無人機在水庫安全管理上的應用
2018-07-09 13:16:28裘一鳴
凈水技術 2018年6期
裘一鳴
(上海城投原水有限公司,上海 200949)
陳行水庫始建于1990年,兼具避咸蓄淡、避污蓄清雙重功能,是上海最早的民用水庫,也開創了上海原水“兩江并舉”的先河。陳行水庫位于長江下游羅涇段,其全貌如圖1所示,是典型的邊灘水庫,每天擔負著全上海三分之一的原水供應量。因此,陳行水庫作為一項關鍵的基礎設施,對上海的發展以及社會的安穩有著關鍵意義。根據水利部明確要求,應高度重視水庫安全管理,牢固樹立以人為本、生命至上、安全發展的理念,把確保水庫安全作為各項工作的重中之重[1-2]。
目前水庫的安全管理主要包含運行管理、日常巡視、應急預案、安全監測等多個方面,而多年來受到技術以及成本的限制,日常巡視和安全監測大都局限于水庫平面,如人員巡視、沉降監測、位移監測、滲漏監測等。近十年來,隨著水下超聲波探測技術的成熟和普及,陳行水庫又增加了水下地形動態監測手段,即利用船只搭載超聲波探測儀,對水面以下的地形進行測量,可以直觀地展現水庫庫內積泥情況以及水庫外側灘面水下河勢的發展變化情況,實現動態監測的目的,確保水庫安全。縱然如此,水庫管理中仍遇到了種種缺憾和發展瓶頸,尤其是遇到突發情況時,應急手段局限或者監控方式落后等仍然是主要問題。

圖1 陳行水庫航拍圖Fig.1 Aerial Photograph of the Chenhang Reservoir
1 無人機原理及發展前景
無人機(無人駕駛航空器,UAV)是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機[3]。從技術角度可以分為:無人直升機、無人固定翼機、無人多旋翼飛行器、無人飛艇、無人傘翼機幾大類。無人機系統由飛機平臺系統、信息采集系統和地面控制系統組成,具有結構簡單、體積小、重量輕、機動性好、飛行時間長、成本低、便于隱蔽、無需機場跑道、可多次回收重復使用等優點。隨著信息技術、電子技術、計算機技術等高新技術在航空領域的廣泛應用及現代戰爭的需要,民用無人駕駛航空器(也稱遙控駕駛航空器,簡稱無人機)的應用范圍和性能得到了不斷提高,其生產和應用在國內外得到了蓬勃發展。隨著無人機頻譜制定和試航標準等多項規范逐步落地,其在低空領域的自主性得到了大大提升,用戶學習成本下降,操作更簡單。目前,無人機已在森林防災、氣象遙感、噴灑農藥、電力巡線、地質勘探、海洋勘測、警務執法等方面有了廣泛應用,具備較為可觀的市場前景,可大大減輕人力成本和工作強度。
2 無人機的應用
目前陳行水庫安全巡檢主要采用小型無人機,其產品成熟、穩定、成本低、易于操控,同時也能進行簡單的二次開發。通過近幾年來無人機的應用,水庫的巡檢和監測從原有的平面化逐步轉為三維立體化,為水庫水域的流動趨勢分析、庫內水面及大堤外灘面巡檢、水樣采集、引水調度、藻類防控、鳥類魚類生態觀測、突發事件應急處置等多種工作提供了重要依據。
2.1 水庫水域流動趨勢分析
陳行水庫長期擔負著避咸蓄淡、避污蓄清的任務,由于供水量逐年提高,庫容小的問題尤為突出,因此如何利用好水庫有限的庫容,充分發揮水庫的稀釋作用就顯得尤為重要了。陳行水庫投產運行至今近30年,供水特點及水域流態都在發生變化,水庫的蓄水量調節主要憑著人為經驗,準確率不高。因此,通過無人機的高空多角度、多時段跟蹤拍攝(圖2、圖3),掌握水庫進水時段的水流變化情況,對更加合理地、最大限度地利用水庫庫容發揮了重要作用。

