平板駁船滾動裝卸重大件貨物方案設計
2018-06-13 10:03:30,,
船海工程 2018年3期
關鍵詞:船舶
,,
(大連海事大學 航海學院,遼寧 大連 116026)
利用駁船進行滾裝裝卸重大件貨物時,駁船的系泊、穩性、強度以及壓載水調整等問題均是整個裝卸過程的關鍵,國內已有學者為此開發了單船適用的計算機輔助控制系統[1-2],但尚未就這些系統對不同貨種和船型的適用性開展研究。因此,如何根據貨物、車輛、駁船、碼頭,以及潮汐等各方面的實際情況,合理地制定裝卸計劃,使操作原理和方法簡潔易懂,且保證各項指標滿足規范的要求則顯得尤為重要。本文給出了較為簡潔易懂的駁船滾裝原理和方法,并通過實際案例驗證方法的有效性。
1 基本原理
1.1 潮汐計算
根據潮汐理論,潮高計算方法如下[3]。
(1)
(2)
式中:h為任意時刻潮高;hL為低潮潮高;hH為高潮潮高;θ= (t·180°)/T,為漲潮某時刻距離低潮的相位角;θ′= (t′·180°)/T′,為落潮某時刻距離高潮的相位角;T和T′分別是漲潮和落潮周期;t和t′分別為漲潮和落潮的時間段(通常以分鐘數表示)。
1.2 吃水計算
在滾動裝卸貨時,駁船艉部應始終與碼頭平面保持平齊,才能保證平板車順利上下船。因此,根據碼頭高度和實際水深確定干舷大小,進而確定船舶吃水。我國陸基高程采用“1985國家高程基準”,與海圖深度基準有一定的面差,計算時應給予考慮。潮高和船舶吃水的關系見圖1計算如下。
d=D-(H+A-h)
(3)
式中:d為船舶吃水;D為船舶型深;H為碼頭高度;A為海圖基準面和1 985高程基準面的面差。
目前,駁船滾動裝卸貨物采用的平板車通常為重型液壓平板車(self-propelled modular trailers,SPMT)。為滿足工程需求,重型平板車均配有自動調平控制系統,以應對陸路運輸時由于路面坡度、轉彎、剎車、風載、路面不平等原因對行車安全造成的隱患[4]。在進行駁船滾動裝卸時,由于潮汐和貨物裝卸原因,駁船甲板面會與碼頭平面產生高度差,盡管重型平板車配有自動調平控制系統,但為保證安全,應盡量將駁船與碼頭的高度差縮至最小[5]。在滾裝實踐中,通常將兩個面的高度差控制在5 cm以內[6]。
1.3 淺水限制
