基于浮動(dòng)車數(shù)據(jù)的城市道路行程時(shí)間估計(jì)
2018-06-20 06:51:44李演洪
交通運(yùn)輸工程與信息學(xué)報(bào) 2018年2期
羅 霞,曹 陽(yáng),劉 博,李演洪
?
基于浮動(dòng)車數(shù)據(jù)的城市道路行程時(shí)間估計(jì)
羅 霞,曹 陽(yáng),劉 博,李演洪
(西南交通大學(xué),交通運(yùn)輸與物流學(xué)院,成都 610031)
為提高城市道路行程時(shí)間估計(jì)模型的準(zhǔn)確度和有效性,本文利用浮動(dòng)車數(shù)據(jù),依據(jù)對(duì)傳統(tǒng)模型思路的總結(jié)分別建立了基于路段長(zhǎng)度比例和點(diǎn)速度調(diào)和平均值的兩種行程時(shí)間初階估計(jì)模型,并利用統(tǒng)計(jì)學(xué)中的同分布融合思想建立了行程時(shí)間融合模型,以修正初階模型結(jié)果的精度,彌補(bǔ)傳統(tǒng)估計(jì)模型中準(zhǔn)確度低、效率不高的缺陷。最后選取成都市具有代表性的路網(wǎng)區(qū)域?yàn)樗憷?yàn)證了初階模型假設(shè)分布的正確性,同時(shí)計(jì)算出融合模型路徑總時(shí)間的平均偏差僅為12%,說明了融合模型的準(zhǔn)確度和有效性。
交通工程;行程時(shí)間估計(jì);同分布融合;浮動(dòng)車數(shù)據(jù)
0 引 言
行程時(shí)間作為評(píng)價(jià)道路運(yùn)行性質(zhì)的關(guān)鍵信息參數(shù)之一,能夠?yàn)槌鲂姓呗窂降倪x擇及交通部門管理措施的制定提供決策依據(jù),有助于提高交通流時(shí)空分布的合理性。浮動(dòng)車數(shù)據(jù)憑借其精度高、覆蓋廣、成本低的特點(diǎn)已經(jīng)成為估計(jì)行程時(shí)間常用的數(shù)據(jù)源之一[1]。目前國(guó)內(nèi)外提出的方法主要有兩大類,分別是理論解析法和實(shí)際工程模型[2]。
