基于測向數據多層預處理和多項式擬合的單站無源定位算法
2018-06-19 08:00:06尹俊平姬利海王妙妙
艦船電子對抗 2018年2期
趙 悅,尹俊平,姬利海,王妙妙,3
(1.東北師范大學,吉林 長春 130024;2.北京應用物理與計算數學研究所,北京 100088;3.北京工業大學,北京 100190)
0 引 言
當前,隨著電子技術的日新月異,電磁環境日益復雜,電磁信號密集交疊。雷達是信息化戰場和武器系統中目標信息獲取、指揮控制、精確制導和火力打擊作戰體系中最重要的裝備,也是取得信息優勢的最重要手段。雷達對抗作為電磁空間斗爭的主要作戰手段,正朝著精確化、智能化方向發展,以應對現代戰爭的作戰需求。精確化、智能化雷達對抗需要更加完整、準確、精細的偵察數據處理算法作為支撐。雷達對抗單站無源定位是偵察數據情報處理的重要內容之一,其具有僅用單套偵察設備、作用距離遠、隱蔽性好等諸多優點。因此,單站無源定位一直是雷達對抗情報處理領域研究的熱點問題。傳統的有源定位技術是根據有源輻射來對目標進行定位,但其弊端是自身位置信息易暴露,同時容易受到電子干擾與對抗[1]。而無源定位技術可解決這一問題,其本身不主動發射對目標照射的電磁波,只需一定傳感器和單個觀測平臺,設備簡單、定位距離遠且機動性良好,可快速實現對目標的定位[2]。
無源定位根據觀測站數量不同可分為單站和多站定位2類,依據觀測站狀態又可分為固定站和運動站。為了準確地定位,多站定位系統對站間的協調配合要求比較高,實際操作過程中實現高精度定位非常困難。而單站無源交叉定位技術是利用一個運動觀測平臺對目標進行定位的技術。其實現過程是:單個運動觀測站對輻射源進行連續測量,觀測站運動到不同位置對應于目標不同的到達角,根據交叉定位方法,多條定位射線交匯的目標點即為定位結果[3]。利用單站在不同時刻的測量數據直接進行交叉定位的算法簡單,但是定位結果不是最優[4]。傳統非線性濾波算法中擴展卡爾曼濾波及其衍生算法的缺點主要是非線性誤差導致濾波器性能不穩定,容易發散[5]。