微納加工的二軸快刀伺服器拓樸結(jié)構(gòu)優(yōu)化設(shè)計(jì)*
2018-08-07 09:46:16周歡偉邱玉良陳新度
機(jī)電工程技術(shù) 2018年7期
關(guān)鍵詞:變形
周歡偉,邱玉良,陳新度
0 引言
隨著對(duì)光學(xué)微結(jié)構(gòu)的要求提高,其自由曲面的加工精度顯得越來(lái)越重要。快刀伺服器作為宏微復(fù)合平臺(tái)中超精密加工微動(dòng)平臺(tái),主要用于光學(xué)微結(jié)構(gòu)模具的微陣列自由曲面結(jié)構(gòu)有其特定的效果。但是,壓電陶瓷的頻率越高,在相同電壓驅(qū)動(dòng)下,產(chǎn)生變形量越小,使快刀伺服器加工效率較為低下。為了解決這類矛盾,國(guó)內(nèi)外研究者提出設(shè)計(jì)放大位移機(jī)構(gòu)的策略,如Scott-Russell機(jī)構(gòu)、杠桿式放大機(jī)構(gòu)、壓曲放大機(jī)構(gòu)等。Niezrecki,C.等人[1]在1996年根據(jù)三角能放大位移的特點(diǎn),設(shè)計(jì)了一種壓曲放大式的柔性鉸鏈,其能放大壓電陶瓷產(chǎn)生的微位移,并且近年來(lái),此機(jī)構(gòu)已經(jīng)被大量運(yùn)用[2]。沈劍英等[3]在2013年利用杠桿原理,設(shè)計(jì)出了一種杠桿式柔性鉸鏈機(jī)構(gòu),將其運(yùn)用到實(shí)驗(yàn)后,獲得了機(jī)構(gòu)誤差為1.3%的精密放大位移機(jī)構(gòu)。上述快刀伺服器大都是一維快刀伺服器,只能做1個(gè)自由度的勻速進(jìn)給運(yùn)動(dòng),二維快刀伺服器是通過(guò)2軸實(shí)現(xiàn)二維自由度運(yùn)動(dòng),其具有以下優(yōu)勢(shì):(1)由于具有二軸同時(shí)運(yùn)動(dòng)的能力,在機(jī)床X向與Z方向上,利用二軸自由度的靈活性,獲得FTS在高頻運(yùn)動(dòng)時(shí