在某些小型港口,碼頭水深不足,對駁船大小和載貨重量都會產生限制,在進行裝貨作業時,需留有足夠的富余水深,以保證完貨后能順利開航。
Dw+h-dm>UKC
(4)
式中:Dw為海圖水深;dm為平均吃水;UKC為富余水深。
2 裝卸方式計算
2.1 前后調整壓載水控制貨物裝卸
駁船系固后,船舶甲板的高度會隨著潮水的漲落而發生周期性變化。貨物滾裝上船后,駁船艉部吃水會明顯增加,導致艉部會低于碼頭平面,需將壓載水從艉部調整到艏部才能保持駁船艉部始終與碼頭平齊。如在這期間潮水上漲,則可以減少壓載水的調整量,有利于裝貨。所以,若想在裝卸貨期間利用潮水,則可選擇在漲潮時進行裝貨、落潮時進行卸貨。
以壓載水前后調整來控制船舶艉部吃水是目前大多數駁船操作中采用的裝卸方式,對于碼頭水深充足、碼頭高程適中的港口均適用。
2.1.1 滾裝計算
當貨物滾裝上船后,裝貨和潮水均會引起船舶吃水變化。第二軸貨物上船時,第一軸貨物整體向前平移,第二軸貨物填補第一軸的位置。由于貨物組每軸重量和軸距是均勻分布的,這相當向距船尾第二個軸距的位置裝載了一軸貨物,而已上船的貨物位置沒變;第三軸貨物上船,相對于向距船尾第三個軸距的位置裝載了一軸貨物,依此類推。根據船舶相關原理[7],則有
(5)
(6)
式中:dAi為第i軸貨物滾裝上船后的艉吃水;di為裝貨前艉部吃水初始值,由式(3)求得;pi為第i軸貨物重量,通常為均值,裝貨為正;xpi為pi與船中距離;L為船長;xfi為第i軸貨物上船時船舶漂心坐標;TPCi為第i軸貨物上船時每厘米吃水噸數;MTCi為第i軸貨物上船時每厘米縱傾力矩;a為平板車軸距。
在裝載第i軸貨物期間,潮水會發生變化,為順利裝載第i+1軸貨物,保證船舶艉部始終與碼頭保持平齊,由式(3)可知,需將艉部吃水調整為第i+1軸貨物上船初始時刻所對應的吃水,則
(7)
(8)
(9)
(10)
滾動裝貨時,可將駁船按照預定的方案加好壓載水,提前將艉部吃水調整到預定值,待潮水上漲至尾部與碼頭平齊后,便可以開始裝貨。
通常,成套的工程設備需要多個重型平板車分批次滾裝上船,第一批貨物整體上船后,需要縱向調整位置,以給后續貨物留足上船空間。縱向調整貨物,按下式計算艏艉吃水:
(11)
(12)
(13)
式中:δt為貨物整體移動引起的吃水差變化量;XP1和XP0分別為貨物移動前后距船中距離;PC為貨物整體重量;df0和df1分別為貨物移動前后的艏吃水;da0和da1分別為貨物移動前后的艉吃水。