另一種常用的定位算法是最小二乘定位算法,該算法首先交叉定位得到目標的初始位置,其次對初始位置采用牛頓迭代法得到更精確的目標位置,很大程度上提高了定位精度[6-7]和定位效率。文獻[8]~[9]給出了對定位精度進行分析的原理。文獻[10]中僅對原數據進行分片處理及局部擬合,簡單的數學平均和僅采用線性擬合并沒有消除異常點對定位結果的影響。從數理統計角度,顯然對數據的預處理,在一定程度上可避免某些異常點對定位結果的影響,提高定位準確度。鑒于此,本文采取先對測向數據進行多層預處理,再利用最小二乘定位算法進行定位的算法,該算法包含了去除明顯異常、近鄰相差小、超過容差的數據等多層預處理過程以及多項式擬合提取數據算法,從定位精度可以看出該算法可明顯消除異常點對定位精度的影響。
本文內容主要分為兩大部分:第一部分為測向數據多層預處理和多項式擬合算法、最小二乘定位算法以及幾何精度分析原理;第二部分是數值實驗,對模擬數據進行預處理、擬合、定位的計算結果以及定位算法的幾何精度分析。
由表3能夠直觀地看出單個指標的得分情況,而結合表4兩個因子的累計方差貢獻率,進一步對每個指標進行加權匯總,能夠推出每個因子的總得分公式:
1 基于測向數據預處理的最小二乘定位算法
1.1 初步判定
為了得到更精確的目標定位結果,首先基于脈沖數據特征進行一些初步判定。由于脈沖個數太少或方位角偏移角度較小,可能會導致定位偏差較大,所以進行如下判定:
(1) 考慮到數據容差、設備測量精度等原因,需借助最小二乘進行定位結果的優化,進而實現定位精度的提升。若脈沖個數較少,最小二乘定位方法的優勢無法體現。所以我們考慮脈沖個數需大于某個設定值(例如10)時,才有較準確的定位結果輸出。
《了不起的蓋茨比》是被譽為爵士樂時代的“編年史家”和“桂冠詩人”的美國作家司各特·菲茨杰拉德的杰作,反映了美國社會轉型期普遍存在的精神生態危機問題。深刻理解菲茨杰拉德對社會轉型期出現的意識形態領域問題的思考及他對消費主義文化價值觀所持的批判態度,對解決我國當今社會轉型期存在的諸多精神生態危機問題具有一定的指導意義。
