開關磁阻電機轉矩脈動及結構優化設計研究
2018-07-10 14:47:40李哲鄭玲楊威李以農任玥
電機與控制學報 2018年6期
李哲 鄭玲 楊威 李以農 任玥
摘 要:以輪轂電機為動力的四輪獨立驅動電動車是電動車未來的發展方向之一。開關磁阻(switched reluctance)電機因為輸出扭矩大,性能可靠等特點而成為較理想的驅動電機。針對SR電機輸出轉矩脈動大,影響電動汽車運行的舒適性和操縱穩定性的問題,深入分析了SR電機轉矩脈動產生的原因,提出了相應的優化設計方案,并采用粒子群算法對設計參數進行了優化。研究結果表明:經改進設計以后,在激勵電流為10 A時,SR電機的轉矩脈動減少了21.42%;在激勵電流為20 A時,轉矩脈動減少24.32%,對改善四輪獨立驅動電動汽車的舒適性和操縱穩定性具有重要意義。
關鍵詞:四輪驅動; 輪轂電機; 開關磁阻電機;轉矩脈動; 粒子群算法
中圖分類號:TM 352
文獻標志碼:A
文章編號:1007-449X(2018)06-0011-11
Abstract:Inwheel motor as the driving force of the fourwheel independent drive electric vehicle is one of the automotive industry trends. Switched reluctance (SR) motor becomes an ideal inwheel motor candidate because of the high output torque and reliable performance. However, huge output torque ripple hinders its further application. In this paper, reasons caused torque ripple in SR motor were analyzed, and corresponding improved scheme of SR motor was proposed. Moreover, design parameters of motor were optimized by particle swarm optimization algorithm. The results show that after improved design, when excitation current is 10 A, torque ripple of motor is reduced by 21.42%. And when excitation current is 20 A, a decrease of 24.32% is observed.
