面向筒類艙段自動裝配的兩點定位調姿方法
2018-06-29 03:03:58金賀榮
中國機械工程 2018年12期
關鍵詞:方向
金賀榮 劉 達
1.燕山大學河北省并聯機器人與機電系統實驗室,秦皇島,066004
2.燕山大學先進鍛壓成型技術與科學教育部重點實驗室,秦皇島,066004
0 引言
在火箭、導彈、衛星等航天器的生產制造過程中,艙段對接是航天器總裝的核心工序,“部裝-總裝”是常用的生產模式,即首先完成對接艙段的組裝生產,然后在總裝時實現各艙段之間的對接[1]。自動對接技術是非人為干涉的自動化對接過程[2],實現對接艙段自動調姿可提高航天器的裝配效率和品質均一性,合理的調姿方法是實現艙段自動調姿對接的關鍵。
在現有的艙段自動調姿技術中,多是采用并聯機構[3?5]或可等效為并聯機構的若干三坐標定位器組成的位姿調整系統來實現部件的自動調姿。易旺民等[6]提出采用6?SPS并聯機構的位姿控制與力控制方式共同實現對接;蔣君俠等[7?8]設計了基于三坐標POGO 柱的適用于三段大部件對接的柔性裝配平臺,并對調姿平臺進行了結構優化;黃翔等[9]發明了基于3?2?1隨動式定位器的飛機部件位姿調整方法,保證飛機部件在調姿過程中不會出現非剛體性運動。在對調姿方法的研究中,張斌等[10]對可等效為6自由度冗余驅動并聯機構的三坐標支撐柱的大型剛體位姿調整系統進行了軌跡規劃,并對各驅動關節設置了約束條件,使調姿過程較為平穩,但冗余驅動存在一定內力,會對弱剛性構件剛度產生影響,而設定的約束條件并沒有考慮這一點;劉繼紅等[11]給出基于關鍵特征的大部件對接位姿調整技術,提高了裝配效率,但大部件對接與間接關鍵特征的提取過程較為復雜,且沒有提出一種基于關鍵特征的大部件對接軌跡規劃方案,仍需一定的人工參與;朱永國等[12]提出了飛機裝配高精度測量控制網的構建方法,測得的機身各部分坐標系可轉換成任意局部坐標系下的坐標,增加了機身的位姿測量與表達的靈活性;王少峰等[13]提出了一種基于精密三坐標定位器四點支撐的大型飛機機身壁板的裝配位姿調整方法,將調姿過程分解為位置與姿態2個調整階段,從而降低了多軸協調控制的難度,但在機身姿態調整過程中仍需多軸協調控制,該系統動力學模型是一個多解的冗余驅動問題,反解較為麻煩;崔學良等[14]針對大尺寸弱剛性構件對接裝配系統進行軌跡規劃,將定位器驅動軸分為非冗余驅動和冗余驅動兩組,通過運動學正反解映射模型對非冗余驅動軸進行同步規劃,對控制水平要求較高;應征等[15]以四定位器調姿機構為研究對象,建立調姿機構的系統動力學控制方程,解決了冗余并聯機構的正動力學建模問題,但基于四定位器調姿機構的軌跡規劃和調姿穩定性問題有待繼續研究。采用上述基于并聯機構或可等效為并聯機構的調姿方法可以實現艙段的自動對接,但是并聯機構由于其結構的復雜性以及運動學和動力學問題的非線性,使得并聯機構的建模和控制都非常困難[16],導致艙段對接效率較低且容易出錯。位姿調整過程的穩定性和調整后的精準度都直接影響裝配后艙體的工作性能。
目前基于關鍵點或關鍵特征的調姿方法,一般是通過檢測調姿對象的關鍵特征或是預先固定在其上的若干關鍵點位置來得到調姿對象在全局坐標系下的位姿矩陣,并采用插補法實時進行軌跡規劃,調姿對象在3個坐標上的姿態偏差同時調整,算法較復雜,如文獻[17]基于鞍點規劃理論的位姿評估模型,通過激光跟蹤儀系統測量機翼上特征點的坐標位置,以及用直線位移傳感器測量機翼水平測量點的高度來對機翼位姿進行評估,得到了機翼的準確位姿,但設置特征點過多,且關鍵特征的提取又較為復雜[11],增加了調姿過程的復雜性。為降低調姿機構的控制難度與簡化調姿算法,本文提出一種兩點定位調姿法,并進行了仿真分析。
1 對接艙段位姿標識
標識對接艙段在空間內的位置和姿態,在裝配空間內建立全局坐標系OXYZ作為基準,結合艙段結構特點建立參考坐標系O1X1Y1Z1。O1X1Y1Z1固定在艙段對接面上,原點O1為對接面的圓心,X1軸過艙段定位銷孔的圓心O2,Z1軸與艙段軸線重合,如圖1所示。
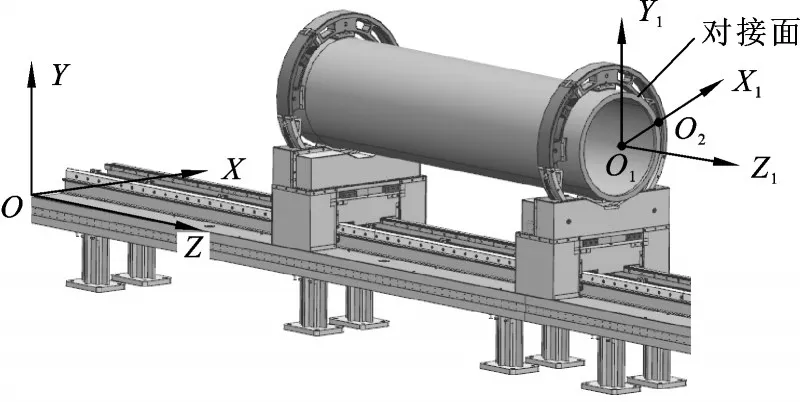
圖1 裝配坐標系Fig.1 Assembly coordinate system
局部坐標系轉換到全局坐標系的旋轉矩陣R和平移矢量T是唯一的[18],對接艙段的空間位姿可以用矢量表示為對接艙段在參考坐標系內的位姿,用矢量N表示為