式中:σx、σy分別為x、y方向上的定位標準差。
1.2 預處理
1.2.1 刪除考慮范圍外的數據
供分析測試的少穗竹和四季竹竹筍均取自華安竹種園,各竹種分別采集大小適中,無病蟲害和機械損傷,無明顯空洞,無畸形,不干縮,生長健壯、鮮活的竹筍。剝除筍籜洗凈后,縱切竹筍,采用四分法取樣,分別取樣測定含水量;其余置于60~70 ℃烘箱中烘干,粉碎并過0.5 mm篩后,保存于干燥器中,供其他成分測定使用。
經過初步判定后,先對超出考慮范圍的數據進行刪除,排除這些數據對定位結果的影響。例如考慮區間[0°,360°],對超出此區間的方位角進行刪除。圖1和圖2為處理前后的對比圖(這里采用下文仿真一中的數據進行預處理)。
(1)NFC手機支付今后將主要采用卡模擬技術,具體形式為使用“手機PAY-升級版ODA”方案或者“手機APP-HCE技術-token授信”方案,綁定銀行卡并加載城軌行業應用信息,進出站脫機支付。NFC手機支付可完善銀行卡在城軌的受理環境,避免銀行卡換卡、電子現金在特定設備上圈存余額等問題。
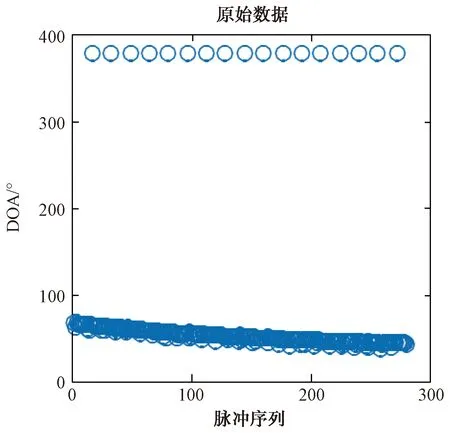
圖1 刪除前的脈沖序列
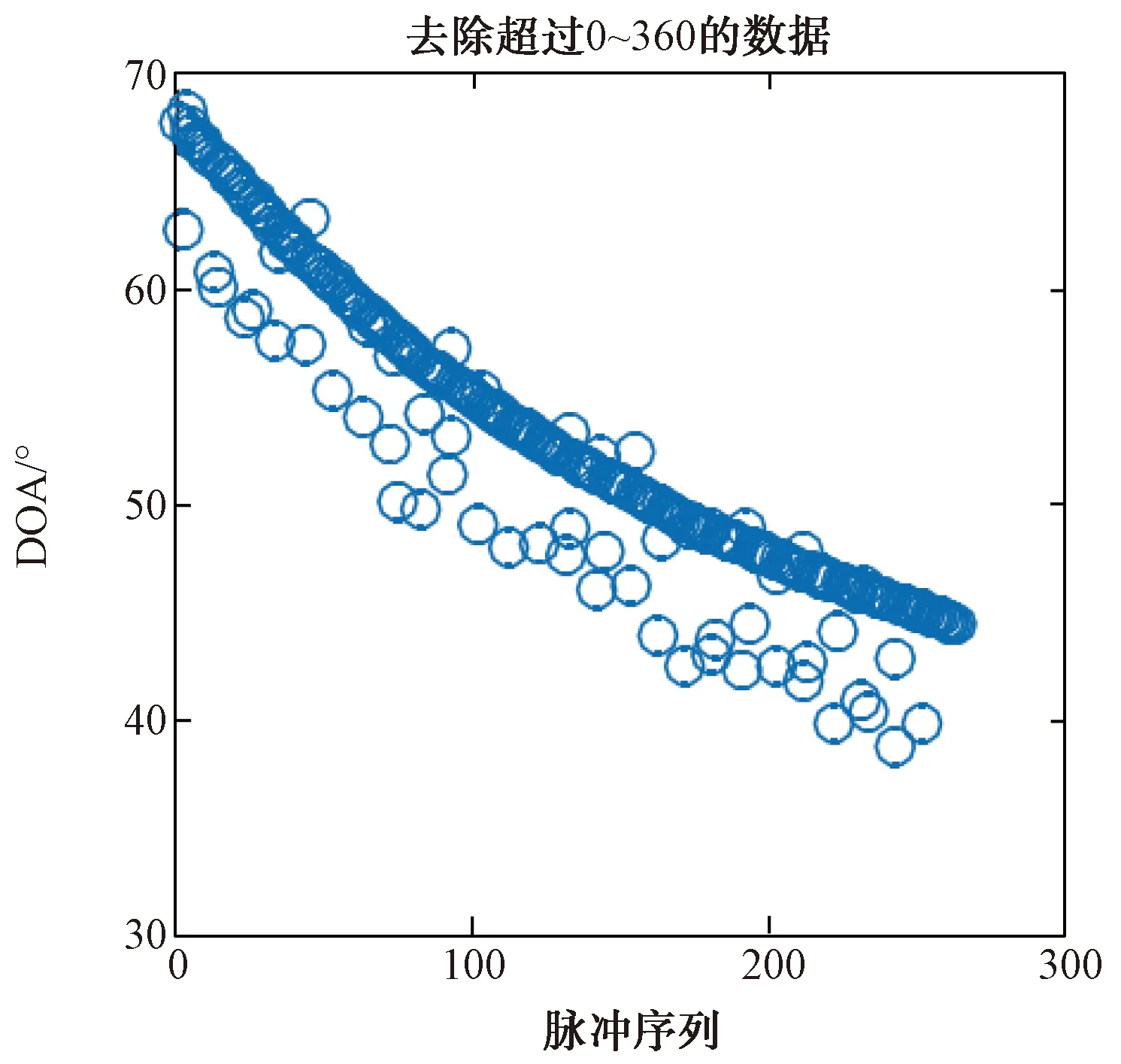
圖2 刪除后的脈沖序列
1.2.2 去除重復數據
剔除區間外數據后,再對短時間內相同或近鄰相差較小的方位角數據進行去重復,盡可能地避免重復計算帶來的誤差。圖3和圖4為處理前后的對比圖。
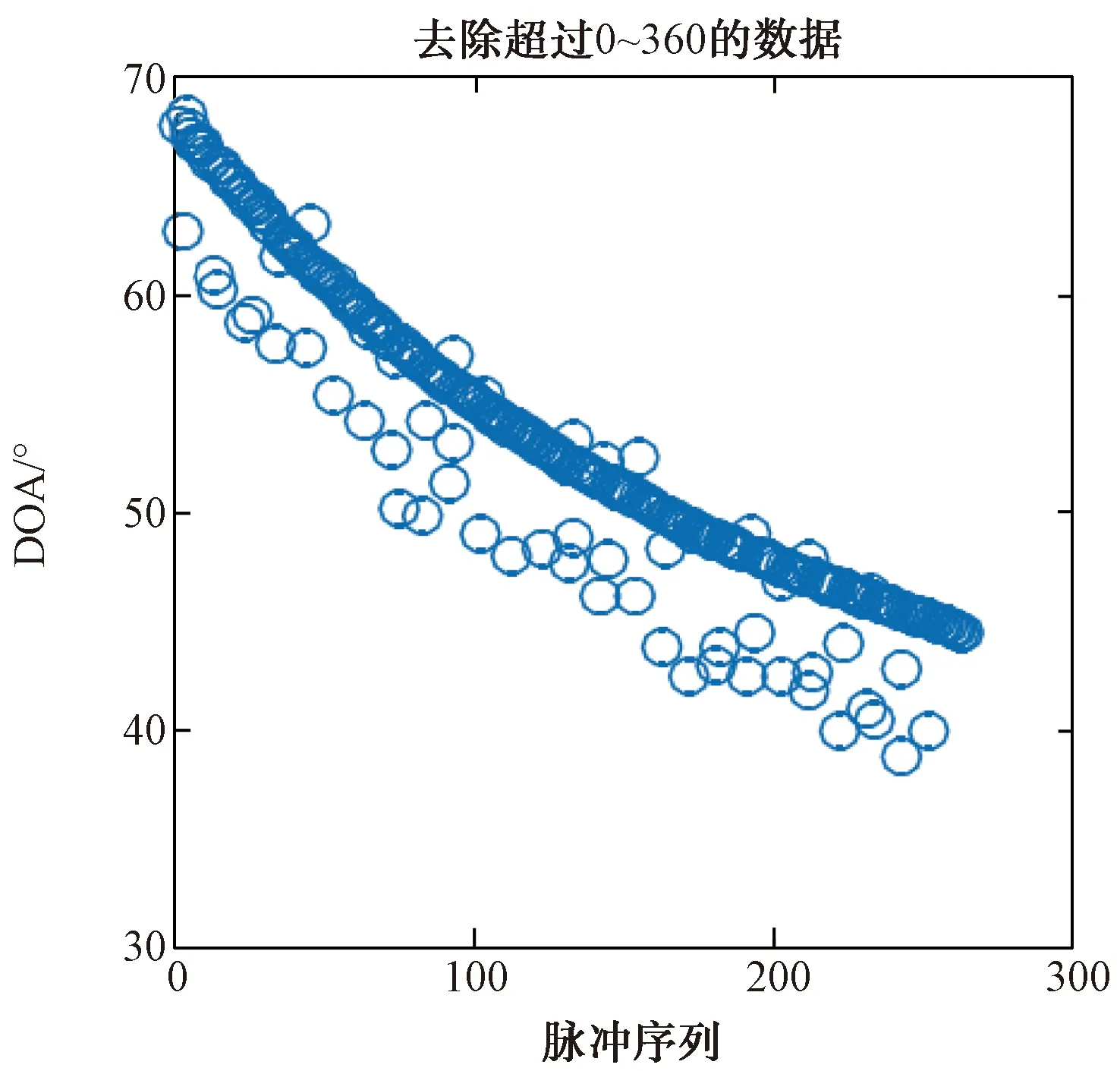
圖3 去除重復數據前的脈沖序列
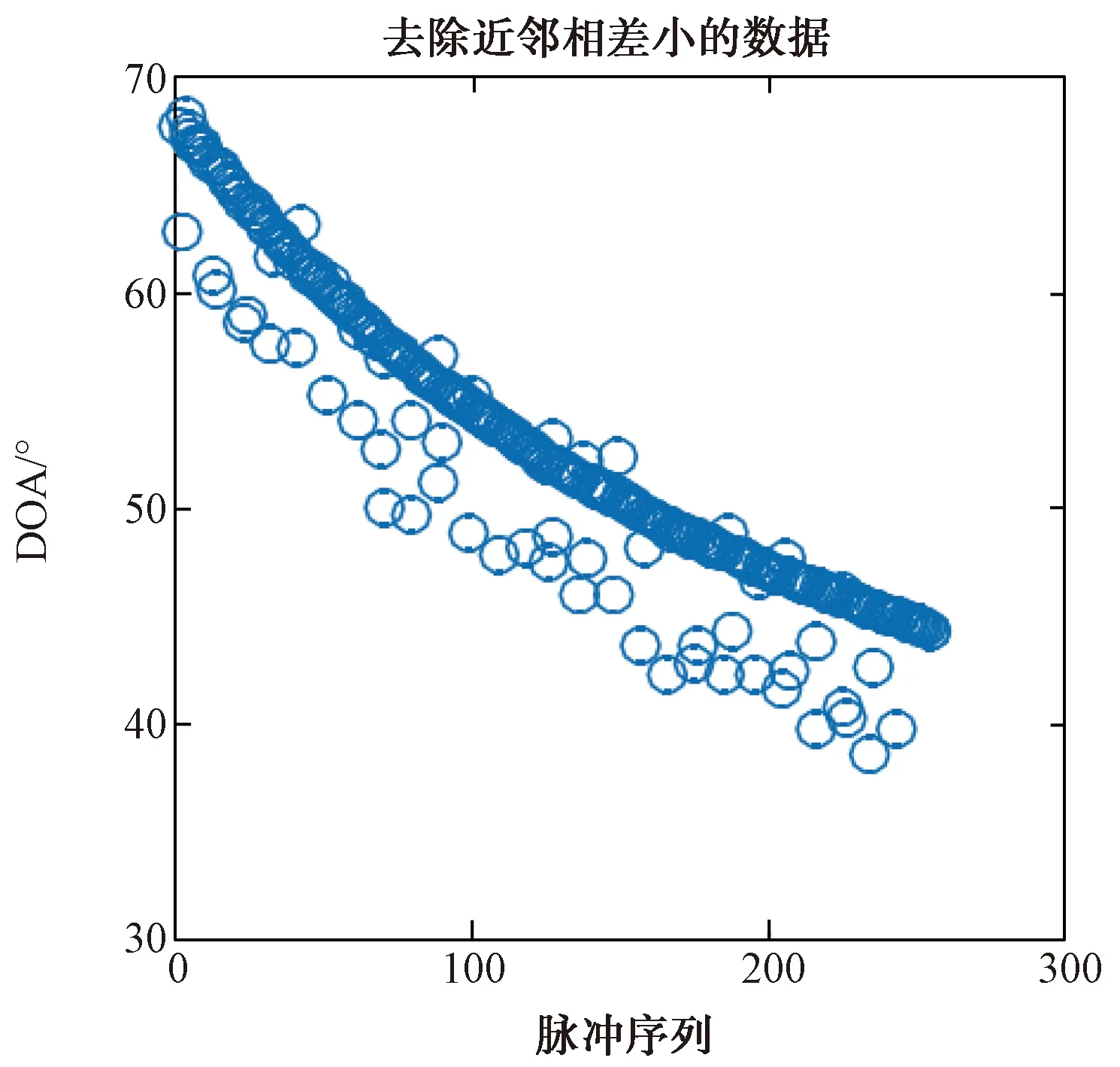
圖4 去除重復數據后的脈沖序列
1.2.3 去除容差外的數據
沒多久,市里要建一個新電廠,公開招工人。李紅慫恿齊海峰和她一起考:“這可是個千載難逢的好機會,難道你要在菜站當一輩子臨時工?萬一哪天菜站解散了怎么辦?”
