基于Cartwheel構型的微推力衛星高精度編隊系統
2018-07-17 07:40:54楊博趙曉濤苗峻劉旭輝龍軍
北京航空航天大學學報 2018年6期
楊博,趙曉濤,苗峻,劉旭輝,龍軍
(1.北京航空航天大學 宇航學院,北京100083; 2.北京控制工程研究所,北京100190)
近年來,通過多顆微小型衛星彼此協同工作,從而實現單個大型復雜衛星才能完成甚至難以完成的任務,已成為微小型衛星最佳的空間應用模式。其協同工作的模式可以最大限度地擴展空間系統功能,提高空間利用效率和系統可靠性,降低系統的研制和維護成本。
為進一步降低編隊衛星的運行與管理成本,提高編隊工作的實時性和靈活性,亟待尋找一種利用在軌決策的編隊運行與管理方法,以增強編隊系統魯棒性和可靠性,并盡可能減少編隊衛星能量消耗,提高反應速度。而基于微推力的衛星編隊能完成更高精度的飛行任務,提高對地觀測的精度等,可廣泛應用于地球重力場觀測、地磁觀測等需要超高精度對地觀測的科學任務中。
NASA的Deep Space 1和ESA的SMART-1都將微推力器衛星應用于深空探測領域中[1-5];美國普蘭尼特公司擁有148顆在軌微納衛星時刻進行對地觀測,其中于2017年2月發射的88顆衛星可由人單手托舉[6]。而當前在軌微小衛星編隊系統,或不進行控制,或采用電磁推進器作為動力源進行控制,但電磁推進器復雜、成本較高,限制了微納衛星控制系統的發展。中國現有微推力系統仍不能滿足微納衛星編隊的需求,已發射的微納衛星均無推力控制系統。而由北京控制工程研究所研究的MEMS微推力器陣列可以產生10-5~10-4N·s的脈沖推力,且結構簡單,成本低廉,為中國微納衛星在軌控制的發展提供了有力的技術支持和保證[7]。
從軟件上來說,由于采用微推力器,則表明控制系統不能修正過大的誤差,因此就對衛星編隊控制系統的可靠性和快速性提出了要求。快速穩定的信息交流是衛星編隊系統運行的重要保證,而具有高度可靠性和快速性的信息拓撲結構則是信息交流的前提。由于承載衛星編隊成員信息交流任務的拓撲網絡結構對衛星編隊系統有著重要的影響,從信息拓撲網絡結構的角度對衛星編隊控制系統的性能進行分析,并據此設計出有效的編隊構型、拓撲結構和控制策略就成了一個很有意義的研究方向。
本文以光學干涉成像衛星為背景,設計了一個低軌衛星編隊控制系統,包括編隊構型、拓撲結構以及控制系統,可以完成地形三維測繪和地面目標的跟蹤定位,具有極高的科學意義和軍事價值。由于衛星對地成像系統的測量要求編隊衛星之間必須保證嚴格的相對位置關系,因此必須使用高精度的導航系統和控制系統。
1 Cartwheel構型編隊飛行動力學
Cartwheel構型[8]是法國空間中心(CNES)提出的概念,其編隊由處于同一軌道平面、相對運動相位角差為120°的3顆繞飛小衛星和1顆中心主星構成。Cartwheel構型小衛星編隊利用編隊間的穩定幾何關系,通過彼此通信協作,可以實現衛星編隊測高、對地觀測等多項功能。研究發現,Cartwheel構型所形成的編隊,垂直基線穩定,在各個軌道周期中變化極小,所以對其編隊的設計和優化問題十分有意義。本節以Cartwheel編隊構型為基礎,建立衛星編隊系統相對運動模型。
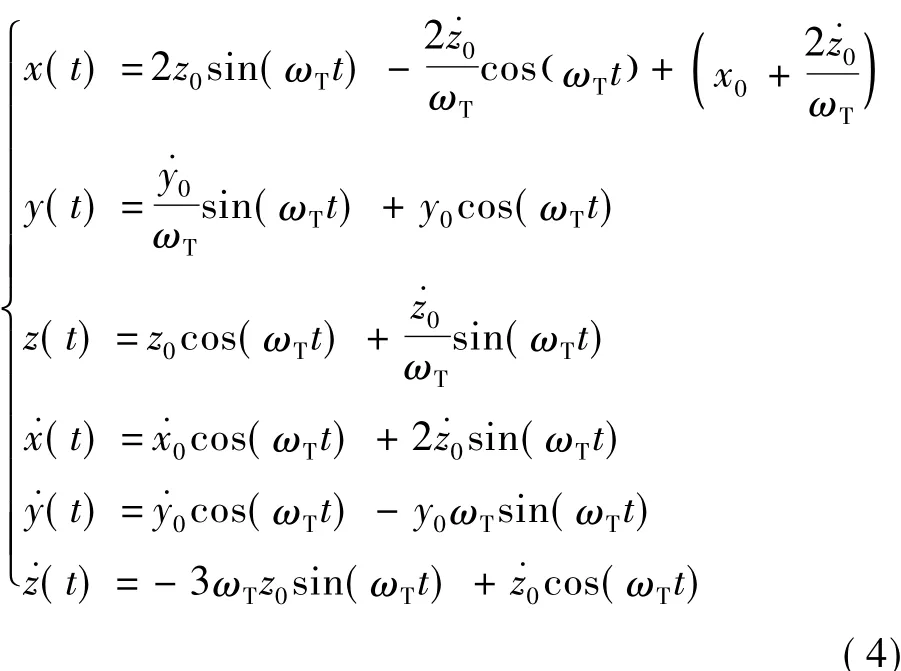
如圖1所示,相對運動的坐標系采用主星T的軌道坐標系,y軸垂直于軌道平面,z軸指向地心,x軸指向衛星T的運動方向。經過分析推導可以得到描述從星F的C-W方程如下:
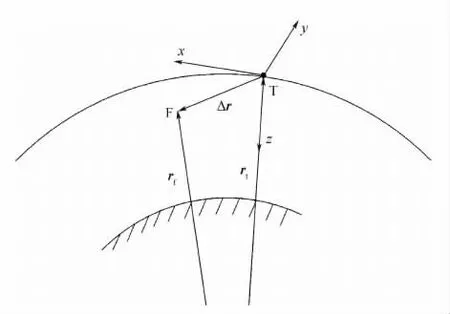
圖1 主從星間的相對運動Fig.1 Relative motion of target and follower