理論解析法主要是利用數(shù)學(xué)理論方法計(jì)算道路行程時(shí)間。Yang等人利用卡爾曼濾波方法構(gòu)建了行程時(shí)間的預(yù)測(cè)模型[3,4],該方法自適應(yīng)性較差,要得到較準(zhǔn)確的結(jié)果需要考慮交通流環(huán)境的影響因素,對(duì)輸入?yún)?shù)的類別要求較高;Zheng結(jié)合卡爾曼濾波模型提出了集成的擴(kuò)展指數(shù)平滑方法[5];楊立娟同樣利用指數(shù)平滑方法,并融合了神經(jīng)網(wǎng)絡(luò)模型和ARMA(自回歸滑動(dòng)平均模型)[6],這兩類方法對(duì)數(shù)據(jù)量的要求都較高,數(shù)據(jù)量不夠多時(shí)無法得到較準(zhǔn)確的結(jié)果;Hofleitner等人基于貝葉斯方法實(shí)現(xiàn)了行程時(shí)間的估計(jì)[7];Rahmani利用統(tǒng)計(jì)學(xué)方法提出了非參數(shù)估計(jì)模型,利用計(jì)算得到的平均值作為行程時(shí)間結(jié)果[8]。雖然貝葉斯方法和非參數(shù)估計(jì)模型可以求得較準(zhǔn)確的路段行程時(shí)間結(jié)果,但當(dāng)車輛GPS(Global Positioning System)數(shù)據(jù)量較多時(shí)算法的運(yùn)行效率會(huì)顯著降低。
實(shí)際工程模型則是將研究重心放在了更微觀的層面,即從單車行程時(shí)間分析入手,一般是通過對(duì)一定時(shí)間內(nèi)特定路段中記錄的瞬時(shí)速度進(jìn)行分析計(jì)算獲得行程時(shí)間。如武小云利用不同時(shí)間間隔內(nèi)的車輛平均速度計(jì)算行程時(shí)間,最終以行程時(shí)間序列標(biāo)準(zhǔn)差離散程度最小為取值標(biāo)準(zhǔn)[9],這一類方法完全忽略了交叉口延誤,得出的路段行程時(shí)間結(jié)果誤差較大。為彌補(bǔ)這一缺陷,充分考慮車輛在交叉口的延誤,一些學(xué)者不再將速度作為主要研究對(duì)象,而是利用相鄰數(shù)據(jù)點(diǎn)間記錄的時(shí)間、速度以及行駛距離等參數(shù)推斷車輛經(jīng)過路段節(jié)點(diǎn)的時(shí)刻,進(jìn)而通過數(shù)理分析方法得到相應(yīng)的路段行程時(shí)間結(jié)果。如王志建總結(jié)了低頻數(shù)據(jù)在交叉口附近相鄰數(shù)據(jù)點(diǎn)的四種分布,并根據(jù)車輛運(yùn)行特征計(jì)算了通過交叉口的時(shí)刻[10],但該方法僅著重分析了車輛在交叉口的延誤,未考慮車輛在非交叉口區(qū)域的速度變化。
