基于OpenCV和機(jī)器學(xué)習(xí)的違法停車檢測算法
2018-07-11 08:28:26譚中慧
關(guān)鍵詞:檢測
劉 海, 譚中慧
(中遠(yuǎn)海運(yùn)科技股份有限公司,上海 200135)
0 引 言
隨著城市車輛保有量的不斷增加,路邊車輛亂停放現(xiàn)象日益嚴(yán)重。近年來為消除該交通陋習(xí),我國出臺了一系列新的交通管理法規(guī),支撐了智能交通和電子警察行業(yè)的快速發(fā)展,特別是違法停車自動抓拍系統(tǒng)得以大面積推廣。
目前,違法停車自動抓拍系統(tǒng)在國內(nèi)沿海發(fā)達(dá)城市和內(nèi)地部分省會城市推廣度較高,二、三線城市仍有較大缺口。違停自動抓拍系統(tǒng)推廣主要受到以下幾方面因素的制約:
(1) 城市交通較為復(fù)雜,人、機(jī)動車及非機(jī)動車混行,自動抓拍難度較大;
(2) 傳統(tǒng)的自動抓拍算法一般采用基于灰度和紋理特性的前景、背景比對等傳統(tǒng)檢測手段,對車輛的整體認(rèn)識不夠,且極易受光線和天氣因素影響,漏拍和錯拍問題較多,抓拍率和有效率難以滿足應(yīng)用需要;
(3) 傳統(tǒng)方式兼顧面小,有的甚至采用局部小預(yù)置位輪巡方式,只能一機(jī)單用,不能滿足治安及刑偵視頻監(jiān)控復(fù)用需求。
為解決傳統(tǒng)抓拍算法的局限和不足,在傳統(tǒng)前景、背景比對算法的基礎(chǔ)上,引入基于機(jī)器學(xué)習(xí)和OpenCV的檢測抓拍算法,建立一種以傳統(tǒng)檢測算法為輔,機(jī)器學(xué)習(xí)檢測算法為主的檢測抓拍算法模型,既能很好解決復(fù)雜交通路況下目標(biāo)的鎖定抓拍問題,也能解決單一機(jī)器學(xué)習(xí)算法對遠(yuǎn)端目標(biāo)的弱視缺陷。同時(shí),通過正、負(fù)樣本訓(xùn)練得到的多級分類器,受光線、背景和目標(biāo)運(yùn)動狀態(tài)的影響小,有效提高抓拍數(shù)量和效率。此外,基于機(jī)器學(xué)習(xí)的抓拍算法支持多角度及多方向預(yù)置位輪巡抓拍,能夠滿足監(jiān)督及抓拍共用的需求。
