電梯制動力預警的方法研究
2018-07-11 02:28:26王寅凱高常進
中國特種設備安全 2018年6期
關鍵詞:電梯
王寅凱 高常進
(天津市特種設備監督檢驗技術研究院 天津 300192)
截至2016年底全國注冊登記的電梯數量高達493.69萬臺[1],占全球在用電梯的30%。天津全市注冊登記的在用電梯數量也超過了8萬余臺,可以說人們的日常生活離不開電梯這種重要的垂直型交通工具。電梯作為八大類特種設備之一,其使用安全性得到了老百姓的普遍關注,與電梯相關的事件也涉及社會的和諧穩定。
根據國家質量監督檢驗檢疫總局特種設備事故調查處理中心組織編寫的《特種設備典型事故案例集》[2],總結選取電梯方面的近400個典型案例,其中有關垂直電梯300余起。在這些案例中,非人為因素導致的電梯事故共173起,占比55.4%,較為典型并且多發事故即為轎廂意外移動導致的剪切、沖頂或蹲底。
根據相關參考文獻[3],按發生事故的系統位置將電梯事故的種類分為門系統事故(占80%左右)、沖頂或蹲底事故(15%)、其他事故(5%)。在這里需要解釋說明的是,這里說的門系統事故既包含了人為非安全使用導致的門系統事故,又包含由于開關門功能失效導致的停梯事故,還包括了門口處轎廂意外移動導致的剪切。
另外,根據現場檢驗與歷史經驗,可以發現,排除不安全使用電梯和人為故意破壞電梯外,由于層門轎門的頻繁開啟特性與人為接觸的固有屬性,導致門系統事故的發生頻率最高,但危害程度較小。但由轎廂意外移動導致的剪切、沖頂或蹲底事故所產生的危害程度最大,因此有必要以此為研究對象。
導致轎廂意外移動的原因可能很多,但由于同步機制動力不足而引起的轎廂意外移動是一個重要的不容忽視的原因(以下均以同步機為研究對象),轎廂的意外移動很大可能會產生剪切,甚至是沖頂或蹲底。所以有必要對制動力進行有效的數字化監測,并配合設置合理的閾值,對制動力進行預警。
1 制動器工作原理
電梯的制動器是曳引機的重要部件,在電梯正常的啟動和停止過程,制動器進行相應的打開或者關閉動作。制動器的制動力與曳引機的驅動扭矩互相配合,在啟動和停止過程中,使曳引機處于“零速”狀態[4]。在此狀態下,制動器的作用類似于汽車的駐車制動器(即汽車手剎),用于在車輛停穩后穩定車輛。在遇到緊急情況時,電梯曳引機和制動器斷電,制動器抱緊曳引輪,使轎廂減速直至停止。此時的制動器功能類似于汽車的剎車系統,在行進過程中進行減速或者緊急制停。可以說制動器對于電梯的意義就如同剎車系統對于汽車一樣,是最為重要的安全部件之一。
電梯制動器通電時,線圈得電,動鐵芯克服制動彈簧作用力,使制動閘皮遠離曳引輪;斷電時,線圈失電,制動彈簧釋放彈性勢能,推動制動閘皮抱緊曳引輪實現制動[5]。即制動器在制動過程中處于斷電狀態,這對于直接監測制動器制動狀態有很大的難度。
另外,制動器形式多樣,空間結構緊湊,制動氣隙微小,通過外置增加傳感器的方式監測制動器,無論是在普適性上還是在準確性和可靠性上都有較大的不確定性。因此有必要對電梯的重要部件——制動器進行深入探索,提出一種普適性強的制動力預警方法。
2 制動力預警原理
在首先保證不影響乘客乘梯的情況下,電梯控制系統進入制動力預警模式,不再響應外呼和內選,以確保制動力試驗的測試連續性和乘客的安全性。
電梯轎廂駛入預先設定的轎廂與對重相平的位置,用于減小鋼絲繩和補償裝置(如果有)對測試結果的影響。
制動力預警試驗開始后,制動器不執行上電打開抱閘的動作,完全由制動彈簧作用于曳引輪,提供制動力。在此情況下,設定初始轉矩值(較小的轉矩值),變頻器在此扭矩下驅動曳引機旋轉,若與曳引機同軸的編碼器旋轉輸出脈沖數超出設定值,則輸出此時轉矩值;若未發生旋轉,則按照一定的規律逐漸增大轉矩值,直至曳引機發生旋轉。