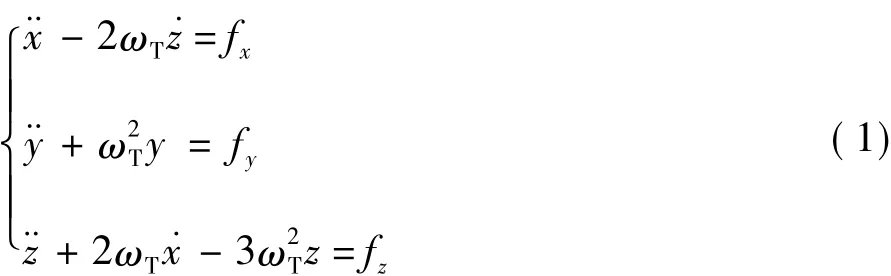
式中:ωT為主星的軌道角速度;fx、fy、fz為所受攝動力或控制力。
式(1)是本文的研究基礎。衛星構型的攝動分析、導航算法以及軌道保持控制均基于此方程。解此方程就可以得到衛星相對運動軌跡。設定合理的初值,就可以得到衛星編隊的構型。
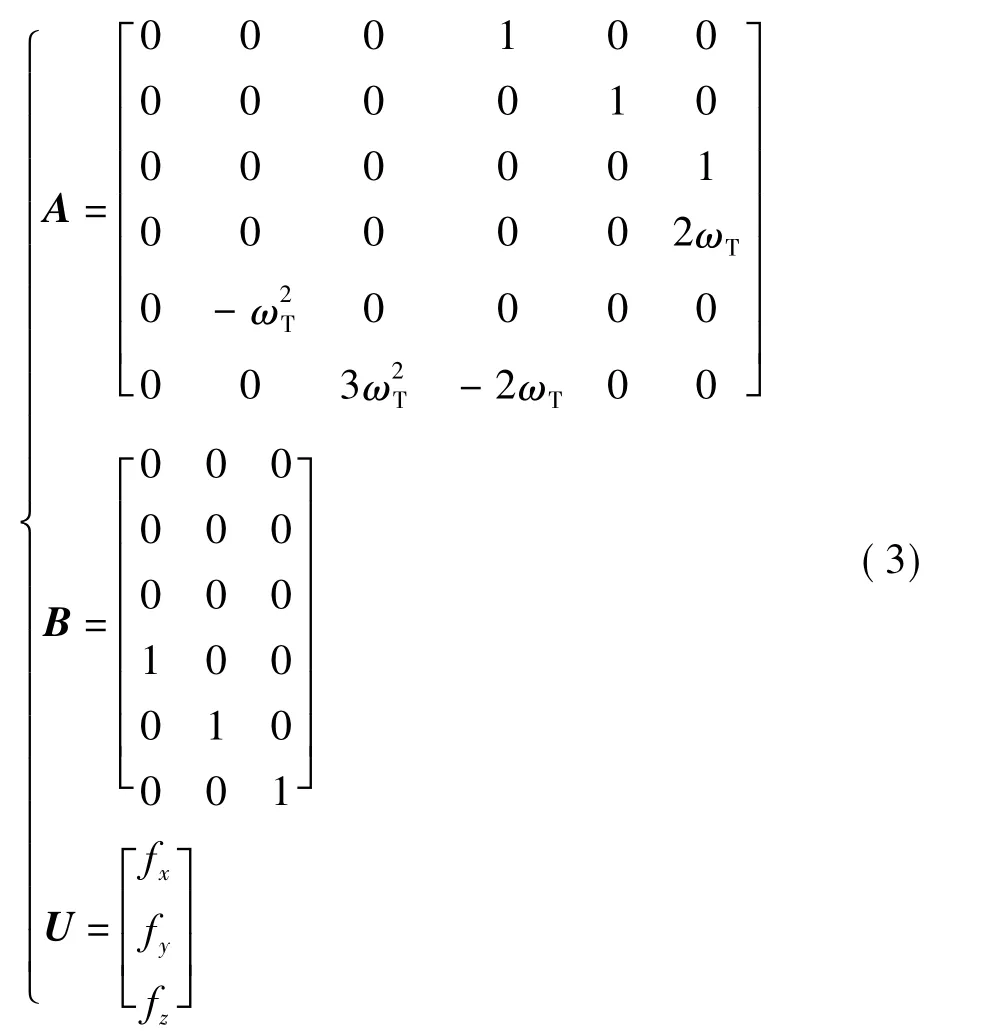
取狀態變量X=[xyz x y z]T,分別代表從星在主星軌道坐標系中的3軸坐標和3個方向的速度,C-W方程可寫為

式中:
求解可知,當6ωTz0-3=0時,相對運動構型穩定,其軌道為一閉曲線。解為
此時,Cartwheel編隊的相對運動為2種運動的疊加,即為在主星T軌道平面內的橢圓繞飛軌道(長短軸為2∶1)和沿主星T法線方向的簡諧運動,可以嚴格證明二者的疊加運動為與主星軌道平面 xo-yo夾角為30°或150°的圓軌道平面xc-yc,如圖 2 所示[9]。
2 衛星編隊拓撲結構設計與分析
衛星編隊系統穩定運行的關鍵在于編隊衛星之間信息的交互,而其拓撲結構就是信息交互的渠道。在微推力器作用下的衛星編隊系統中,由于衛星編隊的高精度要求和微推力器作用效果不足之間的矛盾,又對衛星節點間信息傳遞的快速性提出了要求。研究與分析衛星編隊系統的拓撲結構,可以有效提高衛星編隊的快速性和穩定性。本節將對基于Cartwheel構型的衛星編隊系統的信息拓撲結構進行分析和比較,并據此選擇4節點衛星最優拓撲結構。
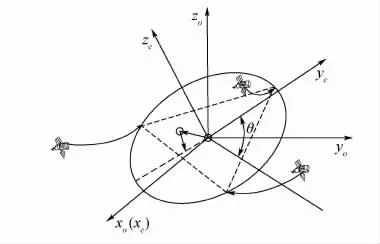
圖2 Cartwheel構型空間示意圖Fig.2 Space schematic diagram of Cartwheel configuration
2.1 適用于微推力衛星編隊的拓撲結構分析
衛星編隊系統的拓撲結構是實現信息交換和共享的基礎。而衛星編隊系統長時間在太空中進行高精度編隊保持,系統要實時對各衛星進行軌道控制,以保證編隊構型[10]。
第1節中已確定采用主星沿太陽同步軌道,從星對主星進行圓軌道繞飛的Cartwheel編隊構型。下面對針對此編隊構型的幾種常用信息拓撲結構進行分析。
網絡拓撲結構指網絡中各節點相互連接的方式,在衛星編隊系統網絡應用中,主要的拓撲結構包括星形拓撲、環形拓撲和網形拓撲。
研究網絡拓撲結構性能的最常見手段是通過圖論知識研究拓撲結構的特征參數,分析信息網絡的性能,其中平均最短路徑(Average Shortest Path,ASP)和拓撲可靠性可用于對衛星編隊飛行系統進行快速性和可靠性分析。
1)平均最短路徑
平均最短路徑表示網絡中2個信息節點的信息交互需要經過的最短中介路程,可以表示為

式中:N為節點的集合;n為集合中節點的個數;d(i,j)為節點i和節點j之間的最短路徑。
平均最短路徑越大,網絡中信息傳遞的路程越長,信息傳輸時間就越久,因此平均最短路徑越小越好。
2)拓撲可靠性
拓撲可靠性主要分析信息網絡中有節點或信息鏈路被破壞或暫時故障時,信息網絡是否仍能正常運作,或者因之產生如時滯、丟包、噪聲等因素對系統帶來的影響等。通常,對拓撲G(N,E)的可靠性RG可定義為
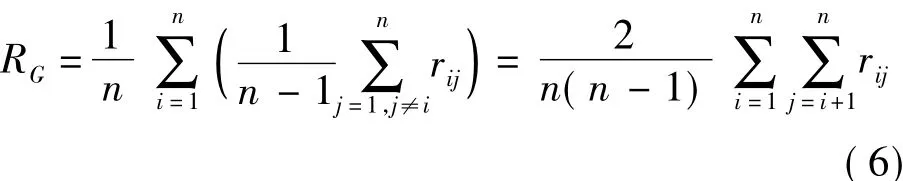
式中:rij為節點i到節點j之間的可靠性。
現綜合兩方面分析本節中確定的編隊構型在不同拓撲結構下的快速性和可靠性。分析由4個節點,即1顆中心主星和3顆環繞星做成的衛星編隊系統構成的星形、環形、網形(全連通)拓撲結構參數,如圖3所示。設拓撲結構中節點和鏈路的可靠性k都為0.8。