1 基于前景、背景差分比對的傳統(tǒng)抓拍建模
基于前景、背景比對的抓拍方式需將彩色視頻圖像灰度化,再進(jìn)行背景圖像提取、背景圖片自動更新、視頻序列二值化和目標(biāo)判定等步驟完成抓拍。
采用局部背景提取和自動更新算法獲取目標(biāo)區(qū)域背景圖像。設(shè)視頻圖像分辨率為M×N,違法停車抓拍區(qū)域分別為R1、R2、…、Rn,分別計(jì)算每個(gè)區(qū)域內(nèi)單位像素的時(shí)間波動曲線σi(t)(見圖1),當(dāng)σi(t)<某一特定常數(shù)σ時(shí),表示該像素灰度值穩(wěn)定,可提取或更新當(dāng)前背景。背景提取和更新的公式為
σi(t)=|yi(t)-yi(t-1)|
(1)
(2)
式(1)和式(2)中:yi(t)和yi(t-1)分別為某像素相鄰兩時(shí)刻的灰度值;Bn(t)和Bn(t-1)分別為某一抓拍區(qū)域n相鄰時(shí)刻的背景圖像;yn(t)為抓拍區(qū)域n當(dāng)前時(shí)刻的灰度圖像。

a) 違法停車抓拍區(qū)域
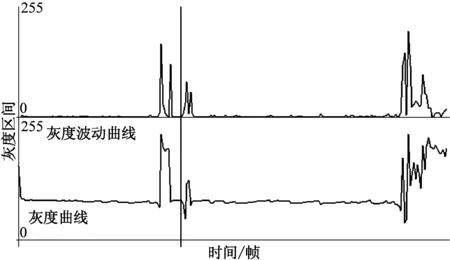
b) 單位像素灰度值時(shí)間特性
前景圖像與背景圖像相減后得到模型,并按照某一特定閾值d對幀差結(jié)果進(jìn)行歸一化,獲取目標(biāo)像素的二值數(shù)據(jù),設(shè)前景圖像像素點(diǎn)i的灰度值為Yi,背景圖像對應(yīng)位置像素點(diǎn)的灰度值為Bi,則圖像二值化函數(shù)f(i)為
(3)
視頻圖像二值化結(jié)果見圖2。
將二值化結(jié)果按照M×N大小為單位分成若干小塊,并以每小塊為單位,統(tǒng)計(jì)小塊內(nèi)二值化為1的點(diǎn)數(shù),以判定小塊內(nèi)是否有目標(biāo)。小塊內(nèi)出現(xiàn)目標(biāo),小塊計(jì)數(shù)器加1;沒有目標(biāo),小塊計(jì)數(shù)器減1。一段時(shí)間內(nèi)小塊計(jì)數(shù)器累加超過某一閾值,則表明該方格內(nèi)有目標(biāo)滯留。設(shè)第n小塊計(jì)數(shù)器為C(n),則其函數(shù)關(guān)系為
