基于MATLAB的波浪補償平臺動力學分析
2018-07-04 10:56:20唐剛李慶中楊志啟胡雄
上海海事大學學報 2018年2期
關鍵詞:船舶
唐剛, 李慶中, 楊志啟, 胡雄
(上海海事大學物流工程學院,上海 201306)
0 引 言
起重機波浪補償裝置的研究是一個經典的課題。國外研究機構在波浪補償系統方面的研究最早是在“二戰”后期開始的,當時還只是停留在理論研究上,后來轉入了試驗研究,并開發了一系列具有波浪補償功能的起重機(例如T-ACS系列起重船[1])。NEUPERT 等[2]提出了一種基于起伏運動預測策略和基于反饋策略的升沉補償控制系統,并進行了仿真研究。ADAMSON等[3]針對波浪補償系統中存在的多種問題提出了不同的解決辦法。金棟平等[4]對起重裝置上的繩索進行了動力學分析,總結了在對繩索系統進行動力學建模與控制時所遇到的問題。方曉旻[5]建立了不同海況下船舶的運動模型,分析了船舶的運動規律,并分析了波浪補償裝置對起重機的影響,最終用可編程邏輯控制器(programmable logic controller, PLC)實現了對電氣控制系統的設計。李震震[6]建立了基于波浪譜激勵模型的起重機吊物的精確非線性動力學模型,實現了對物體的主動控制。電動補償控制系統[7-8]具有很好的快速響應性、適應性,是波浪補償控制中的熱點和趨勢。
目前,很多海上工作船都具備動力定位系統,這不僅使船舶的縱橫搖晃得到一定的控制,還可以把縱傾、橫傾運動轉化為升沉方向的運動,因此對船舶運動的補償就主要是升沉補償[9],但很難對船舶本身垂直方向上的升沉運動進行補償[10]。針對兩船之間的相對上升下降運動,現在的海上作業需要更高精度和可靠性且操作簡單的起重機波浪補償裝置,其中波浪補償控制系統是最核心的部分,其控制性能的好壞直接影響波浪補償的效果,因此設計具有快速響應性、適應性的電動補償控制系統具有重要意義。
1 波浪補償平臺設計
1.1 工作原理
在海上起重機作業過程中,其吊物起升與降落時,船舶本身會產生升沉方向上的運動,同時由于波浪的影響,兩船之間也會產生升沉方向上的相對運動,因此要對船舶起重過程中升沉方向上的運動進行控制補償。
許多船舶上有起重機(又稱卷揚機、絞車),起重機內部裝有一個差動行星齒輪減速器用來帶動滾筒從而提升重物,太陽輪和內齒輪為輸入端,行星架為輸出端。由行星齒輪傳動原理可知,當太陽輪與內齒輪轉向相同(相反)時,行星架轉速增加(降低)。在太陽輪的輸入控制上,船舶起重機與普通地面液壓起重機的不同體現在運動控制算法上,船舶起重機采用波浪補償控制算法。內齒輪液壓電機的輸出功率(轉動扭矩)小于太陽輪的輸入功率。當兩側電機同向驅動時,起重機轉速增加;隨著兩側電機驅動方向的改變,起重機轉速也隨之改變。根據海上情況及作業情況,由傳感器的反饋控制電機的輸出,以此控制減速器。利用這個原理改變重物的升降速度來實現波浪補償,減小作業時的晃動。[11]
