基于SMA驅動模塊的仿生水母機器人
2018-06-28 08:14:32,,,,
機械與電子 2018年6期
,, , ,
(中國科學技術大學工程科學學院精密機械與機密儀器系,安徽 合肥 230026)
0 引言
在過去幾十年里,越來越多的學者關注軟體機器人的研究,尤其是在仿生軟體機器人方面,如仿生蚯蚓機器人、章魚機器人、仿生機器魚和象鼻機器人[1-4]等。相比于傳統機器人,仿生軟體機器人采用聚氨酯、高分子材料和橡膠聚合物等柔性材料作為基體,使用少量甚至不使用剛性結構,保證了機器人高仿生性的同時,擁有較高的安全性、靈活性,并能更好地在非結構化環境中運動。以美國為代表的西方國家從20世紀50年代就開始了水下機器人的研究[5-6],早期的水下機器人以特定功能的水下無人機為主,如深潛機器人、潛艇救生機器人,這類機器普遍存在結構復雜、噪音大、維護難和成本高等問題,一定程度上限制了其應用。20世紀后期以來,隨著智能驅動材料[7-9]研究的深入,一系列基于此類材料的仿生水下機器人被設計出來[10-11],這類機器人具有高效率、低噪聲、高機動和高速等優點,受到國內外學者廣泛的關注。
水母作為最古老的海洋生物之一[7],適應絕大部分海洋環境,具有簡單、柔韌的身體結構,游動能量利用率高,噪聲低,成為水下仿生研究對象中的明星[10]。獲取水母運動諸多優點最簡單的方式就是模仿它的結構和推進方式,目前國內外學者在仿生水母機器人研究方面做了很多工作[10-11],但這些工作主要集中在水母機器人的運動的實現,忽略了水母機器人的游動性能,這些水母機器人存在游速慢、體積小、需要外接電源、運動模式單一等不足。
在此,通過改進SMA驅動模塊的結構參數和制造工藝,提出了一種新的水母機器人的設計方案和控制策略。
1 設計與制作
1.1 SMA驅動模塊
隨著材料科學的發展,越來越多基于智能材料柔性驅動器應用在機器人領域,如形狀記憶合金絲驅動器(SMA)、電活性聚合物驅動器(EAP)、金屬離子聚合物復合材料驅動器(IPMC)等,與采用電磁驅動來實現運動精度和負載要求傳統驅動器相比,這些柔性驅動器具有較高的靈活性、兼容性和適應性。其中,基于SMA的柔性驅動器具有結構小巧、變形和力輸出大、驅動方式簡單,以及可控性相對較高的優點[12]。本文將采用SMA完成水母機器人驅動模塊的設計制作。SMA驅動模塊制作工藝流程如圖1a所示,主要分為穿絲、裝模澆注和粘貼回復板3個步驟,其中在裝模時對SMA施加0.5%的預緊力,以保證驅動模塊獲得更大的彎曲角度。
