機械式操縱飛機自動上舵成因分析及氣動改善方法
2018-07-14 03:40:30劉艷趙柯黃江濤
西北工業大學學報 2018年3期
關鍵詞:飛機
劉艷, 趙柯, 黃江濤
1.西北工業大學 航空學院, 陜西 西安 710072; 2.西安飛機設計研究所, 陜西 西安 710089;3.中國空氣動力研究與發展中心, 四川 綿陽 621000
對于機械式操縱飛機來說,腳蹬力取決于其方向舵鉸鏈力矩,腳蹬位移如果與腳蹬力同方向增加,則飛機航向操縱正常。如果在大側滑狀態下方向舵偏角增加到某個位置后,駕駛員不用進一步施力,腳蹬/方向舵會自動偏轉到極限位置,即會發生一種“自動上舵”現象[1-2]。
自動上舵現象發生時,駕駛員需要反向施力才能防止方向舵自動偏到極限位置,當反向腳蹬力很大、超過駕駛員體力時,方向舵會停留在極限位置,喪失航向操縱,故該現象亦被稱為“方向舵鎖死”(rudder lock)[1,3]。
由于自動上舵與駕駛員的操縱習慣相反,需要大量精力來克服,且不可控的大方向舵偏角對飛行安全有潛在的危險性,因此飛行品質規范GJB185-86[4]、運輸類飛機適航標準第25部[5]及正常類、實用類、特技類和通勤類飛機適航規定第23部[6]均對自動上舵問題作了規定。
自動上舵問題只發生在純機械式操縱系統飛機上,在電傳操縱系統迅猛發展的近數十年,該問題的研究幾乎一片空白。然而,目前仍有一定數量的機械式操縱飛機在役;出于可靠性考慮,很多電傳操縱飛機采用了機械備份;隨著低空空域的開放,采用機械式操縱系統、駕駛者多為非專業飛行員的通用飛機將有廣闊的市場[7],因此自動上舵問題仍具有重要的研究意義與價值。