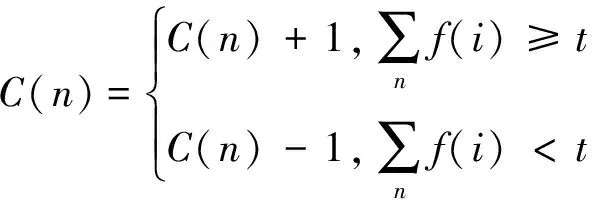
(4)

a) 實(shí)時(shí)視頻圖像
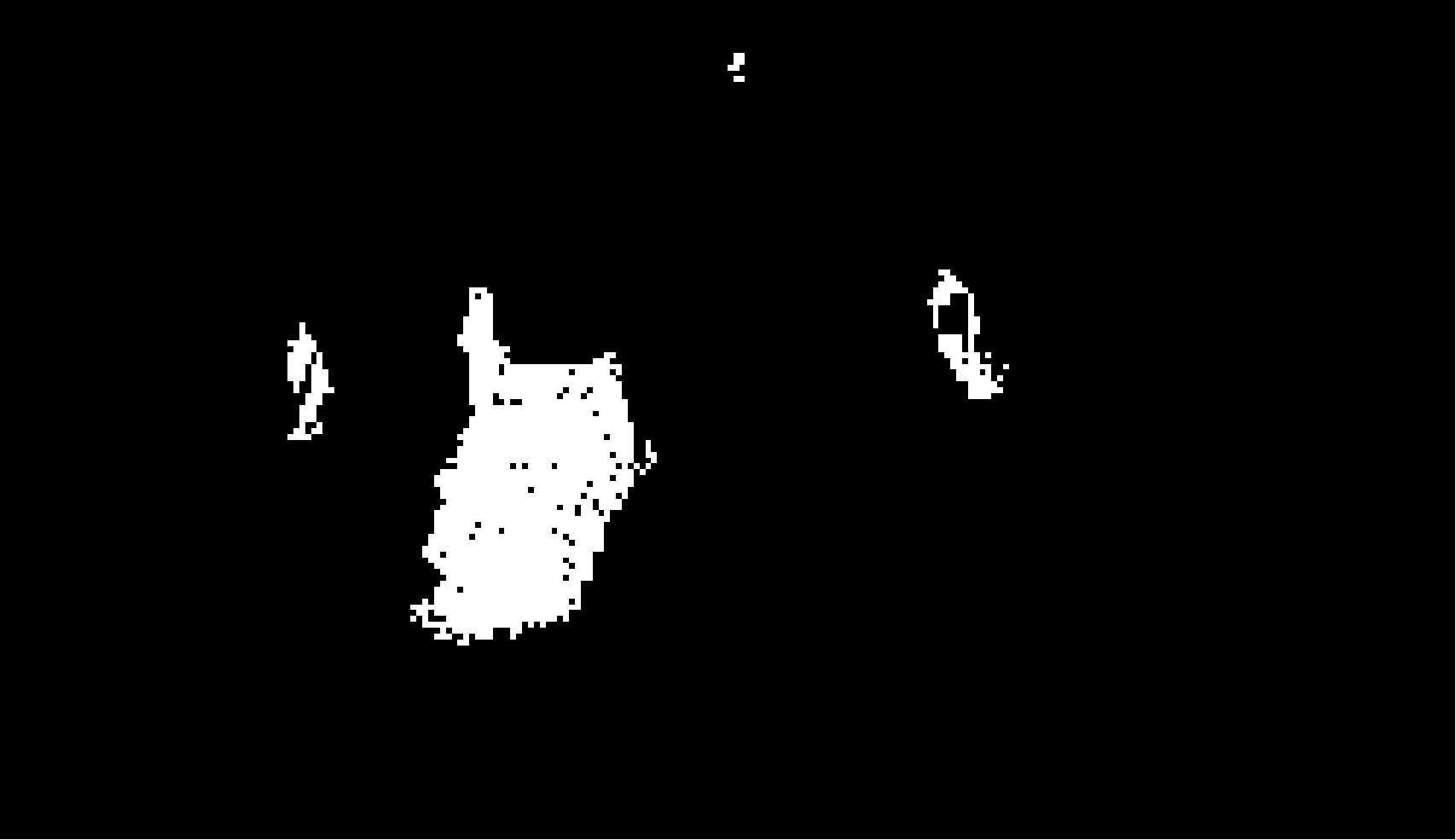
b) 視頻圖像二值化
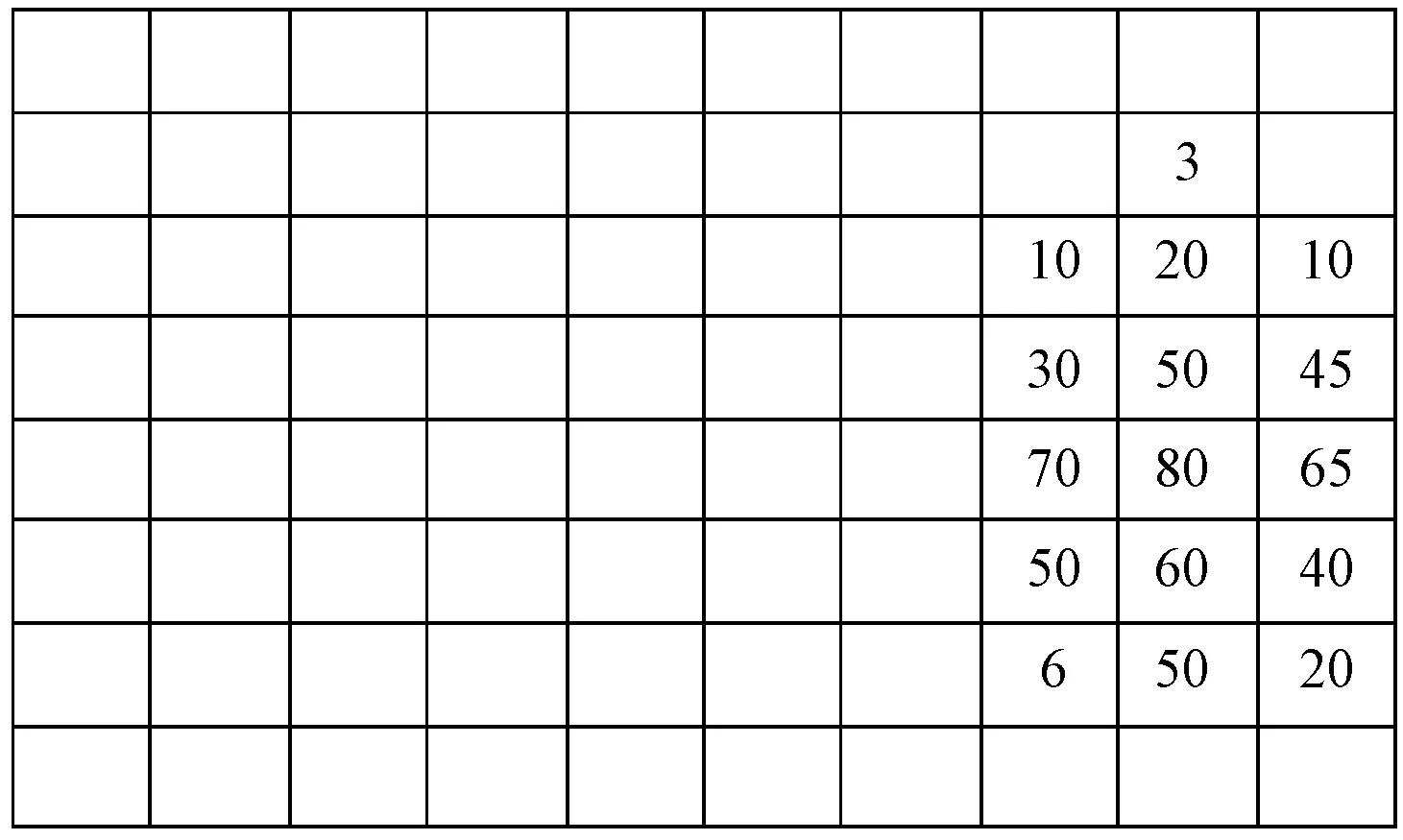
a) 目標(biāo)分塊累加計(jì)數(shù)
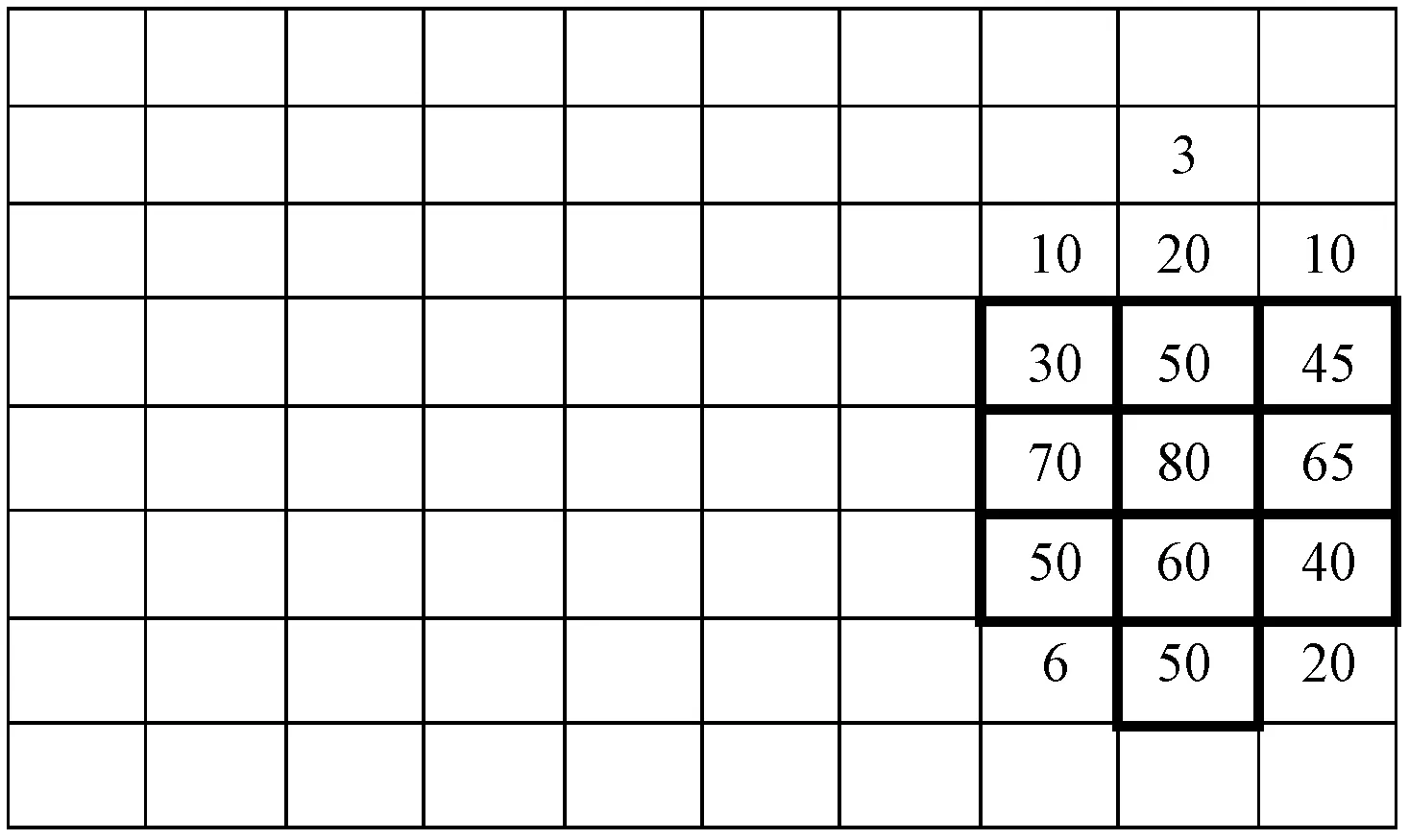
b) 目標(biāo)提取
基于前景、背景圖像和二值化的傳統(tǒng)抓拍手段在背景圖像提取、實(shí)時(shí)更新等關(guān)鍵環(huán)節(jié)仍存在較多的技術(shù)瓶頸,在城市復(fù)雜交通流條件下很難達(dá)到實(shí)用要求。同時(shí),城市道路人車混行,任何移動目標(biāo)都可能對目標(biāo)二值化處理及目標(biāo)分割造成影響,嚴(yán)重制約檢測效果。因此,傳統(tǒng)違法停車檢測算法不適合多方向及大流量城市交通違法停車的抓拍。
2 機(jī)器學(xué)習(xí)抓拍建模
為解決傳統(tǒng)算法的缺陷,在傳統(tǒng)目標(biāo)檢測的基礎(chǔ)上引入機(jī)器學(xué)習(xí)算法對車輛目標(biāo)進(jìn)行檢測,基本思想是通過機(jī)器學(xué)習(xí)的方式,模仿人類大腦認(rèn)知事物的過程,通過海量的正、負(fù)目標(biāo)樣本,并通過選擇適當(dāng)?shù)奶卣鲄?shù),建立機(jī)器學(xué)習(xí)訓(xùn)練模型,訓(xùn)練出具有明顯特征的多級分類器,并將該分類器運(yùn)用到實(shí)際檢測中,通過計(jì)算實(shí)時(shí)視頻圖像的特征參數(shù),與串聯(lián)的各級分類器進(jìn)行比對搜索,進(jìn)而進(jìn)行目標(biāo)識別。該過程能以整體為單位對目標(biāo)進(jìn)行識別,不需進(jìn)行背景圖像提取及自動更新,也無需視頻圖像二值化和目標(biāo)分割,能很好的解決傳統(tǒng)圖像處理技術(shù)瓶頸。