根據表1中計算結果分析可知,在Cartwheel構型衛星編隊系統中,節點數較少,故每種拓撲構型的平均最短路徑值都很小,信息傳遞的效率很高,時滯較小。但由于星形結構和網形結構的信息傳遞過程中都需要經過中心節點,對中心節點處衛星的通信系統要求提出了更大的要求。且星形結構中一旦中心節點發生通信故障,則系統通信無法繼續進行。而網形結構存在過多的冗余通信鏈路,雖然為通信網絡提供了更高的可靠性和容錯性,但同時也提高了網絡搭建成本和對通信設備的要求。環形結構與星形結構相比可靠性略勝一籌,當某一鏈路或節點損壞時,經由之傳遞的信息可從另一方向的節點和鏈路傳遞,只是有可能使信息傳遞路徑變長,增加信息傳遞的時滯;而與網形結構相比,組網成本和難度大大降低。
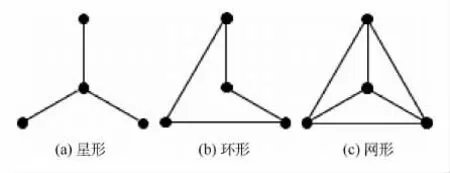
圖3 4節點衛星編隊常用拓撲結構Fig.3 Common topological structure of satellite formation with four nodes
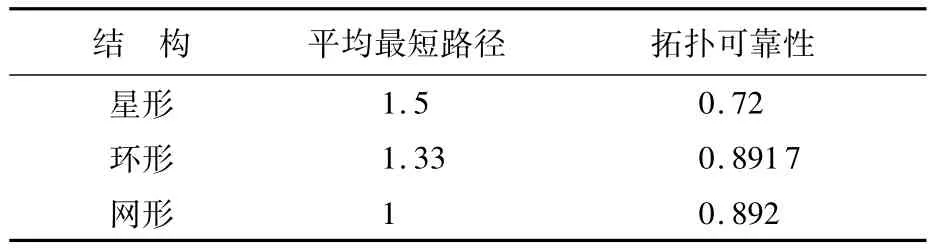
表1 Cartwheel構型編隊4節點拓撲結構性能比較Table 1 Topological structure performance comparison of Cartwheel configuration formation with four nodes
針對本文微推力衛星編隊系統快速性和可靠性的需求,既要求衛星編隊系統中信息的快速有效傳遞,又要求衛星編隊系統有發生局部通信故障時持續工作的能力。綜合幾種適用于衛星編隊的拓撲結構的優缺點,環形拓撲結構具有較高的快速性和可靠性;同時,相比于網形拓撲結構,又具有結構簡單、易于實現、減輕對星載通信系統的要求。
2.2 基于拓撲結構對編隊構型修正
當伴飛軌道與主軌道相差很小且為近圓軌道時,通過對其動力學模型線性化,得到C-W方程,當初始條件滿足一定關系時,其運動是穩定的。但C-W方程的穩定解是必須嚴格滿足初始條件并對環境理想化,且衛星間相對距離比較小的情況下才能得到,與實際情況略有差別。
衛星間通過信息拓撲系統可以進行信息交互,互換彼此的狀態信息。拓撲結構中的相鄰星可以利用彼此的相對狀態信息(相對距離、方位角)對編隊構型進行修正。
根據自然編隊構型以及環形拓撲結構,如圖4所示,根據其相對幾何關系,每顆衛星可根據其相鄰2顆衛星的運動狀態推算出本星的運動狀態。
以衛星j1、j2推導衛星i的運動狀態為例。
由1.2節可知,自然編隊空間圓軌道平面與編隊整體繞地球軌道平面夾角為30°,在編隊軌道坐標系中,由衛星導航系統可實時獲得衛星的位置和速度信息Rs和V,以及環繞星在編隊軌道坐標系中的角速度ω。
在編隊軌道坐標系中,由衛星j1、j2將自身狀態信息傳遞給衛星i,衛星i進行實時結算,可得出衛星i相對于衛星j1、j2的目標位置矢量Rj1i、
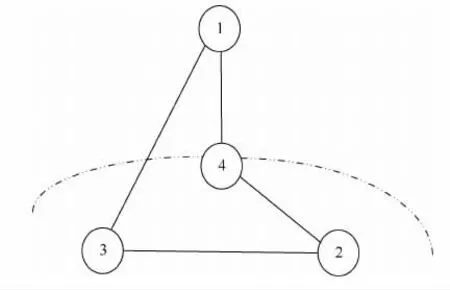
圖4 擬采用的環形拓撲結構Fig.4 Annular topologital structure to be used
Rj2i,如圖5所示。
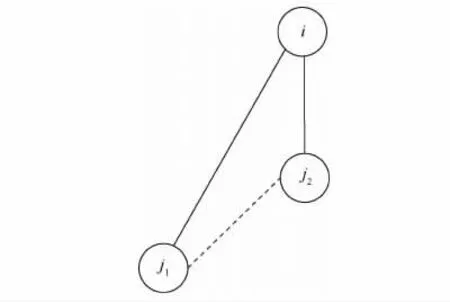
圖5 衛星j1、j2推導衛星i的相對幾何關系圖Fig.5 Relative geometric diagram for satellite i deduced by satellite j1and j2
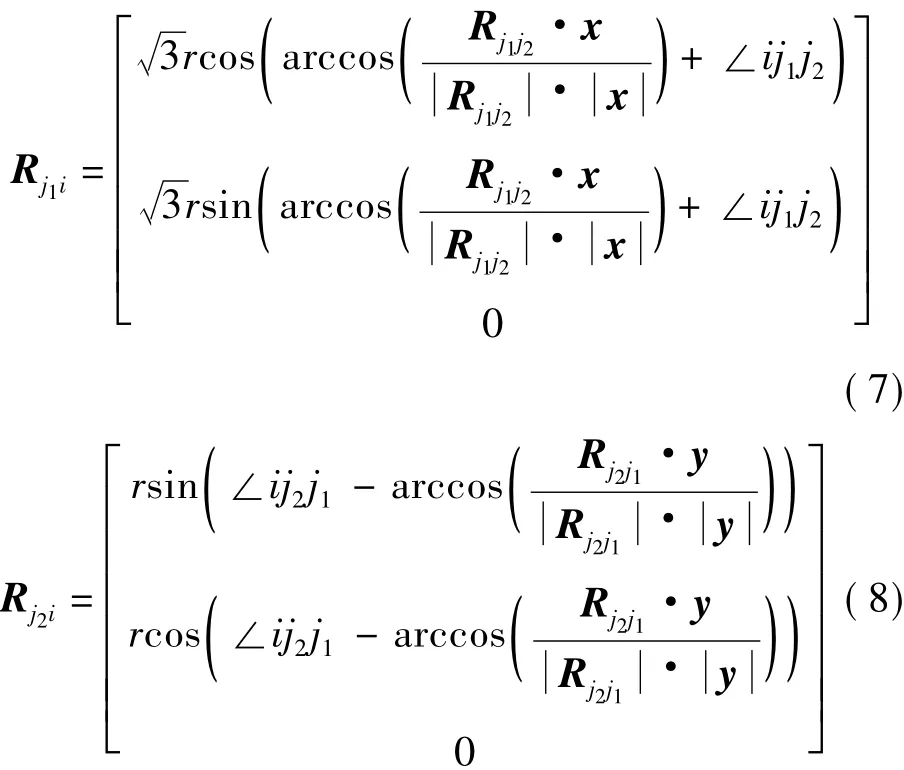
式中:x、y為編隊軌道坐標系x、y方向單位向量;r為自然編隊圓半徑。
