多目標多約束組合體與飛船軌道維持優化
2018-08-10 02:53:56陳莉丹謝劍鋒李俊峰郝大功
宇航學報 2018年7期
陳莉丹, 謝劍鋒, 李俊峰, 郝大功
(1. 清華大學航天航空學院,北京 100084;2. 北京航天飛行控制中心,北京 100094)
0 引 言
我國的交會對接任務飛行過程按時間順序包括飛船起飛入軌段、遠距離導引段、近距離導引段、平移靠攏段、對接段、組合體運行段、撤離段、返回準備段和返回段。其中,組合體運行段是指飛船與天宮對接鎖緊后,飛船的制導、導航與控制(GNC)分系統停止工作,完全由天宮控制,直到飛船與天宮解鎖分離。撤離段是指飛船與天宮解鎖開始到飛船撤離至安全距離為止。返回準備段是指飛船撤離之后直至返回制動開始。組合體運行段、撤離段、返回準備段是交會對接任務的重要階段,期間要進行各種空間技術實驗,還要為飛船安全返回地面提供必要的軌道條件。所以,為了確保科學實驗順利進行和飛船安全返回,需要研究組合體運行段、撤離段、返回準備段的軌道維持聯合規劃方法。
航天器軌道維持目標與具體航天任務要求緊密相關,不同任務會對軌道維持提出不同的要求,一般包括地面軌跡維持、軌道高度維持、軌道構型維持等。文獻[1-5]主要針對衛星地面軌跡保持問題進行了探討,文獻[6-7]針對太陽同步軌道衛星和超低軌道衛星研究了軌道高度和偏心率的協調控制,文獻[8-11]研究了近地衛星星座的構型保持問題,文獻[12-13]設計了衛星在平動點的軌道維持方法。
交會對接任務對不同階段的多個軌道特征參數提出了要求,文獻[14]針對神舟八號、九號任務,解決了地面軌跡、指定點高度及偏心率三個特征參數的控制問題,在神舟八號至神舟十號任務中得到了成功應用。神舟十一號任務與以往交會對接任務相比,軌道維持控制存在以下不同點:一是控制目標在滿足返回升交點、制動點高度和撤離點軌道偏心率要求的基礎上,新增了對制動點速度傾角的要求;二是組合體在軌飛行時間長達30天,使軌道偏心率控制難度增大;三是天宮二號伴星的存在,使得在撤離返回段,飛船、天宮、伴星的相對運動關系復雜,需要規避碰撞風險。這些都增加了組合體與飛船軌道維持規劃的難度,文獻[14]設計的策略已不能適應。本文結合神舟十一號任務需求,建立了多目標特征參數的控制方程;提出了通過兩次組合體與飛船聯合規劃來滿足不同約束的控制策略;研究了結合規避控制的飛船雙脈沖維持優化控制方案;最后設計算例驗證了該方法正確有效。
1 問題描述
我國的交會對接任務標稱軌道設計為近圓回歸軌道,神舟八號至十號為高度約343 km的2天回歸軌道,神舟十一號為高度約393 km的3天回歸軌道。標稱軌道可以使地面軌跡定期重復,同時每個回歸周期軌跡嚴格通過主著陸場,這樣的設計便于安排正常及應急落區,最大程度上保障航天員正常或中途應急返回的要求。但由于初始軌道偏差以及各種攝動影響,使得實際飛行軌跡偏離標稱值,需要軌道維持控制來消除軌跡偏差。
飛船返回采用標稱彈道制導,如果制動點參數與標稱狀態相差較大,將嚴重影響返回品質,威脅航天員安全,所以對制動點軌道參數有嚴格的要求。神舟十一號任務標稱軌道高度抬高了約50 km,為了與返回航程相適應,除制動點高度外還新增了對制動點速度傾角的要求。
另外,交會對接任務中飛船與天宮接近或分離時,自主控制使用近圓軌道相對運動方程,這要求飛船對接和撤離時軌道偏心率盡量小。其中,對接點軌道偏心率由天宮初始軌道控制,撤離點偏心率則由組合體段的軌道維持來實現。神舟十一號任務組合體運行長達30天,攝動引起軌道平根數偏心率的周期變化表現明顯,偏心率控制難度增大。
最后,神舟十一號任務增加了天宮二號伴星飛行控制,伴星釋放后完成對組合體的飛越、駐留等實驗,在組合體后方一定距離處等待,待飛船返回后伴星重新追趕捕獲天宮。在飛船撤離后,會形成飛船、天宮和伴星三目標的近距離飛行,期間還有飛船撤離脈沖、飛船雙脈沖軌道維持等控制,相對運動狀態比以往任務更加復雜,存在碰撞風險,可能威脅到航天員的安全。所以,撤離返回段的軌道維持要保證各個目標之間的安全距離。
綜上所述,神舟十一號任務組合體運行和飛船返回準備段的軌道維持是一個多目標多約束的優化控制問題。控制優化的目標有:
1)組合體運行要求軌道為近圓軌道,撤離時刻軌道平根數偏心率小于0.001。
2)飛船返回圈地面軌跡與標稱一致,返回圈升交點目標為37.7°。
3)飛船返回制動點位于南半球納米比亞測控弧段內,要求軌道高度393 km,速度傾角-0.05°。
控制優化的約束主要有測控約束和安全性約束:
1)在控制優化時考慮測控約束,即要求組合體及飛船維持控制在地面或中繼測控弧段內。
2)撤離和返回準備階段,三目標相對距離要求滿足安全門限20 km,且至飛船返回時刻,伴星距飛船和天宮的距離不小于100 km。
2 多目標軌道維持控制算法及分析
2.1 返回升交點的控制
(1)