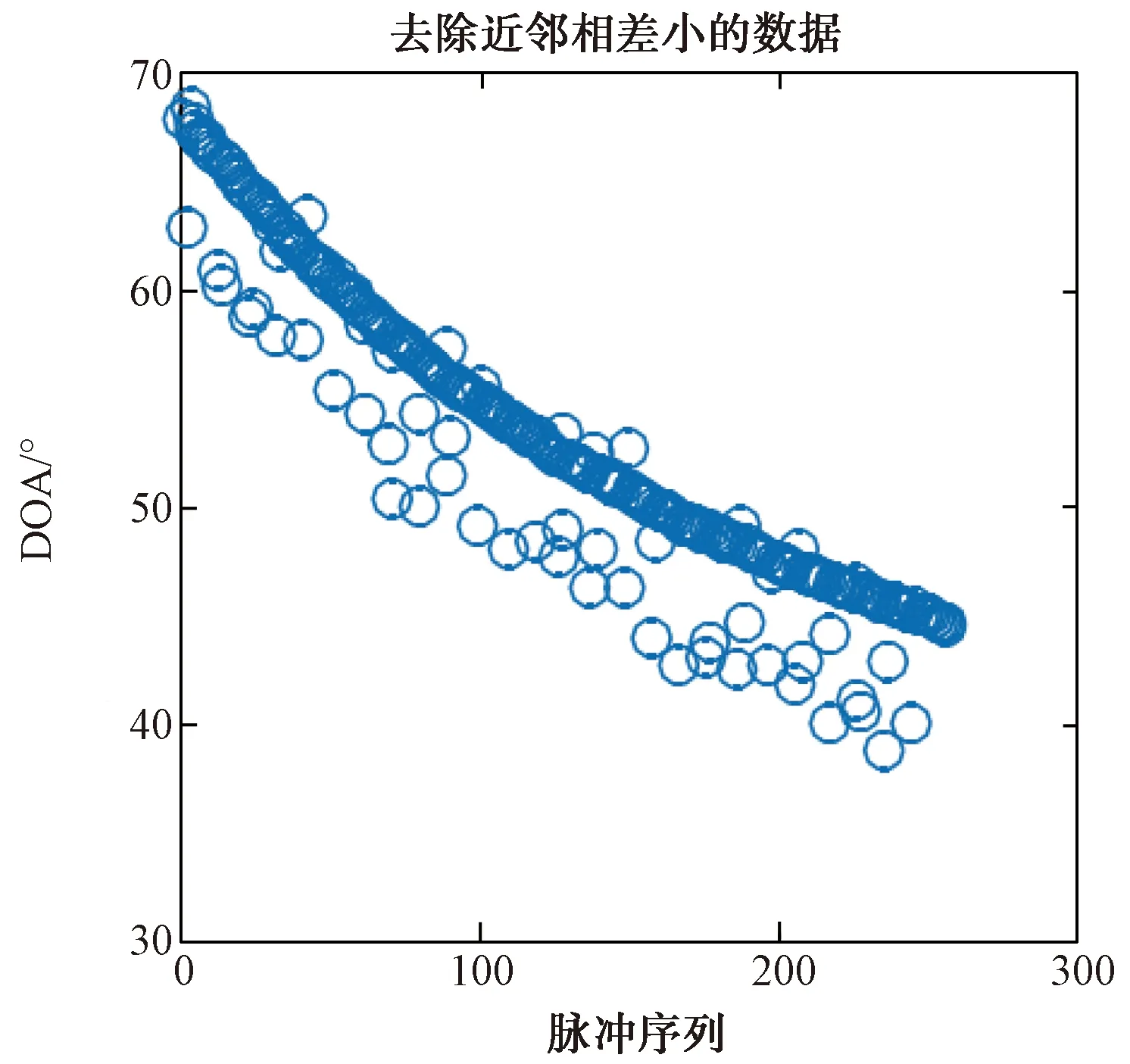
圖5 去除容差外數據前的脈沖序列
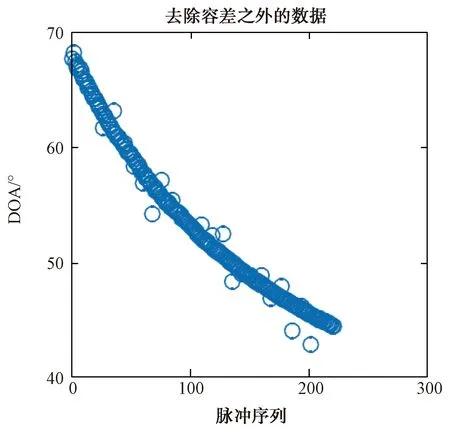
圖6 去除容差外數據后的脈沖序列
1.3 擬合提取
通過多項式擬合曲線從上述處理后的數據中挑出滿足一定規律的點。將擬合曲線與數據曲線相近的數據進行提取,再利用提取的數據進行定位。圖5和圖6為擬合曲線提取的前后對比圖。
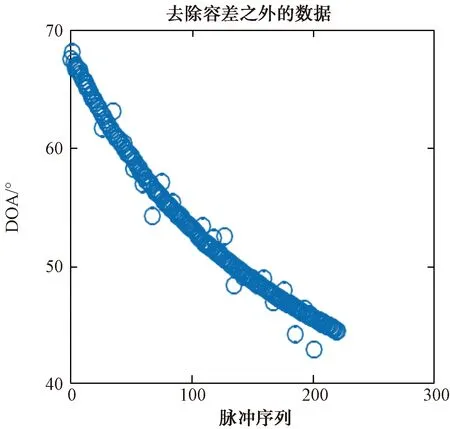
圖7 擬合曲線提取前的脈沖序列
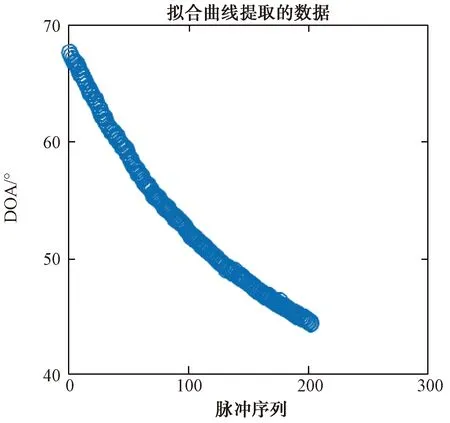
圖8 擬合曲線提取后的脈沖序列
1.4 最小二乘交叉定位
現用不同時刻飛機的N個位置對目標A(xm,ym)測向,設飛機的N個位置為(xi,yi),根據三角關系有:
(1)

由以上等式可以推出GDOP為:
(2)

從而有:
(3)
H=FL+C
(4)
L的最小二乘估計為:
(5)
迭代方程為:
(6)

我在谷歌上填了她女兒的名字和學校,試著按下回車,沒想到真的找到一個有關她女兒的帖子。那是一個山區老師發的,說他們學校條件很差,但仍有許多三好學生。帖子的最后,附了一張照片,幾個孩子圍著一個年輕的老師。萬姐忽然指著蹲在前排的一個女孩兒說:“那是小潔,我女兒,都是三好學生了!”
把測向交叉定位結果取平均作為迭代初值,當誤差達到設定的閾值時,迭代停止,輸出定位結果。
1.5 幾何精度因子(GDOP)分析
兩站交叉定位是常用的定位方法,這里對單站兩點交叉定位進行GDOP分析。
定位精度GDOP的定義式為:
(7)
(2) 在利用交叉定位時,若方位角偏移δθ=θ1-θ2非常小,則會導致tanθ1-tanθ2趨于0,進而引起定位誤差偏大,無法定位。因此,當方位角偏移角度大于某個閾值時,方可進行定位。
對θi求微分得到:
(8)
式中:(xi,yi)分別為觀測站的坐標;(x,y)為目標的位置坐標。
②構件1(第一層)對6個地震記錄的損壞程度,即剛度折減75%和50%,相當于活性水平0.25和0.50(12 個情況);
令:
(9)