1 自動上舵
飛機保持一定側滑角所需的方向舵偏角可由(Cnβ)fix·β+Cnδr·δr=0確定[1]:
(1)
在側滑運動中,如果方向舵處于松浮狀態,將呈現一個總鉸鏈力矩為0的狀態,此時方向舵的位置被稱為浮動角:
(2)
式中,Chβ=?Ch/?β,Chδr=?Ch/?δr。
側滑為正時,由Chβ> 0,Chδr< 0及公式(2)可知,方向舵浮動角也為正,反之亦然。保持側滑所需方向舵偏角δr,reqd與方向舵松浮角δr,f隨側滑角β變化的曲線如圖1示。
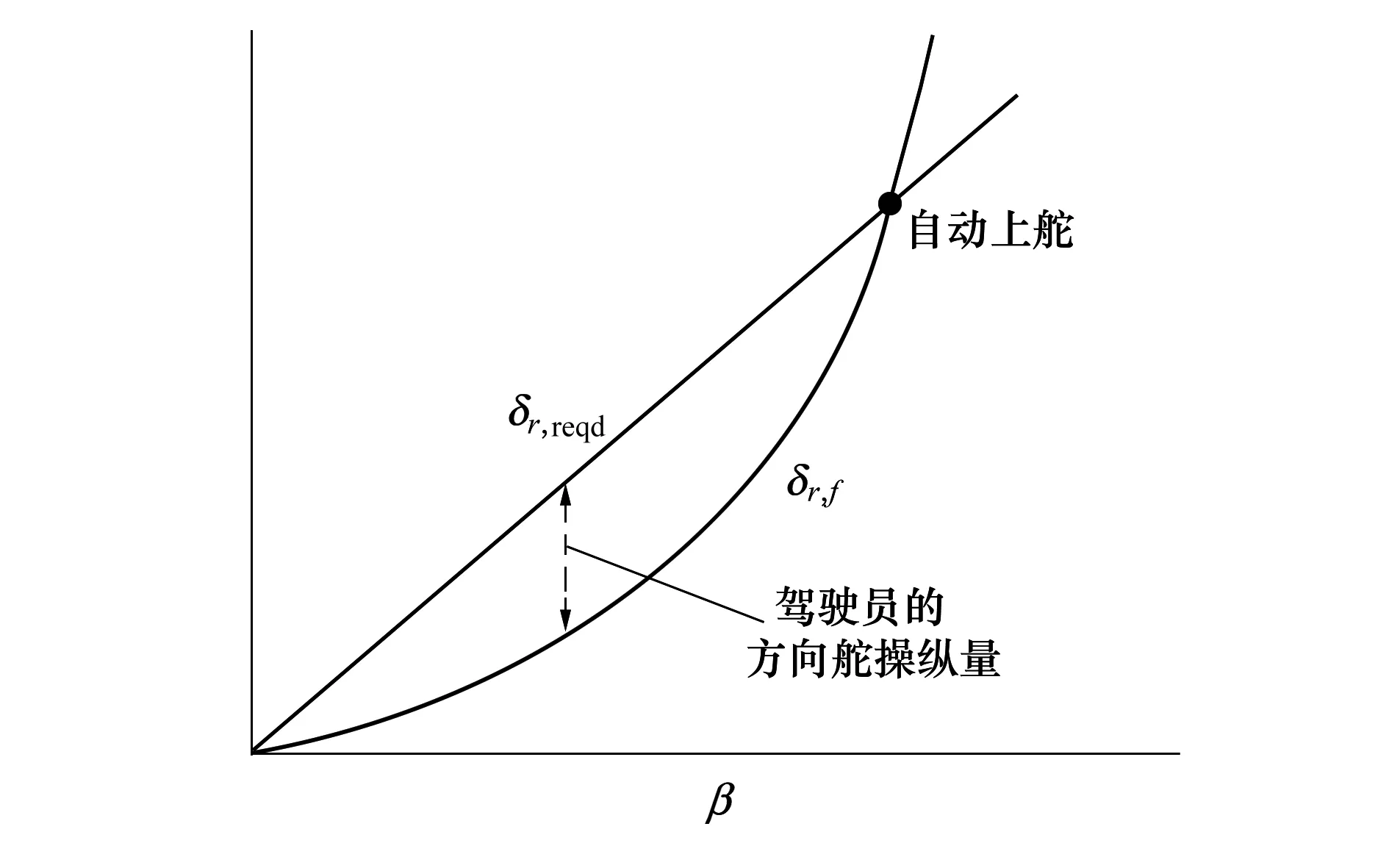
圖1 自動上舵示意圖
大側滑時,由于方向舵處的氣流分離與失速,松浮角δr,f會隨側滑角β超線性增長;當β達到某一值時,δr,f會等于δr,reqd;當β超過該值時,δr,f會超過δr,reqd,駕駛員需要施反向力才能防止方向舵自動偏到極限位置[1]。此時飛機的航向操縱是反向的,當反向腳蹬力超過駕駛員體力時,方向舵會停留在極限位置,喪失航向操縱能力。
2 成因分析
本文將以某中型渦槳運輸機為例,通過試飛數據分析與流場數值模擬對自動上舵成因進行分析。
2.1 試飛數據
圖2給出了該飛機著陸構型下,速度100節時的協調側滑試飛數據。橫坐標為滾轉角φ,縱坐標分別為腳蹬力Fp與方向舵偏角δr。其中,在協調側滑過程中,飛機滾轉角φ近似正比于側滑角β。
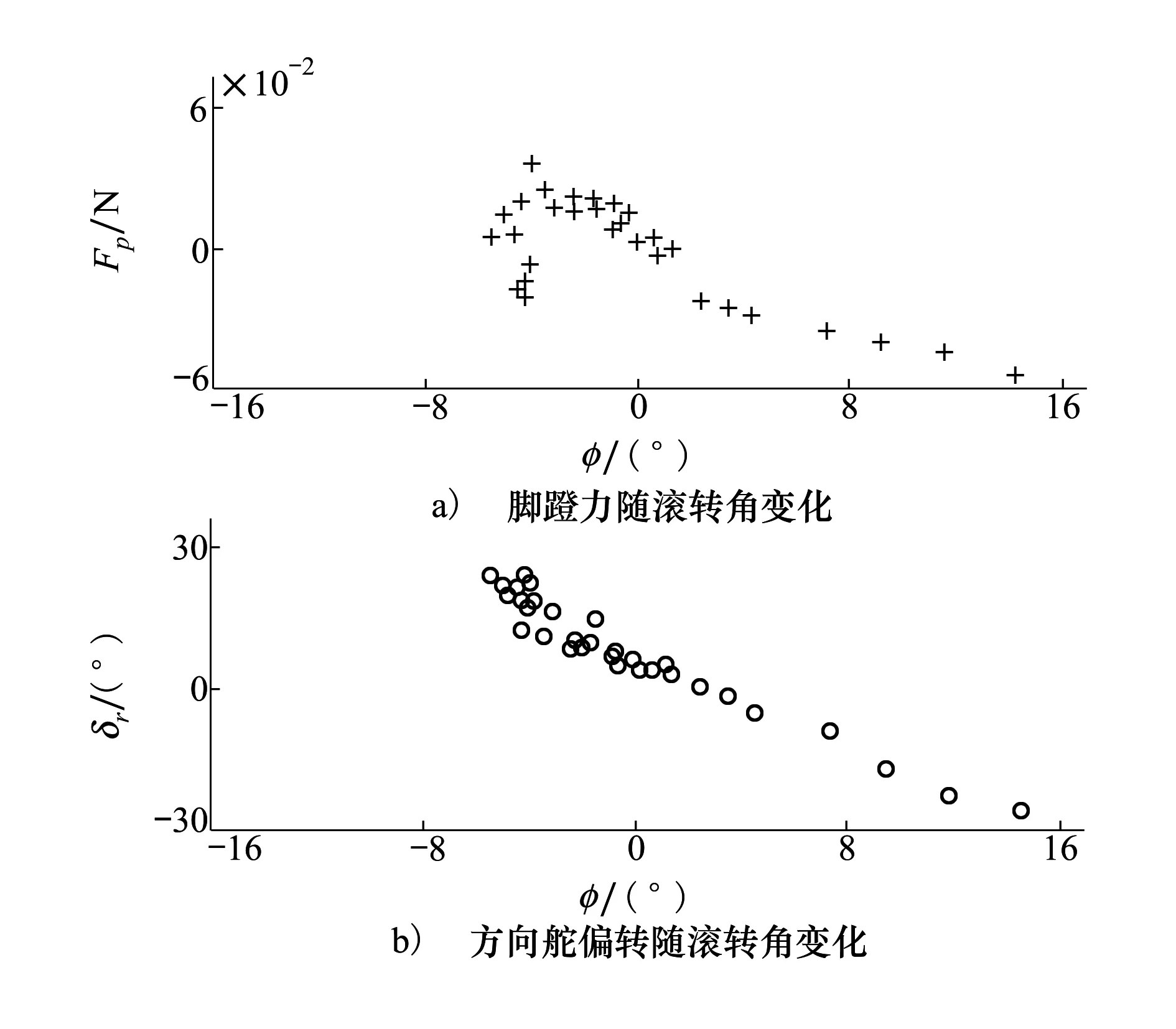