轉矩值的增大過程可按照線性的形式逐步增大(例如轉矩隨時間線性增加)。為縮短計算過程,亦可選擇二分法進行試驗,即初始時在最小轉矩設定值和最大轉矩設定值之間選擇一個中間扭矩作為給定驅動扭矩,不斷通過尋找中間值的方法,以縮小范圍快速確定曳引機扭矩所處的范圍。
上述方法所獲得扭矩值實為所施加的曳引機驅動扭矩值,由于轎廂和對重存在重量差,電梯制動器在進行制動力試驗時不但需要克服驅動扭矩,還需要克服由轎廂和對重存在重量差所引起的不平衡扭矩差。由于驅動扭矩的施加方向不同,導致制動扭矩計算方式也不同。
當驅動扭矩的施加方向與不平衡扭矩的方向相同時(即朝對重向下運行的方向),上述驅動扭矩值為最小(不影響設備安全)。出于對變頻器超載保護的考慮,選取此時的驅動扭矩值以及重量差引起的不平衡扭矩差值作為計算電梯當前的制動扭矩值的依據。配合設定的閾值范圍,利用該數據評判曳引機制動器的健康狀況。
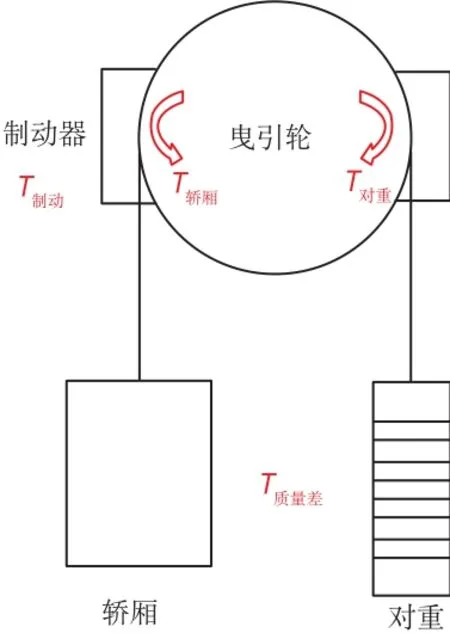
圖1 電梯轎廂與對重相平的位置
定義如下變量:
T對重:在抱閘制動器處于抱緊曳引輪狀態下,曳引機強制驅動使對重朝向下方向運行時的臨界驅動扭矩,即恰好是曳引機超過旋轉脈沖時的最小驅動扭矩(N·m);
T制動:制動器提供的制動扭矩(N·m);
T質量差:由于對重和轎廂重量差而引起的不平衡扭矩(N·m),與平衡系數有關;
通過曳引機強制驅動,在制動器抱緊曳引輪的情況下,建立系統轉矩平衡方程:
T對重+T質量差=T制動。
根據T對重和T質量差,即可以間接計算出T制動。但需要考慮解決三個方面的內容:電梯控制系統如何快速準確地獲取T對重,如何根據平衡系數求解T質量差,以及如何確定危險閾值,用于判斷求得的T制動現在處于何種狀態。
3 制動力預警實施步驟
定義電梯如下參數:
額定扭矩:T(N·m)
額定載重量:Q(kg)
額定電流:I(A)
額定功率:P(kW)
轎廂自重:G(kg)
對重自重:W(kg)
電梯平衡系數:K
鋼絲繩倍率:a
曳引輪節圓直徑:D(m)
減速器傳動比:b
傳動系統總機械效率:η
制動器第一預警值:T1
制動器第二預警值:T2
在永磁同步電機中,定義減速器傳動比:b=1,傳動系統總機械效率:η=1
制動器預警試驗整體步驟見圖2。
1)選擇在電梯交通流量低的時間段,通過電梯內置程序的方式,確認電梯轎廂內沒有乘客,電梯制動力預警試驗開始。否則,不能進行此預警試驗。
2)電梯制動力預警試驗開始后,關閉并持續鎖緊轎門,不再響應電梯的內選與外呼操作,避免干擾測試。對等梯乘客給予必要的提示。
3)制動力預警試驗開始后,電梯轎廂運行至對重和轎廂水平位置,以減少轎廂側和鋼絲繩側的鋼絲繩以及補償裝置重量的影響(如果有補償裝置)。
4)開始核心制動力預警模式:電梯制動器全程斷電,抱閘抱緊曳引輪,即帶閘運行。
5)電梯控制系統有兩種方式獲取驅動扭矩T對重(N·m):
(1)通過定量連續法準確測量模式。
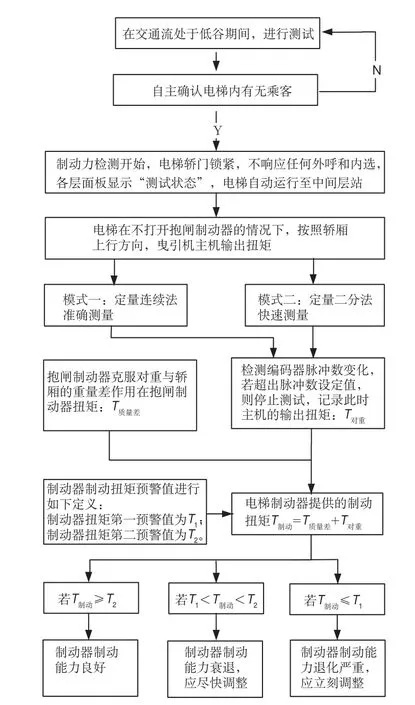
圖2 制動器預警試驗步驟
電梯在不打開抱閘制動器的情況下,按照轎廂上行方向,使曳引機主機輸出0.5T至1.1T隨時間連續變化的扭矩,通過檢測編碼器脈沖數變化,若超出脈沖數設定值,記錄超出設定值時刻的主機輸出最小扭矩:T對重(N·m)。
(2)通過定量二分法快速測量模式。
電梯在不打開抱閘制動器的情況下,驅動轎廂上行,按照二分查找算法逐一對曳引機施加定量扭矩,曳引機扭矩的施加范圍為0.5T至1.1T,通過檢測編碼器脈沖數變化,若超出脈沖數設定值,則記錄超出設定值時刻的主機輸出最小扭矩:T對重(N·m)。