2.1 特征選取
Haar特征可反映圖像的灰度變化和像素分模塊的求差值,分為邊緣特征、線性特征、中心和對角線特征等,組合成特征模板見圖4。
車輛目標(biāo)相對于道路交通中其他目標(biāo)具有清晰的輪廓、線條和對稱性,因此,選用Haar特性進(jìn)行分類器訓(xùn)練。
2.2 分類器訓(xùn)練算法
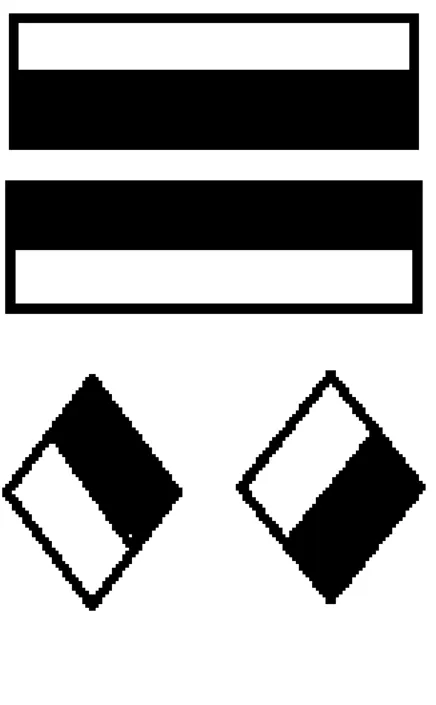
a) 邊緣特征
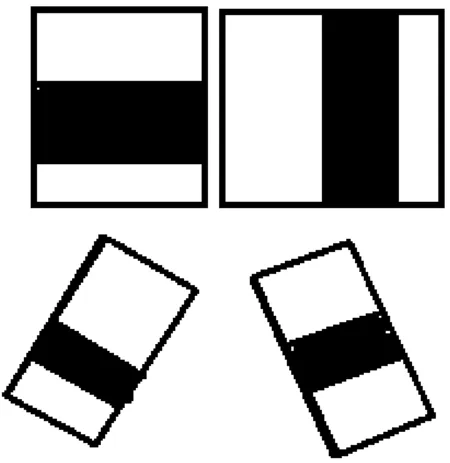
b) 線性特征
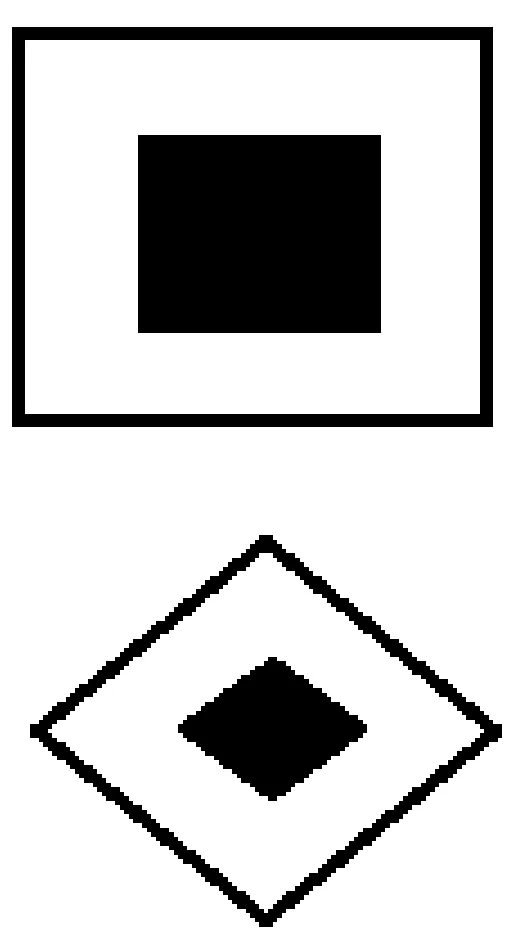
c) 中心對角特征
采用Adaboost算法進(jìn)行分類器訓(xùn)練,Adaboost是一種迭代算法,該算法的核心思想是針對同一個(gè)訓(xùn)練集中不同的分類器(弱分類器),然后把這些弱分類器集合起來,構(gòu)成一個(gè)更強(qiáng)的最終分類器(強(qiáng)分類器)。該算法本身是通過改變數(shù)據(jù)分布來實(shí)現(xiàn)的,根據(jù)每次訓(xùn)練集中每個(gè)樣本的分類是否正確及上次的總體分類的準(zhǔn)確率,來確定每個(gè)樣本的權(quán)值。將修改過權(quán)值的新數(shù)據(jù)集送給下層分類器進(jìn)行訓(xùn)練,再將每次訓(xùn)練得到的分類器進(jìn)行融合,作為最后的決策分類器。
3 基于OpenCV的Adaboost分類器訓(xùn)練及調(diào)用實(shí)現(xiàn)
OpenCV是Intel資助的開源計(jì)算機(jī)視覺庫。它由一系列C函數(shù)和少量C++類構(gòu)成,實(shí)現(xiàn)了視頻圖像處理和計(jì)算機(jī)視覺方面的很多通用算法。OpenCV包含300多個(gè)C/C++函數(shù)的跨平臺的中、高層API,不依賴于其他外部庫,可獨(dú)立于操作系統(tǒng)、硬件和圖形管理器。