其中,(XO1,YO1,ZO1)T是O1點在OXYZ內的位置矢量,α、β、γ為O1X1Y1Z1相對于OXYZ的偏轉角、俯仰角、橫滾角,如圖2所示。
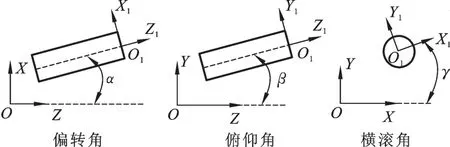
圖2 艙段姿態角Fig.2 Cabin attitude angle
2 兩點定位調姿法
在航天器艙段對接裝配過程中,對接艙段的理想位姿為O1X1Y1Z1與OXYZ平行且同向,即α、β、γ均為0,艙段的位姿調整即消除艙段的偏轉偏差、俯仰偏差、橫滾偏差以及調整艙段在X、Y、Z方向上的位置。為實現對接艙段的位姿調整,本文結合對接艙段的結構特點,提出一種兩點定位調姿法,通過控制對接艙段表面兩點的位置實現艙段位姿的調整。
在對接艙段的艙體表面定義Q1、Q2兩個位置控制點,位置見圖3。過Q1、Q2的直線與艙段軸線平行,Q1點與艙段固定在一起,艙段可隨Q1點一起運動,Q2點對艙段起支撐和限位作用,Q2點始終與艙體表面接觸,艙體可沿Q2點滑動。Q1點和Q2點沿Z向的距離為l1,Q1點到艙段對接面的距離為l2,Q1點和Q2點到艙段軸線的距離為l3。l2為固定值,不隨艙段的不同而變化;l為艙段的長度,艙段不同,l值不同。l1=l-2l2。
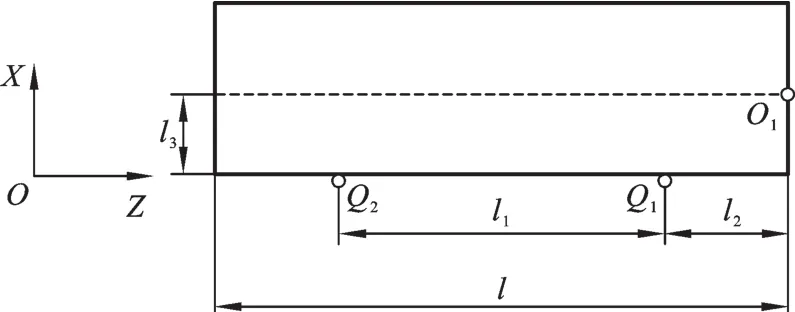
圖3 Q1、Q2點位置示意圖Fig.3 The position ofQ1,Q2
在偏轉調姿過程中,對接艙段的偏轉角為α,則Q1點和Q2點在X方向上存在ΔX1=l1tanα的位置偏差。消除對接艙段的偏轉偏差,Q2點保持固定,Q1點沿X方向水平移動ΔX1的距離,在Q1點的運動過程中,對接艙段隨Q1點運動,由于Q2點對艙段的限位作用,對接艙段沿Q2點滑動,并繞Q2點轉動。偏轉調姿過程見圖4。
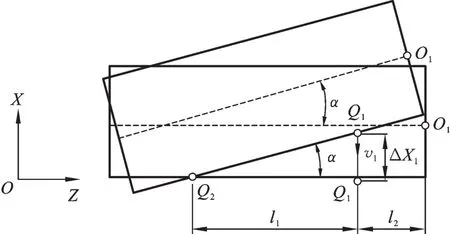
圖4 偏轉調姿原理圖Fig.4 Deflecting attitude principle
在對接艙段的偏轉角由α變為0的過程中,需要保證Q1點和Q2點的位置精度。對接艙段幾何形狀簡單,位置控制點數量少且分布規律。采用在對稱位置設置冗余測量點的方法來補償控制點偏差,進而保證l1的值在偏轉調姿過程中變化趨近于零。
要使得對接艙段以規劃好的理想軌跡fα(t)實現偏轉調姿,Q1點的運動速度v1應滿足:

對式(1)求導得
式中,f?α(t)為對接艙段繞Y軸旋轉角速度,記為ωα,角加速度記為 αα。
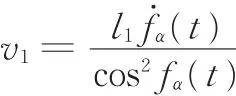
Q1點的動態坐標值為

式中,Pi為Q1點的動態坐標值;R為局部坐標系轉換為全局坐標系的旋轉矩陣;Ji為Q1點在局部坐標系內的位置矢量;vX和vZ分別為O1點在X、Z方向上的運動速度函數。
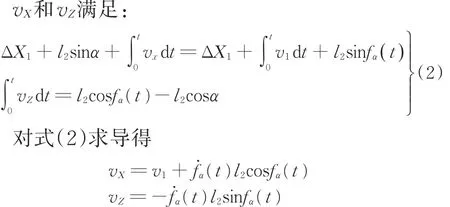
對接艙段俯仰調姿過程中,對接艙段的俯仰角為β,則Q1點和Q2點在Y方向上存在ΔY1=l1tanβ的位置偏差,Q2點保持固定,Q1點沿Y方向移動ΔY1,消除對接艙段的俯仰偏差,俯仰調姿過程見圖5。在對接艙段的俯仰角由β變為0的過程中,在對稱位置設置冗余測量點來補償控制點偏差,l1的值在俯仰調姿過程中變化趨近于零,Q1點的運動速度滿足下式可實現艙段按照俯仰調姿軌跡fβ(t)完成調姿:

對式(3)求導得
式中,f?β(t)為對接艙段繞X軸旋轉角速度,記為ωβ,角加速度記為 αβ。
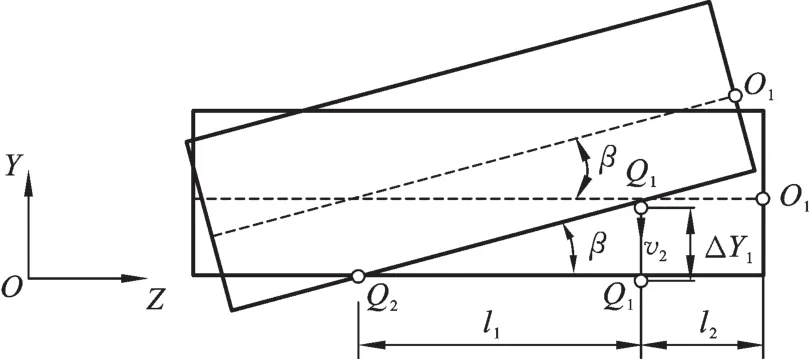
圖5 俯仰調姿原理圖Fig.5 The principle of pitching attitude

橫滾調姿過程中,對接艙段的橫滾角為γ。Q2點保持固定,Q1點繞艙段軸線旋轉γ,則艙段繞自身軸線旋轉γ,冗余測量點補償Q1點的位置偏差,在XY平面內Q1點和Q2盡可能重合,橫滾調姿過程見圖6,橫滾調姿軌跡fγ(t),Q1點繞艙段軸線旋轉的角速度為 f?γ(t),記為 ωγ,角加速度記為αγ。
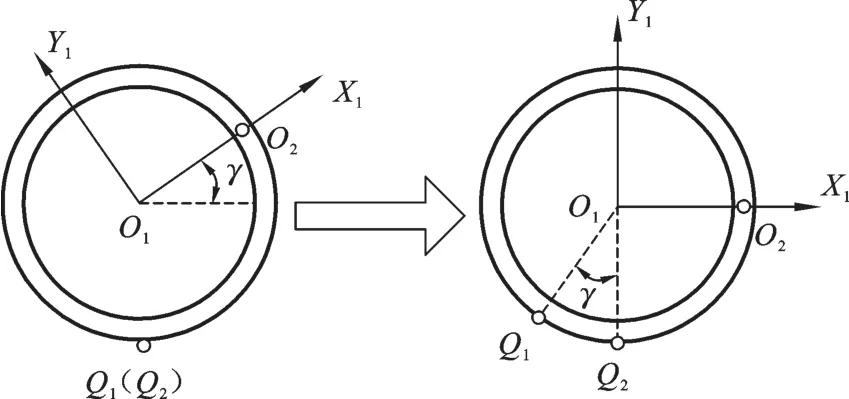
圖6 橫滾調姿原理圖Fig.6 The principle of tilting attitude
對接艙段的姿態調整到位后,對接艙段的局部坐標系與全局坐標系平行,但是待對接的移動艙段和固定艙段仍不同軸,在X、Y方向上存在位置偏差,需調整移動艙段在X、Y方向上的位置。
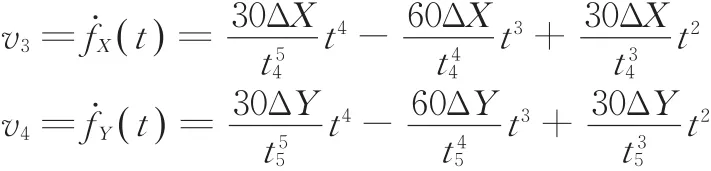
使Q1點與Q2點同步沿X方向運動ΔX,帶動移動艙段在X方向運動ΔX,以消除移動艙段X方向的位置偏差ΔX。使Q1點與Q2點同步沿Y方向運動ΔY,帶動移動艙段在Y方向運動ΔY,以消除移動艙段Y方向的位置偏差ΔY。移動艙段在X、Y方向上與固定艙段的位置偏差消除后,移動艙段的軸線便與固定艙段的軸線同軸,達到可對接狀態。對接艙段在X、Y方向進行位置調整時,Q1點與Q2點在相應方向上同步運動的速度為
移動艙段的位姿調整到位后,使移動艙段沿全局坐標系Z方向運動ΔZ,就可完成與固定艙段的對接。Q1點與Q2點在Z方向上同步運動的速度為