圖2 重心31%平均氣動弦長,速度100節,著陸構型
可以看出,在小側滑范圍內,δr與Fp與φ/β近似呈線性關系;左側滑較大時,δr仍與φ/β近似呈線性關系,但Fp隨φ/β變化的梯度明顯變小,當φ超過12°,δr超過15°時,腳蹬力由約400 N迅速減小,反向操縱力達約-150 N。
此外,由圖2也可以看出飛機在右側滑時并未出現自動上舵情況,這主要是由于該飛機采用的是同向左旋渦槳發動機,不對稱滑流導致飛機左右兩側的自動上舵趨勢不同[8]。
2.2 流場分析
參考前文中的試飛數據,本文采用三維非定常雷諾平均N-S方程對著陸構型下的流動進行了數值模擬,計算狀態如下:M=0.151 4,α=6.5,Re=9×106。
表1給出了該構型與狀態下不同方向舵偏角及側滑角時的鉸鏈力矩系數CFD計算結果。
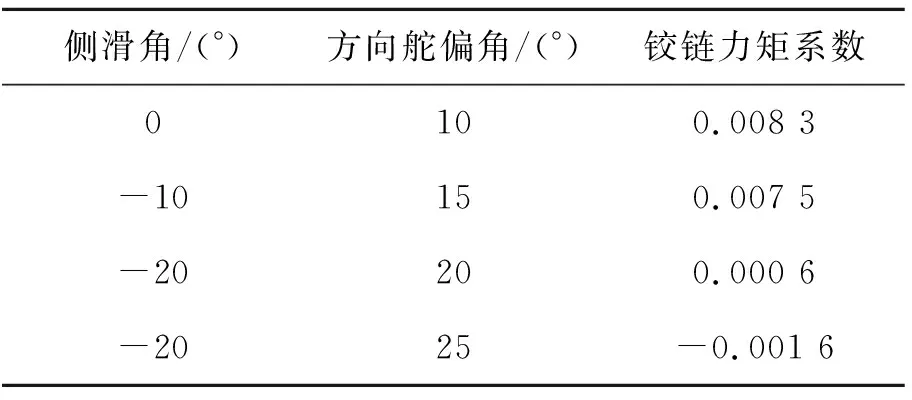
表1 著陸構型、速度100節時的鉸鏈力矩系數
可以看出,在大側滑狀態下,方向舵偏角超過一定值時,鉸鏈力矩系數會由正變負,導致操縱力反向,自動上舵發生。
圖3~圖5分別給出了不同側滑角與方向舵偏角下,方向舵部位的空間流線圖。
δr=15°,β=-10°時,整個方向舵上只有翼根后緣出現了小的分離區,大部分區域仍保持附著流動,垂尾安定面上也沒有分離區。空間流線表明背鰭部位拖出了分離渦,由于大部分流動形態仍為附著流動,并未對鉸鏈力矩造成明顯影響。
δr=20°,β=-20°時,整個方向舵的背風面出現分離區,垂尾安定面上也出現了大面積分離區。空間流線表明背鰭部位拖出了分離渦,方向舵背風面流線非常紊亂。迎風一側吸力峰值過高,使得壓心前移,鉸鏈力矩減小。