)使刀尖點(diǎn)能根據(jù)微結(jié)構(gòu)的自由曲面形狀有效補(bǔ)償加工,獲得超精密的自由曲面微結(jié)構(gòu);(2)二軸快刀伺服器能改變傳統(tǒng)一軸快刀伺服器的驅(qū)動(dòng)方式,由于增加了主運(yùn)動(dòng),其靜力學(xué)模型和動(dòng)力學(xué)模型發(fā)生明顯的改變,利用二軸控制靈活的特點(diǎn),能實(shí)現(xiàn)快刀伺服器在加工過(guò)程時(shí)的閉環(huán)控制,進(jìn)一步提高超精密加工的質(zhì)量。
由于壓電陶瓷驅(qū)動(dòng)快刀伺服器工作行程短,國(guó)內(nèi)尚無(wú)位移達(dá)到900μm,頻率達(dá)到2 kHz的快刀伺服器報(bào)道。本文旨在通過(guò)設(shè)計(jì)兼顧位移和頻率,且能有效加工優(yōu)質(zhì)自由曲面的二維快刀伺服器,研究柔性鉸鏈的結(jié)構(gòu)尺寸對(duì)剛度的影響,獲得可用于加工微納結(jié)構(gòu)的新型快刀伺服器。
1 總體結(jié)構(gòu)布局
宏微復(fù)合平臺(tái)由宏平臺(tái)帶動(dòng)微平臺(tái)運(yùn)動(dòng)組成,微平臺(tái)安裝在宏平臺(tái)上,微平臺(tái)利用安裝在同一個(gè)中心軸的2個(gè)壓電陶瓷,使微平臺(tái)分為沿X軸方向運(yùn)動(dòng)的機(jī)構(gòu)和沿Y軸方向運(yùn)動(dòng)的機(jī)構(gòu),實(shí)現(xiàn)二維運(yùn)動(dòng)。二維快刀伺服器由柔性鉸鏈聯(lián)接,如圖1所示,利用1個(gè)壓電陶瓷,通過(guò)壓電陶瓷驅(qū)動(dòng)X軸柔性鉸鏈平臺(tái);4個(gè)分離式柔性鉸鏈將X軸柔性鉸鏈平臺(tái)連接在固定座上,利用1個(gè)壓電陶瓷驅(qū)動(dòng),實(shí)現(xiàn)Y軸的進(jìn)給。