分類器訓(xùn)練及調(diào)用分為樣本收集:預(yù)處理、樣本數(shù)據(jù)生成、分類器訓(xùn)練及檢測抓拍等關(guān)鍵幾步。OpenCV集成了用于Haar特征提取和Adaboost算法的全套系統(tǒng)函數(shù)及解決方案,提供用于支撐樣本數(shù)據(jù)的生成、分類器訓(xùn)練和機(jī)器視覺目標(biāo)檢測的所有接口。
3.1 樣本收集及預(yù)處理
Adaboost訓(xùn)練算法需輸入大量的正、負(fù)樣本圖片,車輛檢測中正樣本為各種車輛局部或整體圖片,負(fù)樣本為除車輛以外的其他圖片。
由于車輛頭部和尾部都由擋風(fēng)玻璃及車燈等具有明顯特征的結(jié)構(gòu)組成,Haar特征明顯,故選取車頭和車尾圖片作為正樣本。分別調(diào)用OpenCV中cvLoadImage、cvResize和cvSaveImage函數(shù),將正樣本圖片尺寸全部歸一化為25×25像素大小。
負(fù)樣本的選取多以路、路標(biāo)、行人、非機(jī)動車、行道樹及交通設(shè)施等交通相關(guān)目標(biāo)為主,尺寸不等。樣本集S計(jì)算公式為
S=P∪N
(5)
式(5)中:P為正樣本集;N為負(fù)樣本集。P和N的計(jì)算公式為
P=?(p1,p2,…,pn),pi.size=25×25
(6)
N=?(n1,n2,…,nm),ni.size=x×y
(7)
式(6)和式(7)中:pi為正樣本圖片;ni為負(fù)樣本圖片。25×25表示固定圖像分辨率,x×y表示任意圖像分辨率。樣本庫中部分訓(xùn)練樣本見圖5。
3.2 樣本數(shù)據(jù)生成
訓(xùn)練器不能直接處理采集的正、負(fù)樣本數(shù)據(jù),需根據(jù)圖片先行生成樣本數(shù)據(jù)。
負(fù)樣本相對簡單,只需要先建立負(fù)樣本文件夾(Neg),將負(fù)樣本全部存放其中,并創(chuàng)建Neg.dat描述文件,將負(fù)樣本圖片名稱分別填入Neg.dat的每一行中(見圖6a)。
正樣本放置于文件夾Pos中,建立正本描述文件Pos.dat見圖6b),調(diào)用OpenCV中的createsamples方法即可生成正樣本數(shù)據(jù)Pos.vec。
