基于RCS統(tǒng)計(jì)特征的船舶目標(biāo)識(shí)別方法
2018-07-25 06:30:24紀(jì)永強(qiáng)徐高正石宇豪張玉萍楊金鴻
艦船科學(xué)技術(shù) 2018年7期
紀(jì)永強(qiáng),劉 通,徐高正,石宇豪,張玉萍,楊金鴻
(中國(guó)船舶工業(yè)系統(tǒng)工程研究院,北京 100190)
0 引 言
無(wú)論是軍用還是民用方面,船舶目標(biāo)識(shí)別都有極其重要的應(yīng)用背景。雷達(dá)是船舶目標(biāo)探測(cè)的重要手段之一,雷達(dá)目標(biāo)識(shí)別是在雷達(dá)對(duì)目標(biāo)定位基礎(chǔ)上,根據(jù)目標(biāo)的雷達(dá)回波信號(hào),提取目標(biāo)特征,實(shí)現(xiàn)船舶目標(biāo)屬性、類(lèi)型的判定[1]。船舶目標(biāo)特征隱藏于雷達(dá)回波中,通過(guò)對(duì)雷達(dá)回波的幅度和相位的處理、分析和變換,可得到雷達(dá)散射面積(RCS)及其統(tǒng)計(jì)特征、極化散射矩陣、散射中心分布等反映目標(biāo)固定特性的參數(shù)[2]。
船舶RCS與目標(biāo)的形狀、尺寸、材料的電磁參數(shù),入射波的頻率和波形,入射波和接收天線(xiàn)的極化形式以及目標(biāo)相對(duì)入射和散射方向的姿態(tài)角有關(guān)。所以,RCS測(cè)量數(shù)據(jù)起伏劇烈。如何從目標(biāo)RCS測(cè)量數(shù)據(jù)中發(fā)現(xiàn)目標(biāo)雷達(dá)起伏分布規(guī)律并提取目標(biāo)特征值,這對(duì)雷達(dá)有效探測(cè)、識(shí)別目標(biāo)非常重要。本文在對(duì)起伏劇烈的RCS測(cè)量數(shù)據(jù)進(jìn)行野值剔除和平滑簡(jiǎn)化處理基礎(chǔ)上,對(duì)RCS測(cè)量數(shù)據(jù)進(jìn)行統(tǒng)計(jì)特征描述,并基于BP神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)對(duì)不同工況船舶目標(biāo)識(shí)別。
1 船舶 RCS 統(tǒng)計(jì)特征分析
受海上電磁環(huán)境及雷達(dá)船舶目標(biāo)復(fù)雜結(jié)構(gòu)形狀等因素的影響,船舶目標(biāo)RCS具有一定程度的隨機(jī)性,需要采取特定方法提取RCS參量的特征信息。目前經(jīng)常使用的船舶目標(biāo)RCS統(tǒng)計(jì)數(shù)字模型參數(shù)包括最值、均值、極差、標(biāo)準(zhǔn)差、偏度系數(shù)、峰度系數(shù)等。均值主要用于描述目標(biāo)RCS的平均大小,極差、標(biāo)準(zhǔn)差用于表示目標(biāo)RCS的離散程度,偏度系數(shù)、峰度系數(shù)表征了船舶目標(biāo)RCS分布特點(diǎn)。同時(shí),為了避免RCS劇烈變化造成誤導(dǎo),還采取一些數(shù)據(jù)處理技術(shù)簡(jiǎn)化數(shù)據(jù),如概率密度分布(PDF)、累計(jì)概率分布(CDF)和百分概率值等[3]。
1.1 位置特征參數(shù)(均值、方差和極差)
均值:

標(biāo)準(zhǔn)差:

極差:

1.2 分布特征參數(shù)(偏度系數(shù)、峰度系數(shù))
偏度系數(shù):

峰度系數(shù):