金剛石刀具固定在X軸柔性鉸鏈平臺(tái)的X方向的活動(dòng)端,X軸柔性鉸鏈平臺(tái)的X方向一端與第2個(gè)壓電陶瓷的一端固定,另一端活動(dòng),當(dāng)壓電陶瓷在電壓的作用下增長(zhǎng)時(shí),在鉸鏈桿的帶動(dòng),使半圓角柔性鉸鏈變形,使另一端活動(dòng)帶動(dòng)金剛石刀具運(yùn)動(dòng)。本設(shè)計(jì)可實(shí)現(xiàn)2軸同時(shí)高頻運(yùn)動(dòng),達(dá)到放大壓電陶瓷微動(dòng)輸出位移,滿足高頻響、高加速度、高精度的加工要求。
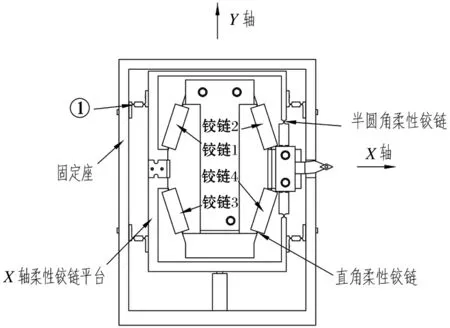
圖1 二軸快刀伺服器布局圖Fig.1 Layout of Twoaxis FTS
2 二軸的關(guān)鍵結(jié)構(gòu)設(shè)計(jì)
2.1 X軸柔性鉸鏈平臺(tái)關(guān)鍵結(jié)構(gòu)設(shè)計(jì)
上驅(qū)動(dòng)桿固定在X軸柔性鉸鏈平臺(tái)上,下驅(qū)動(dòng)桿與上驅(qū)動(dòng)桿對(duì)稱安裝在X軸柔性鉸鏈平臺(tái)上,中間空置位置固定壓電陶瓷的兩端,通過(guò)連接件固定在X軸柔性鉸鏈平臺(tái)上。當(dāng)壓電陶瓷1受電壓的作用時(shí),壓電陶瓷的長(zhǎng)度增大,壓電陶瓷驅(qū)動(dòng)上驅(qū)動(dòng)桿與下驅(qū)動(dòng)桿向外擴(kuò)張,帶動(dòng)X軸柔性鉸鏈二軸平臺(tái)沿Y軸運(yùn)動(dòng),由于柔性鉸鏈的柔性較大,可將柔性鉸鏈變形,迫使刀具沿X軸正方向運(yùn)動(dòng),達(dá)到刀具沿X軸進(jìn)給。
2.2 Y軸自由度的機(jī)構(gòu)設(shè)計(jì)
X軸柔性鉸鏈平臺(tái)用通過(guò)螺絲柱將4個(gè)活動(dòng)柔性鉸鏈固定在固定框上,X軸柔性鉸鏈平臺(tái)一端是與壓電陶瓷2固定,當(dāng)壓電陶瓷2在電壓的作用下,直接將力作用在X軸柔性鉸鏈平臺(tái)上,X軸柔性鉸鏈平臺(tái)在受到作用力后,將力傳遞到活動(dòng)柔性鉸鏈上,由于活動(dòng)柔性鉸鏈的圓角型鉸鏈柔性較大,實(shí)現(xiàn)將X軸柔性鉸鏈平臺(tái)整體運(yùn)動(dòng),帶動(dòng)X軸柔性鉸鏈平臺(tái)上的刀具沿Y軸運(yùn)動(dòng),達(dá)到刀具沿Y軸進(jìn)給。