δr=25°,β=-20°時,整個方向舵背風面及垂尾安定面的分離進一步加劇,使得壓心進一步前移,導致鉸鏈力矩反向,自動上舵現象發生。
綜上可以發現,自動上舵問題主要由方向舵局部氣流分離、導致壓心前移至鉸鏈軸之前,使得鉸鏈力矩改變方向引起。
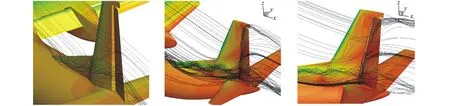
圖3 δr=20°,β=-20°時的方向舵空間流線 圖4 δr=20°,β=-20°時的方向舵空間流線 圖5 δr=25°,β=-20°時的方向舵空間流線
3 改善方案
自動上舵發生在大方向舵偏角時,最直接的避免方式就是限制方向舵最大偏度。但這樣會損失方向舵的操縱能力,并影響飛機的側風起降性能、最小操縱速度、克服不對稱推力及改出尾旋的能力。
由于自動上舵是局部氣流分離使得鉸鏈力矩反向導致的腳蹬力反向現象,因此可通過改善垂尾與方向舵失速特性,減小方向舵松浮角來改善。
3.1 雙三角背鰭
具有尖前緣的大后掠機翼,在不大迎角下,會在翼面上方形成一對穩定的旋渦,使上翼面(背風面)負壓增大,產生渦升力并推遲失速[9]。
如果在垂尾與機身連接處增加背鰭,如圖6所示,則既能增大垂尾面積,又能提高垂尾后掠角,在大側滑情況下利用渦升力提高垂尾效率并延遲失速。
由于算例飛機在已有背鰭的情況下仍有自動上舵趨勢,故可采用抗失速能力更強的雙三角背鰭,如圖7所示。
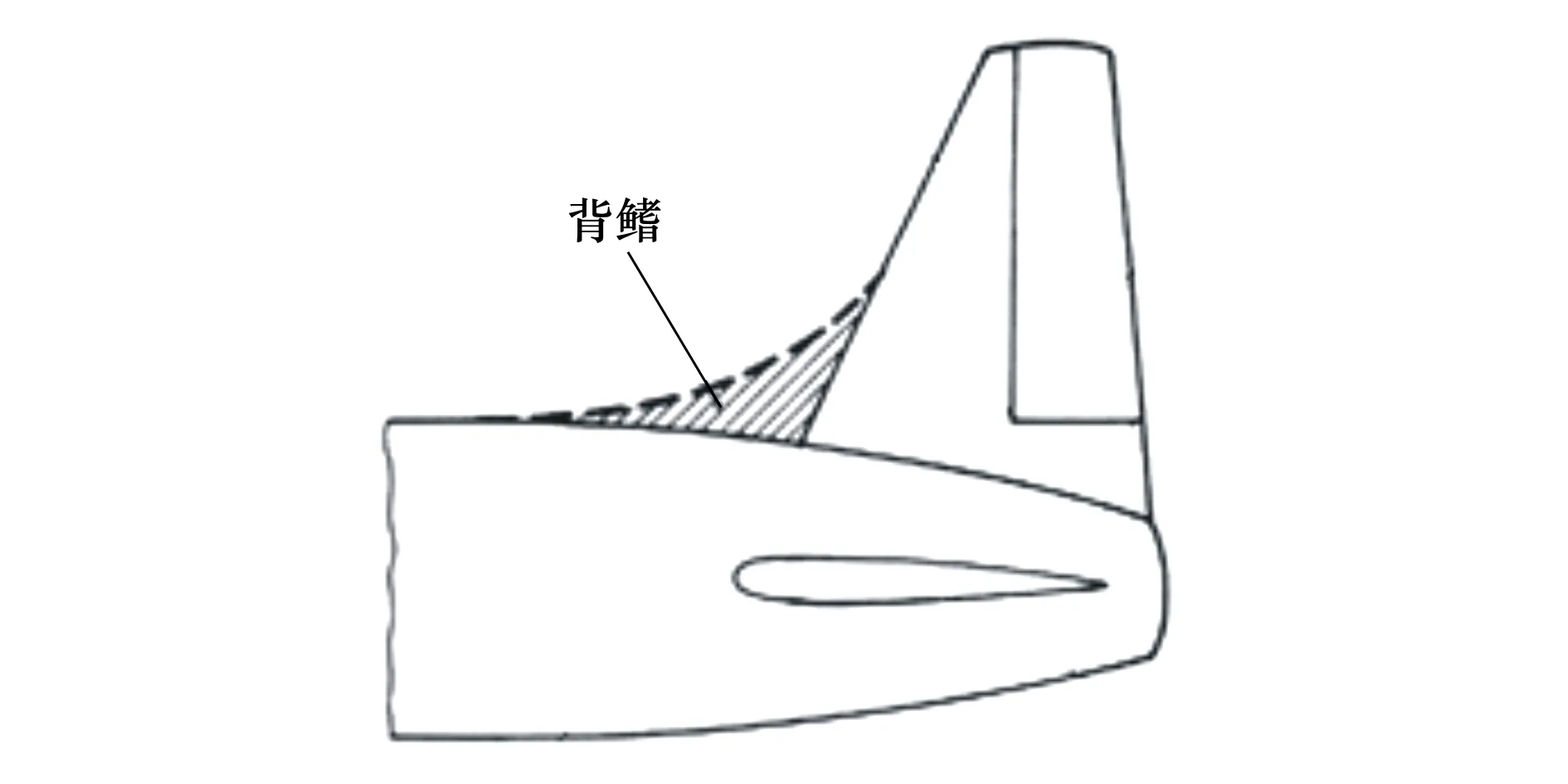