1.3 分布分析(概率密度函數(shù)、累計(jì)分布函數(shù))
在RCS統(tǒng)計(jì)特征提取時(shí),除了分析RCS統(tǒng)計(jì)特征參數(shù)時(shí),還需將船舶目標(biāo)RCS的所有數(shù)據(jù)統(tǒng)一考慮,通過(guò)繪制概率密度函數(shù)(PDF)和累計(jì)分布函數(shù)(CDF)等分析RCS參數(shù)的幅值分布信息。

對(duì)于離散的RCS測(cè)量數(shù)據(jù),按如下方法計(jì)算:設(shè)船舶目標(biāo)的RCS最大值和最小值分別為和,將在第值段中,RCS出現(xiàn)的次數(shù)即為,從第1個(gè)值段到第個(gè)值段(包括第個(gè)值段)中RCS數(shù)據(jù)累計(jì)出現(xiàn)的次數(shù)記為,全扇區(qū)內(nèi)RCS數(shù)據(jù)個(gè)數(shù)的總和記為,離散數(shù)據(jù)的概率密度函數(shù)如式(7)所示。

累積分布函數(shù)定義為雷達(dá)散射截面低于或等于某個(gè)σ值的概率,它是由概率密度函數(shù)曲線(xiàn)積分而得,如式(8)所示。

對(duì)于離散的RCS測(cè)量數(shù)據(jù),采取類(lèi)似概率密度函數(shù)的計(jì)算方法,累計(jì)概率函數(shù)如式(9)計(jì)算求得。

1.4 百分概率值分布(10%概率值,50%概率值和90%概率值)
百分概率值為累計(jì)概率值CDF達(dá)到一定概率值的對(duì)應(yīng)的RCS幅度值。一般采用累計(jì)概率值為10%、50%和90%的RCS值作為統(tǒng)計(jì)分析參數(shù)。