歐陽修說:“立身以立學為先,立學以讀書為本。”書是良藥,劉向說:“書猶藥也,善讀可以醫愚。”書是益友,臧克家說:“讀過一本書,像交了一位益友。”書是窗戶,高爾基說:“每一本書,都在我面前打開了一扇窗戶。”書是一艘船,它載著人們在知識的海洋中航行;書是一架梯子,它能引導我們登上知識的殿堂;書是一把鑰匙,它能幫助我們開啟心靈的智慧之窗。
中國是“竹文化”的發源地,竹編工藝是一門傳統的中國手工藝術,歷史悠久,被列入世界非物質文化遺產名錄,不僅有極高的藝術價值,也是傳統文化的傳承。本文利用現有的研究成果,以區域作為劃分依據和研究單位,對中國不同區域的竹編工藝進行分析研究,總結出中國不同區域竹編工藝文化的特點。結合當今的傳統文化繼承現狀,思考如何將傳統的竹編工藝文化與時俱進地融入現代生活中,面對現代潮流的沖擊,如何更好地傳承與發展。
MdX=Rdθ+P1dt1+P2dt2
(10)
當M可逆時,令N=M-1。設定測量誤差為零均值,且站址誤差之間是不相關的,可得到目標位置估計誤差的協方差為:
E(dXdXT)=N(RE(dθdθT)+P1E(dt1dt1T)P1T+
P2E(dt2dt2T)P2T)NT
(11)
其中:
物性封閉圈閉又稱成巖圈閉,指各種次生成巖作用使原始沉積的巖層孔隙性發生變化形成的圈閉[7-8]。其包括兩種情況:一是由于膠結作用導致滲透層上傾部位孔隙度及滲透率降低,因滲透層上傾方向物性變差形成遮擋條件;二是由于次生變化,如白云巖化,使原來不具有滲透性的巖層一部分孔隙度、滲透率增大,形成低滲透層中的高孔、高滲段。
(12)
(13)
目標的位置誤差協方差陣又可以表達為:
故上式可以轉化為:
(14)
二是市場自主力量相對薄弱。市場主體數量和民營經濟水平對市場力量影響至關重要。2017年大連全市私營企業總數約20.5萬戶,個體工商戶總量達到42.6萬戶 [5]。相比較,深圳私營企業總數超過180萬戶,個體工商戶也超過了130萬戶 [6],而且深圳高科技企業80%以上是民營企業 [7],因此深圳的市場力量才能強大,市場機制才能健全。大連還需要多增加民營企業數量,多培育高科技高成長性民營龍頭企業。此外,大連企業市場化自主決策能力不強。央企、國企的公司管理現代化水平不高,過度依賴領導者喜好來配置人事、生產和銷售資源。民營企業也缺乏真正獨立性,存在一定的政商依附關系。