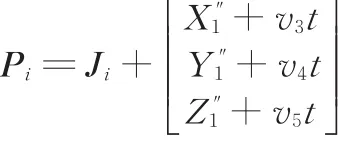
Q1點與Q2點在Z方向上同步運動的加速度記為a5。Q1點的動態坐標值為

對接艙段在X、Y、Z方向進行位置調整時,Q1點的動態坐標值
3 調姿運動軌跡規劃
艙段調姿過程中初始與終止狀態需滿足以下約束條件:
位姿約束

速度約束

加速度約束

式中,t1為偏轉調姿時間;N1為偏轉調姿初始時刻艙段位姿;N2為偏轉調姿終止時刻艙段位姿。
軌跡規劃一般分為粗插補和精插補兩步,為避免調姿過程中裝配系統受到柔性和剛性沖擊,在粗插補時采用S型速度曲線對調姿系統各驅動軸進行軌跡規劃[14],為保證調姿過程平穩、連續、無沖擊,即要得到光滑的速度與加速度曲線,且將調姿運動軌跡方程代入上述約束后能解得全部未知參數,便于調姿過程穩定性分析,本文采用五次多項式軌跡對艙段進行調姿軌跡規劃。以偏轉調姿為例,在對艙段進行偏轉調姿時,艙段偏轉角的變化軌跡表示為

將上述約束條件代入式(5)得
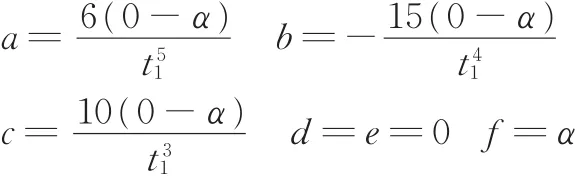
令Δα=0-α,可得偏轉調姿的運動軌跡為

式中,Δα為偏轉調姿過程中的偏轉角變化量。
同理,可求得俯仰調姿、橫滾調姿和位置調整的運動軌跡為
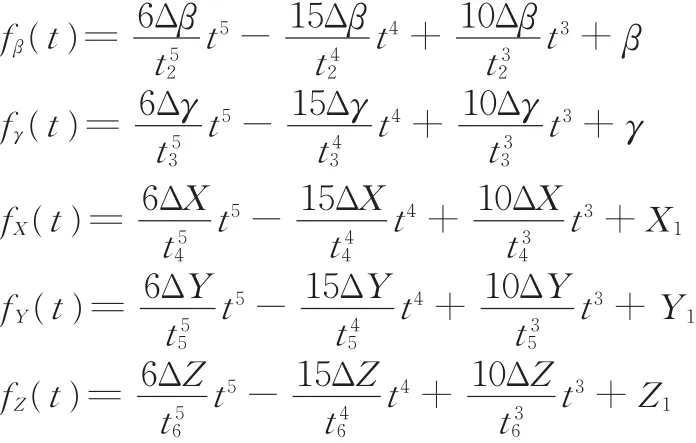
式中,t2、t3、t4、t5、t6分別為俯仰調姿時間、橫滾調姿時間和X、Y、Z方向位置調整時間;Δβ、Δγ、ΔX、ΔY、ΔZ分別為俯仰調姿、橫滾調姿和X、Y、Z方向位置調整過程中的位姿參數變化量。
4 調姿穩定性評價
最優時間法以滿足調姿后狀態所耗時間最短為目標[19],但對于體積較大的艙段,調姿過程的穩定性同樣重要。要想使對接艙段調姿過程平穩,對接艙段在姿態調整時的角加速度以及位置調整時的加速度絕對值應盡可能小。
對接艙段在姿態調整過程中的角加速度為

式中,ΔΩ為對接艙段姿態角α、β、γ調整量,i=1,2,3。
對接艙段質量較大,當對接艙段滿足下式時對接艙段運動平穩:

式中,JΩ為姿態調整過程中對接艙段轉動慣量。
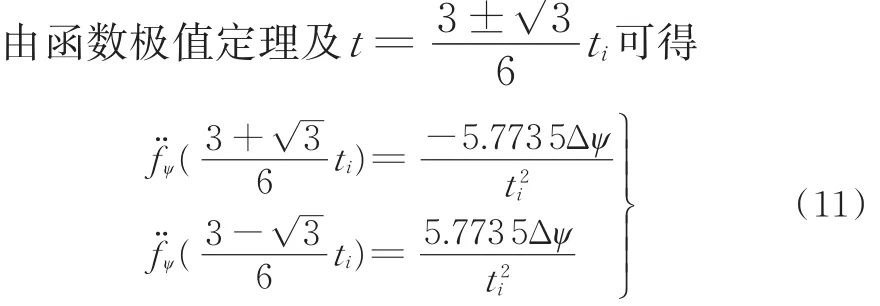
由函數極值定理[20]可得,當時角加速度取得極值,即
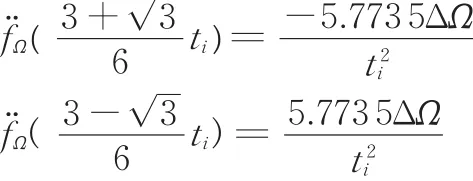
在[0 ti]時間段內,由函數最大值定理可得將式(8)代入(7)可得


調姿時間取ti的最小整數值。
對接艙段在位置調整過程中的加速度

式中,Δψ為對接艙段在X、Y、Z位置調整量,i=4,5,6。
對接艙段在X、Y方向的位置調整滿足下式時對接艙段運動平穩:

式中,m為對接艙段的質量。
在[0 ti]時間段內,由函數最大值定理可得

將式(12)代入式(10)可得

X、Y方向位置調整時間取ti的最小整數值。
對接艙段在Z方向的位置調整距離較大,應兼顧裝配效率與穩定性,當對接艙段的運動滿足下式時對接艙段運動平穩:

所以Z向調整時間t6滿足:

Z向位置調整時間t6取最小整數值。
5 艙段調姿仿真驗證
通過UG8.0軟件建立艙段的仿真模型,并對移動卡環調姿機構和調姿工作臺進行簡化,建立仿真模型(圖7)。將建立的模型導入ADAMS,利用ADAMS修改對接艙段模型各部件屬性,定義O1、O2、O3三個關鍵點,其中,O1點為艙段對接面圓心,O2點為定位銷孔圓心,O3為艙段軸線上一點,其中,l1=905 mm,l2=330 mm,l3=287.58 mm。
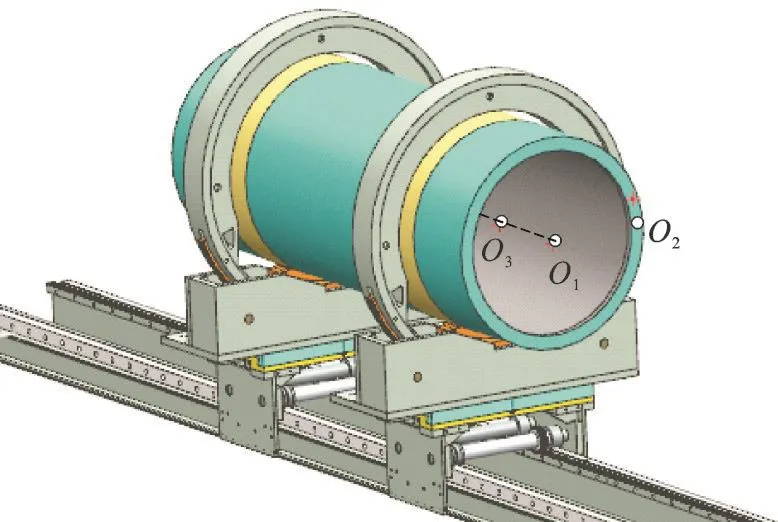
圖7 仿真模型Fig.7 Simulation model
艙段初始位姿為

