血液檢測組件上料機械手設計
2018-08-08 07:37:08杜慧林高志彬劉志紅
廈門理工學院學報
2018年3期
關鍵詞:設計
杜慧林,高志彬,劉志紅
(青島理工大學機械與汽車學院,山東 青島 266520)
1 氣壓傳動上料機械手整體設計
根據工作要求設計的上料機械手具有3個自由度,利用氣動系統完成回轉運動、伸縮運動、升降運動和工件的夾緊操作。通過對上料機械手的控制操作將血液檢測組件的塑料支架、橡膠圈、玻璃片、塑料片放置在檢測儀的適當位置,完成血液檢測組件的自動化裝配[3]。
當機械手工作時,機械手手爪夾緊氣缸抓取工件,通過升降氣缸作用提到所需高度,在伸縮氣缸作用下水平移動到所需位置,立柱內部的回轉機構旋轉所需角度,然后夾緊氣缸放松,物體被放置,最后氣動機械手復位[4]。
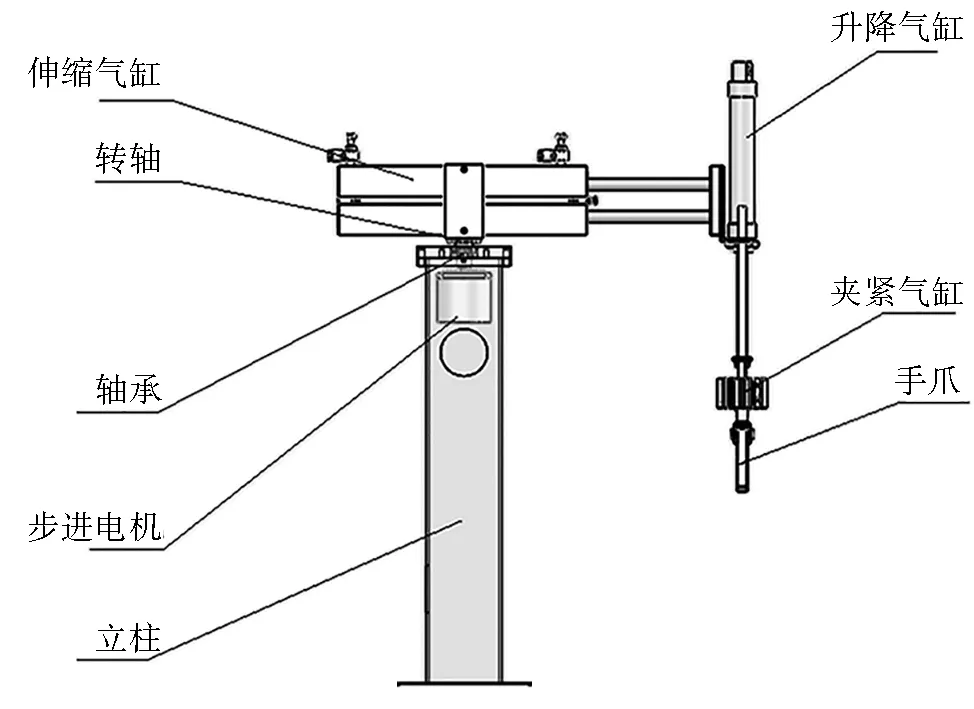
圖1 上料機械手總體結構圖Fig.1 General structure of feeding manipulator
設計過程中,整機的回轉、伸縮與提升操作分別由電機、伸縮氣缸和升降氣缸實現。整機的回轉機構由步進電機轉軸與整機轉軸通過銷釘固定連接,當步進電機轉動時帶動轉軸轉動,從而使整個機械手轉動合適的角度,以完成工件的正確放置。為保證回轉精度,采用推力球軸承用于工件連接[5]。伸縮氣缸通過螺釘與大彎板連接,大彎板則通過螺釘與轉軸固定連接,從而實現轉軸帶動整個機械手轉動和平移運動。上料機械手總體結構如圖1所示。
機械手通過升降氣缸和夾緊氣缸與手爪連接完成工件的提升和夾緊工作,其中升降氣缸通過連接桿、轉臺和活塞等連接件來實現與手爪的連接[6]。為防止機械手手臂繞軸線轉動,保證手爪的正確方向,并使活塞桿不承受較大的彎曲力矩作用,在設計手臂結構時采用導向裝置,導向裝置通過導向桿實現。……
登錄APP查看全文
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04