將衛星i在編隊軌道坐標系中的旋轉角速度ωi叉乘 Rj1i、Rj2i,即可得到衛星 i相對于衛星 j1、j2的目標速度矢量 Vj1i、Vj2i。

綜合考慮2顆目標星j1、j2在衛星編隊系統中的重要性及其各自的實際可靠性后,選取合適的權值kj1、kj2,加權到式(9)求得的相對位置速度矢量中,即可求得本星的目標狀態矢量。
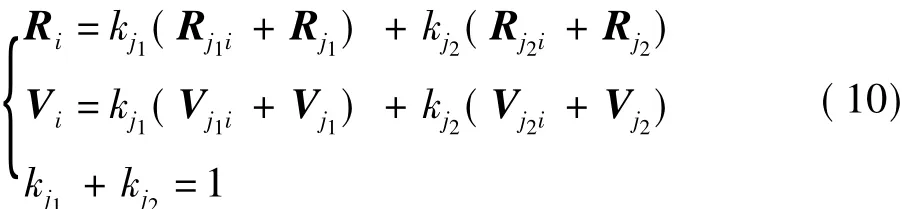
將其轉換到編隊整體繞地球飛行的軌道坐標系中,如下:

式中:CM為編隊軌道坐標系到編隊整體繞地球的軌道坐標系的轉換矩陣,即
當考慮到信息傳遞以及處理的時滯影響,假設時滯δt已知,則時滯后的位置矢量可結算得出Rdt=R0+δt·V0,在短時滯內速度變化量可忽略不計。
表2為加入1s時滯,隨機導航誤差(0.03mm),經過式(7)~式(11)結算后得到的目標運動狀態與事先設計好的理想自然編隊軌道比較。
綜合比較各種影響因素,模型的計算誤差主要來源于隨機導航誤差,但仍能經過結算后將導航誤差對目標運動狀態的影響減小一個量級。時間延遲對計算精度有一定影響,但影響不大。

表2 拓撲結構對編隊構型的修正效果Table 2 Effect of topological structure on formation configuration modification
3 衛星編隊協同控制
衛星編隊飛行系統的編隊構型和拓撲結構的設計分析,以及相應的編隊構型和拓撲結構的選取只能為其提供一個好的初始及期望狀態,而衛星編隊系統能長期穩定運行并完成空間任務,則必須對衛星編隊系統進行有效控制。對于衛星編隊飛行系統的保持控制是精密控制,控制的頻度較高,所以必須進行實時的閉環控制,因此需采用自主軌道保持的控制方式。另外,由于系統的控制精度要求,需要使用精細的微推力器,不能提供大推力用于修正較大的軌道誤差,因此對系統的快速性需求大大提高[11-13]。
3.1 基于LQR的衛星編隊保持協同控制策略
衛星編隊系統的協同控制主要分為控制編隊整體相對于預期軌道的保持,以及衛星編隊中各子星的構型保持。衛星編隊協同控制的工作主要如下:
1)根據導航信息規劃編隊整體在慣性坐標系中的位置矢量[xoiyoizoi]T。
2)根據導航信息為編隊衛星規劃任務,使其滿足圍繞編隊中心的期望構型。
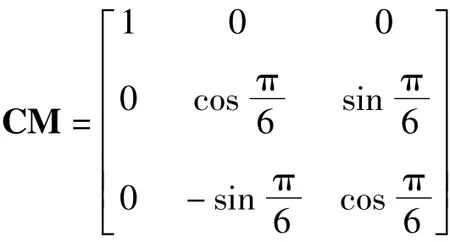
2部分工作產生帶控制的2部分誤差,即為保證編隊整體不偏離預定軌道,編隊整體相對于標準軌道的誤差eformation和每顆從星為了保持編隊構型的誤差estructure,如圖6所示。2部分誤差矢量相加即為待控量eused。
圖6 衛星編隊構型協同控制任務規劃Fig.6 Satellite formation configuration collaborativecontrol mission planning

式中:Q和R分別為優化過程中誤差和控制量的權值,它們分別決定于控制精度和燃料消耗在控制系統中的重要程度。對確定的Q和R,最優控制有唯一解:

式中:P為Riccati方程的解。

本文中的編隊保持顯然是一個精度要求高的控制,因此,應選擇較大的R。但同時也要考慮到系統的動態品質和穩定度,調整Q和R參數,在保證控制有效性的情況下盡量節省燃料。
3.2 基于粒子群優化算法的能量優化策略
粒子群優化(Particle Swarm Optimization,PSO)算法也稱鳥群覓食算法[15],是目前應用最為廣泛的群體智能優化算法。PSO算法是一種元啟發式算法,利用群體中的個體對信息的共享,從而使得整個群體的運動在問題求解空間中產生從無序到有序的演化過程,從隨機解出發,經過迭代尋覓最優解,其解的品質由適應度來評價。