Keywords:fourwheel drive; inwheel motor; switched reluctance; torque ripple; particle swarm optimization
0 引 言
以輪轂電機為動力的四輪獨立驅動電動車,取消了傳統的機械傳動系統,以集成車輪上的電機為動力源,減輕了底盤質量,方便布置,并可以依靠精確的電子控制來實現性能更佳的牽引力控制(ASR),防抱死控制(ABS)及車輛的電子穩定性控制(ESP),改善車輛的行駛性能,是電動車未來的發展方向之一[1]。
由于受到供電電流諧波分量、電機的雙凸極特性、定轉子偏心、電機定轉子磁路飽和和電機控制系統測量誤差等因素的影響,四輪驅動電動汽車輸出轉矩存在一定幅度的波動[2]。且波動的轉矩直接作用在輪胎上,影響整車縱向行駛性能,造成垂向的振動問題。如果輪轂電機的轉矩波動過大,還可能導致車輛懸架前后方向的共振。開關磁阻電機具有良好的控制驅動特性,較高的電機能量密度與系統效率,較高的功率體積和功率重量比[3],成為理想的輪轂驅動電機。但相比于其他類型的驅動電機,開關磁阻電機輸出的轉矩波動問題更為突出。研究表明[4-7],驅動電機的1、2 和6 階轉矩波動是車身結構振動和車內噪聲的主要激勵源,且激勵峰值頻率分布在30~280Hz的中低頻范圍內,降低該頻率范圍輪轂電機的轉矩波動對提高車輛運行的平穩性具有重要意義。
目前,降低開關磁阻電機轉矩脈動的方法主要有兩種。一是在電機運行階段,通過控制方法優化電機的轉矩輸出曲線[8-9]。二是在電機設計階段,通過改進定子和轉子磁極結構,來獲得理想的輸出轉矩曲線。在這其中,Li[10], Emmanuel[11]采用有限元方法(FEA),分析了SR電機設計參數如定、轉子軛高,極弧,氣隙等對轉矩脈動的影響。Mohammad[12], Zhang[13]分別采用搜尋優化方法(SOA),遺傳算法(GA)以及克里格法(OK),以開關磁阻電機的設計參數為優化變量,輸出轉矩為邊界條件,輸出轉矩的脈動為優化目標,對SR電機進行了優化設計。Lee[14]研究了SR電機磁力線分布,研究了邊緣磁通對轉矩脈動的影響。Dadpour_A[15]研究了不同轉子極形狀對于SR電機轉矩脈動的影響,并進行了仿真驗證。