3 具有放大效果的設(shè)計(jì)策略
由于壓電陶瓷具有高頻運(yùn)動(dòng)的效果,但其在電壓作用下,位移量較小,因此需要放大。如圖2所示,將X軸方向的柔性鉸鏈設(shè)計(jì)成對(duì)稱的等腰梯形,利用對(duì)稱式的四桿機(jī)構(gòu)原理,當(dāng)角大于45°時(shí),實(shí)現(xiàn)位移放大的效果。當(dāng)壓電陶瓷1驅(qū)動(dòng)X軸柔性鉸鏈平臺(tái)運(yùn)動(dòng)時(shí),由于分離式柔性鉸鏈?zhǔn)菣M向接觸,產(chǎn)生的剛度較大,刀具只能沿X軸移動(dòng)。又由于X軸柔性鉸鏈平臺(tái)的鉸鏈桿1、鉸鏈桿2是沿Y軸對(duì)稱分布,鉸鏈桿3、鉸鏈桿4是沿Y軸對(duì)稱分布(如圖1所示);鉸鏈桿1、鉸鏈桿3是沿X軸對(duì)稱分布,鉸鏈桿2、鉸鏈桿4是沿X軸對(duì)稱分布。當(dāng)鉸鏈桿1與X軸夾角為72°時(shí),根據(jù)tan72°=3.08,故行程位移放大到3.08倍。鉸鏈桿1、鉸鏈桿2是沿Y軸對(duì)稱分布,故鉸鏈桿2的行程位移放大也同時(shí)放大到3.08倍,使得X軸上半部的行程位移放大至6.16倍。由于鉸鏈桿1、鉸鏈桿3是沿X軸對(duì)稱分布,鉸鏈桿2、鉸鏈桿4是沿X軸對(duì)稱分布X軸上半部的行程位移也放大至6.16倍,致使在壓電陶瓷1在電壓的作用下,X軸柔性鉸鏈平臺(tái)的整體放大倍數(shù)為6.16倍,實(shí)現(xiàn)X軸柔性鉸鏈平臺(tái)的位移放大效果。
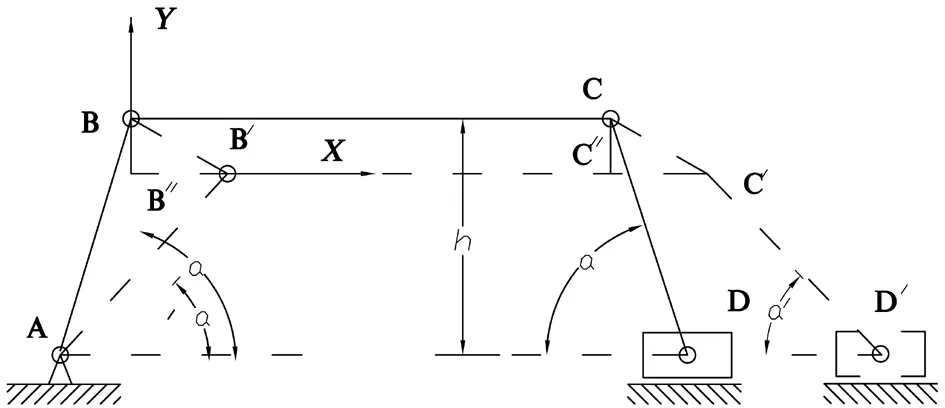
圖2 放大位移工作原理圖Fig.2 Principle Diagramof Magnifying Displacement
