轉向架構架焊縫疲勞壽命評估的等效熱點應力法*
2018-07-11 13:17:34劉建新
鐵道機車車輛 2018年3期
謝 鳴, 劉建新, 郭 峰
(西南交通大學 牽引動力國家重點實驗室, 成都 610031)
軌道車輛轉向架構架是典型的大型焊接結構,其結構失效的主要形式是焊縫的疲勞破壞。由于焊縫處所存在的應力集中效應、高殘余應力分布和潛在的焊接缺陷,其疲勞強度遠低于金屬母材,是焊接結構疲勞強度最薄弱的部位,其疲勞壽命直接決定了整個焊接結構的疲勞可靠性。
目前,針對轉向架構架焊縫疲勞可靠性評估應用較為廣泛的方法是名義應力法。名義應力法以焊縫在外載荷作用下母板表面的名義應力為基礎,結合典型焊縫的名義應力S-N曲線數據和相關的疲勞累積損傷法則對焊接結構進行疲勞壽命評估。隨著名義應力法在工程上的廣泛應用,相關學者逐漸發現該方法在對大型焊接結構進行疲勞壽命評估時精度不高[1-3],主要原因是當焊接結構的幾何形狀及承載情況比較復雜時,無論采用解析法還是有限元法,均不能界定出焊趾處嚴格的名義應力值,無法準確計算焊接結構的疲勞壽命。
針對名義應力法應用于大型焊接結構時精度不高的問題,近年來,熱點應力法逐漸被應用于轉向架構架焊縫的疲勞壽命評估[4-6]。熱點應力是指焊趾處的結構應力,該應力考慮了焊縫幾何引起的應力集中效應,比名義應力更精確的反映了焊趾處的真實應力狀態。熱點應力法是以焊縫在外載荷作用下焊趾熱點應力為基礎,結合典型焊縫的熱點應力S-N曲線數據和相關的疲勞累積損傷法則對焊接結構進行疲勞壽命評估。目前熱點應力法根據焊趾熱點應力計算方法的不同分為表面外推熱點應力法和厚度方向積分熱點應力法[7]。表面外推熱點應力法是通過取母板表面距焊趾一定距離的若干參考點的應力值并根據相關經驗公式來計算焊趾的熱點應力,其焊趾應力的計算結果對網格質量比較敏感,在實際應用時局限于外推點的選取,并且對焊趾附近的網格質量要求較高[8-9];厚度方向積分熱點應力法是根據焊趾截面力矩等效平衡原則和結構力學理論,采用數值積分方法計算焊趾的熱點應力,其焊趾應力計算結果精度較高,但是計算過程相對復雜,計算耗時較長,應用于實際工程結構時效率較低,在實際工程計算中應用較少。
等效熱點應力法是由大連理工大學學者劉剛、黃如旭等[10]提出的針對船舶與海洋工程中的復雜焊接結構疲勞壽命評估的一種新算法,在小試件上取得了與疲勞試驗較吻合的結果,并已經逐步推廣到多軸疲勞領域[11-12],該方法計算簡單,效率高,應用范圍廣,具有較好的工程應用價值。文中將該方法應用到某高速轉向架構架上,研究其在大型焊接結構上的應用特點。
1 等效熱點應力法的原理和計算方法
1.1 等效熱點應力法
焊接結構在焊趾處存在幾何突變,由此產生的應力集中現象導致服役焊接結構在焊趾處應力分布復雜,典型的應力分布如圖1所示。國內外學者[13-14]通常將焊趾應力按照分布趨勢分為線性部分和非線性部分。線性部分包括母板表面的膜應力以及沿母板厚度方向分布的彎曲應力,此部分應力可通過數值積分方法計算;非線性部分包括局部非線性應力,其分布比較復雜,無法精確計算。局部非線性應力是由焊趾缺口引起的處于自平衡狀態[14]的特殊應力。目前,不管是采用表面外推熱點應力法還是厚度方向積分熱點應力法計算焊趾的熱點應力,都旨在避開局部非線性應力對焊趾應力計算的影響。由于局部非線性應力沿母板厚度方向處于一種自平衡狀態,如圖1所示,故在焊趾正下方一定厚度的某一點,局部非線性應力值必然為零,該點處的總體應力僅包含相應的膜應力和彎曲應力,即結構應力,該點也被稱為零點,參考圖1中的標識。
