石棟等設計的老人活動監測系統可通過手機APP或物聯網云平臺查看 [7];袁穎等為研究環境參數對光伏電站的影響利用Yeelink平臺實現上位機監測[8]。本文通過專家端口和數據中心利用OneNET平臺、W5200硬件TCP/IP協議棧、4G網絡組網實現多網絡交互控制步進電機精準定位,設計平行四桿結構桁架并研究步進電機的網絡控制策略。
1 系統設計
1.1 平行四桿結構桁架設計
所設計桁架采用單軌雙電機協同驅動,以增強縱向穩定性,平行四桿結構桁架如圖1所示,網絡相機運動路徑更加靈活。
1.2 步進電機精準定位設計
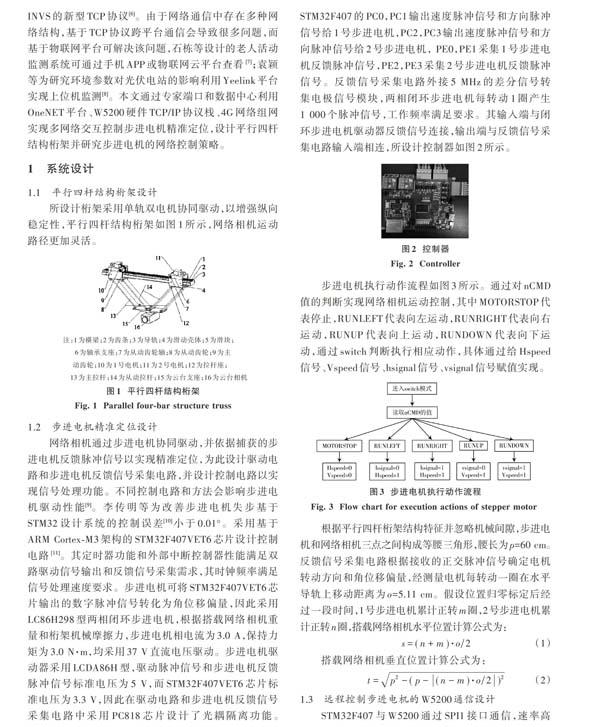
網絡相機通過步進電機協同驅動,并依據捕獲的步進電機反饋脈沖信號以實現精準定位,為此設計驅動電路和步進電機反饋信號采集電路,并設計控制電路以實現信號處理功能。不同控制電路和方法會影響步進電機驅動性能[9]。李傳明等為改善步進電機失步基于STM32設計系統的控制誤差[10]小于0.01°。采用基于ARM Cortex?M3架構的STM32F407VET6芯片設計控制電路 [11]。其定時器功能和外部中斷控制器性能滿足雙路驅動信號輸出和反饋信號采集需求,其時鐘頻率滿足信號處理速度要求。步進電機可將STM32F407VET6芯片輸出的數字脈沖信號轉化為角位移偏量,因此采用LC86H298型兩相閉環步進電機,根據搭載網絡相機重量和桁架機械摩擦力,步進電機相電流為3.0 A,保持力矩為3.0 N·m,均采用37 V直流電壓驅動。步進電機驅動器采用LCDA86H型,驅動脈沖信號和步進電機反饋脈沖信號標準電壓為5 V,而STM32F407VET6芯片標準電壓為3.3 V,因此在驅動電路和步進電機反饋信號采集電路中采用PC818芯片設計了光耦隔離功能。STM32F407的PC0,PC1輸出速度脈沖信號和方向脈沖信號給1號步進電機,PC2,PC3輸出速度脈沖信號和方向脈沖信號給2號步進電機, PE0,PE1采集1號步進電機反饋脈沖信號,PE2,PE3采集2號步進電機反饋脈沖信號。反饋信號采集電路外接5 MHz的差分信號轉集電極信號模塊,兩相閉環步進電機每轉動1圈產生1 000個脈沖信號,工作頻率滿足要求。其輸入端與閉環步進電機驅動器反饋信號連接,輸出端與反饋信號采集電路輸入端相連,所設計控制器如圖2所示。
1.3 遠程控制步進電機的W5200通信設計
STM32F407與W5200通過SPI1接口通信,速率高達80 MHz,可觸發中斷專用發送和接收,并使用DMA進行數據傳輸。為降低網絡通信功耗,W5200采用以太網數據包網絡喚醒模式,其以太網接口與4G無線路由器通過網線連接,在軟件中設置網絡參數并通過HTTP報文協議與OneNET服務器雙向通信。分析網絡通信過程:專家端口或數據中心通過OneNET服務器傳遞控制命令,W5200通過4G網絡連接OneNET服務器獲取網絡相機運動控制命令,并由STM32F407解析和驅動步進電機轉動實現網絡相機精準移動。STM32F407定時將網絡相機在桁架坐標體系中的位置信息通過W5200和4G網絡傳遞到OneNET服務器,專家端口和數據中心均通過OneNET服務器獲取網絡相機的最新位置。每條控制指令和反饋數據通過該組網方案進行傳輸在如下過程產生延時:路由處理、OneNET處理、W5200處理。無線網絡延時和故障難以避免,增加了對實時性要求較高的步進電機精準移動控制難度,為此設計的通信流程如圖4所示。