(15)
由E(dXdXT)的表達式可以求出GDOP值,并進行分析。
短時間內,目標方位角具有一定的穩定性,對于分段區間內破壞這種穩定性的異常數據進行刪除。去除超出容差范圍的方位角數據,盡量減少容差外數據的影響,提高定位精度。圖5和圖6為處理前后的對比圖。
2 算法仿真
2.1 定位仿真
仿真1:設定目標經緯度為(121°E,38°N),飛機航跡的起始點為(121.4135°E,39.0142°N),飛機航跡的終點為(122.6102°E,39.5749°N)。起始點方向角θ1=67.82°,終點方向角θ2=44.42°。飛機從起始點向航跡終點飛行,在航跡上等間隔取160個測量點,通過仿真程序添加一些異常點數據,共計280 個數據點。表1是對各處理階段數據的定位結果。
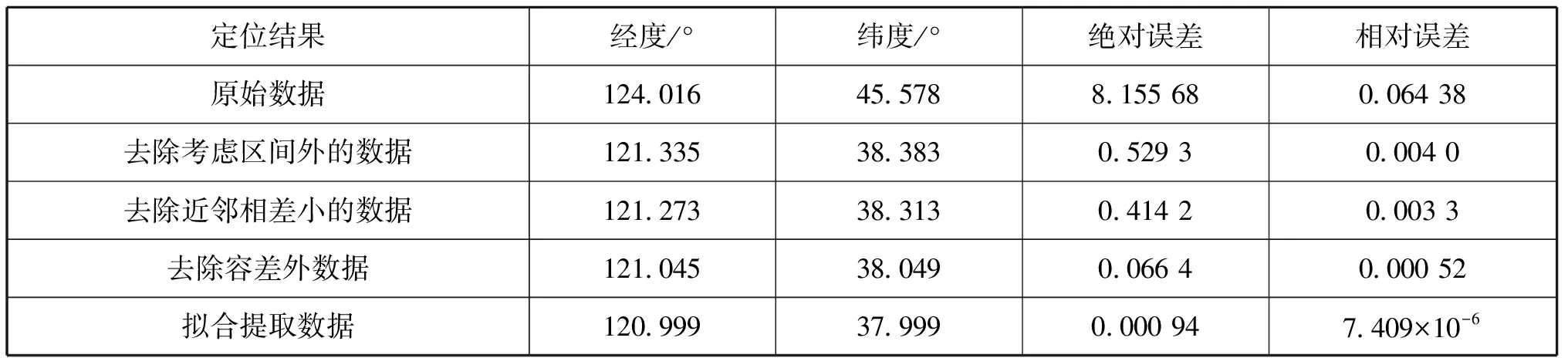
表1 仿真1中對各處理階段數據的定位結果
以去除考慮區間外的測向數據作為基準,將去除近鄰相差小、去除容差外、擬合提取的數據的定位精度分別與該基準的精度比較得到結論:定位的精度經此3個步驟分別提升了18.68%、86.97%、99.82%。
仿真2:設定目標經緯度為(113°E,35°N),飛機航跡的起始點為(116.353 1°E,40.043 1°N),飛機航跡的終點為(115.100 8°E,40.4135°N)。起始點方向角θ1=56.38°,終點方向角θ2=68.75°。飛機從起始點向航跡終點飛行,在航跡上等間隔取160個測量點,通過仿真程序添加一些異常點數據,共計279 個數據點。表2是對各處理階段數據的定位結果。
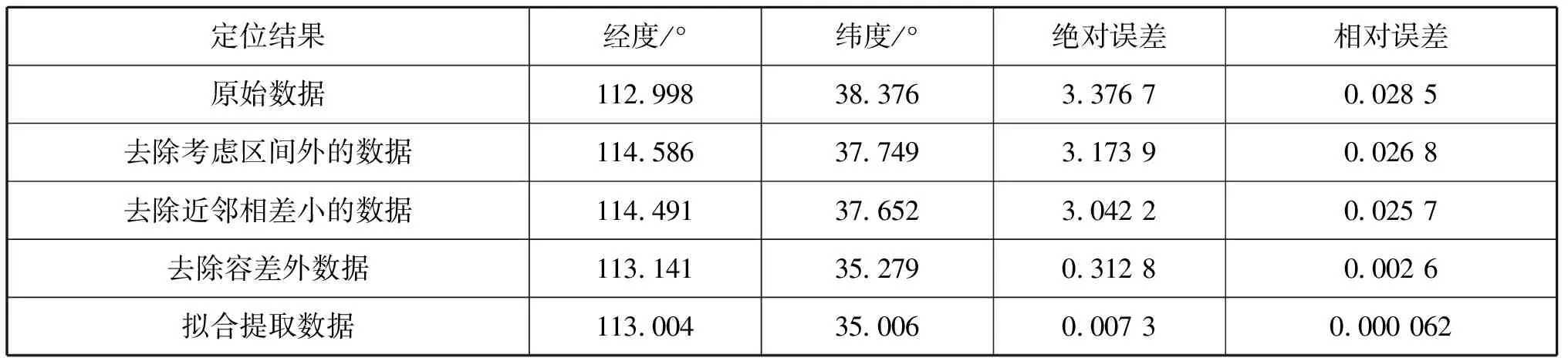
表2 仿真2中對各處理階段數據的定位結果
再次以去除考慮區間外的數據作為基準,將去除近鄰相差小、去除容差外、擬合提取的數據的定位精度分別與該基準的精度比較得到結論:定位的精度經此3個步驟分別提升了4.15%、90.14%、99.77%。