3.3 分類器訓(xùn)練
準(zhǔn)備好正、負(fù)樣本和各樣本數(shù)據(jù)后,調(diào)用OpenCV提供的分類器訓(xùn)練方法haartraining,輸入正、負(fù)樣本數(shù)據(jù)路徑、數(shù)量及尺寸,規(guī)定分類器層數(shù)等要求,進(jìn)行分類器訓(xùn)練。訓(xùn)練過程以命令形式啟動,其命令格式見圖7。

a) 正樣本

b) 負(fù)樣本
a) 負(fù)樣本描述文件
b) 正樣本描述文件

圖7 分類器訓(xùn)練過程啟動命令
圖7中,“opencv_haartraining.exe”為OpenCV訓(xùn)練函數(shù);“-data data”為訓(xùn)練完后的生成文件,最終生成data.xml分類器文件;“pos.vec”和“neg.dat”分別表示正、負(fù)樣本描述文件;270和125分別表示正、負(fù)樣本圖片數(shù)量;22表示分類器最大級聯(lián)層數(shù);“-w 25”和“-h 25”表示正樣本大小尺寸;“minHitRate”為命中率,表示正樣本通過能力,該數(shù)值越逼近1越好;“minHitRate”為“虛警率”,表示負(fù)樣本通過率,越逼近0越好;“-mode ALL”表示級聯(lián)器支持類型,默認(rèn)即可;“-mem 1000”聲明訓(xùn)練過程需申請1 000 MB內(nèi)存空間。分類器訓(xùn)練過程時(shí)間由樣本集的圖片數(shù)量決定,訓(xùn)練完成后,生成.xml文件即為最終的分類器。
3.4 停車檢測
OpenCV提供了基于xml分類器的機(jī)器學(xué)習(xí)檢測方法全套接口函數(shù),將xml分類器及目標(biāo)尺寸等參數(shù)一同輸入cvHaarDetectObjects函數(shù),即可實(shí)現(xiàn)對車輛目標(biāo)的檢測。根據(jù)函數(shù)輸出的目標(biāo)車輛數(shù)量及位置等信息,結(jié)合時(shí)間及空間特性,可實(shí)現(xiàn)違法停車檢測及抓拍。
OpenCV機(jī)器學(xué)習(xí)過程為