Hur_J[16]沿著磁路方向,分別在SR電機定、轉子磁極和軛部設計真空槽,通過減小電機的徑向磁通密度,改善了SR電機轉矩脈動。Tsuyoshi[17] ,Yong_KwonChoi[18],Yusuf_Ozoglu[19]等通過改變電機第一、第二氣隙,使電機電感隨轉子位置角曲線發生變化,來改善SR電機的轉矩脈動問題。相比于第一種方法,第二種方法著眼于改進電機的原始輸出特性,能從根本上改善轉矩脈動的問題。但是目前國內外文獻僅針對原始設計參數尋優,并沒有對電機的磁路進行重新設計。
本文深入分析開關磁阻電機轉矩脈動產生的原因。從SR電機電磁設計和原始輸出特性角度出發,提出使電機矩角特性接近于理想曲線的改進電機磁路和換相切換點結構設計方案。建立SR電機的靜態、瞬態二維有限元模型。結合優化模型和粒子群算法,對主要設計參數進行優化,達到降低轉矩脈動的目的。
1 開關磁阻電機轉矩脈動分析
1.1 SR電機的轉矩輸出特性
在線性假設條件下,SR電機的輸出轉矩為
式(1)表明,SR電機的輸出轉矩正比于電機電感曲線對轉子位置角的斜率以及相電流的平方。
式(2)是繞組電感與轉子位置角的函數關系式,根據(2)得到的電感/轉子位置關系如圖1。
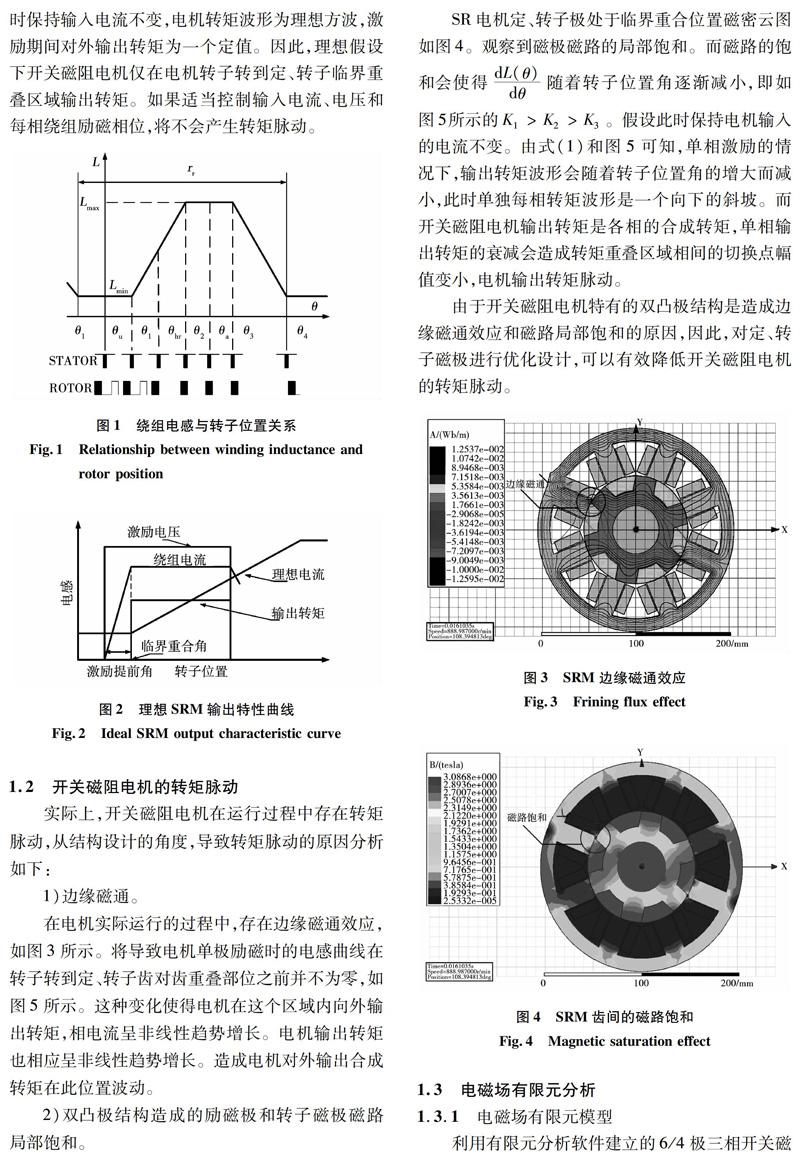
根據式(1)、式(2),理想情況下單極勵磁開關磁阻電機的輸出特性曲線如圖2所示。從圖2可知,電感在SR電機轉子轉到定、轉子臨界重疊區域之前對于電機位置角的斜率是零。相電流呈線性增長,根據式(1),在該區域內電機沒有輸出轉矩。轉子極與定子勵磁極開始接觸之后電感斜率為K,電機開始向外輸出轉矩,電感曲線的斜率不變,如果此時保持輸入電流不變,電機轉矩波形為理想方波,激勵期間對外輸出轉矩為一個定值。因此,理想假設下開關磁阻電機僅在電機轉子轉到定、轉子臨界重疊區域輸出轉矩。如果適當控制輸入電流、電壓和每相繞組勵磁相位,將不會產生轉矩脈動。
1.2 開關磁阻電機的轉矩脈動
實際上,開關磁阻電機在運行過程中存在轉矩脈動,從結構設計的角度,導致轉矩脈動的原因分析如下:
1)邊緣磁通。
在電機實際運行的過程中,存在邊緣磁通效應,如圖3所示。將導致電機單極勵磁時的電感曲線在轉子轉到定、轉子齒對齒重疊部位之前并不為零,如圖5所示。這種變化使得電機在這個區域內向外輸出轉矩,相電流呈非線性趨勢增長。電機輸出轉矩也相應呈非線性趨勢增長。造成電機對外輸出合成轉矩在此位置波動。
2)雙凸極結構造成的勵磁極和轉子磁極磁路局部飽和。