4 影響位移量的關(guān)鍵因素
獲得較大的位移量是設(shè)計(jì)快刀伺服器的目標(biāo),而大的位移量主要受動(dòng)態(tài)剛度、阻尼、固有振型影響,特別是動(dòng)態(tài)剛度反映抵抗受力變形的能力。柔性鉸鏈的材料、結(jié)構(gòu)形式、關(guān)鍵尺寸等對(duì)動(dòng)態(tài)剛度的影響度十分明顯。動(dòng)態(tài)剛度直接與固有頻率相關(guān),為了獲得較高的加工質(zhì)量,快刀伺服器應(yīng)該避免共振,需要研究橋式柔性鉸鏈的材料、結(jié)構(gòu)形式、鉸鏈的寬度和厚度等對(duì)模型位移量的影響規(guī)律。
4.1 材料對(duì)模型的影響
常用柔性鉸鏈的材料有304不銹鋼、60Si2Mn、Tc10(α+β型鈦合金)、Ni18Co9Mo5Ti、QBe2等,由每種材料有其特定的物理性能(如表1所示),故在同等溫度和作用力下,相同的結(jié)構(gòu)有不同的變形量。
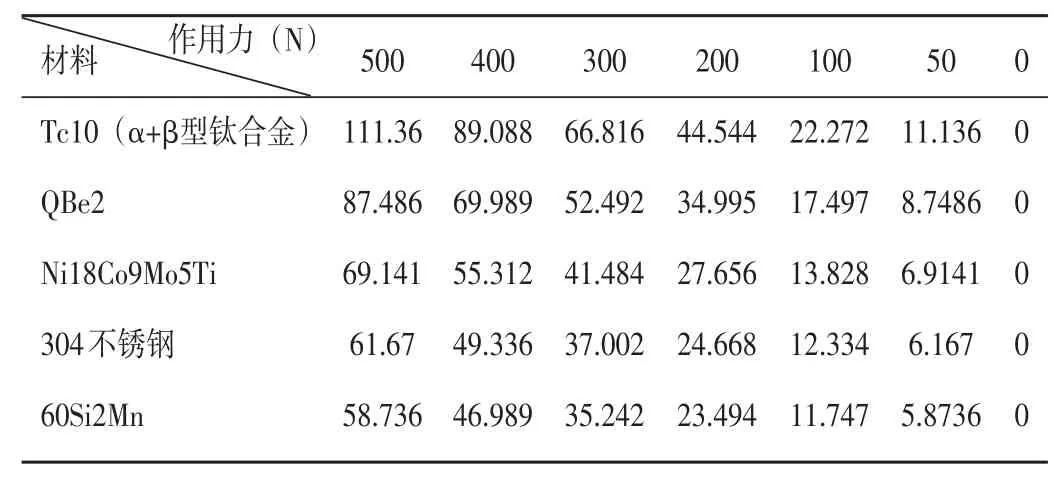
表1 材料對(duì)位移的影響(單位:μm)Table1 Effect of Material on Displacement(Unit:μm)
為了更好地分析變形量的大小,根據(jù)不同材料的彈性模量、泊松比、密度等物理特性,通過(guò)三維建模技術(shù),形成如圖1所示的橋式柔性鉸鏈模型,將其導(dǎo)入到Ansys軟件中,根據(jù)有304不銹鋼、60Si2Mn、Tc10(α+β型鈦合金)、Ni18Co9Mo5Ti、QBe2等不同材料的物理特性,通過(guò)網(wǎng)格化后,分別在模型上加0 N、50 N、100 N、200 N、300 N、400 N、500 N的作用力,會(huì)產(chǎn)生不同的微位移量。仿真分析可得如圖3所示的剛度曲線圖。
通過(guò)仿真發(fā)現(xiàn),Tc10(α+β型鈦合金)、QBe2、Ni18Co9Mo5Ti、304不銹鋼、60Si2Mn的剛度依次變低。也就是說(shuō),彈性模量越小的材料,變形量最大,本次研究采用304不銹鋼作為橋式柔性鉸鏈的材料,根據(jù)其密度獲得橋式柔性鉸鏈的質(zhì)量m=5.835kg。