圖6 背鰭示意圖
對比圖8與圖9可以看出,原始的背鰭誘導產生的渦系影響范圍較小,對垂尾以及平尾氣動特性的作用有限。采用雙三角背鰭后,流過垂尾的氣流首先在第一道三角背鰭處誘導產生類似邊條渦的結構,然后流經第二道三角背鰭時與其上的主渦相互干擾甚至融合,因此渦系的穩定性以及強度都得到明顯加強,而且影響范圍擴大很多。正因為雙三角背鰭構型下流經平垂尾的氣流能量得到加強,平垂尾失速特性得到了明顯的改善,提高了大側滑下飛機的航向靜穩定性。

圖7 雙三角背鰭示意圖 圖8 原始布局空間流線圖9 雙三角翼背鰭布局空間流線
然而,較強的左側漩渦在改善垂尾及方向舵失速特性的同時,也使得方向舵左側后緣壓力降低,導致方向舵的壓心在未失速的情況下前移、鉸鏈力矩反向,反而使得"自動上舵"現象進一步惡化,如表2所示。
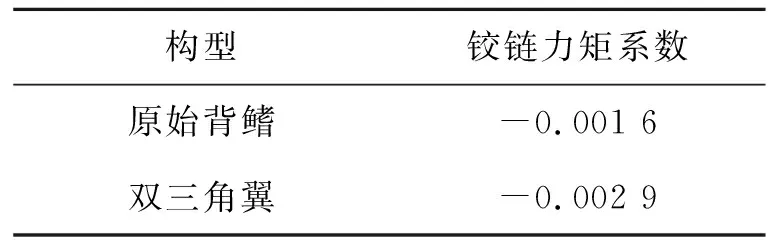
表2 鉸鏈力矩系數CFD計算結果
3.2 降低軸式補償
為降低腳蹬力,算例飛機除在方向舵上使用了調整片外,還采用了一定的軸式補償,即將鉸鏈軸后移,通過減小壓心與鉸鏈軸間的距離,降低鉸鏈力矩、減小腳蹬力。
圖10表明,使用軸式補償后,方向舵左偏時,前緣外露部分增多,流經該部分的氣流偏折得更厲害,當地攻角增大,導致出現了過高的前緣吸力峰值,使得方向舵壓心前移、鉸鏈力矩反向,繼而造成腳蹬力反向、自動上舵。
