移相全橋變換器在電動汽車充電單元中的應用
2018-07-31 07:36:32張振東
能源研究與信息 2018年2期
仇 杰,張振東
(1. 上海理工大學,機械工程學院,上海 200093;2. 上汽集團乘用車技術中心,上海 201804)
大容量電池技術和高性能驅動電機技術的不斷進步,推動了電動汽車行業的深入發展和商品化進程。伴隨著電動汽車保有量的不斷增加,電動汽車充電站的需求也在日益擴大。充電單元將電動汽車與充電站連接,并對電動汽車的整個充電過程進行實時控制。如何設計響應迅速、充電過程平穩的充電單元已經成為電動汽車廠商和科研院所的重要研究課題。
針對電動汽車充電方法,國內科研單位已經展開了許多研究工作。徐偉等[1]針對電動汽車高功率因數的充電要求,開發了一種具有功率因數校正功能的電動汽車充電系統,并運用 Saber軟件對所設計的充電單元進行了仿真,驗證了其達到了較好的效果。朱光歡等[2]利用CAN總線實現充電單元和電池組控制器的通訊交互,設計了實時監控電池組狀態的控制單元,實現了一種智能充電方式。胡超等[3]則通過模塊化結構設計的方法開發了一種直流充電單元,并進行了工程應用。甘屹等[4]設計了電池均衡充電方案,補償了電池容量的差異性。近年來,國內很多學者對電動汽車充電單元進行了詳盡的研究,并獲得了較好的研究成果[5-8]。
電動汽車充電單元的核心電源變換器作為電能變換的關鍵技術,一直受到國外科研人員的重視。Gorla等[9]利用輔助電流系統設計了一個移相全橋DC–DC變換器,實現了變換器主動軟開關的功能[9]。Vlatko 等[10]針對移相全橋變換器在小信號情況下進行了詳細的分析。王均等[11]則通過建立變換器離散域數學模型,分析了影響移相全橋系統穩定性的因素,并基于補償網絡的設計方法,實現了一種直接數字式峰值電流控制模式的全橋變換器。
