電動車用雙向能量變換系統用集成電感的有限元仿真分析
2018-08-07 09:46:20李啟國夏鑄亮梁靈威趙小坤
機電工程技術 2018年7期
李啟國,夏鑄亮,梁靈威,趙小坤
(廣汽集團汽車工程研究院,廣東廣州 510640)
0 引言
在能源互聯網背景下,電動汽車不僅是交通工具,也是一種具有移動性和分散性特點的互聯網能量源,電動汽車與電力網連接既可以存儲來源于電網的能量,也可以向電網釋放能量[1]。
電動汽車與電力網之間的能量交換需要具有雙向性流動的特點,本文介紹的電動車用雙向能量變換系統主要包括三部分:逆變驅動部分、充放電部分和雙向直流DCDC;充放電和逆變驅動中部分器件在不同模式下共用,雙向直流DCDC和充放電部分的電感采用集成設計,采用這種設計思想可以提高此雙向變換系統裝置的功率密度、減小體積、減輕重量。
1 雙向能量變換裝置
雙向能量變換裝置主要由雙向DC-DC和雙向DC-AC變換器組成,可工作于電機驅動、充電、放電三種模式下,其拓撲圖如圖1。

圖1 雙向能量變換系統拓撲
1.1 電機驅動模式
電機驅動模式也是此變換系統的主要工作模式,雙向DCDC工作于BOOST升壓模式,S8為PWM驅動狀態,其反并聯二極管不工作,S7為開路狀態,其反并聯二極管提供續流通路;與電感連接的繼電器K1、K2、K3斷開,與電機交流輸入連接的繼電器K4、K5、K6閉合,高壓直流母線經過S1-S6(IGBT模塊)逆變輸出交流給電機供電,從而驅動車輛前進。
1.2 放電模式
放電模式下,雙向DCDC工作于BOOST升壓模式,S8為PWM驅動狀態,其反并聯二極管不工作,S7為開路狀態,其反并聯二極管提供續流通路;與電感連接的繼電器K1、K2、K3閉合,與電機交流輸入連接的繼電器K4、K5、K6斷開,高壓直流母線經過S1-S6(IGBT模塊)逆變輸出交流電壓,此交流電壓的負載可為電網或者用電負載,如果連接為電網負載,則電動汽車對電網放電。如果連接為用電負載,則可提供離線的持續供電,不再受制于配電網不能達到地方。
1.3 充電模式
充電模式下,雙向DCDC工作于BUCK降壓模式,S7為PWM驅動狀態,其反并聯二極管不工作,S8為開路狀態,其反并聯二極管提供續流通路;電感連接的繼電器K1、K2、K3閉合,與電機交流輸入連接的繼電器K4、K5、K6斷開,電網交流電壓經過S1-S6(IGBT模塊)整流成直流電壓通過DCDC變換器給電池充電,實現能量從電網到電動汽車的流動。
2 集成電感設計與仿真
2.1 電感參數定義
本裝置中共用了四個電感,DCDC部分電感L4主要是提供PWM開與關的過程中能量的存儲與交換,其所流經的電流為直流電流上疊加一定紋波,紋波的頻率與S7/S8相同,電感磁芯有直流偏滯,Bmax(最高磁密)時電感不能飽和;交流側電感L1、L2、L3為充放電濾波電感,主要目的一是充電時提供有源整流開關期間的儲能;二是濾波及限制電網側的諧波污染。
電感的設計需要先定義如下關鍵參數[2]:(1)電感量,在不同拓撲中電感量的大小決定紋波電流的大小;(2)峰值電流,峰值電流取決于磁芯材料的磁通密度飽和點,在最大電流時磁芯不能飽和;(3)損耗溫升及體積重量,此部分的指標跟紋波電流、開關頻率、材料特性有很大關系;本集成電感磁芯材料為鐵基非晶材料(80%Fe,20SiB類金屬元素構成),它具有高飽和磁感應強度(1.56 T),磁導率、激磁電流和鐵損等各方面都優于硅鋼片的特點[3],此裝置中電感工作設計參數如表1。
2.2 磁路參數初步計算
如上拓撲中四個電感L1、L2、L3、L4一般設計成4個獨立的電感或者L4設計成獨立的電感,L1、L2、L3設計成三相三柱結構,由于L4通過的電流較大,L4的電感量的大小可以方便地通過調節磁芯16的材料或者截面積來調節L4的電感量,L1、L2、L3的電流產生的磁通在磁路10、11、12、13、14中相互耦合,有部分磁通相互抵消,磁芯的損耗可相應減小。本文中將四個電感集成到一個磁芯結構中,一部分磁路共用[4-6],達到減小磁芯用量,減小體積,提供功率密度的目的,集成電感如圖2所示。

