兩級式光伏并網逆變器的非線性控制系統設計
2018-06-12 06:41:20于國慶段高磊
現代電子技術 2018年12期
于國慶 段高磊
摘 要: 傳統兩級式光伏并網逆變器控制策略存在系統無效損耗過大、系統控制效率低下等問題。為了有效解決此問題,設計新型兩級式光伏并網逆變器的非線性控制系統。通過系統結構設計、光伏并網逆變器非線性控制進網電流環設計、非線性控制系統直流母線電壓環設計,完成系統硬件設計。通過兩級式光伏非線性控制側功率解耦電容設計、系統母線電容設計、系統Boost電感設計,完成系統軟件設計。模擬新型系統運行環境,設計對比實驗結果表明,與傳統兩級式光伏并網逆變器控制策略相比,新型系統能有效控制無效損耗,大幅提升系統控制效率。
關鍵詞: 兩級式光伏; 并網逆變器; 控制系統; 進網電流環; 母線電壓環; 解耦電容; Boost電感
中圖分類號: TN964?34; TM464 文獻標識碼: A 文章編號: 1004?373X(2018)12?0108?03
Abstract: As there exist problems such as excessive invalid loss and low control efficiency of the system in the control strategy of the traditional two?stage photovoltaic grid?connected inverter, a nonlinear control system is designed for the new two?stage photovoltaic grid?connected inverter. The hardware design of the system is accomplished by means of the design of the system structure, network current loop for nonlinear control of the photovoltaic grid?connected inverter, and DC bus voltage loop of the nonlinear control system. The software design of the system is accomplished by means of the design of the power decoupling capacitance on the two?stage photovoltaic nonlinear control side, bus capacitance of the system, and Boost inductance of the system. The contrast experiment was carried out by simulating the operating environment of the new system. The results show that in comparison with the control strategy of the traditional two?stage photovoltaic grid?connected inverter, the new system can effectively control the invalid loss and greatly improve the system control efficiency.