在沒有風浪的情況下,內齒輪的制動器處于閉合狀態, 內齒輪不旋轉。這時減速器就是典型的NGW型行星齒輪減速器,與地面起重設備的工作情況一樣,太陽輪作為輸入端、行星架作為輸出端為起重機提供動力,以完成正常的升降工作。在波浪較大時,通過反饋調節控制內齒輪的驅動力矩,形成波浪補償系統。
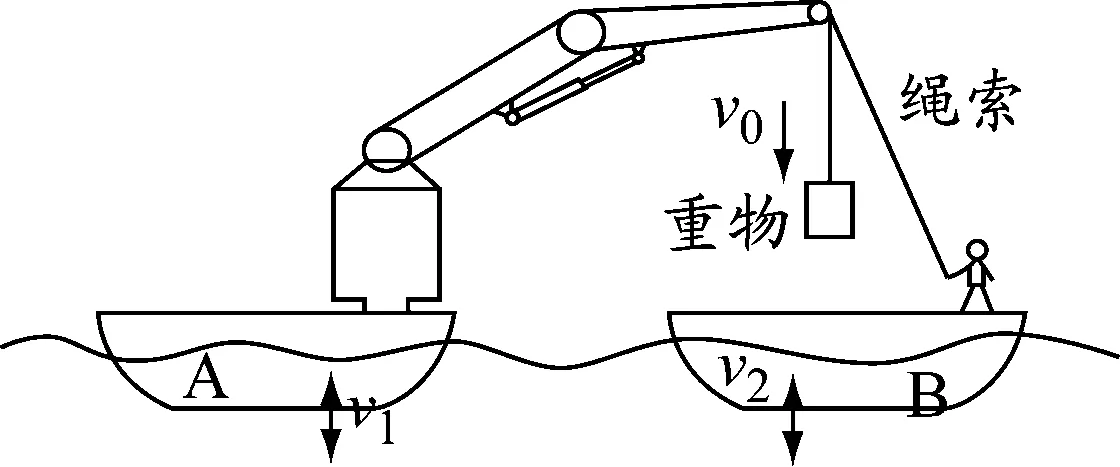
圖1 起重機升沉補償示意圖
起重機升沉補償示意圖見圖1。起重機工作時,提供給重物的垂直升降速度為vR=v0+v1-v2,其中v0為起重機收放速度,v1和v2分別為供貨船A和被供貨船B的搖擺速度在垂直方向上的分量。只要vR與v1-v2無關,重物就能穩定地從供貨船移動到被供貨船上。波浪補償就是要實現此目標。
1.2 坐標變換
1.2.1 坐標系建立和轉化

圖2 船舶慣性坐標系和隨流漂移坐標系


本文用到的慣性坐標系可以是一個真實存在的、靜止不動的坐標系,也可以是一個慢慢穩定移動的坐標系。它們對下面的運算結果沒有影響。[12-13]
1.2.2 姿態矩陣與坐標變換
為求得船舶運動,定義動坐標系O-xyz和參考坐標系O-XYZ。動坐標系O-xyz與船舶固聯,隨船體一起上下左右搖晃,其坐標原點O位于船舶重心,x軸沿船縱向并指向船的航向,y軸沿船橫向并指向船的右側邊,z軸沿船底板垂向并指向正下方。
參考坐標系O-XYZ是隨船舶以船速運動的,但是不隨船舶一起晃動,只作平動,始終位于平衡狀態。它構成了表達船舶晃動位移和姿態的基準。當船舶不晃動時兩坐標系重合,當船舶晃動時兩坐標系分開。參考坐標系O-XYZ經3次轉動后可變換為動坐標系O-xyz:O-XYZ繞Z軸轉動角度Ψ到O-X1Y1Z,O-X1Y1Z繞Y1軸轉動角度θ到O-xY1Z1,O-xY1Z1繞x軸轉動角度φ到動坐標系O-xyz。這里,Ψ、θ和φ分別為船舶的首搖角、橫搖角和縱搖角。
根據空間直角坐標系坐標變換關系,可得到3次轉動過程中的變換方程組:
(1)
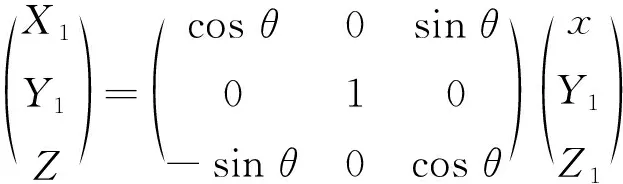
(2)
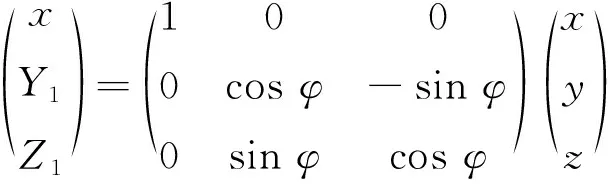
(3)
整理得
(XYZ)T=A(xyz)T
(4)
其中參考坐標系變換為動坐標系的變換矩陣

(5)
船舶陀螺儀(角速度傳感器)測量的數據為船體沿三軸向的角加速度ωx、ωy和ωz。為得到變換矩陣A,應先求得船舶運動姿態角Ψ、θ和φ。
應用剛體動力學相關知識可以得到,角速度矢量ω在動坐標系O-xyz上的投影為
(6)
解得
(7)
用典型的四階龍格庫塔法求解微分方程組(7),可得Ψ、θ和φ,進而得到A。利用式(4),可將動坐標系下的船舶運動加速度變換為參考坐標系下的船舶運動加速度,對加速度進行積分即可得到參考坐標系下船舶運動的方位速度,再次積分即可得到參考坐標系下船舶運動的位移。
2 波浪補償平臺的動力學分析
2.1 機械執行機構模型