本文從電動汽車充電單元的工作原理出發,詳細分析基于峰值電流控制模式的移相全橋電源變換器和補償網絡的基本理論及其在電動汽車上的應用。以PIC16F887單片機為核心設計一套電動汽車充電控制單元,并最終通過實驗對比驗證該方法的可行性。
1 充電單元基本工作原理
本文設計的電動汽車充電控制單元采用基于峰值電流控制模式的移相全橋變換器,其基本原理如圖1所示,圖中:Q1~Q6均表示MOS管即晶體管;RLD為電阻;C1~C6、Cf均表示電容;Lr、Lp、Ls1、Ls2、Lf均表示電感。該電路包括兩部分:①移相全橋全波整流電路;②峰值電流 Buck 降壓電路[12]。
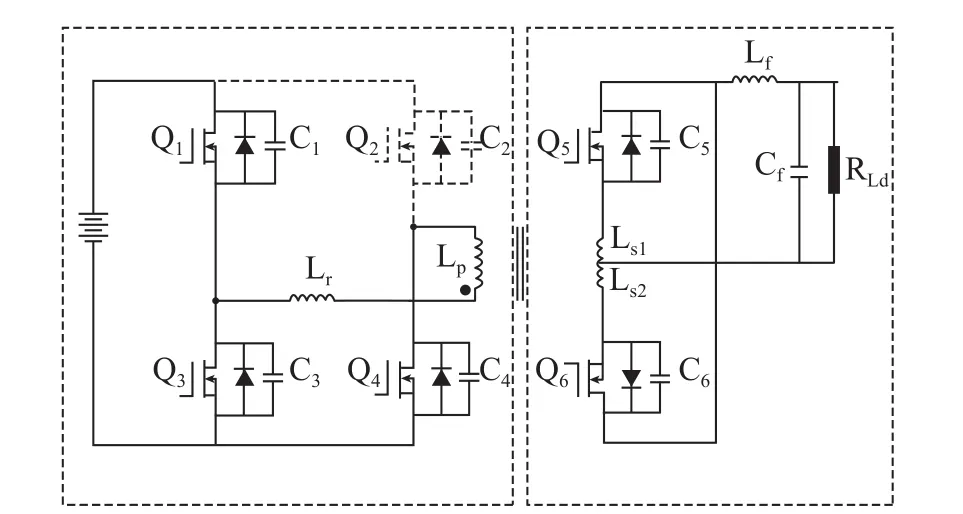
圖1 峰值電流模式移相全橋變換器原理圖Fig.1 Phase-shift full bridge converter based on peak current mode
1.1 移相全橋全波整流電路原理分析
在一個完整的運行周期中,移相全橋全波整流電路共有12種模態變換。由于前半周期的模態變化與后半周期的運行原理基本相同,因此只討論半周期的模態變換情況。圖2為移相全橋全波整流電路全周期內信號的主要波形圖,圖中:ip為原邊電流;Vin為內部電壓;Vrect為整流器電壓;t為時間。
模態0(0~t0時刻):該時刻電路運行狀態如圖3(a)所示,MOS管Q1、Q4導通,原邊電流ip流動方向為此時MOS管 Q5導通,副邊電流 if流動方向為
模態1(t0~t1時刻):t0時刻后關斷Q1,原邊電流ip由Q1中轉移到電容C1和C3中,其中電路對C1進行充電,C1其電壓由0 V逐步上升,而電容C3隨著放電逐步變小,此時Q1因零電壓關斷。
在 t1時刻,當 C3的電壓下降到 0 V后,Q3的反向二極管D3導通,此時模態1的過程結束。這一模態變換過程中電路運行如圖3(b)所示。
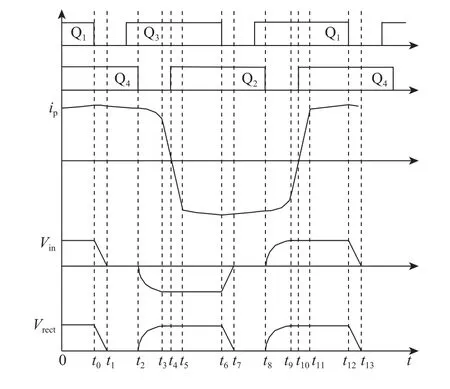