為提高行程時(shí)間估計(jì)精度,本文綜合上述兩類方法思想,提出了一種基于路段長(zhǎng)度比例和點(diǎn)速度調(diào)和平均數(shù)的同分布融合模型。模型解決了理論解析法中的算法結(jié)構(gòu)復(fù)雜的問題,效率得到了較大的改善。同時(shí),充分考慮了交叉口延誤和車輛速度變化,準(zhǔn)確度相較于實(shí)際工程模型有了明顯的提高。最后,本文還選取成都市部分有代表性的路網(wǎng)進(jìn)行了行程時(shí)間計(jì)算,并以一條特定路徑實(shí)際行程時(shí)間為基準(zhǔn),對(duì)結(jié)果準(zhǔn)確性進(jìn)行了分析。
1 行程時(shí)間初階估計(jì)模型
利用地圖匹配方法,可以重建車輛行駛軌跡[11],得到車輛經(jīng)過的軌跡矩陣和各GPS點(diǎn)對(duì)應(yīng)的真實(shí)匹配點(diǎn)矩陣,其中包含了軌跡經(jīng)過的所有路段信息,包含了GPS點(diǎn)的實(shí)際位置、時(shí)間及速度信息。以獲得的信息為基礎(chǔ),本文提出了兩種行程時(shí)間的初階估計(jì)模型思路:思路一是依據(jù)路段長(zhǎng)度占軌跡總長(zhǎng)度的比例制定各路段權(quán)重,進(jìn)而將路徑時(shí)間分配到各路段上;思路二是根據(jù)匹配到各路段上的GPS點(diǎn)記錄的點(diǎn)速度進(jìn)行路段行程時(shí)間估計(jì)。這兩類方法各有利弊,第一種考慮了節(jié)點(diǎn)(交叉口)延誤但并不精確,而且沒有分析車輛速度的變化;第二種考慮了車輛速度的變化但是得到的結(jié)果并沒有完全包含節(jié)點(diǎn)延誤時(shí)間。基于這兩類方法在一定程度上可以互相補(bǔ)充,本節(jié)先分別利用這兩種模型初步計(jì)算路段行程時(shí)間,在下一節(jié)中進(jìn)一步建立融合模型,同時(shí)考慮車輛速度的變化和節(jié)點(diǎn)延誤,提高估計(jì)結(jié)果的準(zhǔn)確度。另外,由于不同時(shí)段交通情況可能會(huì)出現(xiàn)較大的改變,如平峰期和高峰期,因此下文建模時(shí)僅選擇同一時(shí)段的浮動(dòng)車數(shù)據(jù)。
1.1 基于長(zhǎng)度比例的行程時(shí)間估計(jì)模型
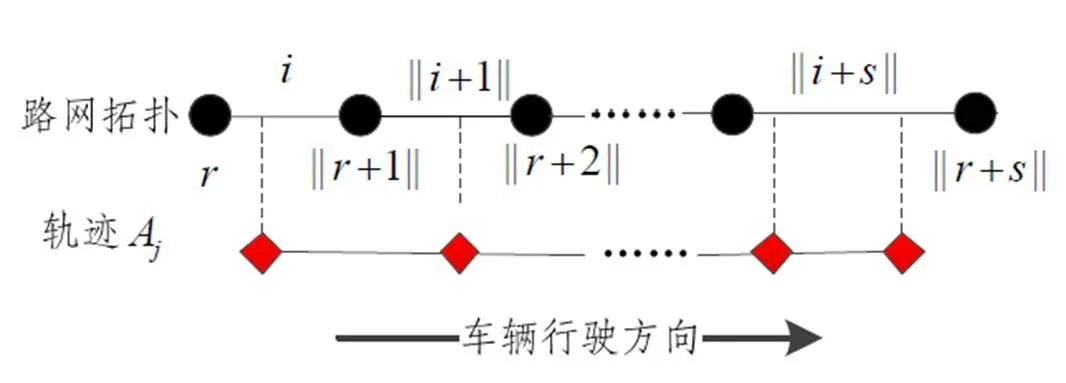