百分概率值在統(tǒng)計(jì)分析中有時(shí)也常用10%和90%慨率的RCS值,分別記作和,分別如式(12)和式(13)所示。

采用式(11)類(lèi)似方法,可求得離散參數(shù)下達(dá)到10%和90%概率值的艦船RCS值。
2 基于 BP 神經(jīng)網(wǎng)絡(luò)的船舶目標(biāo)識(shí)別方法
2.1 BP神經(jīng)網(wǎng)絡(luò)
BP網(wǎng)絡(luò)是一種根據(jù)誤差值反向傳遞,運(yùn)用逆?zhèn)鞑ニ惴▉?lái)對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練的多層前饋型網(wǎng)絡(luò)。這種網(wǎng)絡(luò)模型有一個(gè)最大的有點(diǎn),就是它不需要事先知道相關(guān)的映射函數(shù)方程,就能學(xué)習(xí)和處理信息。這種網(wǎng)絡(luò)模型主要是基于最速下降法的原理,利用反向信息傳播來(lái)對(duì)網(wǎng)絡(luò)中的突觸權(quán)重和閾值進(jìn)行自行調(diào)整,最終使所得誤差的平方和最小。
BP網(wǎng)絡(luò)可分為正向信息傳遞和誤差值反向傳遞傳遞2部分。具體過(guò)程如圖1所示。外界信息傳遞給輸入層,而后輸入層將外界信息傳遞給中間隱含層,這些信息在各隱含層經(jīng)過(guò)處理后,最終傳遞給輸出層,輸出層則將這個(gè)結(jié)果輸出。
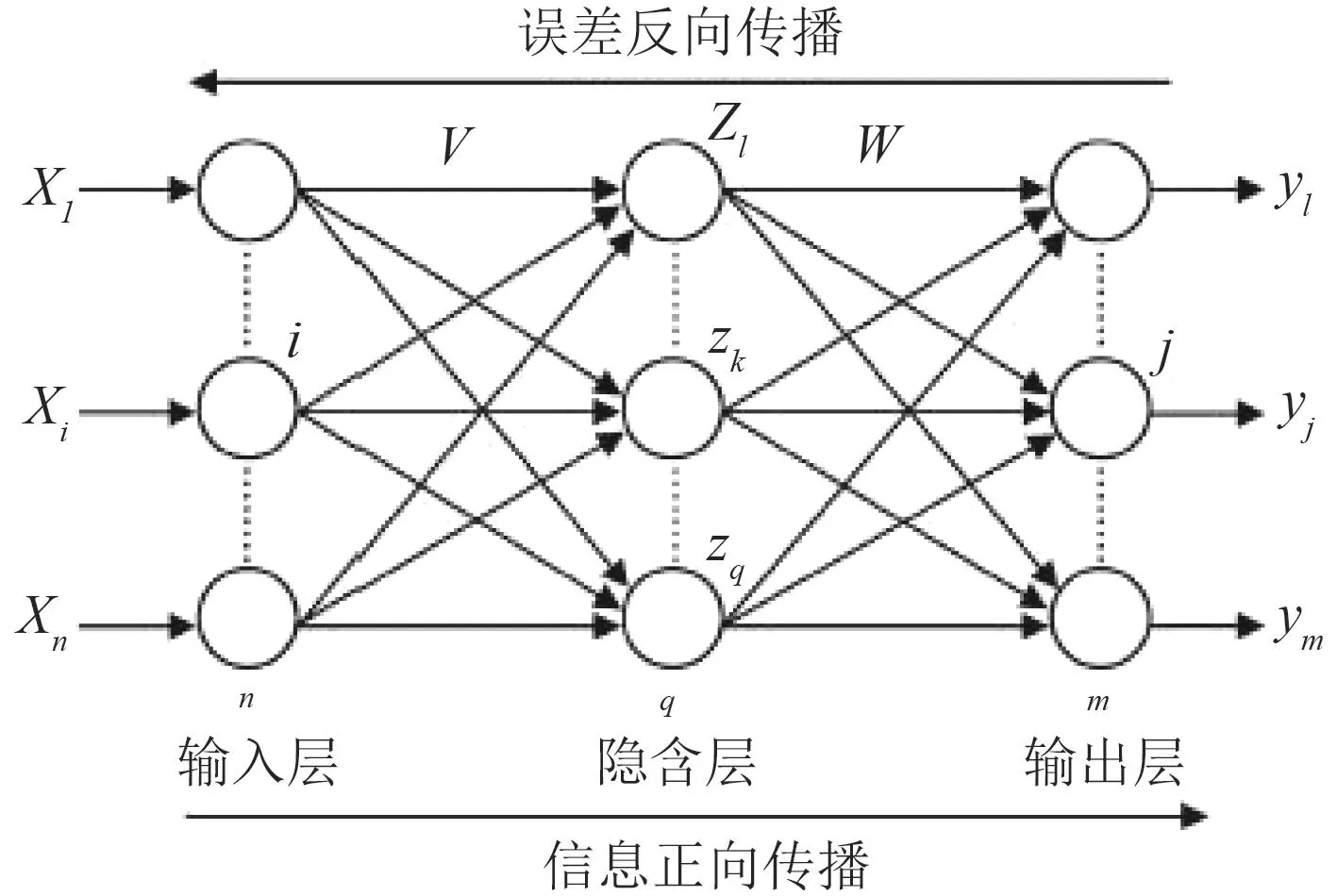
圖1 三層 BP 神經(jīng)網(wǎng)絡(luò)示意圖Fig.1 Diagram of BP Neural Networks with three layers