運用3.1節中LQR控制,只能保證單顆衛星對修正與目標運動狀態之間的偏差,使得能量最
衛星編隊控制方法采用線性二次最優控制(LQR)[14]。在編隊衛星相對運動狀態漂移的情況下,設計推進器沖量需求,使在其作用下,把系統由偏離理想軌跡的狀態驅動到滿足編隊構型的目標相對運動狀態,同時使性能指標J取為最小值。
將上面得到待控誤差e=eused=eformation+estructure代入誤差狀態方程:

取LQR控制的優化指標為優。但在衛星編隊飛行協同控制系統中,并沒有綜合考慮到整個系統的能量消耗。
考慮衛星編隊構型保持系統整體的任務分配,以保證衛星編隊構型為第一目標,以減少整體能量消耗為優化指標。如圖7所示,若簡單采用LQR控制,則為修正每顆衛星實際運動狀態與目標運動狀態之間的偏差。現考慮合理地將修正任務重新分配給每顆衛星,以減少能量消耗。將某顆衛星的目標運動狀態放大到誤差允許范圍內在軌道圓上的一個弧段,為了嚴格保持編隊構型,編隊中其他星的目標運動狀態同時隨之改變。運用PSO算法,以衛星編隊系統整體能量消耗為搜索函數,尋找在誤差允許范圍內這一弧段上的最優點,即為能量最優點。
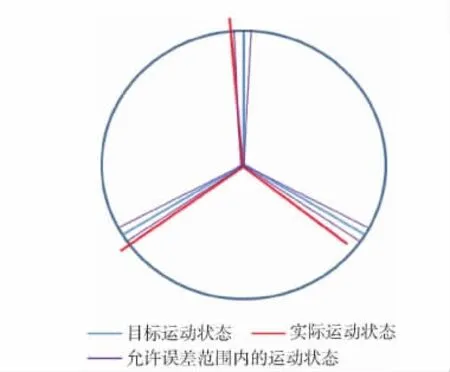
圖7 基于PSO算法將控制任務重分配Fig.7 Control task redistribution based on PSO algorithm
假設繞飛衛星位于同一相對運動軌跡圓上,3顆衛星相對均勻分布,則3顆衛星在虛擬中心軌道坐標系中的相位可表示為
φkd=ωTt+ ψ +2(k - 1)π/3 k=1,2,3 (15)
觀察式(15)可發現,只有一個參數ψ可供優化,將ψ設為0.01°幅值的扇形空間。將優化函數 Jψ設為
運用PSO算法,求得可使優化函數Jψ取得最小值時的ψ。與之對應,則可求得3顆衛星在虛擬中心軌道坐標系中的期望位置向量[xkdykdzkd]T,從而求得待控誤差 e,代入3.1節的控制方法中用于求解。
4 仿真校驗
本文中仿真采用邊長為20cm、質量為1kg的立方星,考慮大氣阻力、太陽光壓、日月引力等攝動因素。編隊整體沿太陽同步軌道運動,編隊內部3顆衛星沿半徑為1.5 m的圓繞中心領航星運動,編隊內部軌道面與太陽同步軌道面成30°夾角,微推力器單個比沖為10-5N·s。控制過程中,領航星不受控制,對于3顆環繞星分別運用第2節和第3節中提到方法,使用PSO算法搜索對控制任務進行重分配后控制進行仿真,仿真效果如圖8和圖9所示。
3顆環繞衛星執行編隊建立和編隊保持的整體誤差變化如圖8和圖9所示,圖中藍、紅、橙線分別表示衛星三軸的誤差信息。利用PSO算法對控制任務進行重新分配,編隊能夠在約500~600 s的時間完成高精度重構;在軌道保持階段,位置誤差可保持在0.002 m(3σ),速度誤差可保持在4×10-5m/s(3σ)以下,能夠較精確地完成控制任務。
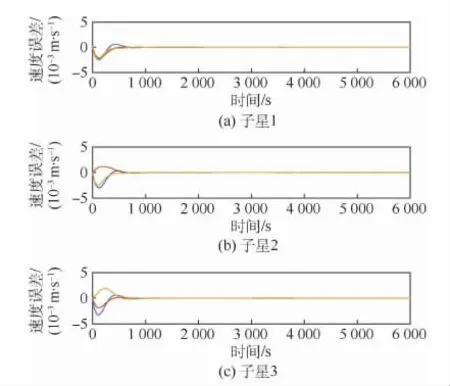
圖9 Cartwheel構型編隊三軸速度誤差Fig.9 Triaxial velocity error of Cartwheel Configuration formation
4.1 能量優化仿真算例
對3顆環繞星分別進行地面事先規劃所有目標點和實時PSO搜索目標點的控制策略,從能量消耗和控制精度2方面進行對比,如表3所示。
如表3所示,應用PSO算法可在盡量不影響控制精度的前提下,大幅度減少微推力器消耗,以提高衛星在軌壽命。
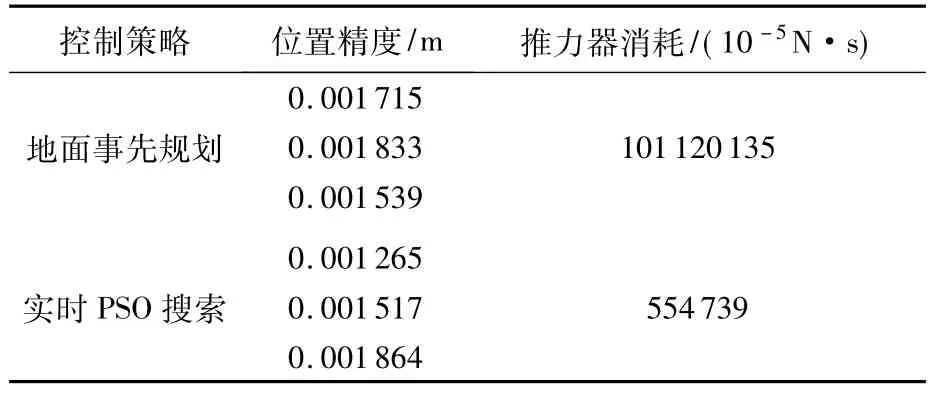