船舶利用2K-H (NGW) 型行星齒輪減速器作為差動行星齒輪傳動系統(簡稱差動行星輪系)[14-16]。K代表中心輪,H代表行星架,2K-H即為由2個中心輪、1個太陽輪和1個行星架構成的行星齒輪傳動機構。根據傳動比將其分為正號傳動機構(在傳動比小于零和行星架固定不動時,2個中心輪的旋轉方向相同)和負號傳動機構(在傳動比大于零和行星架固定不動時,2個中心輪的旋轉方向相反)。
2.1.1 差動行星輪系調速特性
由于NGW型行星齒輪減速器的行星架并非定軸傳動,不能直接用定軸傳動的計算公式計算傳動比,但可以采用行星架固定法計算。設2個中心輪的轉速分別為na和nb,行星架的轉速為nH,太陽輪與行星架的旋轉方向相同,順時針方向為行星齒輪旋轉的正方向。當給差動行星輪系整體加一個轉速-nH(與行星架轉速大小相同、方向相反)時,行星架H的轉速為
(8)
其中u0為傳動比。因此,差動行星輪系的最高輸出轉速與最低輸出轉速之比為
(9)
2.1.2 差動行星輪系數學模型
采用集中質量模型。模型廣義坐標分別為:太陽輪的角位移為θs、第i個中心輪pi的角位移為θpi(i=1, 2)和行星架H的角位移θH。由拉格朗日第二類微分方程可導出差動行星輪系動力學微分方程:
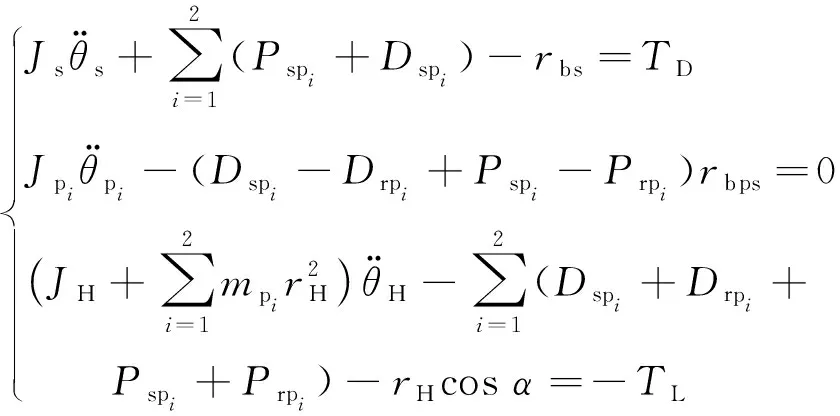
(10)
式中:Js、Jpi和JH分別為太陽輪、中心輪和行星架的轉動慣量;rbs為太陽輪齒輪的基圓半徑;rbps為中心輪基圓半徑;rH為行星架半徑;m為質量;α為齒輪副嚙合角;TD為輸入轉矩;TL為負載轉矩;D和P分別為齒輪嚙合過程中的黏性嚙合力和彈性嚙合力,下標spi表示太陽輪與中心輪的嚙合,下標rpi表示行星架與中心輪的嚙合。
2.2 伺服驅動系統模型
2.2.1 步進電機速度控制
步進電機的基本特點是將脈沖序列信號變換成軸向位置的角度增量。[17-18]當脈沖數量一定時,其轉軸轉動角度相應確定,它們之間呈線性關系。因此,可對步進電機進行開環控制。
繞組電路的基本方程為
(11)
式中:R、V1、I1、L1和μ1分別為繞組電阻、電壓、電流、自感和反電動勢。 用式(11)可以求解A、B兩個繞組電路。A相繞組的電磁轉矩為

(12)
式中:θe為機械角;kt0和ktc分別為轉矩因數和飽和因數;h3為電磁轉矩的三次諧波相對幅值。TB與TA的求解公式相同。定位轉矩為
Td=Dsin(4θe)
(13)
式中:D為定位轉矩的幅值。因此,步進電機的總轉矩為
TE=TA+TB+Td
(14)
它與外部負載轉矩TL間的動力學方程為
(15)
(16)
式中:C為黏滯阻尼系數;δ為轉子位置角;ω為轉子機械角速度;J為電機系統轉動慣量。
2.2.2 步進電機傳遞函數
步進電機的傳遞函數可以直接表示為
(17)
式中:Tr(s)為波浪補償系統給定力矩。
對于磁場控制式步進電機,電機轉矩TE與勵磁電流If的關系為
TE(s)=KmIf(s)
(18)