圖2 移相全橋全波整流電路全周期內信號主波形示意圖Fig.2 Main waveform of full wave rectifier circuit with phase-shift full-bridge in the full cycle
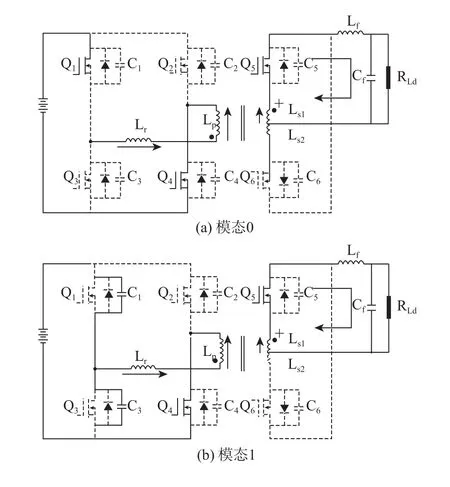
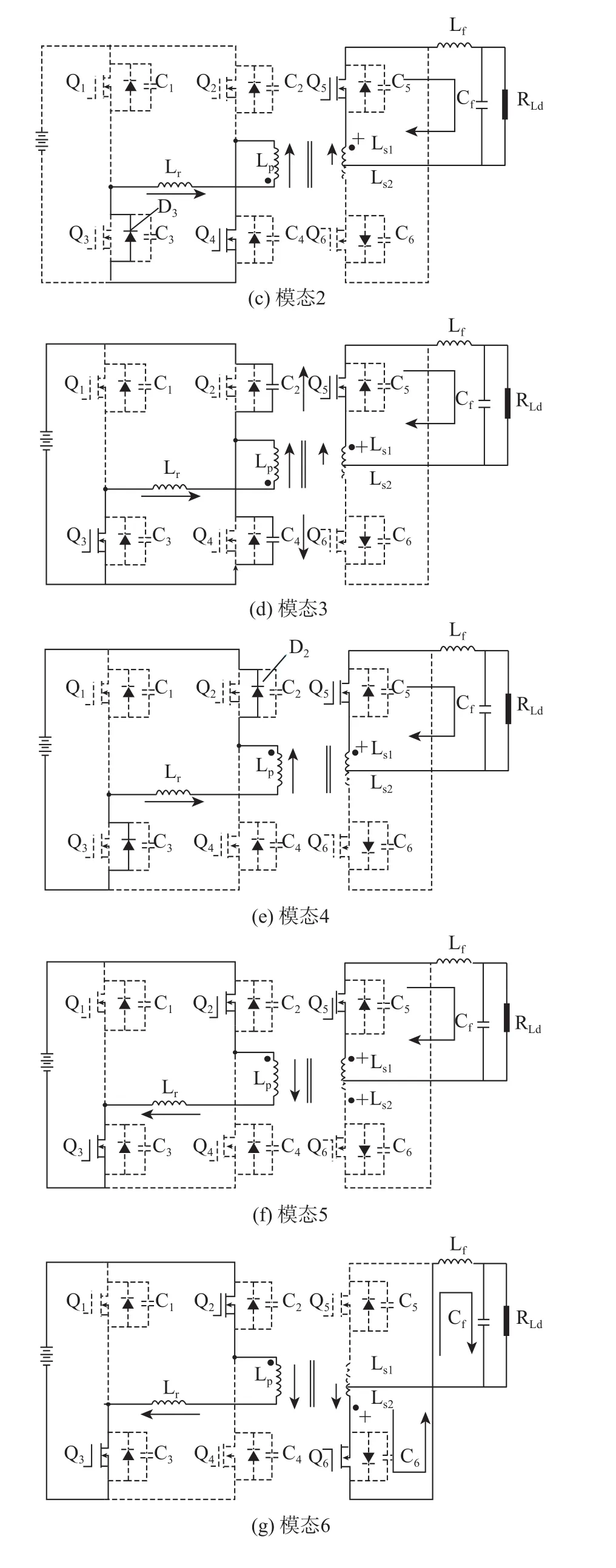
圖3 各模態電路運行狀態圖Fig.3 Modes of the circuit run-state
模態 2(t1~t2時刻):如圖 3(c)所示,此時MOS管Q3、Q4導通。但由于二極管D3作用,此時Q3是零電壓開啟,因此雖然Q3導通,但是電流仍然由D3傳遞,此時Q3沒有電流經過。
模態3(t2~t3時刻):在t2時刻,Q4關斷。此時原邊電流ip由Q4轉移到電容C2和C4,此時C2逐漸放電,C4處于充電過程。由于電容C4的作用,Q4在這一過程中處于零電壓關斷過程,如圖 3(d)所示。
模態 4(t3~t4時刻):在 t3時刻,二極管D2導通,此時Q2是零電位,因此此時閉合Q2為零電壓閉合。由于D2作用,此時Q2沒有電流經過。ip經D2流通。達到t4時刻,原邊電流從ip下降到零,D2和D3由于壓降作用自然斷開,Q2和Q3由于電源壓降作用重新導通,原邊電流ip經過,如圖3(e)所示。
模態5(t4~t5時刻):在t4時刻,原邊電流正向導通,但是此原邊電流不足以提供副邊負載電流,導致負載電流依然由兩個整流二極管提供運行回路。直至t5時刻后,所有負載電流流過D6,模態5運行結束,如圖3(f)所示。
模態 6(t5~t6時刻):如圖 3(g)所示,此時Q2、Q3接通,為原邊提供穩定電流,MOS管Q6的關閉為副邊整個回路提供負載電流,并在t6時刻完成半周期的模態狀態切換。變換器另一個半周期的變化可以依據以上模態變換進行分析,完成移相全橋全波整流的變換過程。其原邊和副邊的信號具體變化如圖2所示。