2.1.2 滾卸計算
滾卸計算與滾裝計算原理相似,但略有不同。首先,艉吃水要求不同。需將漲潮時所要求達到的艉吃水值換成落潮時所要求的艉吃水值。其次,卸貨與裝貨的位置不同。通常,進行滾裝卸貨之前需將貨物整體移動至船艉,以第一軸貨物與船艉平齊為初始狀態。第一軸下船會帶動后續所有貨物整體向船艉移動一個軸距,最后一軸空間空出,這相當于從距船艉最后一個軸距的位置卸載了一軸貨物,而其余貨物位置沒變;第二軸貨物下船,相當于從距船艉倒數第二個軸距的位置卸載了一軸貨物,依此類推。則式(5)中pi應為卸載貨物總重,取負值;卸貨位置為
(14)
除了上述區別之外,其他計算與式(7)~(10)相同。相應準備工作也相似,將駁船壓載水布置好后,艉部可略高于碼頭,待潮水降到艉部與碼頭平齊后,便開始卸貨。
2.2 打排壓載水控制貨物裝卸
當碼頭水深不足,或碼頭高程較大,或兩者兼有之時,以打排壓載水控制裝卸貨,可以保證船舶整體吃水相對穩定。這則要求,貨物裝卸需在潮水水位較高、變化率較小時進行的,所以在工程實踐中,往往利用相對平穩的高潮時段進行貨物裝卸。
2.2.1 滾裝計算
進行滾動裝貨時,在進行壓載水調整之前的步驟與式(5)~(8)相同,壓載水調整由下式進行計算。
(15)
以這種方式進行滾動裝貨時,雖然各項準備工作與之前相同,但應該對潮水的高潮時段有較好的把握,若載水可調整的空間較小,且高潮時段過去后仍未完成貨物裝卸,可能會引起較大的危險。另外,這種裝貨方式相當于在船舶重心減少重量、重心之上增加重量,與其他方式相比,這種裝貨方式對船舶穩性影響較大,如果貨物組整體重心較高,應該對穩性問題給予充分考慮,保證安全。
2.2.2 滾卸計算
由于滾裝和滾卸均是在高潮時段進行的,所以相關計算原理與準備工作與上述相同。
2.3 僅依靠潮水進行貨物裝卸
僅依靠潮水進行滾動裝卸貨物具有裝卸貨時間較長、對潮汐精度要求較高、可控因素較少、駁船噸位相對較大等特點,在工程實踐中應用較少,可用作上述裝卸方式的備用方案或應急方案。計算原理較為簡單,由式(5)和(6)(或(5)和(14))計算出每一軸貨物上船(或下船)所對應的艉吃水,再根據式(3),由計算出的艉吃水值求出該軸貨物上船(或下船)的時間,直至全部貨物上船(或下船)。