SR電機定、轉子極處于臨界重合位置磁密云圖如圖4。觀察到磁極磁路的局部飽和。而磁路的飽和會使得dL(θ)dθ隨著轉子位置角逐漸減小,即如圖5所示的K1>K2>K3。假設此時保持電機輸入的電流不變。由式(1)和圖5可知,單相激勵的情況下,輸出轉矩波形會隨著轉子位置角的增大而減小,此時單獨每相轉矩波形是一個向下的斜坡。而開關磁阻電機輸出轉矩是各相的合成轉矩,單相輸出轉矩的衰減會造成轉矩重疊區域相間的切換點幅值變小,電機輸出轉矩脈動。
由于開關磁阻電機特有的雙凸極結構是造成邊緣磁通效應和磁路局部飽和的原因,因此,對定、轉子磁極進行優化設計,可以有效降低開關磁阻電機的轉矩脈動。
1.3 電磁場有限元分析
1.3.1 電磁場有限元模型
利用有限元分析軟件建立的6/4極三相開關磁阻電機如圖7所示,電機的基本參數如圖6和表1所示。電機求解域的外邊界為磁介質與非導磁介質的分界處,施加磁通平行邊界條件。模型激勵源為定子繞組電流,采用狄里克萊邊界,假定電機無邊界漏磁,三角網格剖分。模型各部分剖分如表2所示。
1.3.2 靜態有限元分析
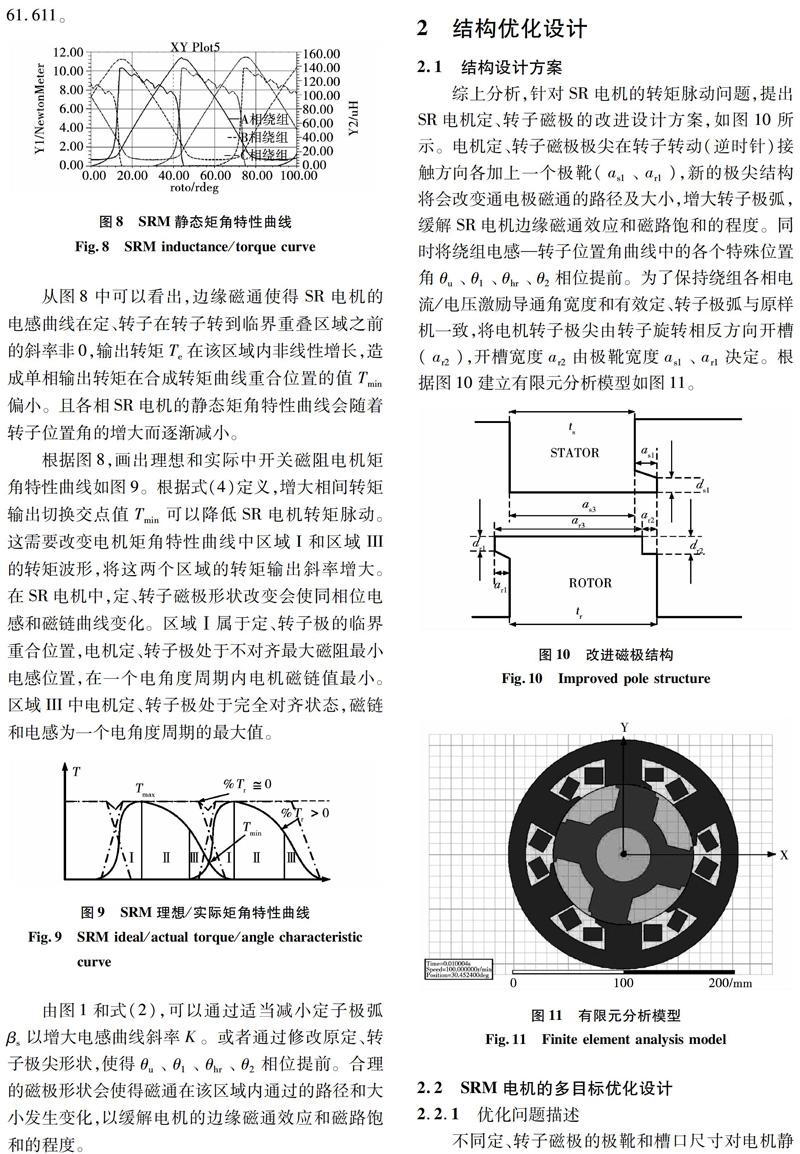
對樣機模型進行靜態有限元分析,開關磁阻電機磁路特性具有普遍性,這里僅分析單相勵磁的情況。每相繞組加載10 A的電流激勵,可以得出6/4極三相開關磁阻電機的靜態矩角特性波形和電感曲線如圖8。當轉速足夠小的時候,電機輸出轉矩的平均值為8.44 N·m,電機的轉矩脈動%Tr=61.611。
從圖8中可以看出,邊緣磁通使得SR電機的電感曲線在定、轉子在轉子轉到臨界重疊區域之前的斜率非0,輸出轉矩Te在該區域內非線性增長,造成單相輸出轉矩在合成轉矩曲線重合位置的值Tmin偏小。且各相SR電機的靜態矩角特性曲線會隨著轉子位置角的增大而逐漸減小。
根據圖8,畫出理想和實際中開關磁阻電機矩角特性曲線如圖9。根據式(4)定義,增大相間轉矩輸出切換交點值Tmin可以降低SR電機轉矩脈動。這需要改變電機矩角特性曲線中區域I和區域III的轉矩波形,將這兩個區域的轉矩輸出斜率增大。在SR電機中,定、轉子磁極形狀改變會使同相位電感和磁鏈曲線變化。區域Ⅰ屬于定、轉子極的臨界重合位置,電機定、轉子極處于不對齊最大磁阻最小電感位置,在一個電角度周期內電機磁鏈值最小。區域III中電機定、轉子極處于完全對齊狀態,磁鏈和電感為一個電角度周期的最大值。
2 結構優化設計
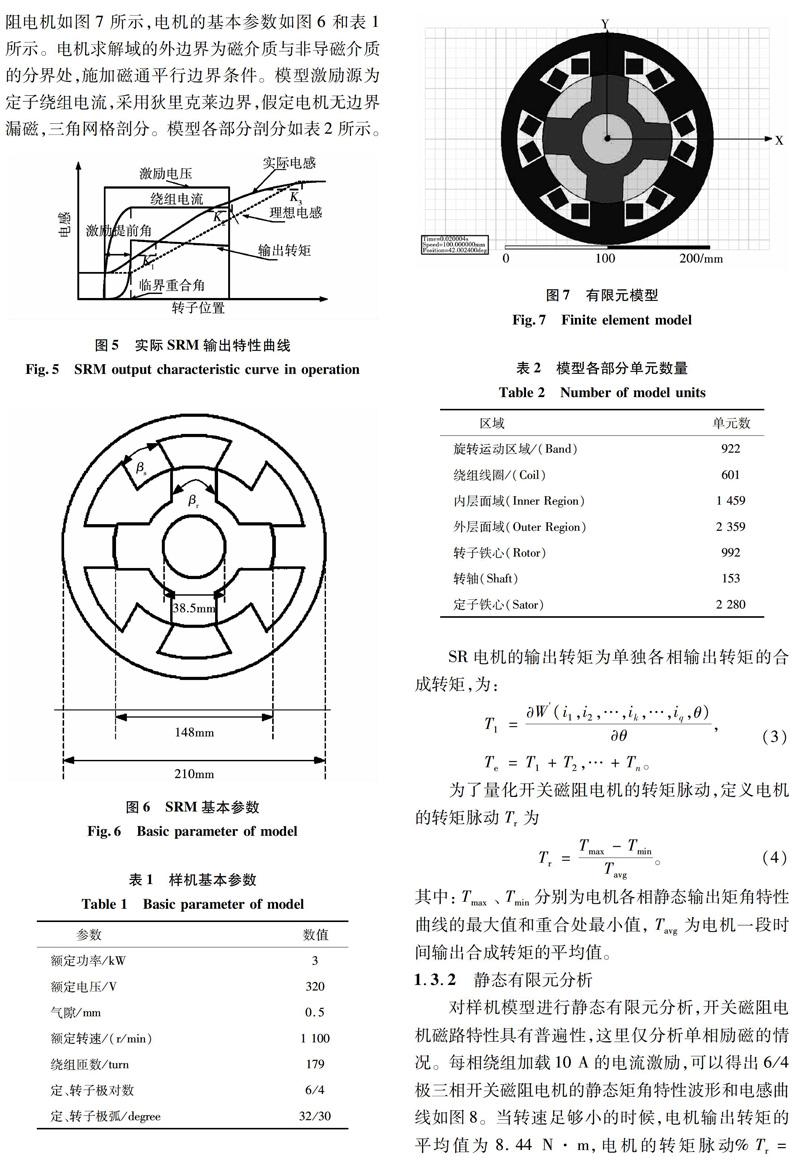