1.2 峰值電流型 Buck 降壓電路工作原理
圖4為峰值電流控制型Buck降壓電路示意圖。工作過程中,變換器的輸出電壓v(t)同設定的參考電壓Vref進行比較。該對比信號的誤差經過放大處理,作為輸出量控制峰值電流的控制指令vc(t)。將主回路采樣電阻測得的電感電流轉化的電壓信號(iL× R),并與 vc(t)進行比較。最終和時鐘頻率共同作用,通過脈沖置位RS觸發器,控制功率開關Q的通斷,最終調節電感電流的變化。其電路運行中電感電流變化過程如圖5所示,圖中:U為電壓表;u為最終的控制電壓。
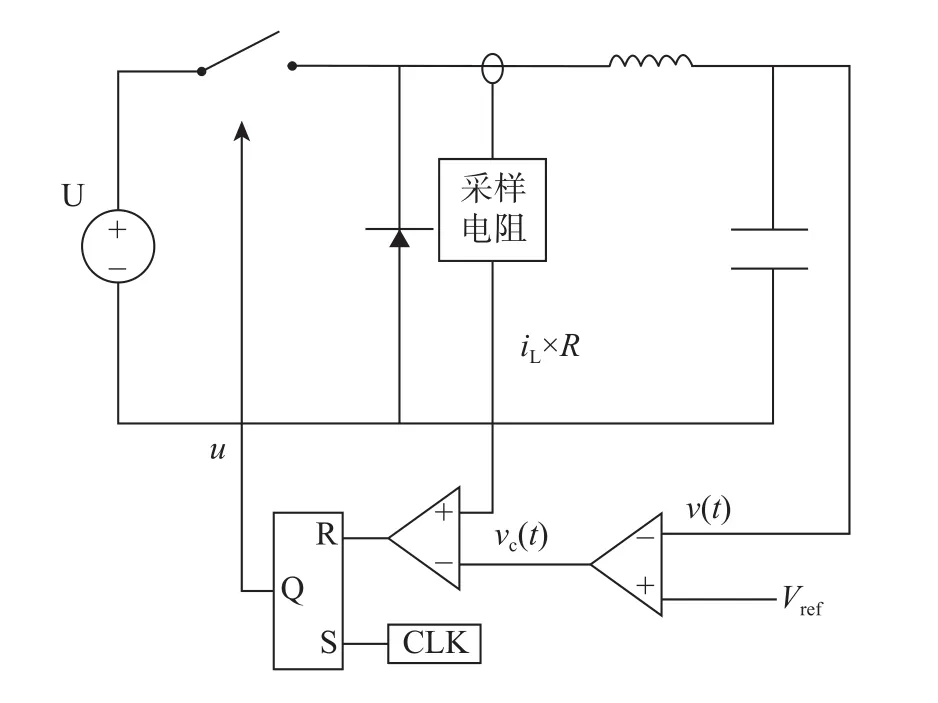
圖4 峰值電流控制型 Buck 降壓電路示意圖Fig.4 Buck circuit based on peak current control
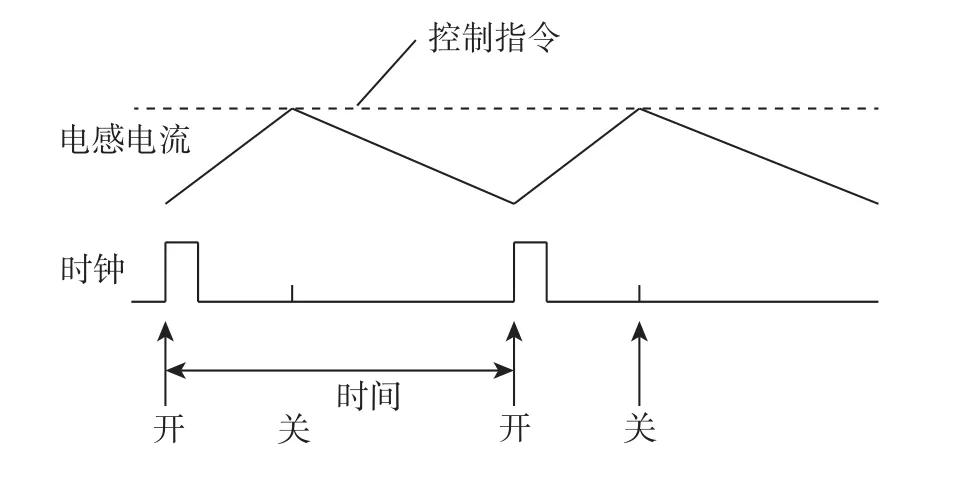
圖5 Lf 電感電流變化示意圖Fig.5 Changes of Lf inductor current
當iL× R大于電流控制信號時,比較器翻轉,控制功率開關Q斷開,電感L通過二極管的電流呈下降趨勢,直至下一個時鐘周期開始在此翻轉調節。
2 基于串聯雙閉環控制算法分析及斜坡補償網絡設計
2.1 串聯雙閉環控制算法
根據前文所述的電路工作原理,本文設計了一套基于電壓反饋外環主回路、電流反饋內環副回路的串級PID控制器。雙閉環串級PID控制電路的結構如圖6所示,圖中Rsc為電阻。當控制系統輸入參考電壓Vref后,與副邊采樣得到的實時電壓對比得到誤差e1,將其作為外環電壓環PID控制器的輸入信號進行調節。控制輸出信號則作為副回路電流環控制器的參考輸入,與原邊采樣電阻得到的控制電流進行比較,得到內環的控制誤差e2,再將其并輸入PID控制器進行內環調節,最終達到輸出和輸入完全相等。