國內一些港口就采用此方法進行滾動裝卸,“潮水漲一點,車輛滾一點”,有些甚至尚未提前制定完備的裝卸貨方案,這是有一定風險的,因為采用此種方法裝卸貨,至少還需滿足如下條件。
1)潮差足夠大。足夠大的潮差才能將貨物裝載產生的艉部吃水變化量抵消,因此,對于某些中小型港口采用滾裝方式裝卸重大件貨物時,存在等候大潮的情況。
(16)
式中:PC為整個滾裝貨物組總重;XC為整個滾裝貨物組上船后距離船中的坐標;xf為整個滾裝貨物組上船前后船舶漂心坐標的平均值;TPC為整個滾裝貨物組上船前后每厘米吃水噸數的平均值;MTC為整個滾裝貨物組上船前后每厘米縱傾力矩的平均值。
2)潮汐周期足夠長。潮汐周期足夠長,裝卸貨時間充足,漲潮和落潮的速度也相對平緩,整個滾裝貨物組才能一軸一軸地緩慢滾動上船,操作人員也有較充分的時間做好各項準備工作。
3)單軸重量不會使得駁船上下浮動超限值。由于有要求在裝卸貨期間,碼頭與駁船艉部上下浮動不超過5 cm,這對滾裝貨物組單軸貨物重量產生了限值,最多從高于碼頭5 cm裝至低于碼頭5 cm。因此,要求在選擇駁船時,需選擇滿載TPC值較大的船舶。
dAi-dAi-1<0.10
(17)
4)吃水差不超過限額。限于某些港口規范要求,貨物裝卸貨期間,船舶吃水差不應超過限值,從而對貨物重量有了限定。為了裝運較重的貨物,則需租賃更大的駁船。再者,在進行滾動裝貨時,船舶吃水差增加較大,滾裝貨物和船舶整體在縱傾條件下離岸力會增加,應注意縱傾對船舶系泊力的影響[8]。
(18)
式中:|tlimit|為港口對裝卸貨期間吃水差的限值。
3 運輸案例
3.1 基本參數
天津港某日潮汐數據、碼頭和貨物數據、駁船相關參數分別見表1~3。駁船壓載艙布置見圖2。

表1 天津港某日潮汐數據
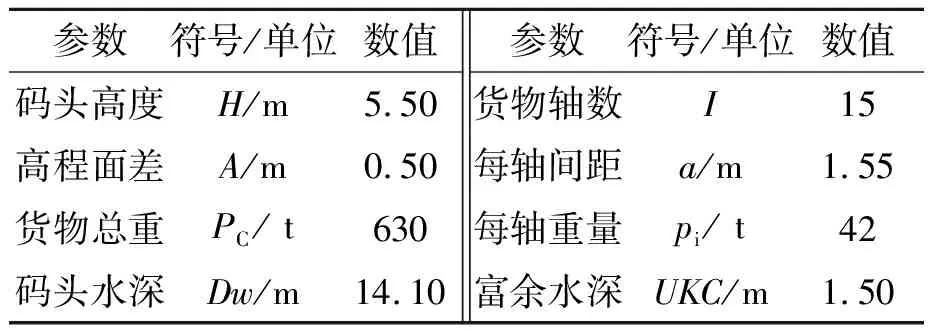
表2 碼頭及貨物數據
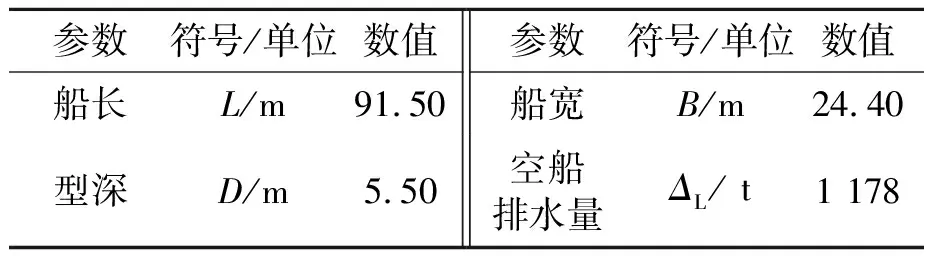
表3 駁船參數
3.2 初始載況
駁船進行良好系固后,貨物將從船舶艉部沿著中線滾裝上船。由于碼頭的富余水深充足,為保證裝貨效率和安全性,采用前后調整壓載水的方式來控制貨物裝卸。根據貨物、碼頭和駁船的實際情況,將駁船的第1、第4和第7左右邊壓載艙加壓載水,其余各壓載艙空置備用。壓載水布置和初始載況各項參數分別見表4和表5。