調姿標位姿為

根據調姿算法要求,在模型上添加相應的運動副、載荷及驅動。由式(8)可得偏轉調姿的偏轉調姿時間t1=4 s、俯仰調姿時間t2=3 s、橫滾調姿時間t3=4 s,由式(11)可得Y方向位置調整時間t4=7 s、X方向位置調整時間t5=7 s,由式(14)可得Z向對接時間t6=17 s。
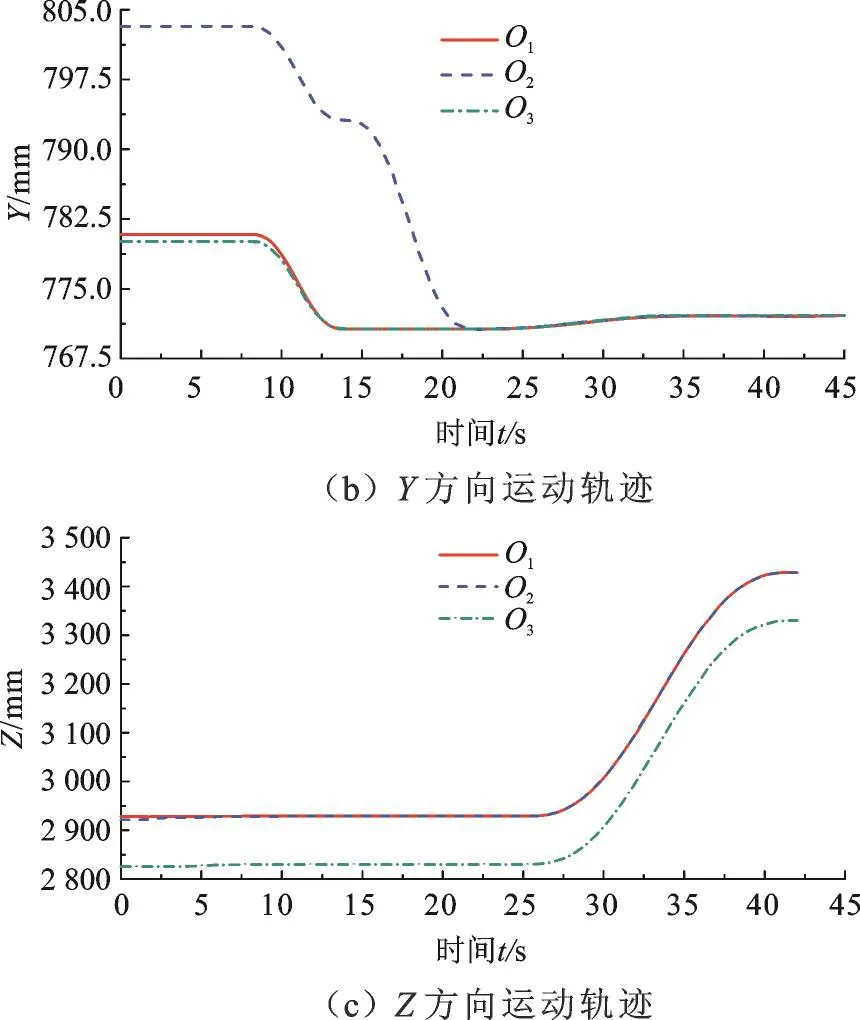
圖8 關鍵點運動軌跡Fig.8 Key point motion trajectory
由圖8a、圖8b可以看出,運動仿真結束后,O1點和O3點的X、Y坐標值相同,說明對接艙段參考坐標系的Z1軸與全局坐標系的Z軸平行,在圖8b中,O2點的Y坐標值在仿真結束后,與O1點和O3點的Y坐標值相同,說明調姿結束后,對接艙段參考坐標系的X1軸與全局坐標系的X軸平行,參考坐標系的X1軸、Z1軸分別與全局坐標系的X軸、Z軸平行,說明艙段達到了目標姿態;由圖8讀出調姿結束后O1點的X、Y、Z坐標分別為409.96 mm、769.92 mm、3 430 mm,與目標坐標值在X軸方向上偏差為-0.04 mm,在Y軸方向上偏差為-0.08 mm,誤差在允許范圍內,O1點位置達到了目標位置。
偏轉調姿過程中,對接艙段軸線(O1O3)繞Y軸旋轉的角速度、角加速度曲線見圖9,角加速度的絕對值最大值為0.36 °/s2,滿足式(8)。
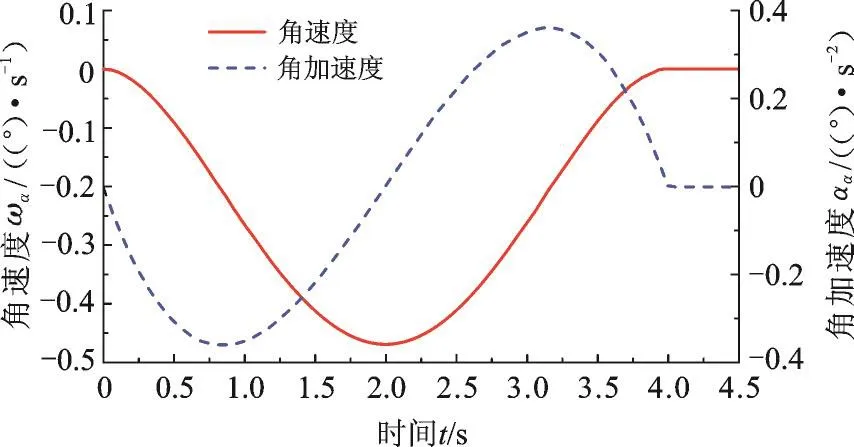
圖9 對接艙段軸線繞Y軸運動的角速度及角加速度Fig.9 The movement angular velocity and acceleration of the axis of docking cabin aroundYaxis
俯仰調姿過程中,對接艙段軸線繞X軸旋轉的角速度、角加速度曲線見圖10,角加速度的絕對值最大值為0.32 °/s2,滿足式(8)。
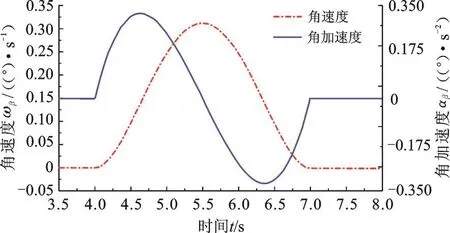
圖10 對接艙段軸線繞X軸運動的角速度及角加速度Fig.10 The movement angular velocity and acceleration of the axis of docking cabin aroundXaxis
橫滾調姿過程中,對接艙段繞自身軸線旋轉的角速度、角加速度曲線見圖11,角加速度最大絕對值為1.8 °/s2,滿足式(8)。
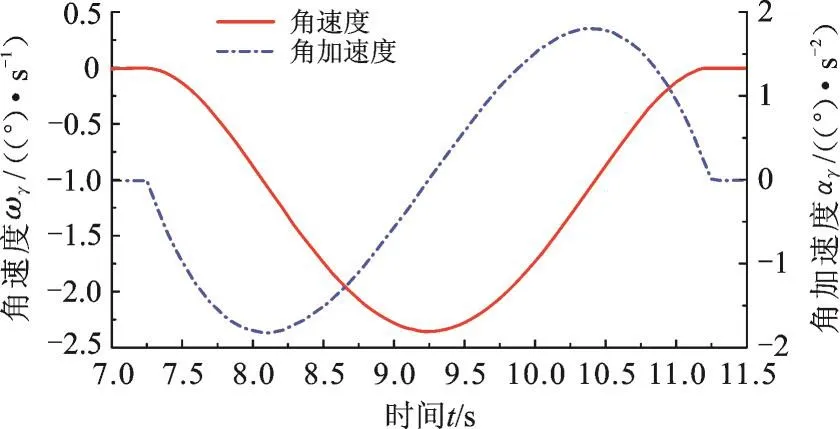
圖11 對接艙段軸線繞Z軸運動的角速度及角加速度Fig.11 The movement angular velocity and acceleration of the axis of docking cabin around Z axis
在對艙段進行位置調整時,3個方向的運動時間約束公式相同,且在Z軸方向上的調整量較大,即艙段在Z軸方向上的運動速度與加速度較大,如圖12所示,O1點在Z軸方向運動時最大加速度為10 mm/s2,滿足式(9)。
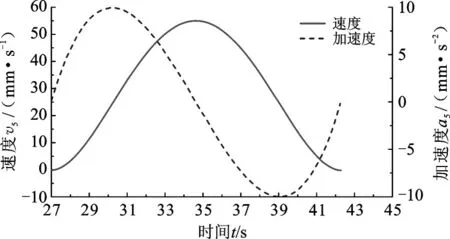
圖12 O1點在Z軸方向上的運動的速度及加速度Fig.12 The movement velocity and acceleration ofO1 in Z-axis direction
6 結論
(1)針對一類圓柱形艙段對接過程進行研究,提出了兩點定位調姿法,通過在艙段周圍布設關鍵點,在裝配空間內建立全局坐標系,在對接面圓心處建立參考坐標系,建立了艙段調姿數學模型,經仿真驗證,兩點定位調姿法具有較高的精度。
(2)采用五次多項式軌跡對艙段進行調姿軌跡規劃,經仿真驗證,艙段在姿態調整和位置調整時調姿軌跡平滑無跳動,即艙段運行平穩,加速度或角加速度滿足約束要求,且調姿時間合理。
(3)兩點定位調姿法將艙段姿態調整過程分為偏轉調姿、俯仰調姿與橫滾調姿,簡化了調姿算法,在對艙段進行姿態調整時所繞坐標軸為全局坐標軸,串聯調姿機構即可滿足調姿算法要求,避免了多軸協調控制,降低了控制難度。
[1] 郭志敏,蔣君俠,柯映林.基于POGO柱三點支撐的飛機大部件調姿方法[J].航空學報,2009,30(7):1319?1324.GUO Zhimin,JIANG Junxia,KE Yinglin.Posture Alignment for Large Aircraft Parts Based on Three POGO Sticks Distributed Support[J].Acta Aero?nautica et Astronautica Sinica,2009,30(7):1319 ?1324.
[2] PAULOS J,ECKENSTEIN N,TOSUN T,et al.Automated Self?assembly of Large Maritime Struc?tures by a Team of Robotic Boats[J].IEEE Trans?actionsonAutomationScience& Engineering,2015,12(3):958?968.
