兩柱掩護(hù)式液壓支架承載特性研究
2018-08-02 01:32:18韓進(jìn)軍
機(jī)械管理開(kāi)發(fā) 2018年7期
韓進(jìn)軍, 王 彪
(1.潞安集團(tuán)常村煤礦, 山西 屯留 046100; 2.潞安集團(tuán)安監(jiān)局, 山西 襄垣 046299)
引言
在以往研究中只是單一分析支架理想水平位時(shí)的受力狀況,且忽略掩護(hù)梁受力對(duì)頂梁合力作用點(diǎn)位置及大小造成的影響,然而實(shí)際工況中,支架姿態(tài)往往會(huì)隨圍巖運(yùn)移及周期來(lái)壓等地質(zhì)現(xiàn)象的發(fā)生而改變,掩護(hù)梁也會(huì)承受后部垮落矸石的壓力,上述研究方法不能準(zhǔn)確求出支架不同姿態(tài)下頂梁合力作用點(diǎn)的位置及大小,繼而無(wú)法確定當(dāng)前姿態(tài)下支架頂梁合力作用點(diǎn)的合理受力區(qū)間,不能提出有效的姿態(tài)調(diào)整策略。因此,為了及時(shí)了解支架與圍巖相互作用關(guān)系,維護(hù)圍巖穩(wěn)定,保證工作面設(shè)備的安全生產(chǎn),有必要對(duì)支架不同姿態(tài)下的頂梁承載特性開(kāi)展深入研究[1]。
1 液壓支架受力分析
1.1 支架平面力學(xué)模型建立
本文構(gòu)建了支架平面力學(xué)模型,并充分考慮掩護(hù)梁受力對(duì)支架頂梁合力作用點(diǎn)帶來(lái)的影響,該模型可描述兩柱掩護(hù)式液壓支架在縱向平面內(nèi)任意姿態(tài)下的受力狀況,如圖1所示[2]。

圖1 支架平面受力圖
其中:O為參考坐標(biāo)點(diǎn),O1為支架四連桿機(jī)構(gòu)運(yùn)動(dòng)瞬心,G為頂梁與掩護(hù)梁鉸接點(diǎn),Q為垂直于頂梁的載荷(即支架頂梁承載力)、XQ為G點(diǎn)到承載力作用線的距離,Qf為頂板對(duì)支架的摩擦阻力(摩擦系數(shù)f一般為0.1~0.3),P為立柱的工作力,PE為平衡千斤頂?shù)墓ぷ髯枇Γó?dāng)活塞腔受壓時(shí)PE取“+”,當(dāng)活塞桿腔受壓時(shí)PE取“-”),r1為O1點(diǎn)到G點(diǎn)所在直線距離,r2為O1點(diǎn)到頂梁所在直線距離,r3為O1點(diǎn)到立柱所在直線距離,r4為O1點(diǎn)到平衡千斤頂所在直線距離,r5為G點(diǎn)到立柱所在直線距離,r6為G點(diǎn)到平衡千斤頂所在直線距離,F(xiàn)為掩護(hù)梁所承受作用載荷(分解為水平方向FX和豎直方向FY),LF為掩護(hù)梁作用載荷到下鉸點(diǎn)的距離,F(xiàn)1、F2分別為前連桿和后連桿所受作用力,α、β、γ分別為頂梁、后連桿、底座與水平面的夾角,H、X、Y及各鉸接點(diǎn)坐標(biāo)為因變量,構(gòu)建如下運(yùn)動(dòng)方程組,其中K1~K18為中間變量,其中各力與角度的正方向如圖1所示。
1.2 合力作用點(diǎn)計(jì)算
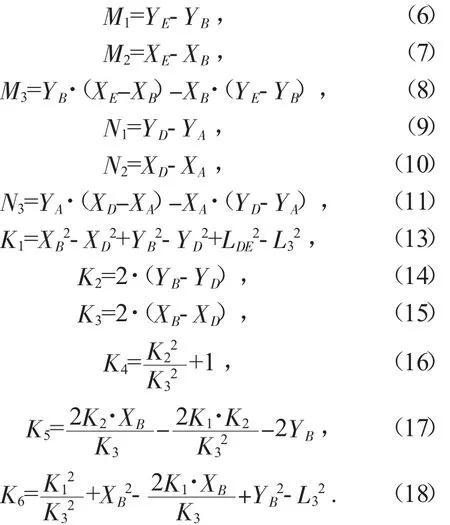
本文對(duì)支架的運(yùn)動(dòng)學(xué)特性進(jìn)行了分析,并推導(dǎo)出了基于頂梁、底座、后連桿三傾角傳感器的兩柱掩護(hù)式液壓支架姿態(tài)算法,利用該算法可對(duì)A、B、D、E點(diǎn)坐標(biāo)進(jìn)行求解,通過(guò)計(jì)算其結(jié)果表示如下[3]:

作BE與AD的延長(zhǎng)線使其交于O1點(diǎn),如圖1所示,則依據(jù)理論力學(xué)相關(guān)定理可知O1點(diǎn)為支架四連桿機(jī)構(gòu)的運(yùn)動(dòng)瞬心,在已知A、B、D、E點(diǎn)坐標(biāo)前提下,可進(jìn)一步求解瞬心O1點(diǎn)坐標(biāo),其結(jié)果表示如下:

其中:
1)若不考慮掩護(hù)梁受力,則:
以頂梁、掩護(hù)梁為隔離體,對(duì)瞬心O1點(diǎn)取力矩平衡方程:
以頂梁為隔離體,對(duì)G點(diǎn)取力矩平衡方程:

聯(lián)立求解可得:

式中:f為頂板與頂梁之間的摩擦系數(shù),取0.1~0.3。
2)若考慮掩護(hù)梁受力,則:
以頂梁、掩護(hù)梁為隔離體,對(duì)瞬心O1點(diǎn)取力矩平衡方程:

a為GX作用點(diǎn)與瞬心O1之間的距離,其值可表示為:

b為作用點(diǎn)GY與瞬心O1之間的距離,其值可表示為:

以頂梁為隔離體,對(duì)G點(diǎn)取力矩平衡方程為:

聯(lián)立求解可得:

通過(guò)上述計(jì)算可確定支架在任意姿態(tài)下頂梁所承受載荷的大小及作用位置,為對(duì)支架姿態(tài)與頂梁承載特性關(guān)系的進(jìn)一步分析提供了研究基礎(chǔ)。
2 液壓支架承載特性分析
本節(jié)將利用matlab軟件以掩護(hù)梁受力、支架高度、頂梁傾角三個(gè)影響因素為方向?qū)χЪ艹休d特性的變化加以論述。
2.1 掩護(hù)梁受力對(duì)支架承載性能的影響分析
假設(shè)上頁(yè)圖 1中 α、β、γ 分別等于 0°、60°、0°,將支架合力作用點(diǎn)計(jì)算公式編寫(xiě)為matlab可執(zhí)行代碼,利用繪圖功能繪制不同受力狀態(tài)下支架的承載性能曲線。
將不考慮掩護(hù)梁受力與不考慮掩護(hù)梁受力兩曲線疊加分析,如圖2所示。

圖2 掩護(hù)梁受力對(duì)支架承載性能影響曲線
對(duì)考慮掩護(hù)梁受力及不考慮掩護(hù)梁受力兩種狀態(tài)時(shí)支架承載特曲線做比較,可知當(dāng)掩護(hù)梁承受一定載荷時(shí),支架承載特性曲線向左上方偏移,頂梁承受外部載荷及平衡千斤頂受拉工作區(qū)的承載能力均略有增加,但平衡千斤頂受壓工作區(qū)的承載能力略有下降,支架易出現(xiàn)低頭現(xiàn)象。因此,在實(shí)際生產(chǎn)中,當(dāng)支架掩護(hù)梁承受載荷時(shí),應(yīng)避免支架低頭,并對(duì)已經(jīng)低頭的支架活塞腔及時(shí)補(bǔ)壓或進(jìn)行其他輔助措施,提高支架前端的支護(hù)能力。
2.2 支架高度對(duì)支架承載性能的影響分析
假設(shè)支架頂梁、底座處于水平狀態(tài),對(duì)前述matlab可執(zhí)行代碼進(jìn)行修改,繪制支架處于不同高度時(shí)的支架承載特性曲線。
將三組曲線疊加分析,如下頁(yè)圖3所示。

圖3 不同支架高度對(duì)支架承載性能影響曲線
通過(guò)對(duì)上圖中三組曲線作對(duì)比分析可知,該型支架在頂梁底座水平,由低位升至高位的過(guò)程中,支架承載性能曲線向左上方移動(dòng),平衡千斤頂受拉工作區(qū)變化較小可忽略不計(jì)而受壓工作區(qū)承載能力則顯著提升,立柱工作區(qū)變長(zhǎng)且承受外部載荷能力增加。由此可見(jiàn),該型支架在實(shí)際工作中,處于高位態(tài)時(shí)的工作姿態(tài)可以提升支架的承載能力,增大立柱工作區(qū)間,提高支架穩(wěn)定性,同時(shí)也可提高支架前端的支護(hù)能力,有利于防止低頭現(xiàn)象的出現(xiàn)。
2.3 頂梁傾角對(duì)支架承載性能的影響分析
假設(shè)支架底座水平,立柱伸長(zhǎng)量為固定值,對(duì)前述matlab可執(zhí)行代碼進(jìn)行修改,繪制支架頂梁不同傾角時(shí)的支架承載特性曲線。
將三組曲線疊加分析,如圖4所示。
對(duì)比圖中三條曲線可知,支架立柱伸長(zhǎng)量為定值、底座水平時(shí),支架承載性能會(huì)隨頂梁傾角的改變而發(fā)生變化。當(dāng)頂梁呈現(xiàn)抬頭狀態(tài)時(shí),支架承載性能曲線向右上方移動(dòng),支架承受外載能力增強(qiáng),立柱主平衡區(qū)向頂梁后端移動(dòng),平衡千斤頂受拉工作區(qū)即頂梁后端承載能力增強(qiáng),有利于阻止頂梁的進(jìn)一步抬頭;當(dāng)頂梁呈現(xiàn)低頭狀態(tài)時(shí),支架承載性能曲線向左下方移動(dòng),支架承受外載能力略有降低,立柱主平衡區(qū)向頂梁前端移動(dòng),但平衡千斤頂受壓工作區(qū)即頂梁前端承載能力增強(qiáng),有利于阻止頂梁的進(jìn)一步低頭。

圖4 頂梁支架承載性能曲線
3 結(jié)論
通過(guò)從掩護(hù)梁受力、支架高度、頂梁傾角三個(gè)方面對(duì)影響支架承載性能的因素進(jìn)行直觀的圖形曲線分析,可知三者對(duì)支架的承載性能有著重要的影響。在實(shí)際工況中應(yīng)充分考慮掩護(hù)梁受力、支架姿態(tài)及工作高度,對(duì)已處于平衡千斤頂最大受拉及受壓極限狀態(tài)的支架做調(diào)整,使其盡可能工作于立柱主平衡區(qū),提高支架承載能力及穩(wěn)定性。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2014年4期)2014-12-27 13:44:20
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
航天器工程(2014年5期)2014-03-11 16:35:55