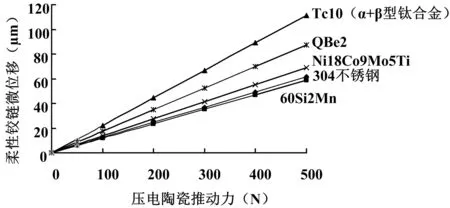
圖3 常見(jiàn)材料變形量Fig.3 Deformation of Common Materials
4.2 結(jié)構(gòu)形式對(duì)模型的影響
研究分析表明,直梁型、倒圓角直梁型、橢圓型、拋物線型、雙曲線型等5種型式[4]為常見(jiàn)的柔性鉸鏈的鉸鏈形式。由于結(jié)構(gòu)形式不同,在相同作用力下的變形量大小和存在的應(yīng)力各有不同。快刀伺服器的柔性鉸鏈需要高頻、大位移,雙曲線型柔性鉸鏈、拋物線型柔性鉸鏈和橢圓型柔性鉸鏈的柔性鉸鏈的鉸鏈應(yīng)力集中小,但在相同作用力下,變形量小。而直梁型柔性鉸鏈和倒圓角直梁型柔性鉸鏈具有較好的柔性,變形量大。綜合上述,采用直梁型柔性鉸鏈和倒圓角直梁型柔性鉸鏈相結(jié)合的方式,設(shè)計(jì)出柔性度較大的橋式柔性鉸鏈。
4.3 寬度對(duì)模型的影響
相同作用力下,對(duì)應(yīng)不同的柔性鉸鏈寬度,能獲得不同的變形量。現(xiàn)保持17 mm厚度不變,將寬度從0.5 mm開(kāi)始,遞增到4 mm。分別在ANSYS環(huán)境下進(jìn)行仿真分析,通過(guò)網(wǎng)格化分析后得到如圖4的結(jié)果圖。
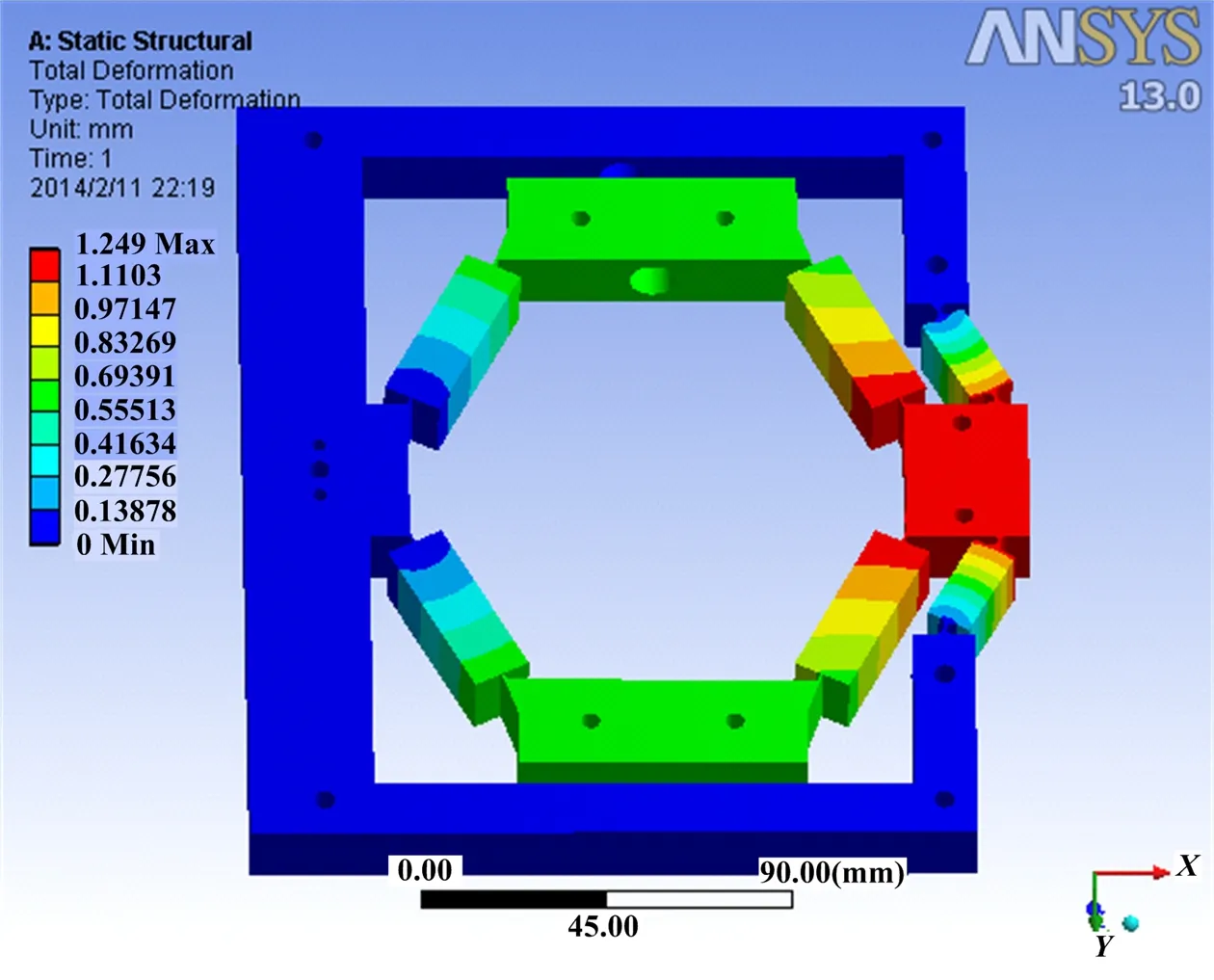
圖4 寬度t=0.5 mm的變形量Fig.4 Deformation of Width t=0.5 mm
通過(guò)分析,得到如表2的變形量,從表中可得,快刀伺服器的位移變化量與寬度緊密相關(guān),橋式柔性鉸鏈寬度每減少0.5 mm,變形量最大可達(dá)0.973 58 mm,特別在寬度為0.5 mm~1 mm處的敏感度較高。為了獲得較好的變形量,本研究選擇的寬度為0.5 mm。
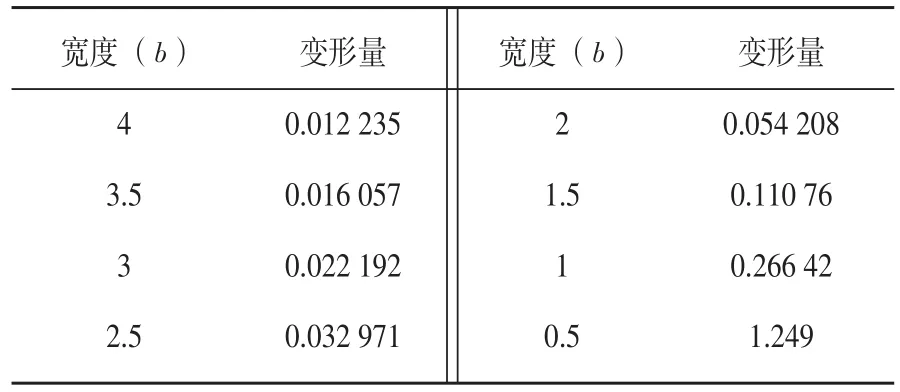