2.1 結構設計方案
2.2 SRM電機的多目標優化設計
2.2.1 優化問題描述
不同定、轉子磁極的極靴和槽口尺寸對電機靜態矩角特性曲線的影響很大,這里通過多目標優化來確定磁極極尖的基本尺寸。由開關磁阻電機數學模型可知,磁極尺寸優化實質是具有多個變量及各類約束的非線性優化問題,將磁極優化定義為一個具有m個優化目標和多個約束條件的多目標非線性優化問題
3.2 優化仿真結果對比
由表4最后一列可以看出,在10 A電流激勵的情況下,優化后轉矩脈動率Tr=13.2%,對比與原尺寸SR電機Tr=61.611%有較大的提升,ΔTr=48.411%。表5給出兩電機輸出性能對比。Ta、Tr%分別表示電機對外輸出的轉矩和轉矩脈動,ΔTa、ΔTr表示與原樣機性能對比。可以看出,在相同的電流激勵下,優化結構能有效的改善電機輸出轉矩的脈動問題,中、低幅值電流激勵的情況下平均輸出轉矩也會有所提升,大電流激勵下轉矩輸出略低于原樣機。
結構改進前后電機的電感/轉子位置角曲線如圖15所示。從圖中看出,改進后電機的電感曲線激發相位提前,比原樣機上升更早,斜率更大。修改定、轉子的極尖形狀,改變了電機的電感—轉子位置角曲線,進而改變了電機輸出的靜態轉矩曲線,使得圖9中各個特殊點的電感曲線-轉子位置角提前,SR電機的輸出轉矩的脈動降低。
進一步考察兩個樣機的矩角特性/電感曲線,如圖16和圖17。原樣機的電感曲線沿35°*2的對稱機械角度上升和下降,在上升期之前和下降的最后時刻會經歷10°*2的對稱最小電感階段。在總的90°機械角度過程中,在電感曲線35°的上升沿輸出正向轉矩,35°的下降沿輸出負向轉矩。上升、下降,正、負區域是完全對稱的。
優化設計在轉子臨界重合位置之前輸出轉矩非線性趨勢得到緩解,電感/轉子位置曲線斜率更趨近于理想電感曲線,整個轉矩輸出階段相對于原樣機更為平滑。電感曲線開始上升前和下降結束后轉過4°和9°機械角度的最小電感區域。經過40°的電感上升階段和37°的電感下降階段。電感/轉矩對轉子位置角的曲線不再左右對稱。此外,電感上升沿和下降沿的斜率并不相等。造成正、負轉矩輸出曲線之間的差異。電感曲線上升階段的斜率基本保持一致,使正向輸出力矩在整個電感上升階段幾乎保持恒定。另一方面,電感曲線的下降沿觀察負轉矩具有多峰特性和存在更高的幅值。同時,衰減也更為迅速,電機電感曲線左右不對稱。故優化磁極對矩角特性的性能提升只作用于產生正向轉矩的區域,這種結構的電機只能在單方向減小轉矩脈動。