Keywords: two?stage photovoltaic; grid?connected inverter; control system; network current loop; bus voltage loop; decoupling capacitance; Boost inductance
光伏發電系統包括離網型光伏發電、并網型光伏發電兩種。其中,離網型光伏發電可細分為有輔助源型、無輔助源型兩大類。總的來說,離網型光伏發電系統的結構相對簡單,對自然環境的污染也相對較小,此種系統大多被應用于對偏遠的島嶼地區進行電力供給。并網型光伏發電系統,必須外接逆變器負載,并通過此裝置直接與電網相連,產生集中式供電和分散式供電。其中,集中式光伏供電系統的變現形式,包括光伏建筑、光伏發電站等,分散式供電系統主要表現為光伏屋頂。兩級式光伏并網逆變器是光伏發電的能量變換核心單元,對其進行有效的非線性控制,不僅能夠大幅縮減系統的搭建成本,也能保證入網電流的質量及效率等屬性得到大幅度的提升[1?2]。而傳統兩級式光伏并網逆變器控制策略利用PWM調制方式,對所有入網電流進行控制,雖然一定程度上,緩解變換器與母線的入網電流壓力,且這種方法,極易造成系統無效損耗過大、系統控制效率低下等現象的出現。為了降低此類現象的發生幾率,通過對進網電流環、母線電流環、母線電容、Boost電感等結構的改進,完成系統的軟硬件模塊設計。且通過對比實驗的方式,證明新型系統確實比傳統方法,具備更高的實用性價值。
1 系統硬件設計
兩級式光伏并網逆變器非線性控制系統硬件設計由結構設計、進網電流環設計、母線電壓環設計三部分組成,具體搭建過程可按如下步驟進行。
1.1 硬件系統結構設計
兩級式光伏并網逆變器非線性控制系統硬件結構包含光伏陣列、充放電控制器、蓄電池、并網逆變器、負載裝置等模塊 。其中,并網逆變器是負責系統能量變換的核心環節,對系統的運行安全性起到控制作用。光伏陣列可采集到系統非線性控制指令的電信號,并將此信號傳輸至充放電控制器[3?4]。蓄電池與充放電控制器直接相連,既可以向充放電控制器輸送所需的電能,也可以將充放電控制器中多余的電能進行回收存儲。并網逆變器作為充放電控制器的下級結構,與電網負載結構直接相連。
1.2 光伏并網逆變器非線性控制進網電流環設計
兩級式光伏并網逆變器非線性控制系統,硬件進網電流環采用橋臂式開關,保證非線性控制系統的連通性。在每個開關周期內,兩級式光伏并網逆變器始終保持連通狀態,使控制進網電流環開關頻率恒大于基波頻率。光伏并網逆變器非線性控制進網電流環以SPWM原理作為主要搭建依據[5?6]。為了保證電流質量始終維持較高水平,必須令載波信號在相鄰兩個開關周期內,出現兩次峰值,在每次達到峰值時,對進入電流環的進網電流實行非線性控制,已達到系統的控制作用。
1.3 非線性控制系統硬件直流母線電壓環設計
兩級式光伏并網逆變器非線性控制系統硬件直流母線電壓環,前端承接逆變器網側電流。忽略功率損耗的情況下,在全橋逆變器中,對網側電流進行逆變增壓處理,當網側電流達到額定數值時,認定此刻的電壓為直流母線電壓。對直流母線電壓進行輸入逆變處理,求取有效穩壓母線電壓[7]。根據電壓、電流雙環控制原理對母線電壓進行環控處理,完成環控處理的直流母線電壓,會自動按照環狀形態向下傳遞,此環狀結構即為直流母線電壓環。
2 系統軟件設計
上述過程完成系統硬件模塊搭建。為了實現系統的順利運行,還需按照如下步驟完成系統軟件模塊設計。
2.1 兩級式光伏非線性控制側功率解耦電容設計