SMA驅動模塊長寬厚分別為100 mm,10 mm,2.5 mm,SMA絲與彈簧鋼的距離為1.5 mm,有效長度為87 mm,由驅動層、回復層和填充層組成。驅動層為2組固定安裝在PCB上的SMA(直徑為0.15 mm,相變溫度為90 ℃,最大變性收縮率為4.5%),SMA的加熱時晶體組織會發生相變,產生的力和位移輸出;回復層為厚度為0.1 mm的彈簧鋼板,在驅動模塊加熱彎曲變形時,彈簧鋼存儲彈性勢能,在驅動模塊冷卻時使其恢復到初始位置;填充層采用具有良好延展性的聚二甲基硅氧烷(PDMS)嵌合SMA和PCB,以減小驅動模塊彎曲變形時反向壓應力對該模塊性能的影響。該驅動模塊在電流作用下具有良好的彎曲變形性能,如圖1b所示。
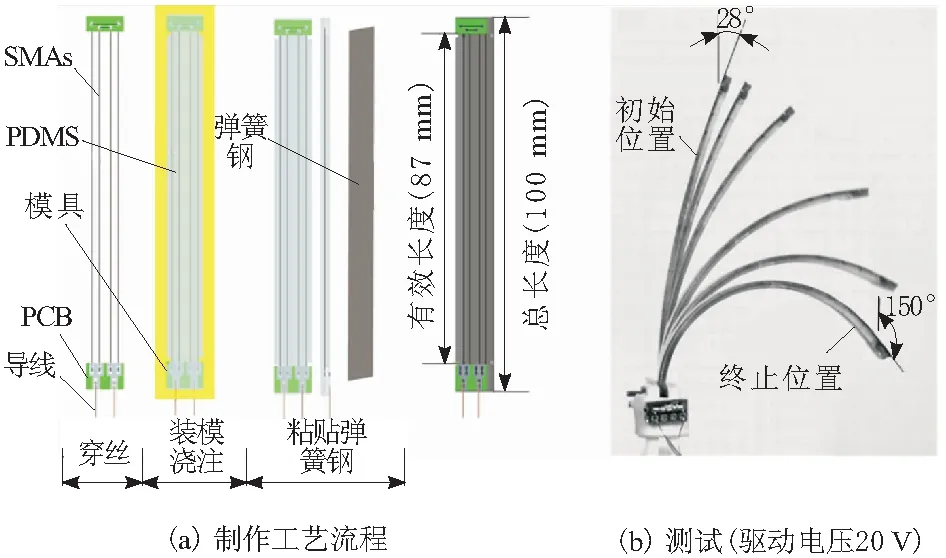
圖1 SMA驅動模塊制作工藝流程及測試
SMA驅動模塊的平均電阻為6 Ω,誤差小于0.5 Ω。為獲得驅動模塊最優的驅動電壓,針對該驅動模塊在不同加載電壓下進行了一系列電性測試,采用高速攝影機對驅動模塊彎曲過程進行采集記錄,實驗結果如圖2所示。加熱過程(圖2a)的實驗結果表明,隨著加載電壓的升高,驅動模塊彎曲變形角度有增大的趨勢,且能更快達到最大彎曲角度。冷卻回復過程(圖2b)的實驗結果表明,過大的加載電壓會導致驅動模塊出現過沖抖動現象,嚴重影響了回復過程的時間,且存在更大的殘余應力,造成驅動模塊很難恢復到初始狀態。因此合適的驅動電壓對于驅動模塊的性能至關重要,經過試驗分析,當驅動電壓為20 V時,驅動模塊表現出相對較優的性能,此時該模塊能產生150°的彎曲變形,及2.48 Hz的動作頻率。
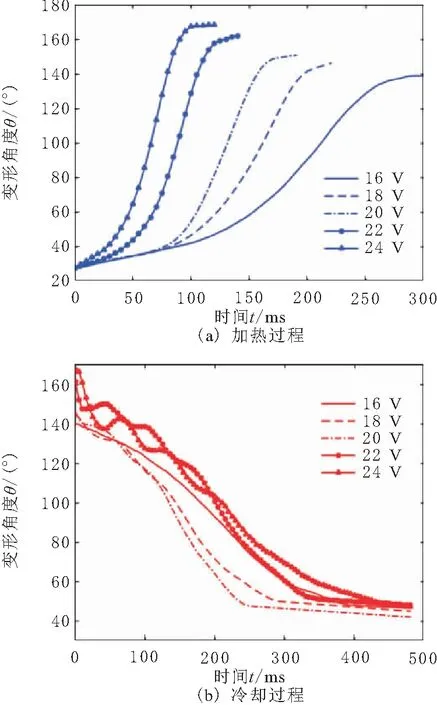
圖2 SMA驅動模塊不同驅動電壓下的彎曲性能
1.2 仿生水母機器人
水母具有簡單、柔軟的對稱結構[13],且大多數水母具有透明或者半透明的鐘狀體結構。作為水母游動的主要結構,鐘狀體的直徑小至2 cm,大至2 m[8]。海月水母作為常見的水母之一,其鐘狀體最大可達45 cm,海月水母機構細節如圖3所示。
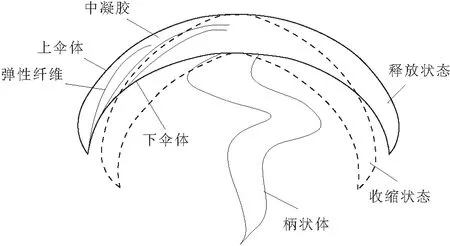
圖3 水母結構拓撲
水母鐘狀體外部和內部稱為上傘體和下傘體,上表皮和下表皮之間為中凝膠層,凝膠層存在彈性纖維[7]。海月水母動作周期分為2步,下傘體肌肉縮短將鐘狀體內部的水排出,形成推進力,同時上傘體和彈性纖維儲存的彈性能量;海月水母沒有回復鐘狀體肌肉,依靠存儲在彈性上傘體和彈性纖維能量回復到釋放狀態[10]。
為模仿海月水母的結構和動作,利用SMA驅動模塊設計如圖4所示的可模塊化組裝水母機器人樣機。該樣機采用6組SMA驅動模塊呈輻射對稱分布,電池組采用6節動力電池(NITECORE IMR18650,輸出電壓為3.6 V,最大電流為30 A)環形分布,電池組有效輸出電壓為20.6 V,電池組及控制電路內置在中心盒,鐘狀體使用厚度為1 mm的彈性硅膠蒙皮。該樣機重512 g,密度為1.031 g/cm3,在松弛狀態如圖4b所示,直徑為210 mm,高度為80 mm。當機器人處于收縮狀態時(圖4c)直徑為142 mm,高度為88 mm。