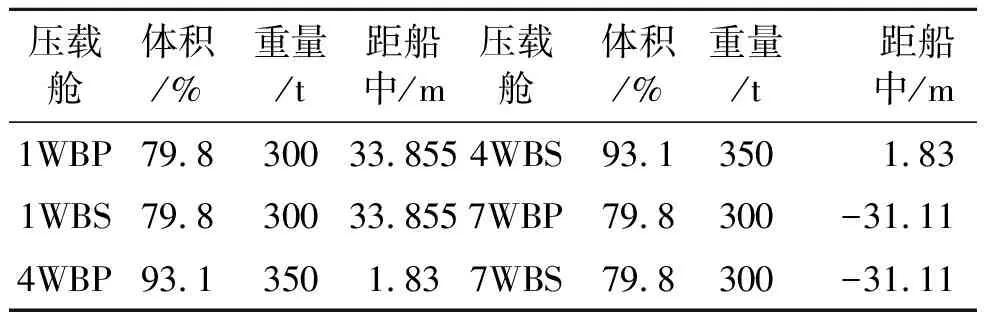
表4 初始壓載水布置情況
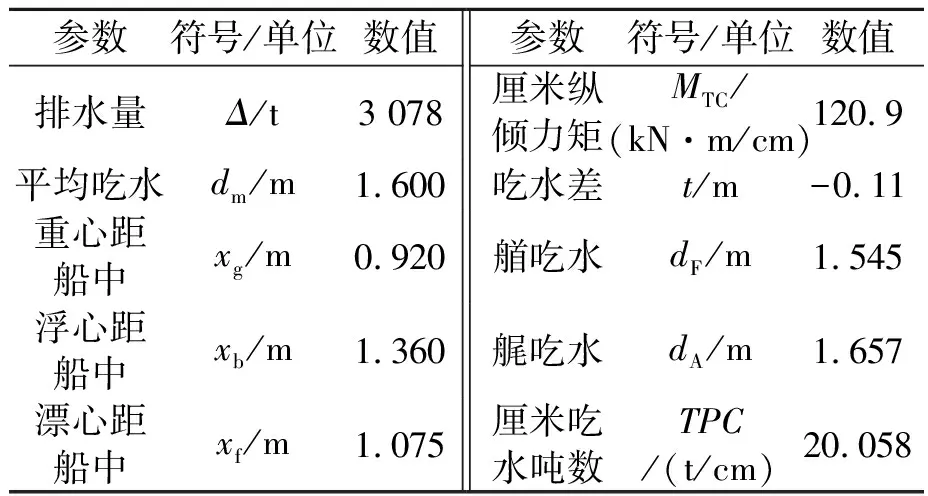
表5 初始載況各項參數
3.3 裝貨方案
計算得到,7:26-8:28期間潮高和要求的尾吃水值見表6。該港在裝貨當天早07:26分時,潮高是2.158 m,要求的艉吃水是1.658 m,與船舶初始載況對應的艉部吃水僅差1 mm,可選定為第一軸開始上船的時刻。為了避免滾裝貨物組上船時速度過大帶來的問題,選擇以4 min的時間間隔作為每軸上船的時間,即每4 min向前移動1.55 m。
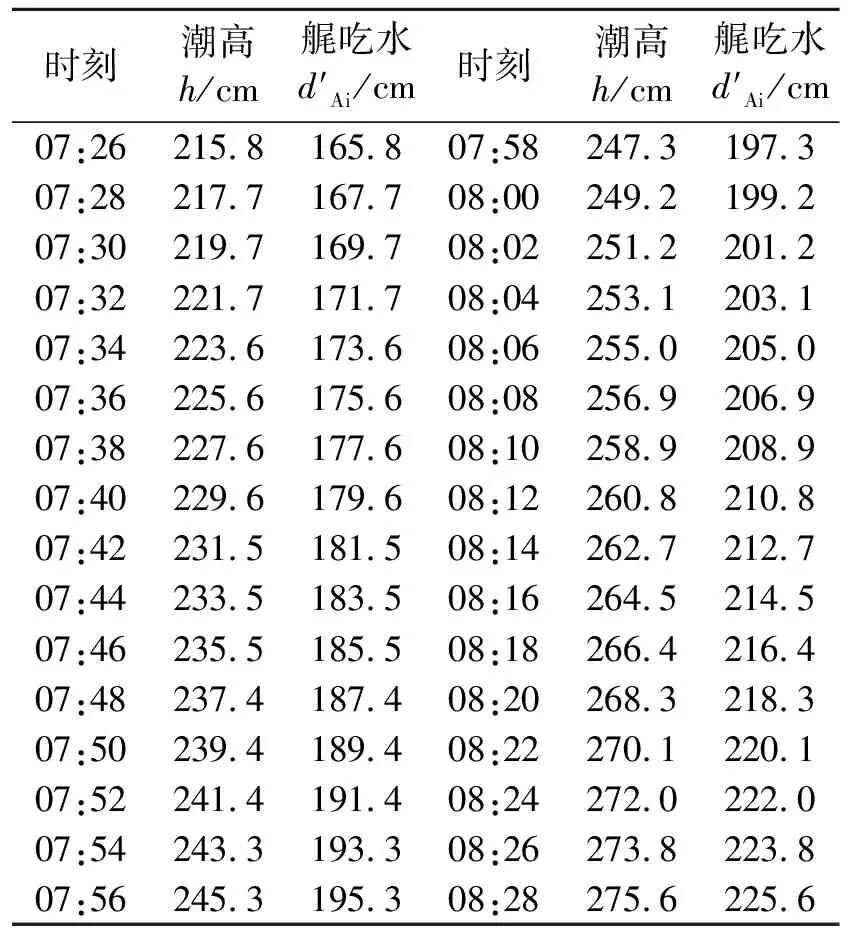
表6 裝貨期間潮高數據
為計算每軸貨物上船時壓載水的調整量,每次將壓載水從第7邊壓載艙調整至第1邊壓載艙或第1中部壓載艙,則式(9)中lwi=64.965 m。由于船舶橫傾對安全操作影響較大,滾裝貨物組從船舶尾部沿著甲板中線平行滾裝上船的同時,每次調整壓載水時,選擇左右舷均衡操作,即將第7壓載艙和第1壓載艙左右舷的排水管系同時開通,嚴格避免出現橫傾。根據上述內容,裝貨方案如表7所示。另外,根據計算結果,在整個裝貨過程中的船舶穩性、總縱強度和局部強度均滿足要求。利用上述方法,駁船裝載完該組貨物后,第二天又順利完成了第二批貨物的滾裝作業。
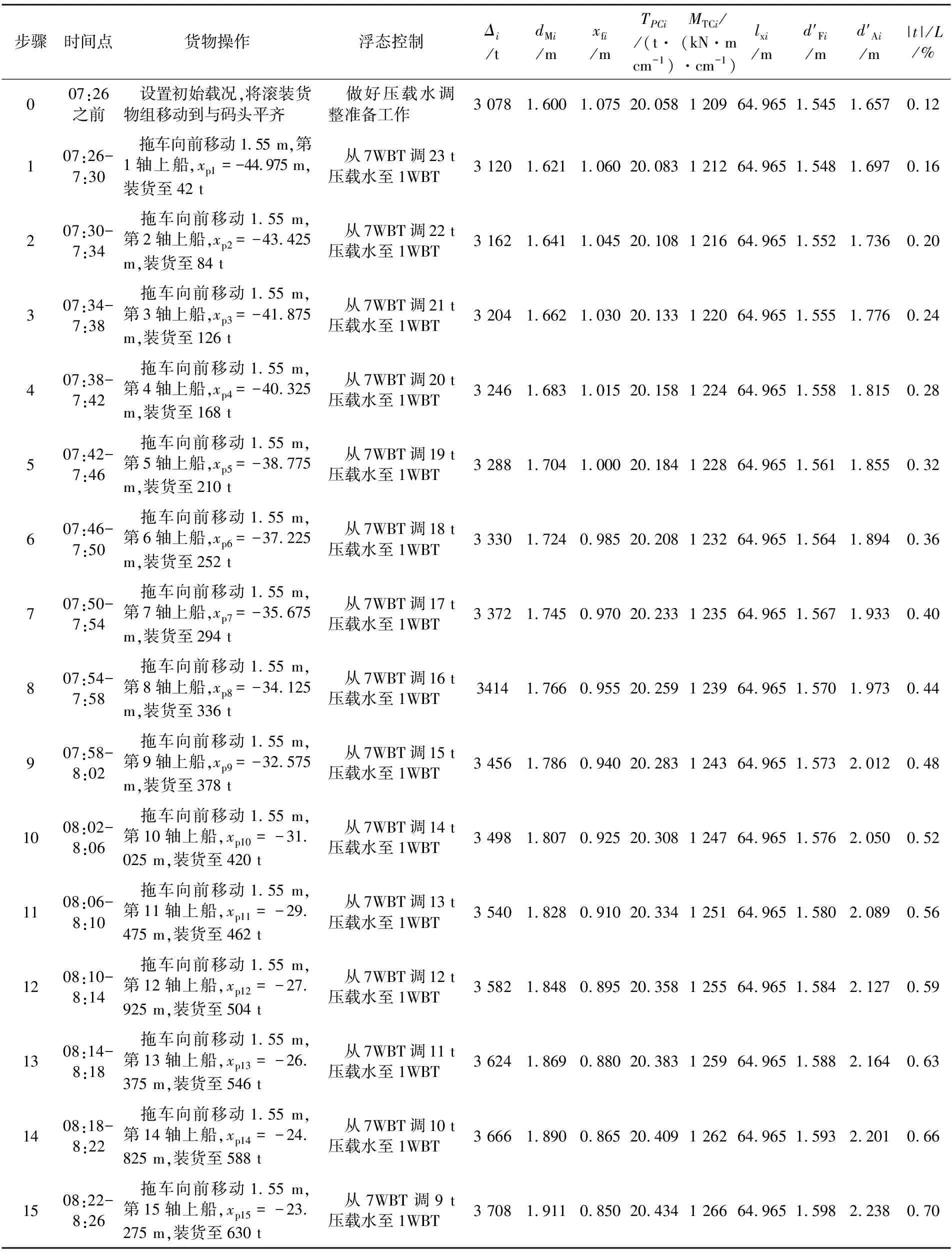
表7 滾動裝貨方案

4 相關建議
1)如實際條件允許,盡量用壓載水控制船舶的浮態,這樣較容易控制且裝卸貨效率高。
2)對于某些潮差比較大的港口,謹慎選擇裝卸貨時間段,盡量選擇在白天進行作業,且保證裝卸貨的過程是可控的。
3)選擇合適的天氣和海況進行裝卸作業,風力一般不大于5級,輕浪或微浪[1]。
4)對于重量較大的滾裝貨物組,應保證碼頭和過橋梁的強度。注意裝卸過程中波浪對過橋梁坡度和平板車的影響。建議將絞纜機開啟,以便維持駁船與碼頭的相對位置[9]。