表1 電感設計參數

圖2 集成電感結構示意圖
由安培環路定律,可得:

式中:N為電感線圈匝數;I為電感電流;δ為氣隙長度;Hg、Hm、L0分別為氣隙磁場強度,磁芯磁場強度及磁芯長度。
實際由于空氣的磁導率遠低于磁芯的磁導率,大部分的磁勢將降落在氣隙中,式(1)可近似為:

電感公式為:

由式(2)和(3)可以得到:

以上為線圈匝數與磁芯截面積的關系,匝數為初步估算,匝數的選取還與磁芯的窗口填充率及電流密度選取有關,可以初步選擇匝數與磁芯的規格組合進行仿真優化,選電流密度為5 A/mm2,仿真模型參數如表2。
2.3 有限元仿真及結果
Maxwell是主要建立在Maxwell方程基礎上的有限元分析軟件,包括交流/直流磁場、靜電場以及瞬態電磁場、溫度場分析、參數化分析,以及優化功能,損耗、阻抗(R/L)、電感等參數可以自動計算,同時也可以給出相位的磁力線、B和H分布圖、能量密度等圖形結果[7]。有限元仿真中剖分及邊界條件對仿真結果有較大影響,本仿真中采用自然邊界即可,優化后的剖分網格如圖3。
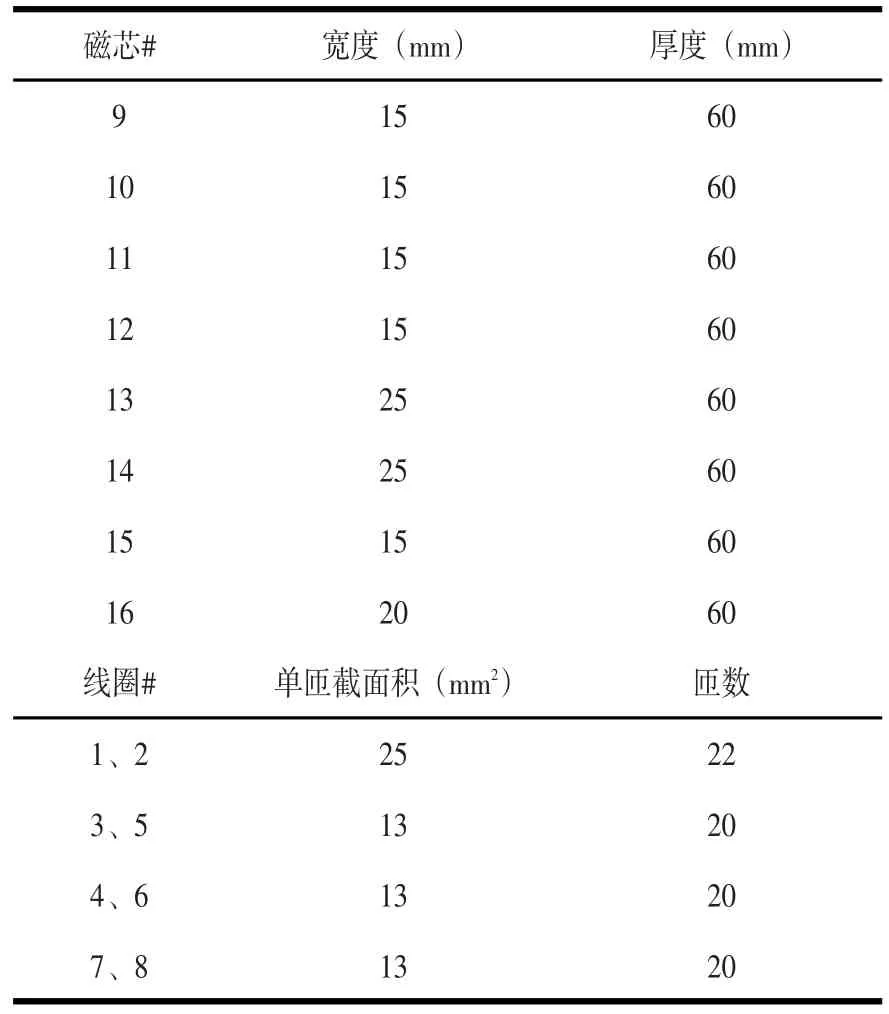
表2 電感仿真模型參數
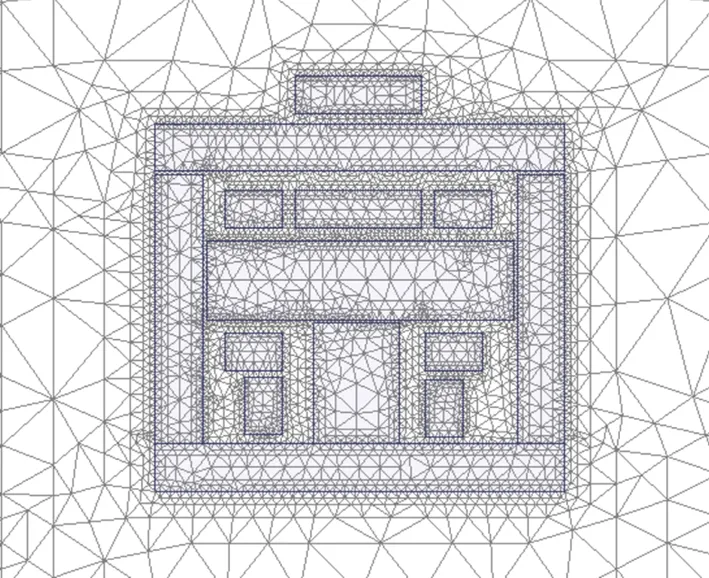
圖3 有限元仿真網格
在Magneto Static求解器中仿真計算電感矩陣參數的結果如表3。