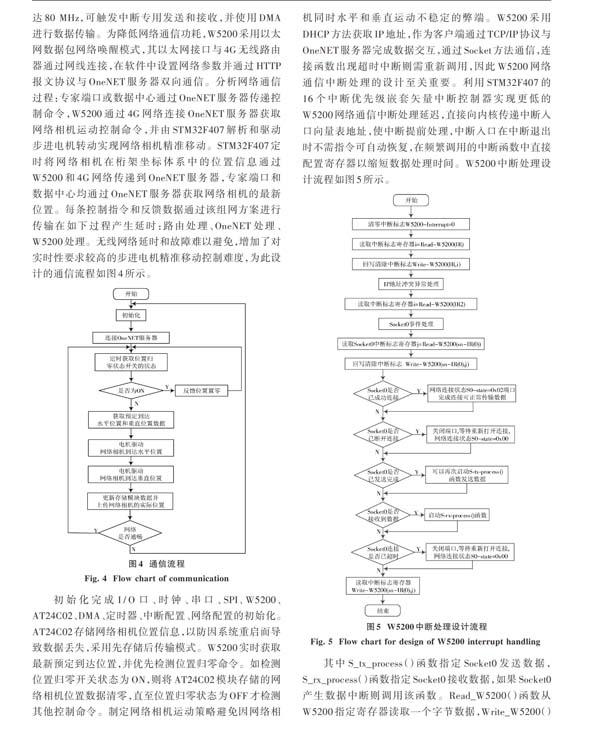
初始化完成I/O口、時鐘、串口、SPI、W5200、AT24C02、DMA、定時器、中斷配置、網絡配置的初始化。AT24C02存儲網絡相機位置信息,以防因系統重啟而導致數據丟失,采用先存儲后傳輸模式。W5200實時獲取最新預定到達位置,并優先檢測位置歸零命令。如檢測位置歸零開關狀態為ON,則將AT24C02模塊存儲的網絡相機位置數據清零,直至位置歸零狀態為OFF才檢測其他控制命令。制定網絡相機運動策略避免因網絡相機同時水平和垂直運動不穩定的弊端。W5200采用DHCP方法獲取IP地址,作為客戶端通過TCP/IP協議與OneNET服務器完成數據交互,通過Socket方法通信,連接函數出現超時中斷則需重新調用,因此W5200網絡通信中斷處理的設計至關重要。利用STM32F407的16個中斷優先級嵌套矢量中斷控制器實現更低的W5200網絡通信中斷處理延遲,直接向內核傳遞中斷入口向量表地址,使中斷提前處理,中斷入口在中斷退出時不需指令可自動恢復,在頻繁調用的中斷函數中直接配置寄存器以縮短數據處理時間。W5200中斷處理設計流程如圖5所示。
其中S_tx_process()函數指定Socket0發送數據, S_rx_process()函數指定Socket0接收數據,如果Socket0產生數據中斷則調用該函數。Read_W5200()函數從W5200指定寄存器讀取一個字節數據,Write_W5200()函數向W5200指定寄存器寫數據,其底層實現使用了SPI1通信方式。
2 系統測試和分析
經測試步進電機協同驅動過程中無明顯啟動和停止時間差,電機轉速越慢網絡相機晃動幅度越小。實施了網絡相機移動誤差測試,設定水平預定位置為50.0 cm,測試不同速度模式下水平移動誤差,經過80次測試平均誤差如表1所示。
為了使水平移動誤差控制在5%內,綜合考慮控制靈敏度、網絡相機運動穩定性、移動誤差要求,最終設定電機速度為2.0 cm/s。該速度模式滿足遠程控制網絡相機通過桁架進行多點監控的要求。通過調整參數改善網絡通信性能并統計流量消耗情況。4G無線路由器采用華為B315S?936型,網絡協議是IEEE 802.11b/g/n。經過實驗,最終確定系統異常定時重啟時長為30 s,W5200獲取OneNET服務器最新數據定時參數為5 s,W5200網絡異常重啟時長為10 s,網絡相機位置反饋時間間隔為5 s。在該情況下,4G無線路由器每小時消耗流量3~4 MB。

3 結 語
本文研究了一種基于平行四桿桁架的多網絡遠程控制網絡相機精準移動的方法,采用OneNET平臺、W5200硬件TCP/IP協議棧、4G網絡組網實現了專家端口和數據中心交互控制網絡相機定位的功能。通過速度、網絡參數調試,使靈敏度、穩定性、移動誤差均滿足網絡相機多點監控的要求。該方法還需對路徑規劃算法和速度智能調節算法進行深入研究。
注:本文通訊作者為來智勇。
參考文獻
[1] 韓文霆,崔利華,陳微,等.桁架式可移動作物生長遠程監控系統設計[J].農業工程學報,2014,30(13):160?168.