圖1 軌跡匹配示意圖



通過模型建立的過程可以發(fā)現(xiàn),在以路段長(zhǎng)度比例為權(quán)重計(jì)算節(jié)點(diǎn)時(shí)刻時(shí),由于對(duì)整條軌跡的行程時(shí)間進(jìn)行了劃分,得出的路段行程時(shí)間結(jié)果包含了車輛在節(jié)點(diǎn)處的延誤,但是這一延誤被均勻分配到了路段上,結(jié)果并不能保證完全準(zhǔn)確。同時(shí),該方法沒有考慮車輛的速度變化,默認(rèn)車輛記錄的GPS點(diǎn)與點(diǎn)之間的速度不變,這對(duì)于低頻數(shù)據(jù)來說誤差將變大。
1.2 基于點(diǎn)速度調(diào)和平均值的行程時(shí)間估計(jì)模型

用式(2)計(jì)算出來的路徑總行程時(shí)間與實(shí)際總時(shí)間相比往往會(huì)存在偏差,如圖2所示。
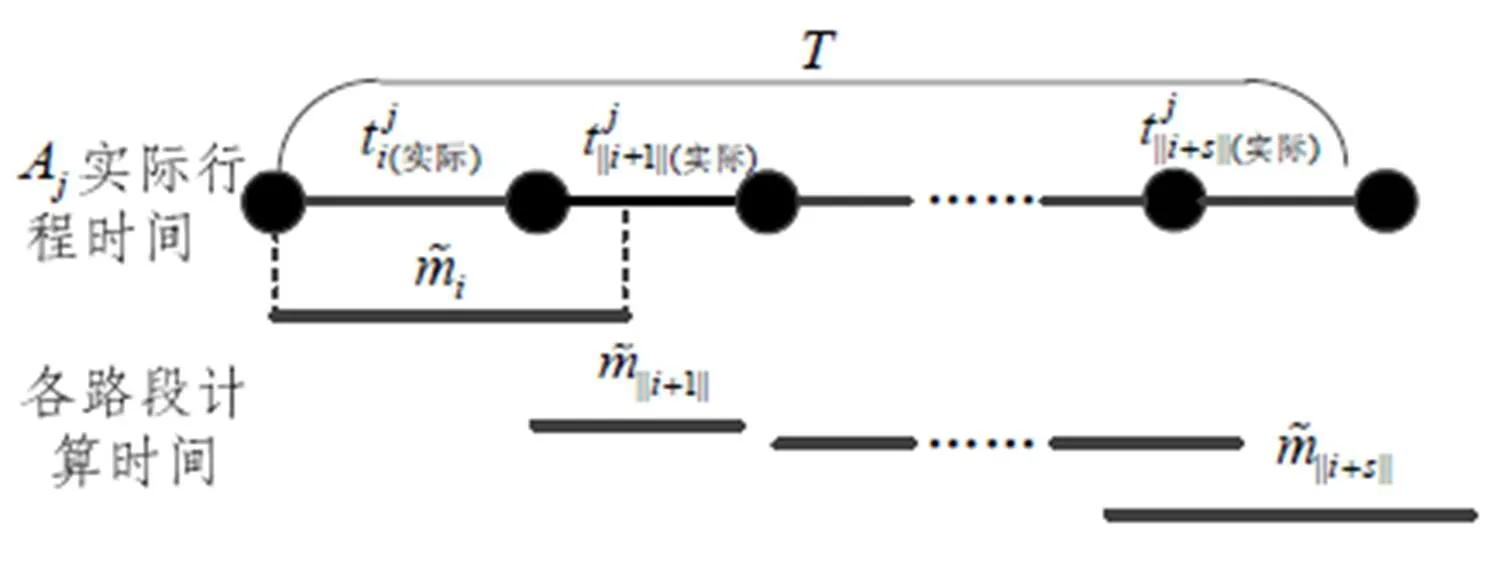
圖2 實(shí)際行程時(shí)間與計(jì)算所得時(shí)間偏差示意圖

采用上述方法即可得到分布均值和方差。可以發(fā)現(xiàn),基于點(diǎn)速度調(diào)和平均值來估計(jì)行程時(shí)間能夠充分體現(xiàn)出車輛在行駛過程中的速度變化,但是車輛的GPS點(diǎn)往往都沒有完全定位到節(jié)點(diǎn)上,對(duì)于節(jié)點(diǎn)處的延誤這一方法并不能準(zhǔn)確計(jì)算,甚至?xí)耆雎裕虼舜嬖谡`差。
2 同分布融合估計(jì)模型
為保證最終結(jié)果的合理性,將拒絕概率的界限值設(shè)為0.7,即,說明原假設(shè)不成立,接受計(jì)算出來的路段行程時(shí)間分布;否則,說明計(jì)算結(jié)果不理想,需按照步長(zhǎng)繼續(xù)用M-H方法從剩余樣本量中抽取,直至更新得到拒絕或者該路段的樣本量已全部計(jì)算完。為了提高效率以及充分利用樣本,可將取值為2。綜上所述,路段行程時(shí)間估計(jì)的算法流程如圖3所示。

3 算例分析