表3 地面事先規劃所有目標點和實時PSO搜索目標點控制效果對比Table 3 Control effect comparison between ground planning of all targets in advance and real-time searching of targets by PSO
4.2 導航誤差對編隊保持系統影響仿真算例
當衛星在軌飛行時,需要通過導航系統實時獲得自身的運動狀態信息,同時通過拓撲信息網絡獲得網絡中相鄰衛星的運動狀態信息,高精度的導航信息是高精度控制的前提和保證。但是衛星實際運行過程中的導航誤差是不可避免的,2.2節中,基于拓撲結構對編隊構型的修正算法已經可以有效減小導航誤差的影響,然而并不能完全消除。利用基于拓撲結構的控制算法,并在PSO算法將控制任務重新分配后,能有效減小導航誤差對控制系統精度的影響。如在4.1節的仿真中,在每一次獲取導航信息時加入隨機誤差,分析導航誤差對編隊保持系統的影響。
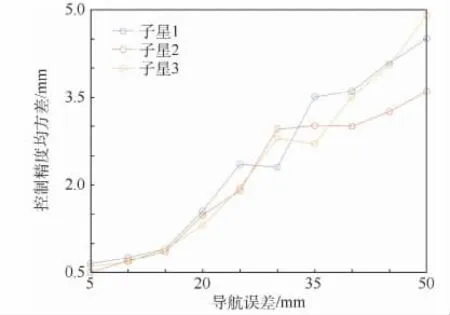
圖10 不同導航誤差對控制精度的影響Fig.10 Influence of different navigation errors on control precision
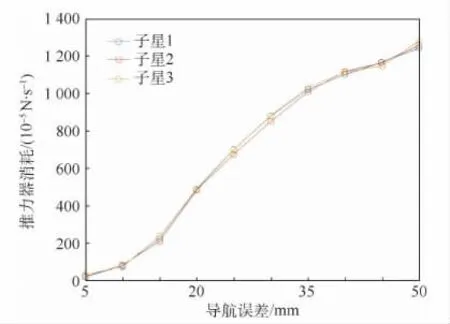
圖11 不同導航誤差對推力器消耗的影響Fig.11 Influence of different navigation errors on thrust consumption
如圖10和圖11所示,實時在線規劃算法可有效減小導航信息對編隊保持的影響,能保持較高的控制精度,但當導航誤差過大時,由于所使用的微推力器單個沖量太小,能量消耗過多。因此,這種應用微推力器的衛星編隊保持系統應同時具備較高精度的導航系統。
4.3 拓撲結構容錯仿真算例
衛星在軌運轉過程中,難免會受到干擾,通信鏈路暫時中斷,甚至永久無法使用。若采用星形結構,不難發現,發生通信鏈路損壞的衛星將完全處于失聯狀態,從而失去控制。當采用環形拓撲結構時,當某一條通信鏈路損壞時,原信息可經由另一條鏈路傳遞,只是由于其信息傳遞路徑變長,會造成更長的時滯;只有當與某一顆衛星連接的2條通信鏈路同時損壞時,該顆衛星才會失聯,與星形結構相比,大大提高了系統的可靠性。
環形拓撲結構通信鏈路的損壞分為以下2種情況,即與中心領航星無關的鏈路損壞和與中心領航星有關的鏈路損壞,如圖12所示。現分別對這2種情況進行仿真,如表4所示。
由以上仿真可知,當考慮到拓撲結構中通信鏈路的損壞時,雖然系統仍能較正常的運轉,而由于時滯變長使得誤差積累以及由于信息滯后造成的計算誤差,使得整個系統的控制精度會有不同程度的下降,推力器消耗也會大大提高。由于中心領航星在系統中占據較重要的地位,故3.2節提到的基于拓撲結構的修正算法中所占用的權值也較大,所以當與之有關的通信鏈路發生故障時,對系統也會產生更大的影響。
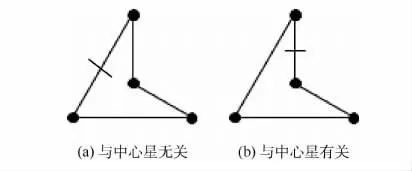
圖12 2種通信鏈路損壞示意圖Fig.12 Schematic diagram of two types of communication link damage
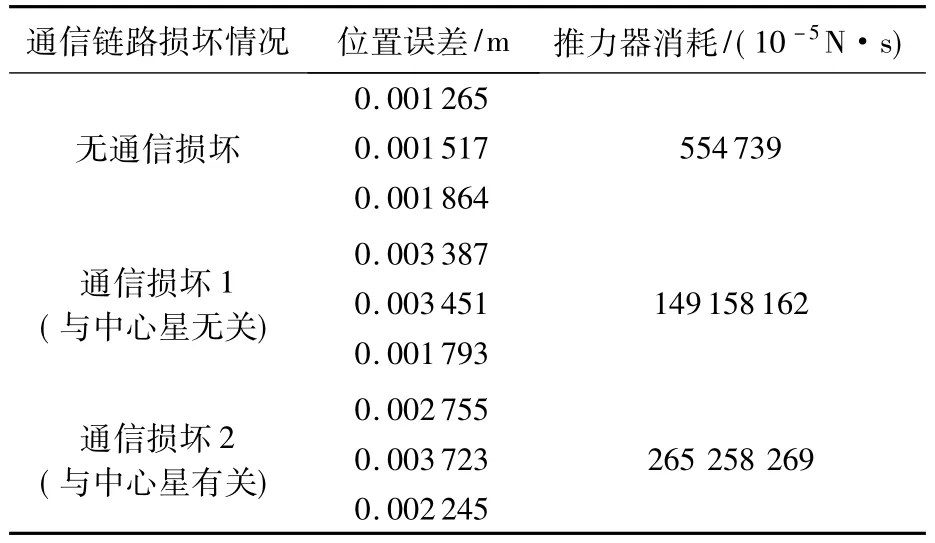
表4 在線搜索算法對于解決通信鏈路損壞問題的效果Table 4 Effect of online search algorithm on problem solution of communication link damage
5 結論