為此,本文將鉸鏈軸稍向前移,降低方向舵軸式補償,圖11顯示了降低軸式補償后的方向舵壓力分布。可以看出,軸式補償的降低使得方向舵偏轉后的右側外露部分有所減少,此時流經該處的氣流當地攻角也較小,前緣吸力峰值降低,圖12的方向舵截面壓力系數分布表明,前緣吸力峰值降低了約25%。此外由于壓力分布改變,壓心位置向后移動,鉸鏈力矩方向恢復正常,明顯改善了自動上舵現象。
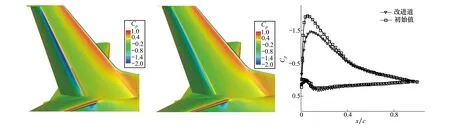
圖10 原始布局壓力云圖 圖11 降低軸式補償布局的壓力云圖 圖12 軸式補償降低前后方向舵截面壓力分布對比
由于軸式補償的功能是為了降低鉸鏈力矩與腳蹬力,對于尺寸較大的飛機,如果通過降低軸式補償來緩解自動上舵現象,勢必會增加腳蹬力,因此除了需對補償降低量進行精細化設計外,還應對方向舵通道的傳動比及調整片進行適當調整,避免由于軸式補償降低帶來的鉸鏈力矩及腳蹬力過大問題。
4 結 論
本文通過試飛數據分析及流場模擬對自動上舵的機理進行了分析:垂尾及方向舵處氣流分離與失速造成的壓心前移使得鉸鏈力矩反向;同向旋轉螺旋槳或單螺旋槳帶來的不對稱滑流會使得左右兩側的自動上舵程度不同。
基于自動上舵的機理,分別從防止氣流分離和壓心前于鉸鏈軸兩個角度提出了雙三角背鰭和降低軸式補償兩種氣動改善措施。前者可改善垂尾氣流分離特性,但同時增強了方向舵的渦強度,導致方向舵壓心進一步前移。而后者可推遲壓心前移使壓心始終位于鉸鏈軸之后,從而有效改善自動上舵現象,但會造成鉸鏈力矩與腳蹬力的增加,影響駕駛員操縱感覺,需對補償降低量、操縱傳動比及調整面進行精細化設計。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33