基于零點應力的特殊性,定義零點的結構應力為焊趾的等效熱點應力,這樣就可以直接規避局部非線性應力的影響而獲得焊趾的熱點應力,是一種沿母板厚度方向求解焊趾熱點應力的新算法。等效熱點應力法即以焊縫在外載荷作用下焊趾處的等效熱點應力為基礎,結合典型焊縫的熱點應力S-N曲線和相關疲勞累積損傷理論來計算焊縫的疲勞壽命。

圖1 焊趾截面應力分布和等效熱點應力法原理
1.2 零點位置的計算
等效熱點應力法應用于大型焊接結構,焊縫疲勞壽命評估的關鍵是確定焊縫的零點位置。劉剛等在提出等效熱點應力法的基礎上,通過大量仿真和試驗后,提出了適合工程應用的用于確定零點位置的擬合方程,擬
合方程見式(1)。該方程繼承了傳統熱點應力法在計算焊縫疲勞壽命時不考慮焊縫具體幾何尺寸的特點,僅考慮了載荷形式對零點位置的影響,通過確定不同載荷形式對應的不同拉伸應力比參數R和板厚t便可計算得到零點的位置d。其中拉伸應力比R是用焊趾表面名義拉應力σT和名義彎曲應力σB之間的關系式來確定的用于表示不同載荷形式對零點位置影響的參數,其表達式見式(2)。
d/t=0.062R+0.066
(1)
R=σT/(σT+σB)
(2)
1.3 等效熱點應力法的計算方法
等效熱點應力法通常結合有限元方法一起應用于焊接結構中焊縫的疲勞壽命評估。由于小試件本身結構簡單,其有限元模型的創建過程比較容易,且能很方便的對焊縫局部的網格進行加密,所以在小試件上應用等效熱點應力法一般是先加密焊縫局部的網格,然后根據零點的計算位置選擇最精確的1個節點作為零點節點,從有限元仿真求解結果中獲取零點的應力數據進而對相應焊縫的疲勞壽命進行分析。對小試件而言,其載荷工況單一,零點的計算過程相對簡單。
對于大型焊接結構而言,由于其本身的結構復雜,部件之間的幾何組成關系使得在創建有限元模型時必須考慮部件之間的連接關系,工作量較大,最重要的是無法忽略部件間的聯系而僅對焊縫局部網格進行加密,所以在大型焊接結構上應用等效熱點應力法需要采用子模型技術,將焊縫局部的網格從整體有限元模型中分離出來,根據零點位置的計算結果,在子模型相應的位置上添加零點節點,在有限元仿真求解后提取零點應力數據,最后根據標準提供的焊縫疲勞試驗數據和相關疲勞損傷法則計算焊縫的疲勞壽命。大型焊接結構的承載工況比較復雜,采用材料力學的方法計算關鍵焊縫在組合載荷作用下的零點位置時,計算量相對較大。
采用等效熱點應力法分析大型焊接結構上焊縫的疲勞壽命時,有如圖2所示的技術路線:

圖2 等效熱點應力法應用于大型焊接結構的技術路線圖
2 關鍵焊縫的有限元模型
2.1 轉向架有限元模型和關鍵焊縫的選取
文中選擇某高速轉向架焊接構架為研究對象,以8節點六面體單元為主和4節點四面體單元為輔建立了轉向架帶焊縫有限元模型,一共包含573 755個實體單元,772 870個節點。疲勞載荷按照EN 13749[15]標準中推薦的3段式準靜態載荷加載,載荷總循環次數為107次,載荷工況和約束條件的加載方案如圖3所示,其中紅色箭頭代表載荷,綠色箭頭代表添加3個方向的約束。