5)本文所提及的裝貨方法是縱向滾裝,即滾裝貨物組從駁船艉部沿著中線左右舷對稱滾裝上下船,壓載水調整也是左右舷對稱調整,是目前較為通用的做法。當限于港口條件等原因進行不對稱滾動裝卸,或者當進行橫向滾裝時,建議根據滾裝貨物組所允許的最大道路坡度來設定所允許的船舶縱傾和橫傾值,并依次計算壓載水的調整方案。因為,在進行重大件貨物陸路運輸規劃時,為保證車輛牽引力和制動力的有效性,需要對重型平板車的貨物組所允許的最大道路坡度進行詳細計算[10-11]。通常,重型液壓平板車所允許的最大道路坡度與驅動輪個數,貨物組質量和路面滾動摩擦系數(對于船舶而言通常為定值)有關,貨物組質量小、驅動輪個數越多,所允許的最大道路坡度越大[12]。如果裝船的貨物組的質量較大、驅動輪個數較少,則所允許的船舶傾斜值較小,制訂裝卸計劃時,需要額外注意,需多次調整壓載水。
[1] 葛圣彥.重大件貨物滾裝裝船技術研究[D].大連:大連海事大學,2008.
[2] 肖建英.甲板駁船滾裝大型貨物壓載水調節與擱淺計算[J].大連海事大學學報,2009(2):23-27.
[3] 郭禹,張吉平,戴冉.航海學[M].大連:大連海事大學出版社,2014.
[4] 楊宇靜.重型平板車自動調平控制系統的研究[D].秦皇島:燕山大學, 2015.
[5] DNV-GL. Marine operations and marine warranty(DNVGL-ST-N001)[S]. Oslo: DNV-GL. 2016-06-10.5.3.14
[6] 朱夢來.裝船機在整機滾裝過程中安全性穩定性分析[D].天津:天津大學,2012.
[7] 杜嘉立,姜華.船舶原理[M].大連:大連海事大學出版社,2011:77.
[8] 肖建英.甲板駁船自由浮態滾裝大型貨物研究[J].中國航海,2009(2):50-53.
[9] DNV-GL. Transport and installation of wind power plants[S]. Oslo: DNV-GL, 2017:22-23.
[10] 吳麗麗.重大件公路運輸若干問題的研究[D].哈爾濱:東北林業大學,2007.
[11] 張輝輝.公路橋梁大件運輸關鍵問題研究[D].武漢:武漢理工大學,2011.
[12] 樊巍巍,王曉云.基于動力性及制動性對SPMT液壓平板車重載運輸時道路極限坡度的研究[J].起重運輸機,2016(1):61-64.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30