這時(shí)若輸出結(jié)果與期望不服時(shí),會(huì)在輸出層根據(jù)兩者的誤差調(diào)整突觸權(quán)重,接著則按照輸出層——隱含層——輸入層的方向反向一層一層的傳遞回去,如此反復(fù)來(lái)回傳遞,不斷調(diào)整神經(jīng)網(wǎng)絡(luò),直至誤差達(dá)到精度要求,或者達(dá)到設(shè)定的迭代次數(shù)[4,5]。
2.2 基于BP神經(jīng)網(wǎng)絡(luò)的船舶目標(biāo)識(shí)別
利用RCS統(tǒng)計(jì)特征進(jìn)行BP神經(jīng)網(wǎng)絡(luò)的船舶目標(biāo)識(shí)別方法主要包括特征提取和分類(lèi)判決2個(gè)環(huán)節(jié),特征提取采用本文第2部分的統(tǒng)計(jì)特征提取方法,分類(lèi)識(shí)別利用BP神經(jīng)網(wǎng)絡(luò)方法。樣本數(shù)據(jù)經(jīng)預(yù)處理、特征提取及變換后經(jīng)樣本學(xué)習(xí)得到目標(biāo)特征知識(shí)庫(kù);測(cè)量數(shù)據(jù)經(jīng)特征提取及變換后基于目標(biāo)特征知識(shí)庫(kù)經(jīng)BP神經(jīng)網(wǎng)絡(luò)完成船舶目標(biāo)識(shí)別,如圖2所示。
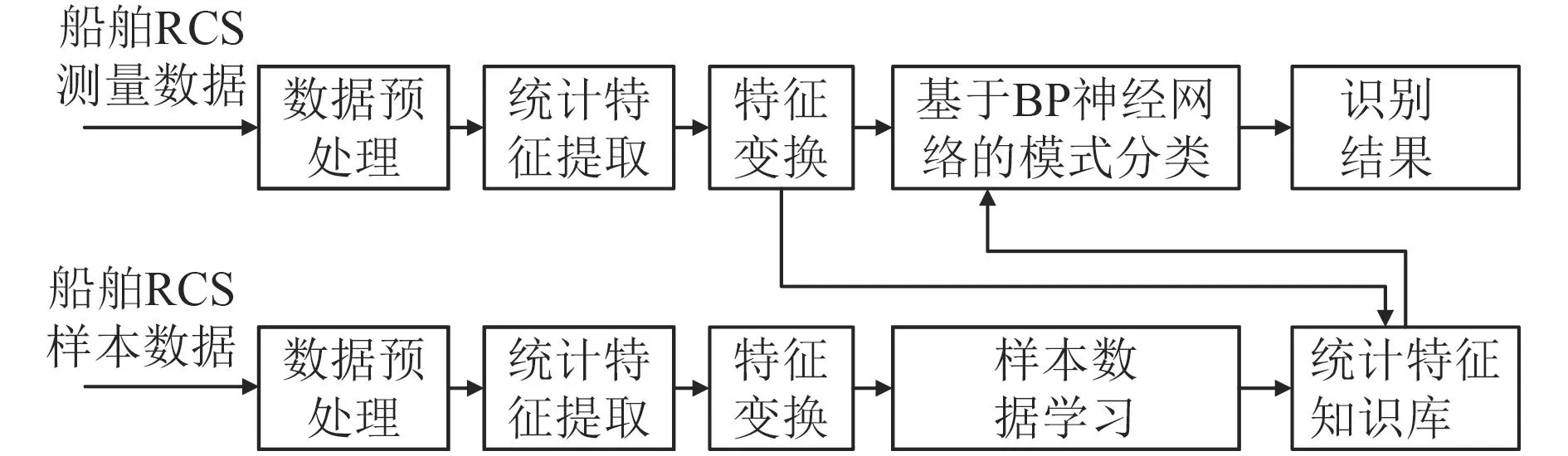
圖2 基于RCS統(tǒng)計(jì)特征的船舶目標(biāo)識(shí)別框圖Fig.2 The diagram of ship target identification based on statistical characteristics from RCS
3 數(shù)據(jù)分析驗(yàn)證
這里以某船在跟蹤雷達(dá)為10 GHz工作頻率下,距離雷達(dá)4.5 km時(shí)在360°方向的RCS數(shù)據(jù),如圖3所示。