表2 寬度對(duì)位移的影響(單位:mm)Table2 Effect of Width on Displacement(Unit:mm)
4.4 厚度對(duì)模型的影響
為了分析厚度對(duì)橋式柔性鉸鏈的變形影響程度,將鉸鏈的寬度保持1.5 mm不變,將厚度t從12 mm到19 mm每間隔1 mm逐步遞進(jìn)。通過(guò)ANSYS網(wǎng)格化分析后,獲得對(duì)應(yīng)的變形量(如圖5所示),獲得不同厚度對(duì)應(yīng)的變形量(如表3所示),厚度越大,變形量越小,厚度每增加1 mm,變形量最大減少0.012 56 mm之間,與寬度對(duì)位移影響的敏感度對(duì)比,厚度對(duì)橋式柔性鉸鏈的變形敏感度較低,故本研究不研究厚度的位移的影響程度。
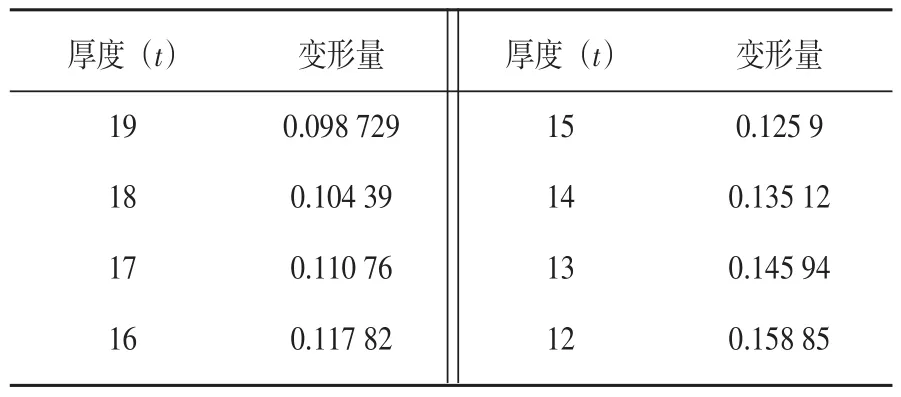
表3 厚度對(duì)位移的影響(單位:mm)Table 3 Effect of Thickness on Displacement(Unit:mm)
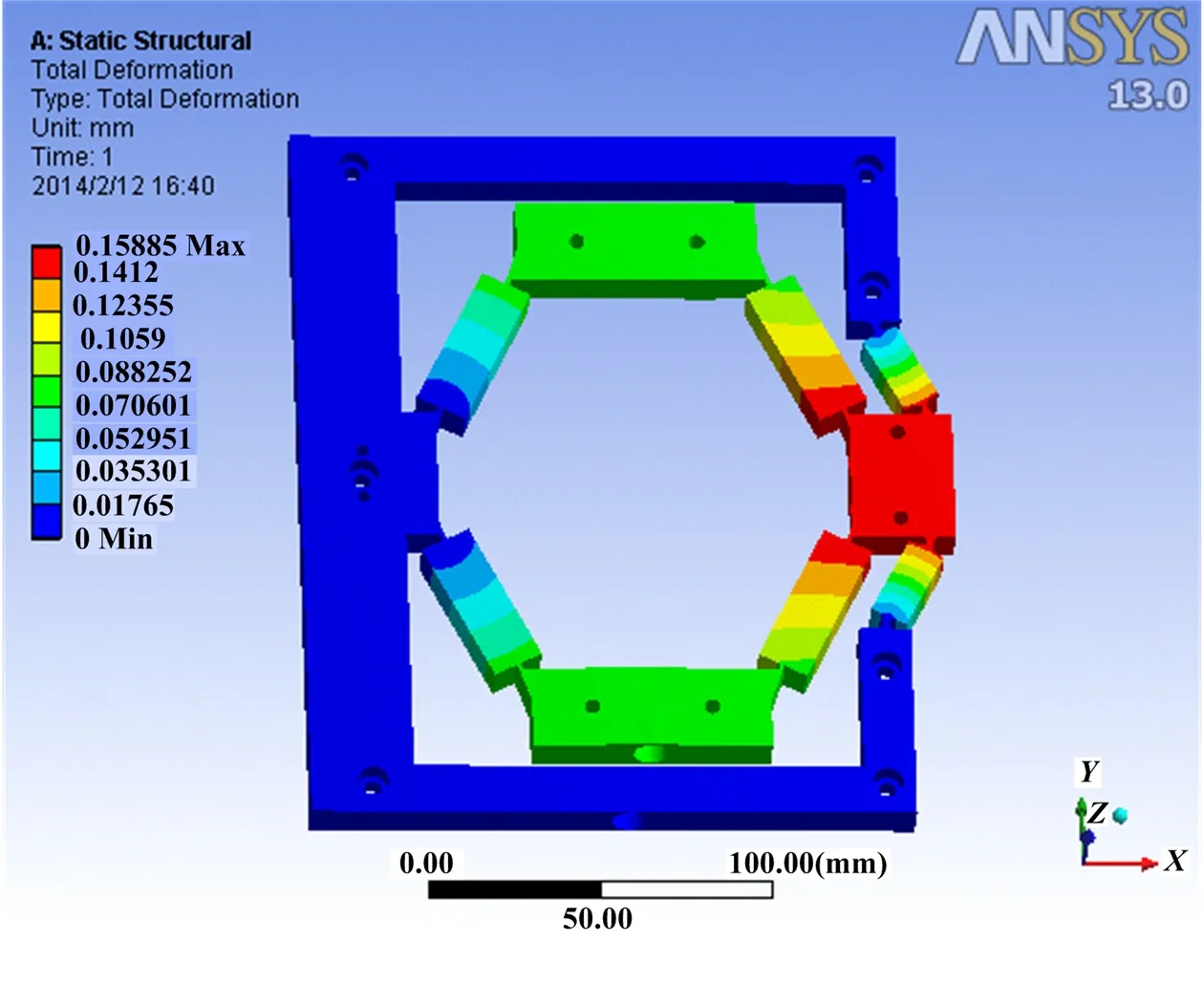
圖5 厚度b=12 mm的變形量Fig.5 Deformation of Thickness b=12mm
5 小結(jié)
論文以二維自由的快刀伺服器需求出發(fā),先對(duì)實(shí)現(xiàn)X軸和Y軸的結(jié)構(gòu)進(jìn)行了系統(tǒng)設(shè)計(jì),然后探索了不同柔性鉸鏈結(jié)構(gòu)形式對(duì)快刀伺服器的剛度影響規(guī)律,通過(guò)分析不同尺寸的柔性鉸鏈對(duì)快刀伺服器剛度的影響規(guī)律,獲取較優(yōu)二軸快刀伺服器拓樸結(jié)構(gòu),從而滿足于超精密加工光學(xué)微陣列結(jié)構(gòu)。
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級(jí)版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36