兩級式光伏并網逆變器非線性控制系統側功率解耦電容設計利用光伏電池的輸出特性曲線。當輸出電壓達到最大功率時,記錄此時的脈動功率為最大波動功率。當輸出電壓達到最小值時,記錄此時的脈動功率為最小光伏功率[8]。系統側功率解耦電容始終在最大波動功率與最小光伏功率間變化,根據每次變化情況的不同,完成系統側功率解耦電容設計。
2.2 非線性控制系統軟件母線電容設計
非線性控制系統軟件母線電容以額定功率為1 kW的電路元件作為標準電容,電網的頻率通常情況下保持在48.5~51.5 Hz之間。當非線性控制系統軟件母線電容滿足上表的約束條件時,母線電容所產生的非線性控制電容電壓波形如圖1所示。
2.3 非線性控制系統軟件Boost電感設計
非線性控制系統軟件Boost電感設計利用電流提供的波頭作為開關頻率的紋波。系統軟件Boost電感決定流過系統電流的高頻紋波總量,故系統軟件Boost電感值的大小直接影響系統的非線性控制穩定性[9]。若系統Boost電感在相鄰兩個周期的變化幅度始終保持平穩狀態,兩級式光伏并網逆變器非線性控制系統也可以保持平穩的非線性控制情況。若系統Boost電感在相鄰兩個周期的變化幅度不能長時間保持平穩狀態時,兩級式光伏并網逆變器非線性控制系統。
3 實驗結果與分析
上述過程完成兩級式光伏并網逆變器非線性控制系統的設計。為了驗證該新型系統確實比傳統系統具備更強的實用性價值。以兩臺配置相同的計算機作為實驗對象,一臺搭載新型系統,作為實驗組;另一臺搭載傳統系統,作為對照組。令兩臺計算機同時模擬系統的運行環境,在保持一段時間的工作狀態后,分別記錄兩組系統的無效損耗情況及系統控制效率[10]。
3.1 實驗參數設置
實驗參數設置如表1所示。表中參數依次代表控制效率、逆變器運行效率、線性控制參數、系統數據總量、并網逆變參數、兩級式光伏參數。其中,線性控制參數與10-8成正比。為了保證實驗的公平性,實驗組與對照組參數始終保持一致。
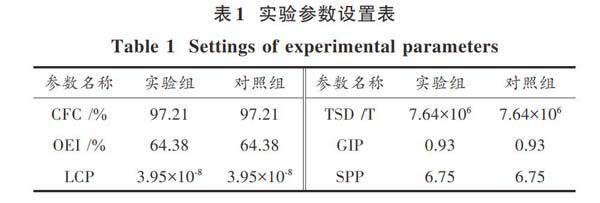
3.2 系統無效損耗對比
兩級式光伏并網逆變器非線性控制系統的無效損耗情況,與PDA指標的變化情況呈正比。當PDA指標增大時,系統的無效損耗也增大,反之則減小。圖2、圖3分別為實驗組、對照組系統的無效損耗情況。對比圖2、圖3可知,實驗組PDA指標隨時間的變化,先增加再減小,最大值僅為32.21%。實驗組系統的無效損耗情況,也隨時間的變化,先增加再減小,最大值僅為36.58%。對照組PDA指標隨時間的變化始終保持增加狀態,最大值達到40.08%。對照組系統的無效損耗情況,也隨時間的變化,始終保持增加狀態,最大值達到49.96%,明顯高于實驗組。所以,可證明應用兩級式光伏并網逆變器非線性控制系統確實可以有效控制無效損耗情況。
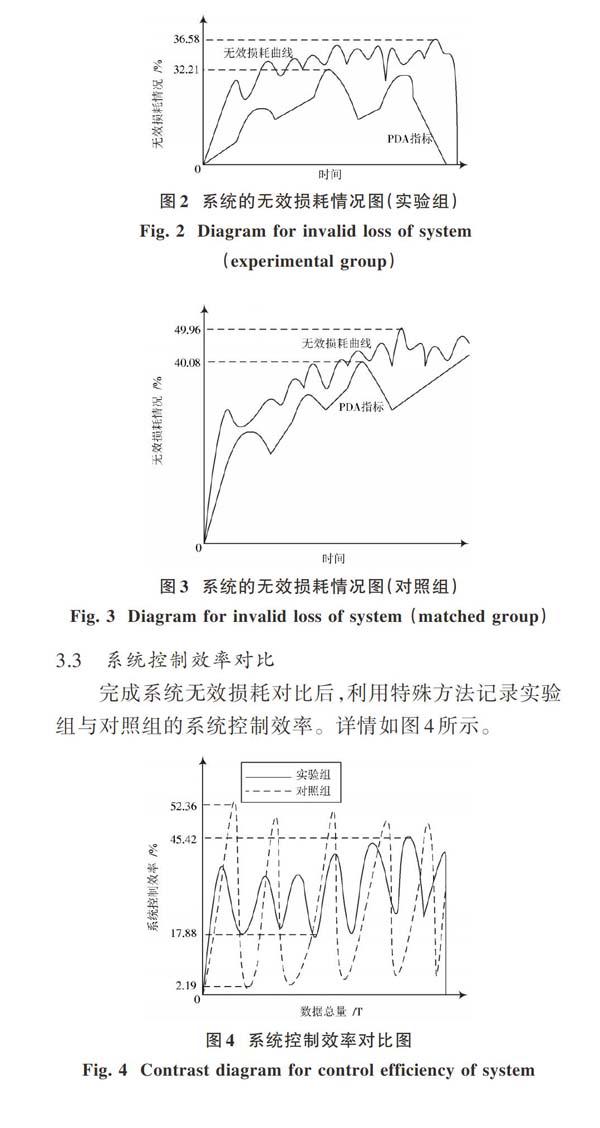
3.3 系統控制效率對比
完成系統無效損耗對比后,利用特殊方法記錄實驗組與對照組的系統控制效率。詳情如圖4所示。
分析圖4可知,實驗組系統控制效率最大值為45.42%,最小值為17.88%,二者間差值為27.54%。對照組系統控制效率最大值為52.36%,最小值為2.19%,二者間差值為50.17%,明顯大于實驗組。系統控制效率最大值與最小值間差值越大,代表系統控制效率越低,非線性控制性能越差。所以,可證明應用兩級式光伏并網逆變器非線性控制系統確實可以大幅提升系統控制效率。
4 結 語
兩級式光伏并網逆變器非線性控制系統的出現,有效改善了原有方法的弊端,提升了無效損耗情況的控制性,并增強非線性控制性能。
參考文獻
[1] 張建華,李楊,吳學禮,等.基于U模型的非線性系統Super?Twisting滑模控制研究[J].河北科技大學學報,2016,37(4):376?381.