雞痘是由雞痘病毒感染產生的,雞痘病毒通常會存在于年末或者皮膚的病灶之中,對于自然環境具有相當強的抗性。無論是陽光照射、干燥還是低溫環境,都可以存活很久。雞痘病毒對于火堿水和醋酸水都很敏感,養殖常用的消毒藥也具備一定的效果。
由上2個仿真結果表明,原始包含異常點的數據,經過上述3個步驟的預處理,定位精度得到大幅度提升。
2.2 定位精度GDOP仿真
設定2個觀測點位置,觀測點1的位置坐標為(0 km,0 km),觀測點2的位置坐標為(60 km,0 km),目標與觀測點1構成的方向角為θ1=40°,目標與觀測站2構成的方向角為θ2=70°。考慮的仿真區域:X軸方向為±400 km,Y軸方向為±400 km。仿真不同站址誤差和測向誤差影響下的定位精度如圖9~圖11所示。
仿真1:測角誤差為3 mrad,站址誤差為1 m,GDOP分布圖如圖9所示。
黃酮類化合物母核中具有2-苯基色原酮結構,該類化合物種類繁多,在植物體內多與糖結合以苷的形式存在,是柳屬植物主要的活性成分之一。柳屬植物中共分離得到61個黃酮,其中有5種為從該屬植物中分離得到的新化合物,具體化合物名稱見表1[2-21]。
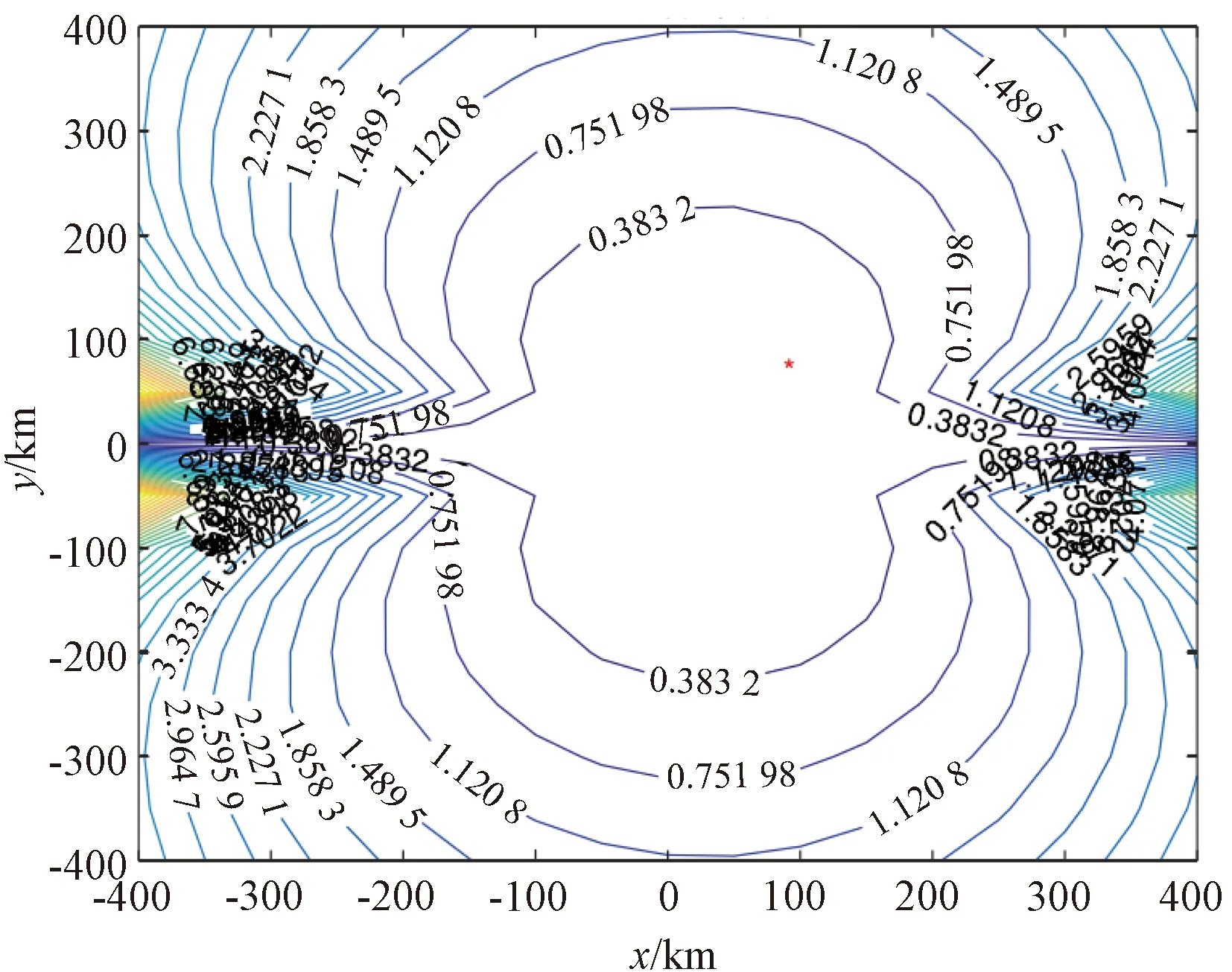
圖9 GDOP分布圖
仿真2:測角誤差為3 mrad,站址誤差為10 m,GDOP分布圖如圖10所示。
仿真3:測角誤差為7 mrad,站址誤差為10 m,GDOP分布圖如圖11所示。
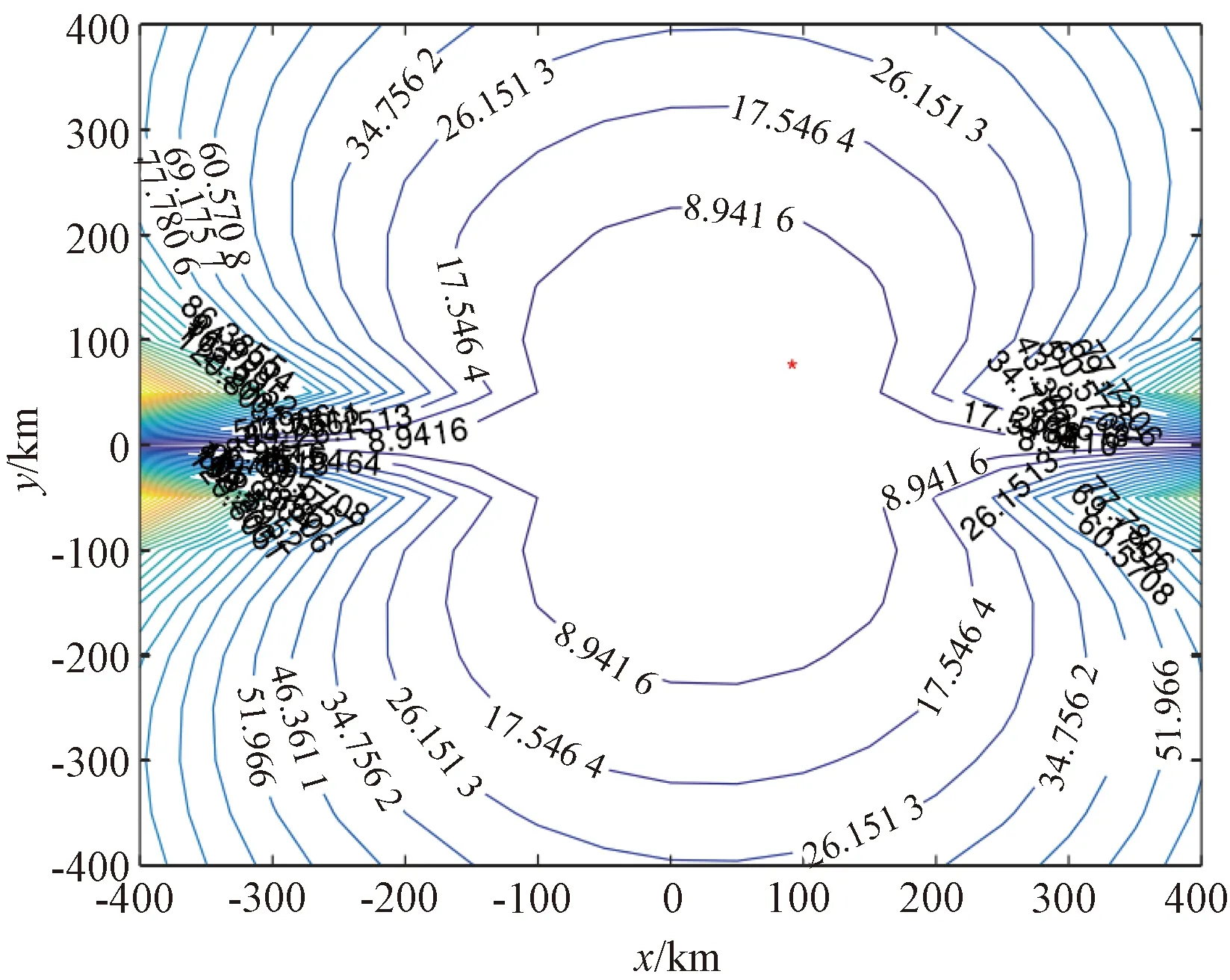
圖11 GDOP分布圖
由圖可以看出,定位精度受到站址誤差和測角誤差的影響,隨著它們的增大,定位誤差增大,定位精度下降。觀察仿真1和仿真2的GDOP圖得到:雖然定位精度隨站址誤差的增大有所下降,但站址誤差變化對定位精度影響相對較小。而由仿真2和仿真3的GDOP圖可知,測角誤差的變化對定位精度影響較大。測角誤差對定位誤差的影響起主要的作用。圖中標記點是目標真實位置的坐標,由仿真圖可以看出,在800 km×800 km的區域內,目標真實位置所在區域的定位誤差最小,并且目標在近距離內,定位誤差較小,精度較高;在遠距離時,定位誤差較大。
3 結束語