式中:Km為電機常數。若忽略反電動勢,則可得到磁場電壓與勵磁電流的關系為
(19)
轉矩時間常數τf=Lf/Rf,其中Rf和Lf分別為勵磁電阻和勵磁電感。因此,步進電機的傳遞函數為

(20)
3 基于MATLAB的波浪補償平臺控制仿真
PID控制就是按照給定的跟蹤軌跡誤差的比例(P)、積分(I)、微分(D)進行控制。PID控制系統原理圖見3。PID控制系統的輸入量e(t)為系統誤差,e(t)=r(t)-c(t),其中c(t)為系統的實際輸出量,r(t)為系統的給定量。系統偏差u(t)是經過PID控制系統計算后的系統輸出量,直接作用于被控對象。

圖3 PID控制系統原理圖
PID控制是一種線性控制方法,其輸出量u(t)可表達為
(21)
式中:ki為積分時間常數;kp為比例系數;kd為微分時間常數。
為對波浪補償系統進行PID控制,對式(21)進行離散化處理,得到式(22)。只有采樣周期t0足夠小,準確度才會更高。
(22)
PID控制算法有位置式和增量式兩種:位置式PID控制算法以執行機構的位置為輸出量;增量式PID控制算法以執行機構位置的增量為輸出量。由于本文波浪補償平臺仿真的執行機構是步進電機,需要輸出控制量的增量,所以選用增量式PID控制算法[19-24]。
(23)
式中:Δe(k)=e(k)-e(k-1)。
由式(20)可知,步進電機的傳遞函數為
(24)
設采樣時間為0.01 s,在用MATLAB對波浪補償平臺進行仿真分析后,得到期望軌跡:
x=1.63-0.5cos(πt/5)
y=1.8+0.5sin(πt/5)
圖4和5給出了該波浪補償系統動力學模型在PID控制下的軌跡追蹤效果及其誤差。仿真結果表明:在使用PID控制算法時,該波浪補償系統能夠迅速響應輸入的變化;使用PID控制算法控制波浪補償系統,有速度快、穩定性高和精確度高的優點。
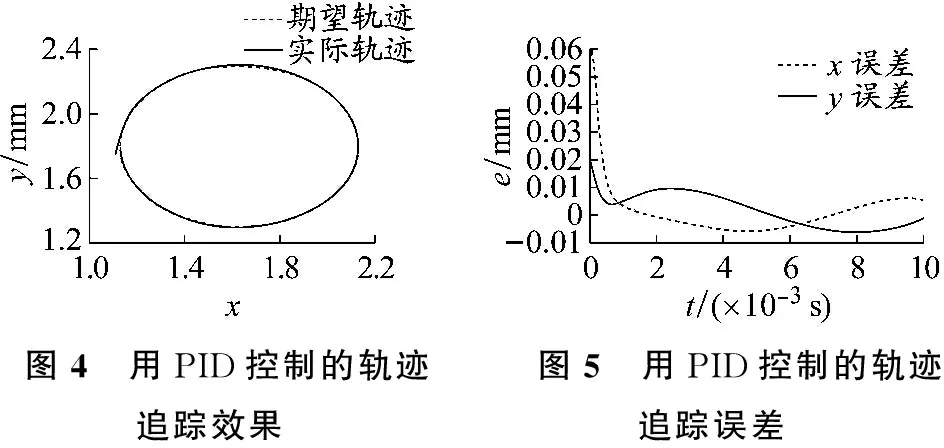
圖4 用PID控制的軌跡追蹤效果圖5 用PID控制的軌跡追蹤誤差
4 結 論
在波浪補償平臺方案設計的基礎上,設立了表現波浪補償平臺控制性能的動力學模型。選用起重機模型為該系統的機械執行機構模型,采用差動行星齒輪傳動系統實現對平臺調速的控制,利用步進電機模型模擬實現對伺服驅動系統輸入的控制,建立伺服、調速、執行的電動自動補償控制系統。利用PID控制算法對該系統進行控制,借助MATLAB進行軌跡跟蹤仿真,結果發現,PID控制系統具有良好的快速性和穩定性,能夠很好地滿足波浪補償平臺的要求。
參考文獻:
[1] MASOUD Z N. A control system for the reduction of cargo pendulation of ship-mounted cranes[D]. Blacksburg, Virginia: Virginia Polytechnic Institute and State University, 2000.