通過對高速轉向架焊接構架進行準靜態載荷下的疲勞強度分析,并根據分析結果選擇了應力相對較高且位于構架重要承載結構上的4條焊縫,進一步采用等效熱點應力法對其進行疲勞壽命的分析。圖4為焊縫的局部示意,4條焊縫所在位置分別為:焊縫A位于電機懸掛安裝座與橫梁側壁連接處,焊縫B位于電機吊耳安裝座與橫梁頂板連接處,焊縫C位于牽引拉桿安裝座與橫梁頂板連接處,焊縫D位于轉臂定位裝置安裝座與構架側梁頂板連接處。

圖3 轉向架構架邊界條件加載示意圖
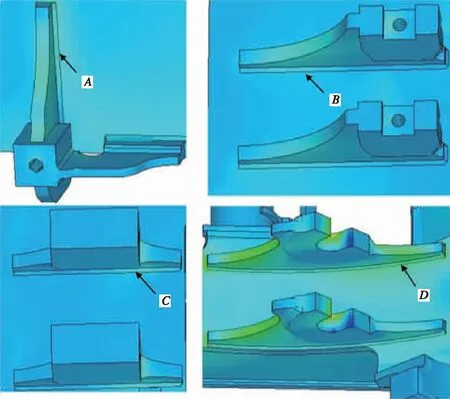
圖4 關鍵焊縫的局部示意圖
2.2 關鍵焊縫的子模型
在有限元仿真技術的基礎上運用等效熱點應力法對轉向架構架上的關鍵焊縫進行疲勞壽命計算,需要采用子模型技術進一步對關鍵焊縫重新劃分帶零點節點的有限元模型,以獲得有限元仿真求解后零點位置的應力結果。
子模型技術是基于圣維南原理,在整體有限元模型的分析基礎上獲得局部結構更為精確結果的一種有限元方法[16],主要用于對復雜結構進行局部結構的精細研究和優化設計。子模型技術主要是通過將需要單獨研究的局部結構從整體模型中沿一定的邊界切割出來,被切割出來的部分將繼承邊界上的位移作為自身的邊界條件成為獨立的子模型,子模型可以根據不同的研究需求對其進行重新劃分網格然后再進行有限元仿真求解。
根據圖2所示的技術路線,建立關鍵焊縫基于等效熱點應力法的子模型,需要先確定零點位置。根據不同焊縫的承載情況,采用材料力學公式計算焊趾表面的名義拉應力σT和名義彎曲應力σB,并根據式(1)和式(2)計算出焊縫的拉伸應力比R和焊趾截面的平均零點位置d,4條關鍵焊縫的零點位置計算結果見表1。根據零點位置的計算結果,采用子模型技術在每條焊縫的母板厚度方向上布置零點節點,創建基于等效熱點應力法的子模型,圖5為焊縫A和焊縫C通過重新劃分網格后的零點子模型示意圖。
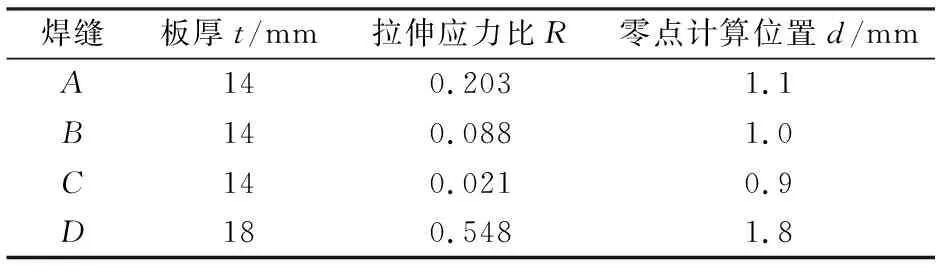
表1 關鍵焊縫零點的計算位置

圖5 焊縫A和C基于等效熱點 應力法的子模型
3 結果分析
3.1 焊趾節點應力分析
取4條焊縫焊趾上等距分布的若干節點,分別采用等效熱點應力法和厚度方向積分熱點應力法計算目標節點在準靜態載荷下的應力,兩種方法的節點應力值計算結果如圖6所示,其中縱坐標表示焊趾上等距分布節點的應力值,橫坐標表示目標節點在焊趾上的相應位置。
厚度方向積分熱點應力法是以結構力學理論為基礎,通過嚴格的數值積分公式計算焊趾熱點應力,其應力計算結果精度較高。從圖6可以看出,采用等效熱點應力法計算4條關鍵焊縫上焊趾節點的應力值沿焊縫長度方向的分布與厚度方向積分熱點應力法的計算結果具有較好的一致性,說明等效熱點法的焊趾應力計算結果能準確反映焊趾上應力集中的趨勢,并且兩種方法的曲線整體上比較貼合,說明等效熱點應力法作為一種沿母板厚度方向計算焊趾熱點應力的新算法,其焊趾應力的計算結果具有可信度。

圖6 焊趾節點應力計算值對比圖
3.2 焊縫疲勞損傷和疲勞壽命分析
根據焊趾節點應力計算結果,基于最新版BS 7608標準[7]更新的熱點應力S-N曲線,并結合線性疲勞累積損傷法則進一步計算4條焊縫的疲勞損傷,并選擇焊縫上疲勞損傷最大的點計算焊縫的最短疲勞壽命,焊縫疲勞累積損傷計算結果如圖7所示,焊縫疲勞壽命計算結果見表2,其中疲勞壽命以循環次數表示。