本文主要針對單站無源定位算法進行改進,首先對測向數據進行多層預處理和多項式擬合,得到較純凈的測向數據,再利用直接交叉定位算法得到目標位置的初始估計,進而基于最小二乘及牛頓迭代得到更精確的目標位置。通過2組定位仿真,驗證在采用多層預處理和多項式擬合后的數據進行定位時,定位精度分別提升了99.77%、99.82%。通過定位精度分析可知,測角誤差對定位誤差的影響顯著,而站址誤差對定位誤差影響較弱。這些結論對進一步提高單站無源定位的精度具有一定的借鑒意義。
[1] 孫仲康,郭福成,馮道旺.單站無源定位跟蹤技術[M].北京:國防工業出版社,2008.
[2] TEAK L S.Observability of target tracking with bearing only measurement[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):211-215.
[3] 汪珺.測向交叉定位技術[J].電子科技,2011,24(7):129-132.
[4] WILSON J.Precision location and identification:a revolution in threat warning and situational awareness[J].Journal of Electronic Defense,1999,22(11):43-48.
[5] 黃耀光,高博,李建新.基于平方根UKF雙向濾波的單站無源定位算法[J].數據采集與處理,2013,28(2):207-212.
[6] 何青益,趙地.基于最小二乘方法的單機測向定位算法[J].艦船電子對抗,2013,36(1):37-39.
[7] 呂晶晶,姚金杰.基于最小二乘和牛頓迭代法的空中目標定位[J].微電子學與計算機,2011,28(9):108-110.
[8] 王好同,馬鈺,李偉明.無源測距定位系統設計中的GDOP分析[J].信號處理,2012,28(1):124-129.
[9] 趙琨,何青益.基于GDOP的三站時差定位精度分析[J].無線電工程,2012,42(5):15-17.
[10] 王超,于悅.運動干涉儀平臺上單站無源定位算法研究[J].現代電子技術,2014,37(12):59-62.