圖6 雙閉環串級 PID 控制電路Fig.6 Cascade PID control circuit with double closed-loop
2.2 斜坡補償網絡設計
由文獻[14]可知,擾動狀態下副邊電感電流與控制輸入信號占空比的關系為

當占空比小于0.5時,系統穩定;當占空比大于0.5時,系統隨時間變化變得不穩定。電感電流不穩定情形如圖7所示,圖中:ic為控制電流;T為周期。因此,為了解決占空比大于0.5時電感電流不穩定的問題,需要為擾動系統加入斜坡補償以使其達到穩定狀態。
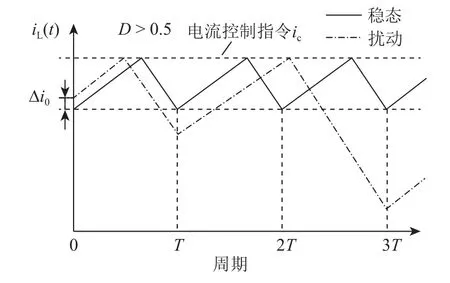
圖7 電感電流不穩定情形Fig.7 Instability of inductor current
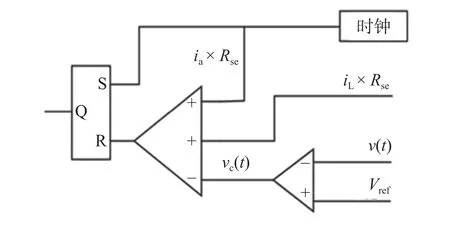
圖8 帶斜坡補償的峰值電流控制電路Fig.8 Peak-current control circuit with slope compensation
設計如圖8所示的具有斜坡補償的峰值電流控制電路。斜坡補償信號實質為一個頻率等于變換器的開關頻率的周期性鋸齒波電流控制信號ia(t)。與圖4相比,圖8中加入了一個ia× Rse的斜坡補償信號。引入該斜坡信號后,將電感電流信號iL和一個以初始值為ic、斜率為鋸齒波下降斜率相同的修正信號進行比較,最終輸出控制信號,使補償后的電感電流趨于穩定。補償后的擾動電流變化趨勢如圖9所示。
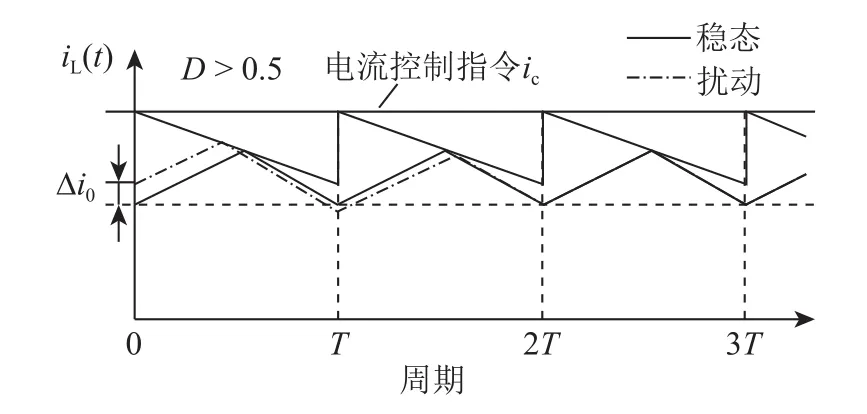
圖9 斜坡補償后穩定的電感電流波形Fig.9 Stable waveform of inductor current with slope compensation