6)當電梯轎廂處于和對重相平位置,無曳引機動力驅動時,抱閘制動器需要克服對重與轎廂的重量差,作用在抱閘制動器上的扭矩為:對于永磁同步電機,定義減速器傳動比:b=1,傳動系統總機械效率:η=1,即簡化為:
7)該電梯制動器提供的制動扭矩為:

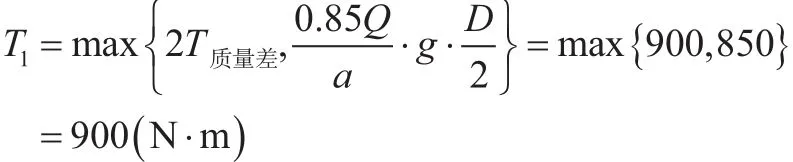
8)定義制動器第一預警值:

定義制動器第二預警值:T2=1.1T1。
若T制動≥T2,該電梯制動器提供的制動扭矩大于等于制動器第二預警值,則制動器制動能力良好;
若T1<T制動<T2,該電梯制動器提供的制動扭矩介于第一預警值和第二預警值之間,則制動器制動能力有衰退跡象,應盡快調整;
若T制動≤T1,該電梯制動器制動提供的扭矩小于第一預警值,則制動器制動能力退化嚴重,應立刻調整。
4 制動器預警現場實例
電梯基礎參數如下:
額定載重量:Q=1000(kg)
額定電流:I=39(A)
額定功率:P=17(kW)
額定扭矩:T=670(N·m)
鋼絲繩倍率:a=2∶1
電梯平衡系數:K=0.45
傳動系統總機械效率:η=1
重力加速度:g=10(m/s2)
曳引輪節圓直徑:D=0.4(m)
電梯控制系統獲取T對重=106%T=710.2(N·m),(K取0.45),則該電梯制動器提供的制動扭矩為:T制動=T質量差+T對重=1160.2(N·m)。
制動器第一預警值:
制動器第二預警值:T2=1.1T1=990(N·m)。
根據T制動>T2,即該電梯制動器提供的制動扭矩大于制動器第二預警值,表明制動器制動能力良好,符合新安裝電梯的實際使用情況。
針對該電梯制動器提供的制動扭矩:T制動=1160.2(N·m),可以折算為:在該狀態下轎廂內承載1.61倍的額定載荷(1610kg),并且轎廂在最底層時,制動器將無法克服曳引輪上驅動力矩,轎廂將開始滑移(忽略鋼絲繩和補償裝置的影響)。
在該現場,通過標準砝碼載荷試驗進行輔助驗證,將25kg的標準砝碼,均勻有序擺放至轎廂內,當承載66塊砝碼時,轎廂突然開始下降,同時在機房內確認屬于制動器打滑(排除鋼絲繩的伸長影響及鋼絲繩滑移的影響)。
當轎廂內承載25kg×66=1650kg的載荷時,轎廂突然開始滑移,這包括了導軌轎廂系統內的阻力以及鋼絲繩的實際影響。通過標準砝碼試驗驗證了該方法的準確性。
5 結論
本文通過電梯制動力預警方法[6],分別獲取單向驅動扭矩和對重轎廂質量差引起的不平衡扭矩,進而間接轉化為曳引機制動器的實際制動扭矩。在獲取驅動扭矩時,提出可以通過定量連續法準確測量和定量二分法快速測量兩種模式進行驅動扭矩的確定。借助制動器的第一預警值和第二預警值判斷制動扭矩的退化程度。最后通過對現場電梯進行制動力預警測試,驗證了該方法的適用性和準確性。該方法對于無載荷情況下驗證電梯制動器的制動能力具有重要的意義。
[1]質檢總局關于2016年全國特種設備安全狀況情況的通報[N].
[2]特種設備典型事故案例集[M]. 北京:航空工業出版社,2005.
[3]陳永玉. 電梯事故分析及檢驗對策[J]. 北京:中國高新技術企業,2015(14) :88-89.
[4]李洪. 淺談電梯制動器的結構型式與檢驗檢測[J].電氣開關,2012,50(03):100-102.
[5]李普祥. 淺談電梯曳引機制動器的設計[J]. 電梯工業,2015,93(03) :60-65.
[6]趙秋洪,孫書成,王寅凱,等. 基于大數據的電梯曳引機制動力監測方法[P]. 天津:CN105905729A,2016-08-31.
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04