[3] 謝志江,趙萌萌.機器視覺輔助的4?PPR并聯機構工作空間分析[J].機械設計,2013,30(3):40?43.XIE Zhijiang,ZHAO Mengmeng.Workspace Analy?sis for Vision?aided 4?PPR Parallel Mechanism[J].Journal of Machine Design,2013,30(3):40?43.
[4] 楊冬,李鐵軍,劉今越,等.3?UPS/S并聯平臺結構設計與運動學分析[J].機械設計,2014,31(3):47?50.YANG Dong,LI Tiejun,LIU Jinyue,et al.Design and Kinematic Analysis of 3?UPS/S Parallel Mech?anism[J].Journal of Machine Design,2014,31(3):47?50.
[5] LI Yuan,YU Jianfeng,ZHANG Jie,et al.A Posture Evaluation Method for Aircraft Wing Based on a Simple Measurement System[J].Proceedings of the Institution of Mechanical Engineers,Part B:Journal of Engineering Manufacture,2013,227(4):627?630.
[6] 易旺民,段碧文,高峰,等.大型艙段裝配中的水平對接技術[J].計算機集成制造系統,2015,21(9):2354?2360.YI Wangmin,DUAN Biwen,GAO Feng,et al.Level Docking Technology in Large Cabin Assembly[J].Computer Integrated Manufacturing Systems,2015,21(9):2354?2360.
[7] 蔣君俠,范子春,郭志敏,等.適用于三段大部件對接的柔性裝配平臺設計與優化[J].浙江大學學報(工學版),2010,44(9):1798?1804.JIANG Junxia,FAN Zichun,GUO Zhimin,et al.De?sign and Optimization of Flexible Assembly Plat?form Used for Three Sections Joint[J].Journal of Zhejiang University(Engineering Science),2010,44(9):1798?1804.
[8] GUO Zhimin,JIANG Junxia,KE Yinglin.Stiffness of Postural Alignment System Based on 3?axis Ac?tuators for Large Aircraft Components[J].Chinese Journal of Mechanical Engineering,2010,23(4):524?531.
[9] 黃翔,陳磊,李瀧杲,等.基于3?2?1隨動式定位器的飛機部件位姿調整方法:201110401826.5[P].2012?06?27.HUANG Xiang,CHEN Lei,LI Longgao,et al.Pose Adjustment Method of Aircraft Component Based on 3?2?1 Follower Positioner:201110401826.5[P].2012?06?27.
[10] 張斌,方強,柯映林.大型剛體調姿系統最優時間軌跡規劃[J].機械工程學報,2008,44(8):248?252.ZHANG Bin,FANG Qiang,KE Yinglin.Optimal Time Trajectory Planning Method for a Kind of Posture Aligning System of Large Rigid Bodies[J].Chinese Journal of Mechanical Engineering,2008,44(8):248?252.
[11] 劉繼紅,龐英仲,鄒成.基于關鍵特征的飛機大部件對接位姿調整技術[J].計算機集成制造系統,2013,19(5):1009?1014.LIU Jihong,PANG Yingzhong,ZOU Cheng.Ad?justing Position?orientation of Large Components Based on Key Features[J].Computer Integrated Manufacturing Systems,2013,19(5):1009?1014.