表3 電感矩陣仿真結果
在Transient求解器中主要模擬一個輸出周期中的實際工況,以驗證磁芯結構是否合理,磁芯是否飽和,在L1最大電流(π/4時)仿真計算L1磁芯(磁路13)的磁感應強度云圖、磁勢線分布如下。
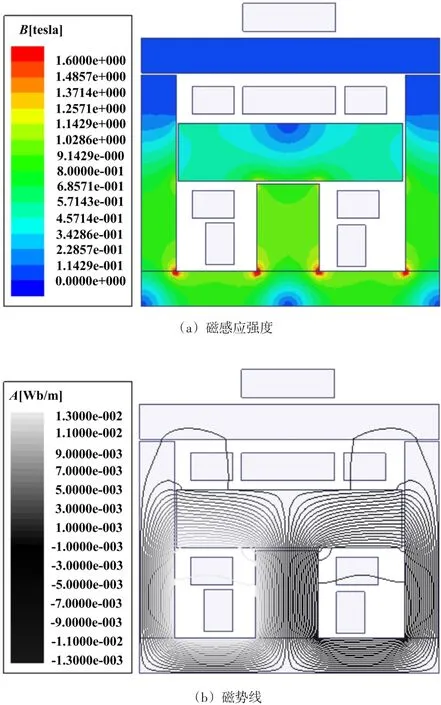
圖4 磁感應強度、磁勢線分布
從以上仿真結果來看,此種集4個電感集成于一體的磁芯結構具有可行性,并且結果滿足預期的要求,從電感矩陣可以看出,L1、L2、L3的電感量誤差為8μH(約1.2%),三個電感之間的耦合程度較高約為48.5%,L4與其他電感耦合程度較小,其磁路主要為最外層磁芯。磁路中在邊角的局部小范圍內磁密接近飽和點,但對關鍵性能不影響,其他大部分地方還未到飽和點。
3 結語
本文介紹了一種電動車用雙向能量變換系統及儲能電感與交流濾波電感的集成設計的磁芯結構,通過有限元對其磁路及關鍵指標參數進行仿真,仿真結果表明,這種集成結構的電感方案可以滿足要求,并且此種結構的集成電感較傳統的設計成4個獨立的電感方式具有體積小、重量輕、功率密度高的特點。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
海峽姐妹(2020年8期)2020-08-25 09:30:18
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24