ZHANG Jianhua, LI Yang, WU Xueli, et al. Study of Super?Twisting sliding mode control for U model based nonlinear system [J]. Journal of Hebei University of Science and Technology, 2016, 37(4): 376?381.
[2] 程啟明,黃偉,程尹曼,等.雙級矩陣變換器驅動永磁同步電機的混合非線性控制系統[J].電工技術學報,2017,32(4):101?111.
CHENG Qiming, HUANG Wei, CHENG Yinman, et al. Hybrid nonlinear control system of permanent magnet synchronous motor driven by two stage matrix converter [J]. Transactions of China Electrotechnical Society, 2017, 32(4): 101?111.
[3] 徐鳳霞,張雪杰,宋曉輝,等.基于U模型的神經網絡PID控制系統設計[J].齊齊哈爾大學學報(自然科學版),2017,33(6):24?26.
XU Fengxia, ZHANG Xuejie, SONG Xiaohui, et al. Design of radial basis function neural network PID control system based on nonlinear U?model [J]. Journal of Qiqihar University (Natural science edition), 2017, 33(6): 24?26.
[4] 李嘯驄,鄭濤,梁志堅,等.水輪機水門、勵磁與電氣制動系統非線性綜合控制[J].電力自動化設備,2016,36(7):97?103.
LI Xiaocong, ZHENG Tao, LIANG Zhijian, et al. Integrated nonlinear control of hydroturbine governor and excitation & TCBR system [J]. Electric power automation equipment, 2016, 36(7): 97?103.
[5] 王首斌,馬思強,陳文峰,等.基于執行器誤差補償的不確定非線性MIMO系統控制[J].計算機測量與控制,2016,24(3):92?94.
WANG Shoubin, MA Siqiang, CHEN Wenfeng, et al. Nonlinear uncertain MIMO system control based on actuator error compensation [J]. Computer measurement & control, 2016, 24(3): 92?94.
[6] 鮑偉,李成,孔慧芳.雙離合器車輛蠕動和起步非線性無靜差跟蹤控制與仿真[J].中國公路學報,2016,29(3):142?150.
BAO Wei, LI Cheng, KONG Huifang. Non?linear zero steady?state error trace control and simulation of dual?clutch transmission vehicle in creep and launch processes [J]. China journal of highway and transport, 2016, 29(3): 142?150.
[7] 高正中,肖佳宜,申夢茜,等.抑制電力系統低頻振蕩的UPFC控制器設計[J].山東科技大學學報(自然科學版),2017,36(5):91?96.
GAO Zhengzhong, XIAO Jiayi, SHEN Mengqian, et al. UPFC controller design for low frequency oscillation of power system [J]. Journal of Shandong University of Science and Technology (Natural science), 2017, 36(5): 91?96.
[8] 余卓平,章仁夑,熊璐,等.考慮線控轉向非線性和不確定性的轉向角控制[J].同濟大學學報(自然科學版),2017,45(1):79?86.
YU Zhuoping, ZHANG Renxie, XIONG Lu, et al. Steering angle control of steer?by?wire systems considering nonlinear characteristic and uncertainty parameters [J]. Journal of Tongji University (Natural science), 2017, 45(1): 79?86.
[9] 麻士東,楊國慶.直升機姿態與航跡非線性動態逆飛行控制模型[J].華中科技大學學報(自然科學版),2016,44(12):92?97.
MA Shidong, YANG Guoqing. Mathematical modeling of helicopter attitude and trajectory flight control based on nonlinear dynamic inversion [J]. Journal of Huazhong University of Science and Technology (Nature science edition), 2016, 44(12): 92?97.
[10] 李果,趙建中.小型無人直升機的廣義Hamilton非線性魯棒控制[J].北京信息科技大學學報(自然科學版),2016,31(4):1?7.
LI Guo, ZHAO Jianzhong. Generalized Hamilton nonlinear robust control for miniature unmanned helicopters [J]. Journal of Beijing Information Science & Technology University, 2016, 31(4): 1?7.