圖4 水母機器人樣機
2 控制系統
中樞模式發生器(CPG)是一種能在缺乏外部傳感和反饋條件下產生節律輸出生物神經網絡,用于生物節律運動的控制,具有良好的穩定性和適應性[14-15]。目前,CPG模型主要分為2類,即神經元模型和非線性振蕩子模型。瑞士科學家Ijspeert等人[14]構建的非線性自適應耦合模型是典型的非線性振蕩子模型,該模型根據多個控制輸入產生多個協調的節律信號,具有結構簡單、耦合參數整定和輸出正弦穩定等特點。本文對Ijspeert模型重構,并重新定義了模型的輸出,使其能完成水母機器人的步態生成。重構后的模型數學描述為:
(1)
θi和ri分別為振蕩子i相位和幅值的狀態變量;fi和Ri分別為振蕩子i的期望頻率與期望幅值;wij和φij(φij=-φji)分別為振蕩子j對振蕩子i的耦合權重與穩態相位偏置;ai為正常數,它決定了系統調節時間;Si為系統的輸出。值得注意的是,過大的wij和ai都會造成系統不穩定。本文對系統輸出進行了二值化處理,因此期望幅值Ri并不會對系統輸出產生影響,且耦合權重wij和調節常數ai分別設置為200和30,期望頻率fi和相位偏置φij為系統的僅有可調參數。在上述模型的基礎上,建立如圖5所示的CPG網絡。網絡包含6個振蕩子, 編號為振蕩子1~6,分別用水母機器人6個SMA驅動模塊的控制,各個振蕩子之間的耦合關系如圖5所示。該系統輸出為頻率、相位差可調的一組方波信號,不同的頻率和相位差組合對應水母機器人不同游動模式。
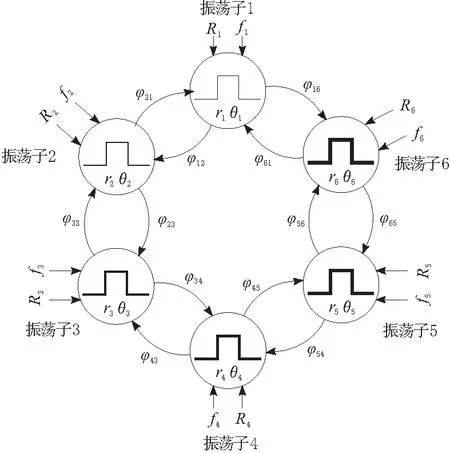
圖5 CPG網絡的拓撲
3 實驗結果
上述提出的水母機器人的結構與控制策略,旨在完成水母機器人多模式游動,為了證明其有效性,進行了一系列水母游動實驗。首先,測試水母機器人在豎直方向上不同頻率的游動效果,如圖6和圖7所示。實驗結果表明:當游動頻率為2 Hz時,水母機器人獲得最大游動速度為5.28 cm/s,此時雖然水母機器人在游速方面獲得了很好的性能,但由于SMA驅動模塊在加熱過程存在熱積累現象,會導致水母機器人快速進入熱死寂狀態,無法長時間持續游動。水母機器人在1 Hz時游動的時序如圖8所示。
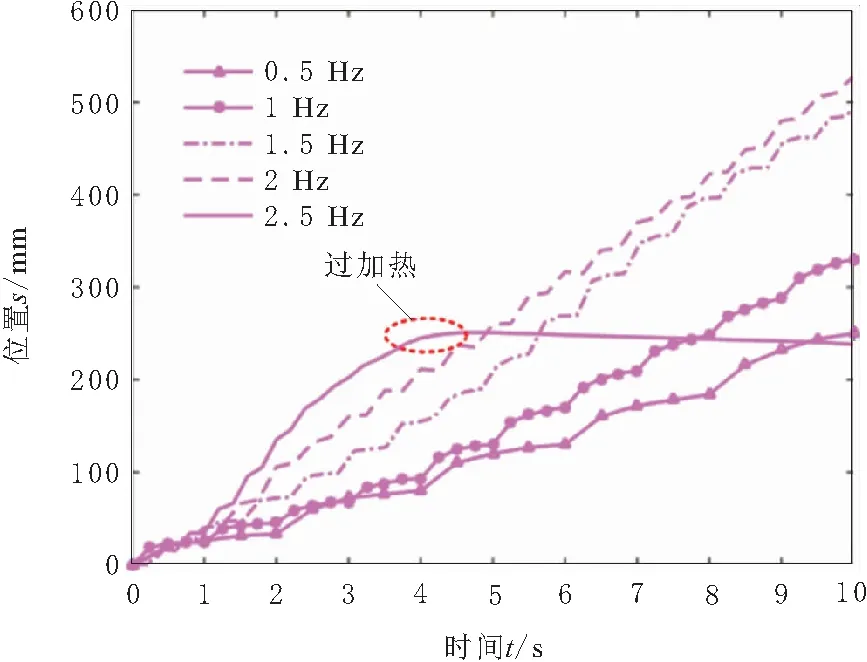
圖6 水母機器人游動過程
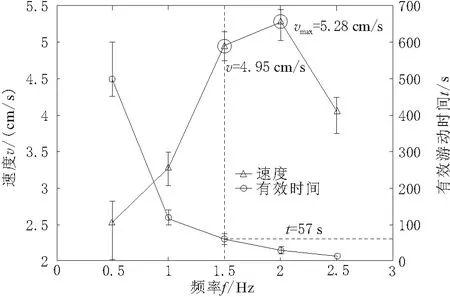
圖7 水母機器人速度、游動時間與頻率關系
當水母機器人的各個SMA驅動模塊動作頻率不同時,水母機器人兩側會產生差速,從而可以實現水母機器人轉彎游動。且當水母機器人同一側3個SMA驅動模塊處于靜止狀態,另外3個SMA驅動模塊以2 Hz的頻率動作時,水母機器人可以獲得最小的轉彎半徑,如圖9所示,最小轉彎半徑為31.95 cm。