以成都市2014年11月9日7:30~9:00早高峰時(shí)段的浮動(dòng)車數(shù)據(jù)為例進(jìn)行計(jì)算,該浮動(dòng)車為出租車,原始數(shù)據(jù)量較大這里不再列出。選取市內(nèi)具有代表性的路網(wǎng)進(jìn)行算例分析,路網(wǎng)邊界由金房苑路、群星路、九里堤路、一環(huán)路、紅星路等構(gòu)成,其經(jīng)度范圍為104.042 45°~104.101 56°,緯度范圍為30.658 64°~30.710 57°。選取該區(qū)域作為研究對(duì)象的原因有兩點(diǎn):首先,區(qū)域包含學(xué)校和CBD地區(qū),出行量較大,從而能獲得足夠多的浮動(dòng)車數(shù)據(jù)量來支撐計(jì)算;其次,本研究實(shí)驗(yàn)室位于西南交通大學(xué),前往CBD地區(qū)的人員和次數(shù)都較多,便于實(shí)際行程時(shí)間的獲取進(jìn)而實(shí)現(xiàn)模型驗(yàn)證。選取的路網(wǎng)如圖4所示。
3.1 假設(shè)分布檢驗(yàn)
以西體北路路段作為示例,來驗(yàn)證基于長(zhǎng)度比例(模型1)和基于點(diǎn)速度(模型2)計(jì)算行程時(shí)間的結(jié)果是否分別服從所假設(shè)的對(duì)數(shù)正態(tài)分布和標(biāo)準(zhǔn)正態(tài)分布。兩種計(jì)算結(jié)果均隨機(jī)選取40個(gè)樣本量,其中基于路段長(zhǎng)度比例思路中需要對(duì)計(jì)算結(jié)果作對(duì)數(shù),再作正態(tài)分布檢驗(yàn)。通過SPSS軟件的非參數(shù)檢驗(yàn)中K-S方法進(jìn)行分析,假設(shè)分布檢驗(yàn)的結(jié)果如表1和圖5所示。
表1 初階估計(jì)模型的假設(shè)分布檢驗(yàn)參考值
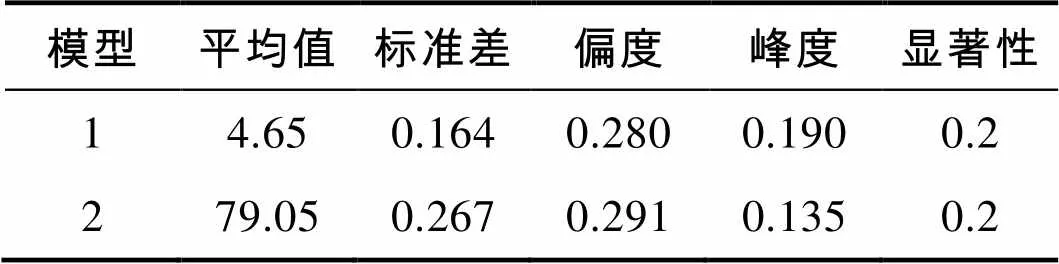
Tab.1 The reference values of the hypothesis distribution test of the initial estimation models
從上表中看出,兩種方法的偏度和峰度值均小于1,且漸進(jìn)顯著性均大于0.05。同時(shí),從圖5也可近似看出兩種數(shù)據(jù)類型服從正態(tài)分布,因此證明了這兩種思路的原假設(shè)是成立的。
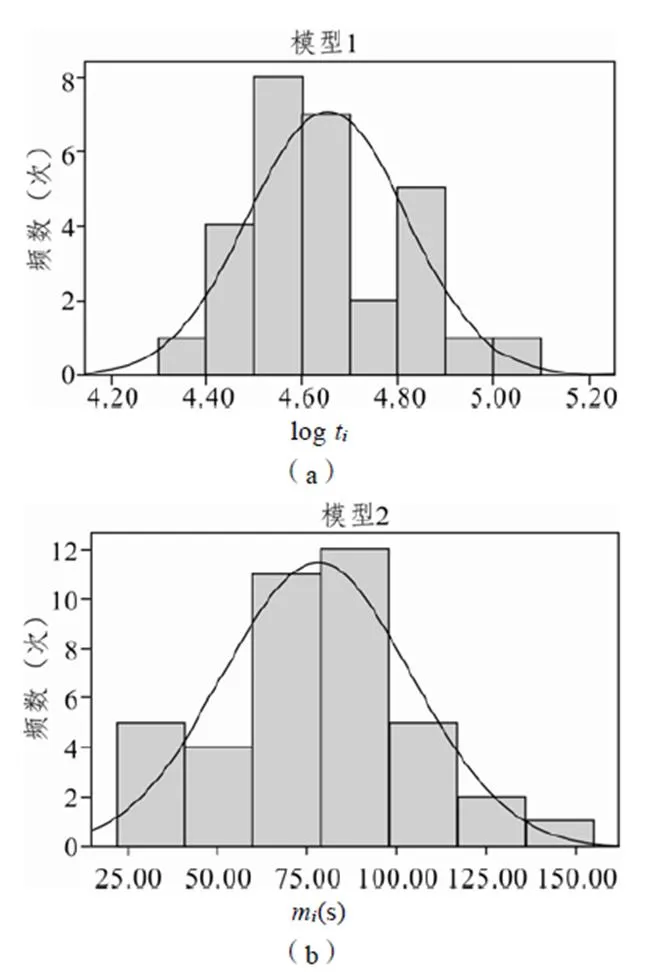
圖5 兩種思路的假設(shè)分布檢驗(yàn)
3.2 結(jié)果對(duì)比分析