F(&n,&rect)=f(img,xml,*s,w,h)
(8)
式(8)中:&n為檢測輸出目標(biāo)個(gè)數(shù);&rect為目標(biāo)位置,以矩形坐標(biāo)形式輸出;輸入?yún)?shù)中img為圖像數(shù)據(jù);xml為分類器;*s為一片預(yù)分配的內(nèi)存區(qū)域,用于存儲檢測出的目標(biāo)信息;w和h分別為檢測結(jié)果中目標(biāo)的最小寬度和高度尺寸。
對檢測出的目標(biāo)車輛在時(shí)間序列上進(jìn)行時(shí)間、空間關(guān)系計(jì)算和跟蹤,判斷目標(biāo)是否具有時(shí)間連續(xù)性和空間不變性,以實(shí)現(xiàn)停車檢測。停車檢測算法公式為
(9)
3.5 對傳統(tǒng)算法的改進(jìn)
基于OpenCV和機(jī)器學(xué)習(xí)的停車檢測算法對傳統(tǒng)算法的改進(jìn)主要體現(xiàn)在算法思想、算法實(shí)現(xiàn)難易層度、算法抗干擾性和代碼的執(zhí)行效率等方面(見表1)。

表1 OpenCV及機(jī)器學(xué)習(xí)算法對傳統(tǒng)算法的改進(jìn)
傳統(tǒng)檢測算法主要分析視頻圖像的灰度變化和紋理差異,具體細(xì)分到每一個(gè)像素點(diǎn)的灰度特性,為微觀圖像處理算法,缺乏對檢測目標(biāo)的整體認(rèn)識,是一個(gè)存在非辨別性的檢測。OpenCV和機(jī)器學(xué)習(xí)的停車檢測算法則以目標(biāo)整體為檢測對象,針對目標(biāo)整體的線性特征、以角特征和邊緣特征為研究對象,通過計(jì)算圖像內(nèi)物體的特征值,并與分類器做比對,進(jìn)而區(qū)分目標(biāo)種類,實(shí)現(xiàn)可見、可辨的算法效果。
在算法實(shí)現(xiàn)過程中,傳統(tǒng)算法需要實(shí)現(xiàn)背景圖像提取及自動更新等關(guān)鍵算法,目前對于復(fù)雜交通流仍存在技術(shù)瓶頸。機(jī)器學(xué)習(xí)算法可繞開以上技術(shù)瓶頸,只需建立合適的機(jī)器學(xué)習(xí)框架機(jī)制,采集適當(dāng)數(shù)量的正、負(fù)樣本,即可訓(xùn)練準(zhǔn)確的分類器,實(shí)現(xiàn)精準(zhǔn)檢測。