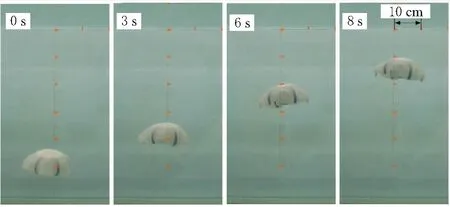
圖8 豎直游動(1 Hz)
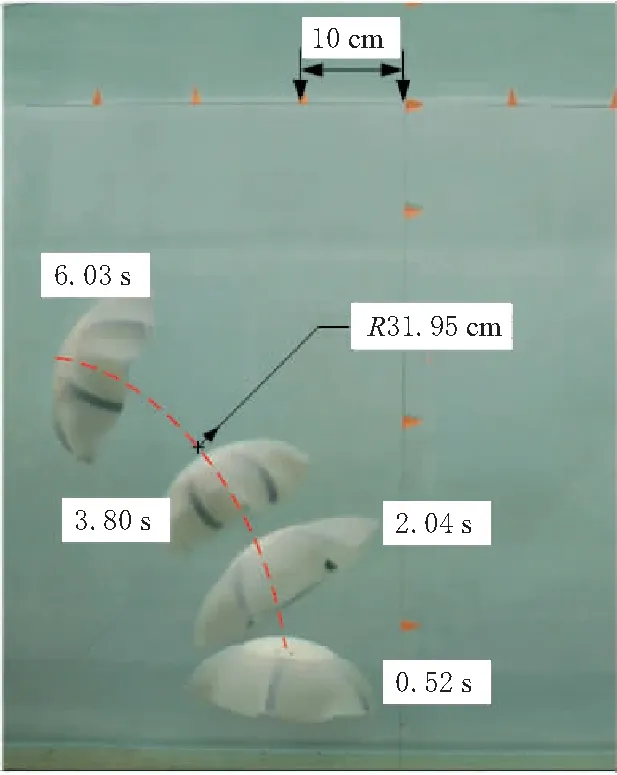
圖9 轉彎游動
4 結束語
提出了一種新穎的仿生水母機器人設計制造方案,該機器人采用射流方式推進,結構簡單、易維護、噪聲低、推進效率高,解決了傳統水下機器人采用螺旋槳推進容易受到電纜、海帶和廢棄漁網等纏繞問題。為實現水母機器人周期性收縮釋放動作,采用新的工藝流程和參數設計制造了一種基于SMA的驅動模塊,該模塊能實現大彎曲變形,超過預期要求。使用中樞模式發生器(CPG)控制策略,設計CPG網絡,用于水母機器人的運動控制,雖然此控制方式不是很穩定,但一定程度上實現水母機器人在三維空間中的多模式游動。與參考文獻中提到的幾款水母機器人相比,本機器人具有更高的綜合性能,如更高的仿生學、更大的尺寸和速度、能實現三維游動、無需外部電源等。在接下來的工作中,將會對水母機器人熱死寂問題深入研究,尋求一種可行的有效的解決方案。
參考文獻:
[1] Kim S, Laschi C, Trimmer B.Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013,31(5):287-294.
[2] Cianchetti M, Calisti M, Margheri L, et al. Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot[J]. Bioinspiration and Biomimetics, 2015,10(3):035003.
[3] Clark A J, Tan X, McKinley P K. Evolutionary multiobjective design of a flexible caudal fin for robotic fish[J]. Bioinspiration and Biomimetics, 2015,10(6):065066.
[4] Hannan M W, Walker I D.Analysis and initial experiments for a novel elephant’s trunk robot[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2000:330-337.
[5] 謝子逸, 翟宇毅.一種新型水下機器人控制系統設計[J].機電一體化,2009,15(9):44-47,51.
[6] 何迪.海洋里的機器人[J]. 航海,1981(1):12-13.