在相同的激勵條件下,磁極優化前后開關磁阻電機轉子轉到定、轉子磁極臨界重合位置的磁力線分布分別如圖18、圖19,磁密云圖如圖20、圖21所示。可以看出,加入定、轉子極靴和轉子槽后電機的邊緣磁通效應有所緩解;臨界重合位置磁極的磁路局部飽和現象得到改善。
圖22和圖23為有限元分析下優化后的轉矩合成和三相電感曲線。對比圖8,定、轉子臨界重合位置電感波形更接近于圖2中的理想SR電機曲線。且在上升階段電感斜率并無明顯變化。優化磁極極尖對轉矩脈動的改善明顯。
3.3 瞬態磁場分析
在實際運行中, SR電機繞組通過施加恒定電壓來使各相定子磁極勵磁。在電機低速運行時,相電壓對相電流的波形影響有限,相電流可以近似看作方波。但是在電機高速運轉時,反電動勢對相電流波形影響較大,這時電機的相電流波形不再是平頂波。因此,有必要對SR電機瞬態輸出特性進行分析。
電機在基速之上運轉時,其輸出的轉矩脈動由電機輸出轉矩的高頻諧波分量決定,但是卻很容易被電機自身的轉動慣量和負載的慣量所抵消,改善SR電機轉矩脈動主要著眼于基速及以下的工況。空載額定轉速下原樣機和優化后的瞬態有限元分析輸出轉矩如圖24所示。結構優化后轉矩在瞬態場的輸出曲線更平滑,電機的轉矩脈動問題得到了改善。同時應注意,改進磁極結構犧牲了電機的部分轉矩輸出性能。
電機輸出轉矩頻域對比如圖25。采用改進磁極結構的SR電機,可同時削弱轉矩輸出的高、低次諧波。本電機是四輪獨立驅動電動汽車的輪轂電機。驅動電機的1、2和6階轉矩波動是車身結構振動和車內噪聲的主要激勵源,且激勵峰值頻率分布在30~280 Hz的中低頻范圍內。在電機實際運行中,自身的轉動慣量和負載對低頻轉矩諧波削弱效果有限。因此,中低頻率范圍內轉矩脈動的削弱,對電動汽車的縱向行駛性能和垂向舒適性改善有實際意義。
4 結 論
本文針對輪轂電機輸出轉矩脈動問題,分析了產生轉矩脈動的原因。提出了新的定、轉子極尖方案并采用多目標粒子群優化算法對極靴尺寸進行了優化,主要研究結論如下:
1)邊緣磁通效應和磁路飽和是造成其輸出轉矩脈動的重要原因。通過改進結構,改變激勵時的磁通路徑,能緩和邊緣磁通效應和磁路局部飽和。
2)采用多目標粒子群優化算法對極靴尺寸進行優化,可以有效消除SR電機臨近重合位置極尖的邊緣磁通效應和磁路飽和現象。相與相之間切換的矩角特性曲線更接近于理想輸出曲線,大幅緩解電機輸出轉矩的脈動,提升電機性能。
3)極靴尺寸優化解決了低頻范圍內的轉矩諧波在電機運行過程中難以通過自身的負載和電機自身的轉動慣量消除的問題,同時削弱了轉矩的高次諧波。為改善四輪獨立驅動電動汽車輪轂電機的垂向和縱向的行駛性能,提供了有效的技術途徑。