[12] 朱永國,黃翔,李瀧杲,等.飛機裝配高精度測量控制網精度分析與構建準則[J].中國機械工程,2014,25(20):2699?2704.ZHU Yongguo,HUANG Xiang,LI Longgao,et al.Precision Analysis and Layout Rules of Surveying Control Network for Aircraft Assembly[J].China Mechanical Engineering,2014,25(20):2699?2704.
[13] 王少鋒,張進華,劉志剛,等.大型飛機機身壁板裝配位姿調整系統的運動規劃[J].西安交通大學學報,2011,45(3):102?106.WANG Shaofeng,ZHANG Jinhua,LIU Zhigang,et al.Motion Planning for Alignment Machine Tool Oriented Fuselage Panel[J].Journal of Xi’an Jiao?tong University,2011,45(3):102?106.
[14] 崔學良,韓先國,陳五一.大尺寸弱剛性構件對接裝配系統軌跡規劃[J].計算機集成制造系統,2011,17(5):908?914.CUI Xueliang,HAN Xianguo,CHEN Wuyi.Tra?jectory Planning for a Large Scale Weak Rigid Component Docking Assembling System[J].Com?puter Integrated Manufacturing Systems,2011,17(5):908?914.
[15] 應征,黃浦縉,王青,等.飛機大部件調姿機構柔性多體動力學建模與仿真[J].計算機集成制造系統,2012,18(11):2470?2475.YING Zheng,HUANG Pujin,WANG Qing,et al.Modeling and Simulation of Flexible Multi?body Dynamics for Large Aircraft Components Align?ment Mechanism[J].Computer Integrated Manu?facturing Systems,2012,18(11):2470?2475.
[16] 屈穩太,應蓓華,董鳳蓮.大剛體姿態計算及多軸同步協調控制技術[J].中國機械工程,2014,25(22):3050?3055.QU Wentai,YING Beihua,DONG Fenglian.Calcu?lation of Large Rigid Body Pose and Multi?axis Synchronous Coordinating Control[J].China Me?chanical Engineering,2014,25(22):3050?3055.
[17] 張斌,姚寶國,柯映林.基于鞍點規劃理論的機翼水平位姿評估方法[J].浙江大學學報(工學版),2009,43(10):1761?1765.ZHANG Bin,YAO Baoguo,KE Yinglin.Saddle Point Programming Based Level? posture Evalua?tion Method for Aircraft Wings[J].Journal of Zheji?ang University(Engineering Science),2009,43(10):1761?1765.
[18] CALUDE C S,CALUDE E,QUEEN M S.The Complexity of Euler’s Integer Partition Theorem[J].Theoretical Computer Science,2012,454:72?80.
[19] 高超.導彈柔性裝配系統關鍵技術研究[D].哈爾濱:哈爾濱工業大學,2014.GAO Chao.Research on Key Technologies of Mis?sile Flexible Assembly System[D].Harbin:Harbin Institute of Technology,2014.
[20] 郭嗣琮,劉秀華,韓建.模糊值函數的極值問題[J].系統工程理論與實踐,2014(3):738?745.GUO Sicong,LIU Xiuhua,HAN Jian.Extremal Problem of Fuzzy?valued Function[J].Systems En?gineering Theory&Practice,2014(3):738?745.*
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50