[7] Marut K, Stewart C, Michael T,et al. A jellyfish-inspired jet propulsion robot actuated by an iris mechanism[J]. Smart Materials and Structures, 2013, 22(9):094021.
[8] Ko Y,Na S,Lee Y,et al. A jellyfish-like swimming mini-robot actuated by an electromagnetic actuation system[J]. Smart Materials and Structures, 2012, 21(5):057001.
[9] Jin H,Dong E,Alici G,et al. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires[J]. Bioinspiration and Biomimetics, 2016, 11(5):056012.
[10] Yeom S W, Oh I K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators[J]. Smart Materials and Structures, 2009,18 (8):085002.
[11] Shintake J,Ming A G,Shimojo M.Development of flexible underwater robots with caudal fin propulsion[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010:940-945.
[12] 李寶成,董二寶,李永新,等.新型SMA絲制動器的結構設計與實驗研究[J].機械與電子,2010(1):7-8.
[13] Daniel T L.Cost of locomotion:unsteady medusan swimming[J].Journal of Experimental Biology, 1985,78(8):295-297.
[14] Ijspeert A J.Central pattern generators for locomotion control in animals and robots: a review[J].Neural Netw,2008, 21(4):642-653.
[15] 王揚威,閆勇程,劉凱,等.基于CPG的仿生環形長鰭波動推進器運動控制[J].機器人, 2016,38(6):746-753.