本文研究了微推力下的衛星編隊保持問題及其應用,并進一步做出了一定優化。
1)設計了適用于光學干涉測量和對地觀測的Cartwheel編隊構型,并針對此編隊構型分析了其各種拓撲結構的特性,選取環形拓撲結構,并設計了基于環形拓撲結構對衛星編隊構型的修正算法。
2)在此基礎上,利用LQR控制,并加入PSO算法對控制任務進行重分配,實現了微推力下的高精度衛星編隊保持任務。
仿真表明,所設計的控制器能較好地完成對預定編隊構型的保持,保持較高的精度的同時盡可能減少能量的消耗;在加入隨機導航誤差或模仿通信鏈路損壞時,仍能較好地完成控制任務;兼顧了快速性和可靠性。然而當控制過程受到影響時,控制精度不可避免地會有些降低,能量消耗有所提高,如何降低這些因素對控制系統的影響,將是下一步的研究方向。
[1] REICHBACH J,SEDWICK R J,MARTINEZ-SANCHEZ M.Micropropulsion system selection for precision formation flying satellites[D].Cambridge:Massachusetts Institute of Technology,2001.
[2] SCHARF D P,KEIM J A,HADAEGH F Y.Flight-like ground demonstrations of precision maneuvers for spacecraft formations—Part I[J].IEEE Systems Journal,2010,4(1):84-95.
[3] SCHARF D P,KEIM J A,HADAEGH F Y.Flight-like ground demonstrations of precision maneuvers for spacecraft formations—Part II[J].IEEE Systems Journal,2010,4(1):96-106.
[4] RAYMAN M D,VARGHESE P.The Deep Space 1 extended mission[J].Acta Astronautica,2001,48(5-12):693-705.
[5] RACCA G D,MARINI A,STAGNARO L,et al.SMART-1 mission description and development status[J].Planetary & Space Science,2002,50(14):1323-1337.
[6]劉博,特日格樂,王聰,等.印度“一箭104星”任務簡析[J].國際太空,2017(4):55-61.LIU B,TERGEL,WANG C,et al.Analysis on the mission of India’s launching of 104 Satellites on a single rocket[J].Space International,2017(4):55-61(in Chinese).
[7]楊靈芝,魏延明,劉旭輝.MEMS固體微推力器陣列發展研究[J].空間控制技術與應用,2016,42(1):13-19.YANG L Z,WEI Y M,LIU X H.Development of MEMS solid propellant micro-thruster array[J].Aerospace Control and Application,2016,42(1):13-19(in Chinese).