進(jìn)一步對(duì)兩種初階模型進(jìn)行融合,進(jìn)而得到路網(wǎng)中各路段最終的行程時(shí)間結(jié)果,如圖4所示。為驗(yàn)證結(jié)果合理性,以西南交通大學(xué)北門至天府廣場(chǎng)為例進(jìn)行分析驗(yàn)證,見圖4加粗顯示路徑。以7:30~9:00坐出租車的實(shí)際出行時(shí)間為參照,連續(xù)試驗(yàn)3天,并將這3天的數(shù)據(jù)進(jìn)行平均作為最終所得數(shù)據(jù),判斷該路徑上的上述幾種思路的效果以及融合方法所計(jì)算路段行駛時(shí)間的準(zhǔn)確程度。
以所選的路徑為例,將初階估計(jì)模型和同分布融合模型的結(jié)果與實(shí)際路段的行程時(shí)間結(jié)果進(jìn)行對(duì)比,如表2所示。根據(jù)結(jié)果進(jìn)一步分析偏差,得到如圖6所示的偏差對(duì)比圖。
表2 三種行程時(shí)間估計(jì)結(jié)果對(duì)比
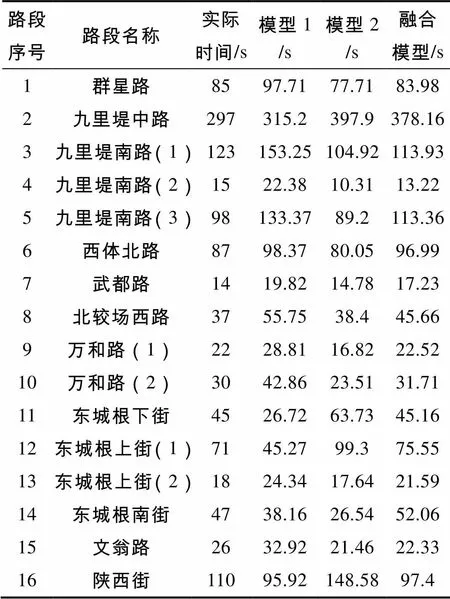
Tab.2 The comparison of estimation results of the three times
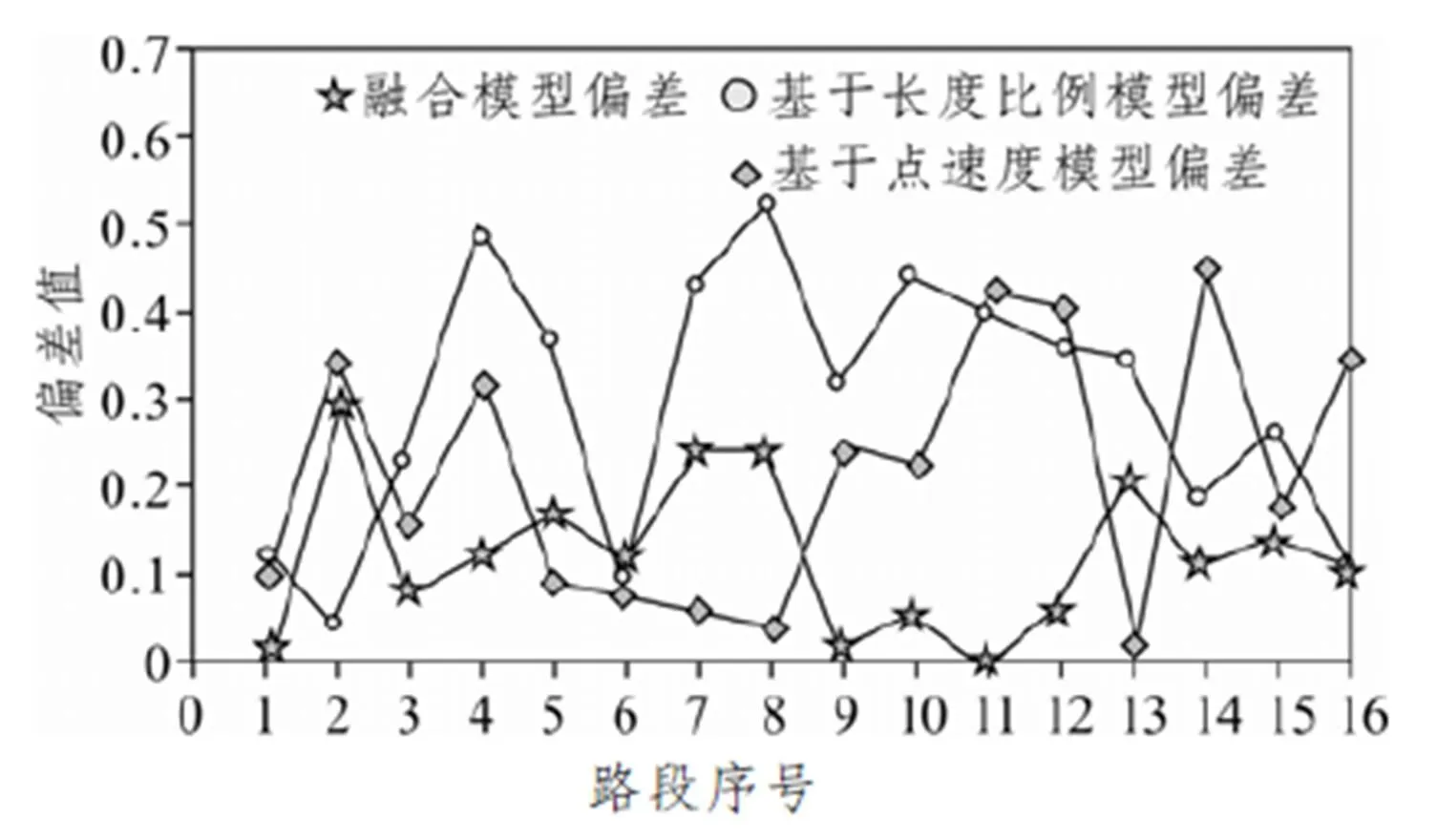
圖6 三種模型偏差結(jié)果
從圖6中可以發(fā)現(xiàn),基于長(zhǎng)度比例和基于點(diǎn)速度的模型所得結(jié)果偏差波動(dòng)較大,并且偏差在30%以上的結(jié)果較多,有的甚至高達(dá)40%以上,因此可以說明初階模型估計(jì)的結(jié)果并不準(zhǔn)確。而融合后的模型偏差值大大降低,并且比較穩(wěn)定,只有少數(shù)路段偏差大于20%,說明融合后路段行程時(shí)間估計(jì)值的準(zhǔn)確度有了大幅提升。其中發(fā)現(xiàn)偏差較大的有路段行程時(shí)間過長(zhǎng)的九里堤北路和過短的武都路,九里堤北路是擁堵較為常發(fā)的路段,其車輛行程時(shí)間變化幅度較大;而武都路,并不是由于變化量大,而是由于本身基數(shù)較小的原因?qū)е碌摹A硗猓捎趯?shí)測(cè)數(shù)據(jù)的時(shí)間與所采用的GPS數(shù)據(jù)日期不同,交通條件在不斷變化,也是誤差的來源之一。