基于OpenCV和機(jī)器學(xué)習(xí)的停車檢測算法能在大流量交通環(huán)境下正確識別目標(biāo),可有效解決車輛排隊(duì)及粘連等問題,同時(shí)能有效排除非機(jī)動車及行人等對目標(biāo)檢測的影響。基于OpenCV的視頻圖像處理算法采用了成熟的開源接口函數(shù),不僅加速了代碼開發(fā)速度,同時(shí)受益于OpenCV的高效性,能最大程度提高算法的執(zhí)行效率。
4 算法實(shí)驗(yàn)
以Visual C++ studio為開發(fā)環(huán)境,采用MFC程序開發(fā)框架,分別用720×576標(biāo)清視頻和1920×1080高清視頻對算法進(jìn)行了測試,測試效果見圖8。

a) 標(biāo)清視頻檢測效果

b) 高清視頻檢測效果
在上海市浦東新區(qū)沈家弄路近民生路口進(jìn)行幾種算法違法停車自動抓拍比對測試,測試環(huán)境相同,測試時(shí)長8小時(shí),測試數(shù)據(jù)見表2。

表2 違停抓拍測試數(shù)據(jù)
由測試對比可知,基于OpenCV和機(jī)器學(xué)習(xí)的違法停車檢測算法具有較好的抓拍效果和響應(yīng)速度,算法不受預(yù)置位限制,可實(shí)現(xiàn)多方位檢測,復(fù)雜路況下仍能實(shí)現(xiàn)有效的目標(biāo)分割。
5 結(jié) 語
對基于OpenCV和機(jī)器學(xué)習(xí)的車輛目標(biāo)檢測和抓拍算法進(jìn)行研究,用機(jī)器學(xué)習(xí)的方式模擬人工智能,做到目標(biāo)整體特征計(jì)算。實(shí)現(xiàn)多級分類快速識別,從根本上區(qū)別于傳統(tǒng)前景、背景比對的檢測方式,較傳統(tǒng)方式具有更好的車輛感知能力和辨別能力,具有更好的抗干擾性能。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