3 實驗驗證
為了驗證上述方法的可行性,以PIC16F887單片機為核心,開發了一套電動汽車充電控制單元實驗樣機,并通過實驗測試驗證基于峰值電流控制模式的移相全橋變換器方案的可行性。
該電動汽車充電單元結構示意圖如圖10所示。該單元由控制芯片、移相全橋全波整流變換器、系統供電單元以及其他電氣輔件組成,能夠實現漏電檢測、過壓欠壓信號檢測等功能。
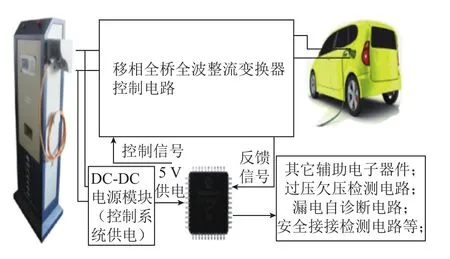
圖10 電動汽車充電單元總體結構示意圖Fig.10 Overall structure of the charging unit for electric vehicle
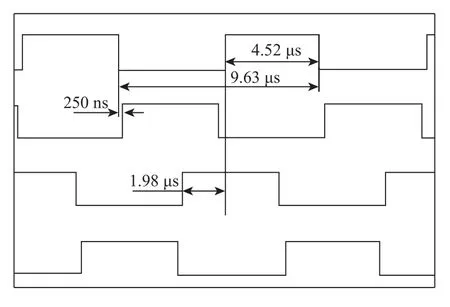
圖11 主邊 Q1–Q4 驅動信號波形Fig.11 Waveform of main-side driving signal Q1-Q4
圖11為主邊MOS管Q1至Q4的控制信號波形。由圖中可以看出,MOS管驅動頻率為103.8 kHz,死區時間為 250 ns,前后橋臂的移相時間為1.98 μs。該電路可以較好地實現全橋移相整流的功能。
4 結 論
(1)與傳統的基于電壓單閉環反饋控制開關變換器相比,峰值電流控制型開關變換器的多環反饋控制結構具有逐周限流保護的功能,可使系統獲得更高的可靠性、更好的電壓調整率。
(2)基于斜坡補償的控制系統能夠有效解決輸入控制信號占空比大于50%時,副邊電路電感電流不穩定的問題。這種補償方法極大拓展了基于電流控制式移相全橋全波整流開關變換器的整流能力,使其在電動汽車充電單元中的應用得以實現。
(3)基于峰值電流模式的移相全橋變換器電動汽車充電單元具有充電過程電流穩定、充電速度快等優點。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