對(duì)三種模型計(jì)算平均偏差,可以發(fā)現(xiàn)基于長(zhǎng)度比例的行程時(shí)間估計(jì)方法偏差最高,平均值達(dá)30%,而基于點(diǎn)速度的行程時(shí)間估計(jì)方法偏差次之,平均值達(dá)21%。這是因?yàn)楹笳卟粌H以速度區(qū)別各路段,在計(jì)算的過程中也考慮了路段長(zhǎng)度,并由路徑總行程時(shí)間作了總量控制。而融合方法的平均偏差為12%,相對(duì)較低。綜合以上分析,與前初步估計(jì)模型的計(jì)算結(jié)果比較,融合方法的計(jì)算結(jié)果偏差更小,路段行程時(shí)間更為精準(zhǔn)。若采用的GPS浮動(dòng)車數(shù)據(jù)的規(guī)模更大,其他軟硬件設(shè)施更加完備的情況下,相信所獲取的結(jié)果將更貼合實(shí)際的路網(wǎng)情況。
4 結(jié)束語(yǔ)
本文對(duì)傳統(tǒng)的實(shí)際工程模型加以改進(jìn),提出了利用路段長(zhǎng)度比例和點(diǎn)速度調(diào)和平均數(shù)初步估計(jì)路段行程時(shí)間的方法,并在這一基礎(chǔ)上,結(jié)合統(tǒng)計(jì)學(xué)思想,對(duì)初步估計(jì)模型的結(jié)果加以融合,得到更加準(zhǔn)確的城市道路行程時(shí)間。與傳統(tǒng)方法相比,不僅提高了結(jié)果的精確度,還降低了算法的復(fù)雜程度,使得估計(jì)過程更加易于實(shí)現(xiàn)。通過分析實(shí)際算例結(jié)果,可以發(fā)現(xiàn)行程時(shí)間估計(jì)模型得出的各路段時(shí)間值與真實(shí)值存在一定的偏差,但大部分在可接受的范圍內(nèi),整條路徑的行程時(shí)間偏差較小,因此說明本文提出的時(shí)間估計(jì)模型具備有效性。
由于基于路段長(zhǎng)度比例和基于點(diǎn)速度的兩種模型對(duì)于交叉口延誤的計(jì)算都不完全準(zhǔn)確,因此融合后的算法在這一方面仍考慮得不夠完善,如何合理有效地估計(jì)交叉口延誤需要在下一階段研究中進(jìn)一步深入探討。
[1] SHALABY A S, ABDULHAI B, BYON Y J. GISTT: GPS-GIS integrated system for travel time surveys[D]. England: University of Toronto, 2006.