[8] MASSONNET D.Capabilities and limitations of the interferometric Cartwheel[J].IEEE Transactions on Geoscience & Remote Sensing,2001,39(3):506-520.
[9]范林東,楊博,苗峻,等.基于SiC MEMS陣列的高精度微納衛星編隊保持[J].中國空間科學技術,2016,36(2):37-45.FAN L D,YANG B,MIAO J,et al.High precision micro-nano satellite formation keeping based on SiC MEMS micro thruster array[J].Chinese Space Science and Technology,2016,36(2):37-45(in Chinese).
[10]張安慧.大規模航天器編隊協同控制性能分析與信息拓撲設計[D].哈爾濱:哈爾濱工業大學,2013.ZHANG A H.Performance analysis and information topology design for large scale spacecraft formation coordinated control[D].Harbin:Harbin Institute of Technology,2013(in Chinese).
[11] TILLERSON M,INALHAN G,HOW J P.Coordination and control of distributed spacecraft systems using convex optimization techniques[J].International Journal of Robust & Nonlinear Control,2002,12(2-3):207-242.
[12] ALFRIEND K,VADALI S R,GURFIL P,et al.Spacecraft formation flying:Dynamics,control and navigation[M].Oxford:Butterworth-Heinemann,2009.
[13] JOHNSON L B,CHOI H L,PONDA S S,et al.Decentralized task allocation using local information consistency assumptions[J].Journal of Aerospace Information Systems,2017,14(2):103-122.
[14] ULYBYSHEV Y.Long-term formation keeping of satellite constellation using linear-quadratic controller[J].Journal of Guidance,Control,and Dynamics,1998,21(1):109-115.
[15] FERNANDEZ-MARQUEZ J L,SERUGENDO G D M,MONTAGNA S,et al.Description and composition of bio-inspired design patterns:A complete overview[J].Natural Computing,2013,12(1):43-67.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中外會展(2014年4期)2014-11-27 07:46:46