[2] NEUPERT J, MAHL T, HAESSING B,etal. A heave compensation approach for offshore cranes[C]//American Control Conference. Seattle Washington, June 11-13 2008. IEEE, 2008: 538-543.
[3] ADAMSON J E. Efficient heave motion compensation for cable-suspended systems[C/OL]//Marine Technology Society. Conference on Underwater Intervention, 2003: 1-7.
[4] 金棟平, 文浩, 胡海巖. 繩索系統的建模、動力學和控制[J]. 力學進展, 2004, 34(3): 304-313.
[5] 方曉旻. 船用起重機和波浪補償控制系統設計研究[D]. 哈爾濱: 哈爾濱工程大學, 2008.
[6] 李震震. 船用起重機吊物波浪補償控制研究[D]. 大連: 大連理工大學, 2014.
[7] 蘆紅威. 海洋工程大型起重設備及其關鍵技術研究[J]. 現代工業經濟和信息化, 2016(23): 47-48.
[8] 吳隆明. 深海作業起重機主動式升沉補償控制系統的研究與開發[D]. 廣州: 華南理工大學, 2012.
[9] 祝福, 劉曉林. 船用起重機主動式升沉補償控制的研究[J]. 船電技術, 2016, 36(4): 30-32.
[10] 陳遠明, 葉家瑋, 魏棟. 波浪運動補償穩定平臺系統的試驗研究[J]. 機床與液壓, 2008, 36(4): 67-70, 100.
[11] 孫智民, 季林紅, 沈允文. 2K-H行星齒輪傳動非線性動力學[J]. 清華大學學報(自然科學版), 2003, 43(5): 636-639. DOI: 10.16511/j.cnki.qhdxxb.2003.05.015.
[12] 齊凱. 空間六自由度位姿調整平臺運動性能研究[D]. 重慶: 重慶大學, 2016.
[13] 方喜峰, 趙若愚, 吳洪濤, 等. 6-UPS交叉桿型并聯機床的運動學正解算法[J]. 機械工程學報, 2012, 48(13): 56-60. DOI: 10.3901/JME.2012.13.056.
[14] YURT S N, ANLI E, OZKOL I. Forward kinematics analysis of the 6-3 SPM by using neural networks[J]. Meccanica, 2007, 42(2): 187-196. DOI: 10.1007/s11012-006-9037-3.
[15] 蔡黎明. 滑動軸承支撐的行星齒輪傳動系統均載特性分析研究[D]. 南京: 南京航空航天大學, 2010.
[16] 韓翔. 基于UG的2K-H行星減速器計算機輔助設計[D]. 成都: 西南交通大學, 2004.
[17] 韓利虎. 淺談步進電機的基本原理[J]. 內蒙古石油化工, 2007(11): 240.
[18] 陳志聰. 步進電機驅動控制技術及其應用設計研究[D]. 廈門: 廈門大學, 2008.
[19] 譚鵬. 橋式起重機智能防擺控制技術研究[D]. 南京: 南京航空航天大學, 2015.
[20] 侯鵬強. 基于模糊PID控制的多電機同步控制研究與實現[D]. 成都: 電子科技大學, 2010.
[21] 徐小軍, 陳循, 尚建忠, 等. 單神經元PID的波浪補償系統自適應控制與仿真[J]. 機械與電子, 2009(8): 61-64.
[22] 竇艷艷, 錢蕾, 馮金龍. 基于Matlab的模糊PID控制系統設計及仿真[J]. 電子科技, 2015, 28(2): 119-122.
[23] KUMAR V, RANA K P S. Nonlinear adaptive fractional order fuzzy PID control of a 2-link planar rigid manipulator with payload[J]. Journal of the Franklin Institute, 2017, 354(2): 993-1022.
[24] CORON J M, TAMASOIU S O. Feedback stabilization for a scalar conservation law with PID boundary control[J]. Chinese Annals of Mattematics, Series B, 2015, 36B(5): 763-776. DOI: 10.1007/s11404-015-0975-8.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30