[2] 李慧兵, 楊曉光, 羅莉華. 路段行程時(shí)間估計(jì)的浮動(dòng)車數(shù)據(jù)挖掘方法[J]. 交通運(yùn)輸工程學(xué)報(bào), 2014, 14(6): 100-116.
[3] YANG J S. Travel time prediction using the GPS test vehicle and Kalman filtering techniques[C]// American Control Conference, Portland: IEEE, 2005: 2128-2133.
[4] HAGE R M, BETAILLE D, PEYRET F, et al. Unscented Kalman filter for urban network travel time estimation[J]. Procedia-Social and Behavioral Sciences, 2012, 54(2290): 1047-1057.
[5] ZHENG F, WAN Y, WU P. Link travel-time prediction using extended exponential Smoothing and Kalman filter in dynamic networks[C]// Eighth International Conference of Chinese Logistics and Transportation Professionals. Chengdu: ASCE, 2009: 3753-3759
[6] 楊立娟. 基于浮動(dòng)車的城市道路行程時(shí)間采集與預(yù)測(cè)方法研究[D]. 長(zhǎng)春: 吉林大學(xué), 2007.
[7] HOFLEITNER A, HERRING R, ABBEEL P, et al. Learning the dynamics of arterial traffic from probe data using a dynamic bayesian network[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4): 1679-1693.
[8] RAHMANI M, JENELIUS E, KOUTSOPOULOS H N. Non-parametric estimation of route travel time distributions from low-frequency floating car data[J]. Transportation Research Part C Emerging Technologies, 2015, 58: 343-362.
[9] 武小云. 基于GPS浮動(dòng)車的城市交通路段行程時(shí)間實(shí)時(shí)估算方法研究[D]. 廣州: 華南理工大學(xué), 2010.
[10] 王志建, 馬超鋒, 李梁. 低頻GPS數(shù)據(jù)和交叉口延誤下的行程時(shí)間估計(jì)[J]. 西南交通大學(xué)學(xué)報(bào), 2015, 50(2): 361-367.
[11] CHANDIO A A, TZIRITAS N, ZHANG F, et al. An approach for map-matching strategy of GPS-trajectories based on the locality of road networks[J]. Lecture Notes in Computer Science, 2015, 9502(1): 234-246.
[12] 漸猛. 基于浮動(dòng)車的道路交通狀態(tài)判別方法研究[D]. 淄博: 山東理工大學(xué), 2013.
(中文編輯:李愈)(英文審改:胡路)
Travel Time Estimation for Urban Roads Based on Floating Car Data
LUO Xia,CAO Yang,LIU Bo,LI Yan-hong
(School of Transportation and Logistics, Southwest Jiaotong University, Chengdu 610031, China)
To improve the accuracy of the model for estimating travel time of urban roads, based on we develop two kinds of initial estimation models of travel time based on the length ratio of the road and the mean value of the point velocity respectively. The two models employ the floating car data and the traditional model idea. Then a travel time fusion model is developed based on the same-distribution fusion ideas in statistics, which corrects the accuracy of the initial estimation models. This also improves the accuracy and efficiency of the tradition models. Finally, a representative road network area in Chengdu is selected as an example. The correctness of the hypothetical distribution of the initial estimation models are verified and the average deviation of the total path time of the fusion model is calculated to be only 12% , demonstrating the accuracy and validity of the fusion model.
traffic engineering; travel time estimation; same-distribution fusion; floating car data
1672-4747(2018)02-0001-08
U491.1
A
10.3969/j.issn.1672-4747.2018.02.001
2017-04-07
成都市科技項(xiàng)目(2015-RK00-00208-ZF)
羅霞(1962—),女,四川樂至人,西南交通大學(xué)交通運(yùn)輸與物流學(xué)院教授,研究方向?yàn)橹悄芙煌ā?/p>
羅霞,曹陽(yáng),劉博,等. 基于浮動(dòng)車數(shù)據(jù)的城市道路行程時(shí)間估計(jì)[J]. 交通運(yùn)輸工程與信息學(xué)報(bào), 2018, 16(2): 1-8.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34