HAN Wenting, CUI Lihua, CHEN Wei, et al. Design of movable remote crop monitoring system on fixed truss [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(13): 160?168.
[2] 龔金成,諶建飛,趙丹,等.步進電機遠程控制方案的設計及實現[J].機電工程,2016,33(11):1398?1402.
GONG Jincheng, CHEN Jianfei, ZHAO Dan, et al. Design and implementation of remote control for stepper motor [J]. Journal of mechanical & electrical engineering, 2016, 33(11): 1398?1402.
[3] 王德麾,馮軍帥,宋海亮,等.基于無線傳感器網絡和3G/4G的遠程環境監測系統研究[J].物聯網技術,2015,5(3):17?18.
WANG Dehui, FENG Junshuai, SONG Hailiang, et al. Research of remote environmental monitoring system based on wireless sensor network and 3G/4G [J]. Internet of Things technologies, 2015, 5(3): 17?18.
[4] 謝相博,徐光輝,范凱鑫,等.基于4G的無人機遠程巡邏系統[J].通信技術,2015,48(11):1305?1309.
XIE Xiangbo, XU Guanghui, FAN Kaixin, et al. UAV remote patrol system based on 4G [J]. Communications technology, 2015, 48(11): 1305?1309.
[5] WANG J, WEN J, ZHANG J, et al. TCP?FIT: an improved TCP algorithm for heterogeneous networks [J]. Journal of network & computer applications, 2016, 71: 167?180.
[6] WANG Z, ZENG X, LIU X, et al. TCP congestion control algorithm for heterogeneous Internet [J]. Journal of network & computer applications, 2016, 68: 56?64.
[7] 石棟,張克華,徐彪.獨居老人云智能跌倒實時檢測系統的開發[J].計算機工程與應用,2016,52(19):259?264.
SHI Dong, ZHANG Kehua, XU Biao. Development of cloud intelligent real?time fall detection system for the aged population [J]. Computer engineering and applications, 2016, 52(19): 259?264.
[8] 袁穎,孫榮霞,李瑞,等.基于ZigBee的光伏電站環境實時監測系統[J].微型機與應用,2017,36(3):33?35.
YUAN Ying, SUN Rongxia, LI Rui, et al. Real?time monitoring system for photovoltaic power station environment based on ZigBee [J]. Microcomputer & its applications, 2017, 36(3): 33?35.
[9] 廖平,韓偉偉.基于STM32多步進電機驅動控制系統設計[J].儀表技術與傳感器,2016(4):71?73.
LIAO Ping, HAN Weiwei. Design of Drive control system of multiple stepper motors based on STM32 [J]. Instrument technique and sensor, 2016(4): 71?73.
[10] 李傳明,崔更申,尹鵬,等.基于STM32F4的電機控制系統設計[J].計算機測量與控制,2015,23(10):3370?3372.
LI Chuanming, CUI Gengshen, YIN Peng, et al. Design of motor control system based on STM32F4 [J]. Computer measurement & control, 2015, 23(10): 3370?3372.
[11] 趙科,李常賢,張彤.基于STM32的無線溫濕度控制器[J].化工自動化及儀表,2015,42(6):629?633.
ZHAO Ke, LI Changxian, ZHANG Tong. Design of wireless temperature and humidity controller based on STM32 [J]. Control and instruments in chemical industry, 2015, 42(6): 629?633.