圖2 水庫進水時水流變化觀測圖(I)Fig.2 Observation Chart of Raw Water Inflow Change in the Reservoir(I)

圖3 水庫進水時水流變化觀測圖(II)Fig.3 Observation Chart of Raw Water Inflow Change in the Reservoir(II)
由圖2、圖3的流態分析可知:區域①為取水泵站開泵后長江原水新入庫的水體流向,由于長江原水含沙量偏高,水體顏色偏黃且混濁,故而與區域②內經過沉淀的原水有色差,色差較為接近的區域就是新老原水混合區域。根據上述現象,可以了解水庫在引水期間,在開啟不同數量的水泵時,庫內水體多種多樣的流態變化情況,從而為充分發揮水庫庫容,最大限度發揮水庫避污蓄清、避咸蓄淡的能力提供有力的依據。
2.2 水庫水面及大堤外灘面巡檢
陳行水庫雖然屬于小型水庫,但用船只對水面巡視,費時費力,且只能看到水庫的局部水面,難以分辨水庫水體的顏色變化。此外,大堤外灘面尤其是防浪墻外側是日常巡檢的觀測死角(圖4),若是通過長江上租船巡視,由于過于靠近邊灘,船只極易擱淺,安全性難以保證。為此,充分利用無人機的定點定時航拍功能[4],如大疆無人機的“軌跡飛行”功能或利用第三方合作軟件(如荔枝litchi航點規劃航拍軟件等),事先在程序上規劃好無人機每次飛行的路線和拍攝位置然后通過一鍵起飛,就可以讓飛機沿著規劃好的路線進行飛行和拍攝,拍攝的圖像既可以人工分析比對,也可以通過專業軟件進行后臺分析,從而及時掌握水庫內外側的變化情況,大大提高了工作效率,同時又解決了一直困擾著的巡視盲點問題。
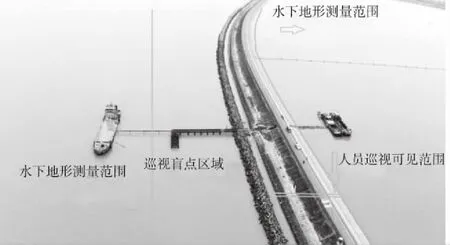
圖4 水庫巡視范圍示意圖Fig.4 Schematic Diagram of Inspection Scope of the Reservoir
如圖5所示,利用大疆無人機自帶的“軌跡飛行”模式,讓無人機按照規劃好的水面巡檢路線進行飛行,操作人員可以通過圖傳實時看到影像,對重點水域進行針對性地拍攝或錄像[5],不僅可以實時分析,還可用于后期研究。以前船只巡檢需要約2 h,而現在通過無人機巡視只需15 min就能完成,既提高了效率又降低了人員出船的安全風險。

圖5 水庫水面巡視路線示意圖Fig.5 Schematic Diagram of Inspection Scope of the Reservoir
如圖6所示,當長江低潮位時,可以清晰地看到水庫外灘面情況良好,未發現水庫有向外滲漏水的痕跡,同時也未發現長江水流沖刷給大堤帶來的安全隱患。通過對其他水庫大堤外灘面的分析(圖7),可知圓圈內部分就是水流沖刷出來的痕跡,若長江低潮位時,長時間有水流沿著該痕跡流出,則可以初步斷定,水庫大堤有滲漏水現象存在。