圖3 某船的 RCS 數(shù)據(jù)Fig.3 The RCS data of a ship
為驗(yàn)證本文RCS參數(shù)統(tǒng)計(jì)特征在船舶目標(biāo)識(shí)別的有效性。這里根據(jù)測(cè)量獲取的艦艇不同工況下360°方向的100組RCS參數(shù)為基礎(chǔ),進(jìn)行統(tǒng)計(jì)特征提取及基于特征的識(shí)別。其中,工況1~工況6對(duì)應(yīng)的船舶目標(biāo)與雷達(dá)距離及雷達(dá)的工作參數(shù)如表1所示。
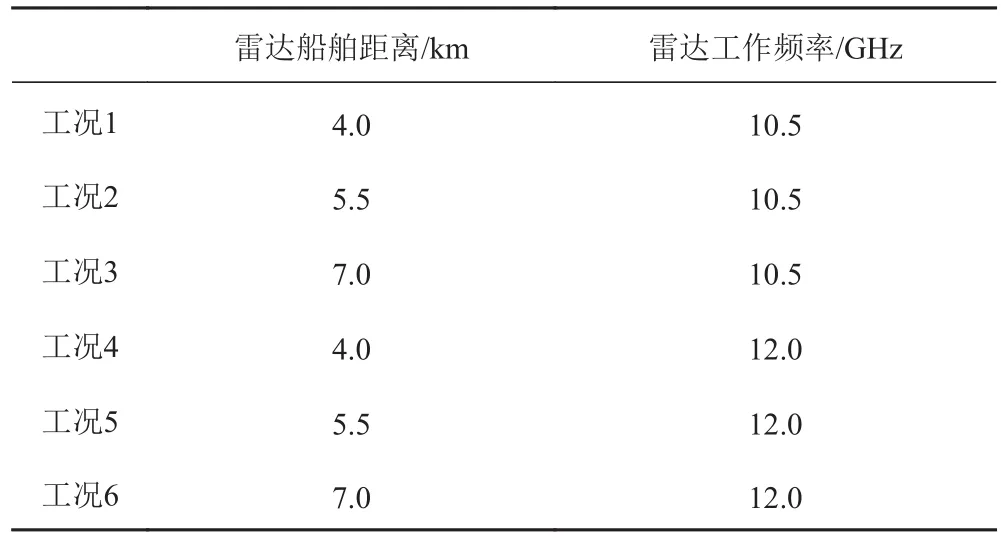
表1 不同工況下對(duì)應(yīng)的不同工作狀態(tài)Tab.1 Different working conditons corresponding to the different working conditions
本文采用Ploak-Ribiere共軛梯度法對(duì)不同工況下的船舶RCS參數(shù)進(jìn)行BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練。將不同工況下船舶在360°方向的每組RCS參數(shù)分為2組樣本,前50組作為訓(xùn)練樣本,后50組參數(shù)作為測(cè)試樣本。表2為工況1~工況6的不同樣本個(gè)數(shù)下的識(shí)別概率。
由上述結(jié)果可知,基于BP神經(jīng)網(wǎng)絡(luò)對(duì)船舶RCS參數(shù)統(tǒng)計(jì)特征分析,可得到識(shí)別率為90%以上的識(shí)別效果,甚至可以完全識(shí)別。總體而言,對(duì)于多數(shù)工況,當(dāng)樣本數(shù)目增大時(shí),其識(shí)別率也有所提升。
4 結(jié) 語(yǔ)
船舶目標(biāo)RCS包含了豐富的目標(biāo)特征信息,但由于船舶目標(biāo)結(jié)構(gòu)、形狀復(fù)雜,電磁散射機(jī)理復(fù)雜及雷達(dá)探測(cè)角度及所在海域電磁環(huán)境等因素的影響,船舶的RCS呈現(xiàn)明顯的起伏變化特性。本文提取了船舶目標(biāo)RCS參量的多個(gè)統(tǒng)計(jì)特征數(shù)據(jù),最后基于統(tǒng)計(jì)數(shù)據(jù)利用BP神經(jīng)網(wǎng)絡(luò)識(shí)別船舶目標(biāo)。實(shí)測(cè)數(shù)據(jù)表明,該方法提取了船舶目標(biāo)RCS參數(shù)的有效統(tǒng)計(jì)特征,取得了較好的識(shí)別分類(lèi)效果,可實(shí)現(xiàn)對(duì)若干工況下不同類(lèi)型船舶的精準(zhǔn)識(shí)別。

表2 不同工況下不同樣本數(shù)下的識(shí)別概率統(tǒng)計(jì)表Tab.2 Statistial table of recognition probability under different conditions
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
河南科技(2014年23期)2014-02-27 14:19:15