參 考 文 獻:
[1] 宋佑川,金國棟. 電動輪的類型與特點[J].城市公共交通,2004(4):16
SONG Youchuan, JIN Guodong. Classification and characteristics of electric wheel in newgeneration electric vehicles[J]. Urban Public Transport,2004(4):16.
[2] 李程祎, 左曙光, 段向雷. 考慮轉矩波動的電動汽車懸架 NVH 性能參數優化[J].汽車工程,2013(4):303.
LI Chenwei, ZUO Shuguang, DUAN Xianglei. Parameter optimization of the suspension nvh performance of electric vehicle with consideration of torque fluctuation[J]. Automotive Engineering,2013(4):303.
[3] 詹瓊華. 開關磁阻電動機[M].武漢: 華中理工大學出版社,1992.
[4] 孫劍波, 詹瓊華, 王雙紅, 等. 開關磁阻電機減振降噪和低轉矩脈動控制策略[J].中國電機工程學報,2008, 28(12):134.
SUN Jianbo, ZHAN Qionghua, WANG Shuanghong, et al. Control strategy of switched reluctance motor to restrain vibration, acoustic noise and torque ripple[J].Proceedings of the CSEE,2008,28(12):134.
[5] 王建, 張立軍, 余卓平, 等. 燃料電池轎車電機總成的振動階次特征分析[J].汽車工程,2009,31(3):219.
WANG Jian, ZHANG Lijun, YU Zhuoping, et al. An analysis on the vibration order feature of the electric motor assembly in a fuel cell car[J]. Automotive Engineering,2009,31(3):219.
[6] 于增亮. 輪轂電機驅動電動車懸架系統振動特性[D].上海: 同濟大學,2010.