分析圖7可知,采用等效熱點應力法計算焊縫的疲勞損傷沿焊縫長度方向的分布趨勢與厚度方向積分熱點應力法的結果具有較好的一致性,均準確反映了焊縫長度方向疲勞損傷的分布情況,并且兩種方法都是在相同節點位置達到疲勞損傷最大值,結果比較接近。
從表2可以看出采用等效熱點應力法計算的焊縫疲勞壽命與厚度方向積分熱點應力法的計算結果最大相差6%,充分說明基于子模型技術的等效熱點應力法可以很好的應用于大型焊接結構的焊縫疲勞壽命分析。
采用厚度方向積分熱點應力法計算焊趾節點時,計算過程比較繁瑣,所需時間較長,尤其當母板厚度方向單元層數較多時,計算量巨大。文中所選焊縫的母板厚度方向上都是4層單元,采用厚度方向積分熱點應力法時需要在特定位置取每一列五個節點的應力數據并根據積分公式計算焊趾的應力,其后處理時間是等效熱點應力法的2倍多,效率太低,當需要對局部結構網格加密進行精確分析時,采用該方法需要的計算代價太高,這也是厚度方向積分熱點應力法在工程應用中應用較少的主要原因。等效熱點應力法克服了厚度方向積分熱點應力法的缺陷,在結果相近的情況下,等效熱點應力法的計算不受母板厚度上單元層數的影響,避免了厚度積分熱點應力法繁瑣的計算過程,結合有限元仿真技術能夠快速求解焊趾熱點應力,應用于轉向架構架疲勞壽命評估時計算效率更高。
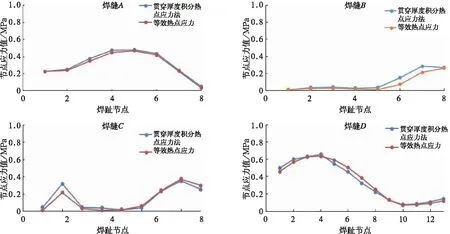
圖7 焊縫疲勞損傷計算結果對比圖
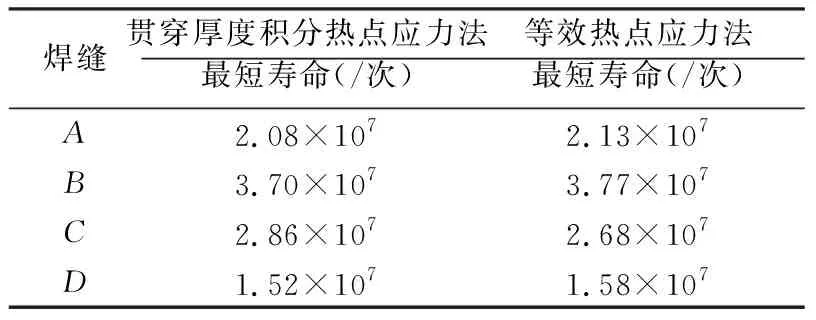
焊縫貫穿厚度積分熱點應力法等效熱點應力法最短壽命(/次)最短壽命(/次)A 2.08×107 2.13×107B 3.70×107 3.77×107C 2.86×107 2.68×107D1.52×107 1.58×107
4 結 論
(1)通過將等效熱點應力法應用于高速轉向架構架焊縫的疲勞壽命評估上,按照文中的技術路線對高速轉向架構架上的4條關鍵焊縫進行了疲勞壽命分析,并從焊趾節點應力、焊縫疲勞損傷、焊縫疲勞壽命3個方面獲得了與厚度方向積分熱點應力法比較一致的計算結果,說明等效熱點應力法作為一種新的熱點應力算法,可以很好的應用于轉向架的疲勞壽命評估。
(2)通過與厚度方向積分熱點應力法比較,等效熱點應力法在計算高速轉向架構架上關鍵焊縫疲勞壽命時具有計算簡單,效率高的特點,適合應用于大型焊接結構的疲勞壽命評估和結構設計。
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:08
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造技術與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
制造業自動化(2017年2期)2017-03-20 14:26:13
鐵道運營技術(2015年3期)2015-12-23 09:27:14
設備管理與維修(2015年12期)2015-04-09 06:57:24
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24