圖6 水庫外側灘面觀測圖Fig.6 Observation Chart of Outer Tidal Flats of the Reservoir

圖7 其他水庫外灘面觀測圖Fig.7 Observation Chart of Outer Tidal Flats of the Other Reservoir
2.3 水域水樣采集
水庫及周邊區域的水質調研工作日趨繁重,尤其是對大型河道的水樣采集,長期存在弊端,諸如采樣人員只能取到河邊水,流動性差、水樣代表性不強;若采用坐船取樣,則受限于船只較慢的航行速度和較高的成本,不適合長期且常態化的取樣工作。目前水樣采集的要求是取自水體流動性較好的區域且水面以下0.5 m層的水樣,有機玻璃采樣器自重為1 kg,含水樣后的重量約2 kg。隨著無人機的專業化發展,如經緯M 200、M 600等專業級行業應用飛行平臺完全可以加載有一定重量的設備,包括一些其他品牌的專業飛行器也都能攜帶一定的重物。在野外巡檢和考察時,對無人機進行掛載,懸吊采樣器(圖8),可以隨時進行水樣采集,方便快捷,安全高效。

圖8 水樣采集Fig.8 Water Sampling
2.4 生態觀測
陳行水庫每年都會投放一定數量的魚類,用于水庫生態治理,防止夏季藻類暴發而引起的水質事件,而水庫周邊的鳥類也是水庫的一個重要的生態系統。魚類和鳥類的大量繁殖和遷徙活動,也預示著陳行水庫是一個充滿活力、生機盎然的水域,然而人類的活動,哪怕是極其慢速的活動都會對動物造成干擾。通過無人機的飛行,能夠在不打擾魚類或者鳥類等動物的情況下,更安全地、近距離地觀測魚類和鳥類的群體活動(圖9),為后期的科學分析提供詳盡的數據基礎。

圖9 水庫鳳頭潛鴨棲息圖Fig.9 Reservoir Morillon Habitat Map
2.5 突發事件應急處置監控
陳行水庫地處長江入海口主航道的南岸,來往船只眾多,每年因船只碰撞發生數起油污染事件,對原水取水安全影響較大。傳統手段是當班人員通過望遠鏡觀察取水口情況。由于取水口距離取水泵站約600 m,根據勾股定理可知,觀察人員幾乎是平視水面,故而觀察效果不理想。因此,充分利用無人機的優勢,當油污染發生時,無人機可以懸停于取水口上方,由上往下俯視拍攝,實時發回視頻信息,了解油污帶的流動趨勢,江面取水口的水面情況一覽無余,并可以結合長江漲落潮的趨勢分析,為水庫應急搶水提供直接指導,嚴格確保取水水質的安全和可靠。如圖10所示,反光區域為油污帶。

圖10 長江突發油污帶Fig.10 Burst Oil Pollution Belt in Yangtze River
3 結語
陳行水庫的安全管理包含運行管理、日常巡視、防臺防汛、專業檢測等多個方面,目前無人機在水庫安全管理上的作用主要集中在航拍方面,它可以充分彌補人工巡檢時的不足之處;此外無人機的水質采樣功能也已成熟,正在逐步應用中。從長遠來看,隨著無人機的功能越來越強大,無人機將來可以在水庫安全管理的更多領域進行嘗試和探索[6-7],為科學地管理水庫提供強有力的理論依據和技術保障,為水庫長期地、可靠地運行奠定基礎,同時也為其他同類型水庫的管理工作提供借鑒。
[1]葉舟.水庫安全管理[M].北京:水利水電出版社,2012.
[2]方衛華.國內外水庫安全管理與大壩安全監測現狀與展望[J].水利水文自動化,2008,26(4):5-10.
[3]賀在華,段嘉宣,謝家宸,等.2018~2022年中國無人機行業深度調研及投資前景預測報告[R].2015.
[4]彭向陽,陳馳,饒章權.大型無人機電力線路巡檢作業及智能診斷技術[M].北京:中國電力出版社,2015.
[5]程遠航.無人機航空遙感圖像拼接技術研究[M].北京:清華大學出版社,2016.
[6]埃里克·程.無人機航拍從入門到精通[M].北京:人民郵電出版社,2016.
[7]符長青,曹兵.多旋翼無人機技術基礎[M].北京:清華大學出版社,2016.