[7] 孫劍波, 詹瓊華, 黃進. 開關磁阻電機的定子振動模態分析[J].中國電機工程學報,2005,25(22):148.
SUN Jianbo, ZHAN Qionghua, HUANG Jin. Modal analysis of stator vibration for switched reluctance motors[J]. Proceedings of the CSEE,2005,25(22):148.
[8] CAJANDER D, LEHUY H. Design and optimization of a torque controller for a switched reluctance motor drive for electric vehicles by simulation[J]. Mathematics and Computers in Simulation,2006,71(4):333.
[9] OHYAMA K, NAGUIB M, NASHED F,et al. Design using finite element analysis of a switched reluctance motor for electric vehicle[J]. Journal of Power Electronics,2006,6(2):163.
[10] LI Guangjin, OJEDA J, HLIOUI S, et al. Modification in rotor pole geometry of mutually coupled switched reluctance machine for torque ripple mitigating[J]. IEEE Transactions on Magnetics,2012,48(6):2025.
[11] SUHAIL N, SINGH R K. Analysis of variation in torque ripple in switch reluctance motor with design[C]//Power, Control and Embedded Systems (ICPCES), 2014 International Conference on. IEEE,2014:1.
[12] NAVARDI M J, BABAGHORBANI B, KETABI A.Efficiency improvement and torque ripple minimization of switched reluctance motor using FEM and seeker optimization algorithm[J]. Energy Conversion and Management,2014,78:237.
[13] ZHANG Yali, XIA Bin, XIE Di, et al. Optimum design of switched reluctance motor to minimize torque ripple using ordinary kriging model and genetic algorithm[C]//Electrical Machines and Systems (ICEMS), 2011 International Conference on. IEEE,2011:1.
[14] LEE J W, KIM H S, KWON B I, et al. New rotor shape design for minimum torque ripple of SRM using FEM[J]. IEEE Transactions on Magnetics,2004,40(2):754.
[15] DADPOUR A, ANSARI K,DIVANDARI M, et al. Conversion of shadedpole induction motor to switched reluctance motor and effects of pole shoe and notch on SRM noise[C]//Electronics and Nanotechnology (ELNANO), 2013 IEEE XXXIII International Scientific Conference. IEEE,2013:344.
[16] HUR J, KANG G H, LEE J Y, et al. Design and optimization of high torque, low ripple switched reluctance motor with flux barrier for direct drive[C]//Industry Applications Conference, 2004. 39th IAS Annual Meeting. Conference Record of the 2004 IEEE. IEEE, 2004, 1.
[17] HIGUCHI T,UEDA T, ABE T. Torque ripple reduction control of a novel segment type SRM with 2steps slide rotor[C]//Power Electronics Conference (IPEC), 2010 International. IEEE,2010:2175.
[18] CHOI Y K, YOON H S, KOH C S. Poleshape optimization of a switchedreluctance motor for torque ripple reduction[J]. IEEE Transactions on Magnetics,2007,43(4):1797.
[19] OZOGLU Y, GARIP M, MESE E. New pole tip shapes mitigating torque ripple in short pitched and fully pitched switched reluctance motors[J].Electric Power Systems Research,2005,74(1):95.
[20] 陳紹新. 多目標優化的粒子群算法及其應用研究[D].大連:大連理工大學軟件學院,2007.
[21] ALIREZA A. PSO with adaptive mutation and inertia weight and its application in parameter estimation of dynamic systems[J]. Acta Automatica Sinica,2011,37(5):541.
[22] 段曉東,王存睿,等. 粒子群算法及其應用[M].沈陽: 遼寧大學出版社,2007:98.
[23] 李麗,牛奔,等. 粒子群優化算法[M].北京: 冶金工業出版社,2009:64.
[24] ABIDO M A. Multiobjective evolutionary algorithms for electric power dispatch problem[J].IEEE Transactions on Evolutionary Computation,2006,10(3):315.
(編輯:賈志超)