當實際軌道與標稱軌道存在偏差時,實際升交點經度也會偏離標稱升交點,偏差dλ可表示為:
(2)

(3)
式中:Δλ為當前升交點經度偏差,Δλ0為初始升交點經度偏差。式(3)即為升交點經度偏差控制方程。飛船返回軌跡要求與標稱軌跡重合,即要求Δλ=0,根據式(3)可解得,消除返回圈升交點經度偏差的軌道半長軸改變量Δac為:
(4)
式中:tr為返回時刻,tc為控制時刻。由Δac可得到消除升交點經度偏差的控制量Δvc。
從式(4)可以看出,軌跡控制量與時間歷程相關,時間歷程越長,Δvc越小,因此,從能量的角度來看,軌跡控制應盡早進行。很多文獻[1-5]均分析了軌跡控制的特性,這里不再重復。
2.2 撤離點偏心率的控制及分析
撤離點偏心率的控制是和升交點控制相耦合的,為了在控制軌跡的同時兼顧控制軌道偏心率,將軌跡控制的Δvc分成兩個脈沖執行。
(5)
如果控制點距飛船撤離點較近,則可以通過式(5)簡單分配軌跡控制量Δvc來實現軌道偏心率控制。其中,Δv1為軌跡控制第一脈沖控制量,Δv2為軌跡控制第二脈沖控制量,k為分配系數。
如果控制點距離飛船撤離點很遠,則必須要考慮攝動對軌道平均偏心率的影響。文獻[15]給出了考慮地球J2和J3項時凍結軌道的必要條件,文獻[7]給出了考慮地球J2和J3項時軌道平均偏心率的變化規律,說明軌道偏心率演化與初始軌道近地點幅角相關。圖1給出了393 km高度近圓軌道,不同初始近地點幅角情況下,偏心率的中長期演化情況。地球引力場模型采用JGM-3模型32×32階。
從圖1可以看出,考慮地球更高階非球形的情況下,目標近地點幅角選擇90°附近時,軌道偏心率的演化較為平穩。所以在控制間隔時間較長的偏心率時,要對當前軌道偏心率和近地點幅角聯合控制。
對于近圓軌道,引入偏心率矢量e=(ex,ey):
(6)
式中:e為軌道偏心率大小,ω為近地點幅角。切向速度增量ΔvT對a和e的攝動方程可簡化為:
(7)

第一次脈沖控制位置u1=arctan(Δey/Δex),控制量大小Δv1為:
(8)
第二次脈沖控制位置u2=u1+π(若第二次脈沖控制需與第一次脈沖控制間隔m圈,則u2=u1+(2m+1)π),控制量大小Δv2為:
(9)
2.3 返回制動點高度與速度傾角的控制及分析
任務返回軌道參數制動點高度hbk和速度傾角sbk也需要雙脈沖控制來實現。由式(8)和式(9)可知,求解雙脈沖控制量需要確定目標軌道的半長軸a,偏心率e和近地點幅角ω,需要建立兩組參數的函數關系。顯然,由hbk和sbk無法唯一確定a,e,ω,所以引入優化變量,目標軌道返回制動時刻軌道真近點角f。
由橢圓軌道性質可得:
(10)
式中:μ為地球引力常數,p為軌道半通徑,e為軌道偏心率,f為真近點角,s為真近點角為f時的速度傾角。由式(10)可知,在速度傾角s確定時,軌道偏心率e是真近點角f的單值函數。另有以下關系:
(11)
式中:r為制動點地心距,r0bk為制動點對應的地球半徑,可以由軌道傾角和制動點星下點位置參數求得。聯合式(10)和式(11),可由f,hbk,sbk唯一確定a,e,ω,再由式(8)和式(9)求解飛船雙脈沖控制量。由橢圓軌道性質可知,如果sbk>0,f的尋優范圍為(0°,180°),如果sbk<0,f的尋優范圍為(180°,360°),令f在可優化范圍內尋優則可得到不同約束的最優控制方案。
下面分析交會對接標稱393 km高度近圓軌道在不同初始近地點幅角條件下,滿足飛船返回制動點約束的飛船雙脈沖維持特性。
圖2~3中,f為目標軌道真近點角,u1表示第一脈沖控制點,ω0表示初始軌道近地點幅角,Δv表示飛船雙脈沖控制的矢量和的大小。
從圖2可以看出,由于目標速度傾角sbk為負,所以f在(0°,180°)范圍內無解,隨著f的變化,u1被分成兩段,跳變點隨ω0的不同而有所變化。如果以u1為自變量,從圖3可以看出,在不同初始ω0的條件下,Δv隨著u1的變化規律基本類似。隨著u1的增大,Δv被分成了兩段,在每段內均為單調遞減,漸近線為u1=ubk-180°,記為u1j, Δv(u1=u1j-)=-∞, Δv(u1=u1j+)=+∞。
由以上特性分析可知,在不同初始軌道條件下,飛船返回雙脈沖控制在滿足返回制動點約束的同時,可以通過優化雙脈沖控制的時機來控制Δv的大小,甚至是正負,以此來改變飛船撤離并執行返回維持后飛船、天宮以及伴星的三目標相對運動狀態,從而規避三目標碰撞風險。
3 組合體與飛船聯合軌道維持策略
由軌跡控制規律可知,消除升交點偏差的控制要盡早進行,所以第一次組合體維持安排在組合體形成后1天,考慮到控制執行誤差以及組合體近30天的軌道預報誤差,在飛船撤離前1~2天進行第2次維持來消除以上偏差,軌跡控制分為2個脈沖兼顧偏心率控制。飛船撤離執行固定撤離脈沖Δvspt,撤離后進行單體雙脈沖控制,目標為飛船制動點軌道高度及速度傾角。由于組合體階段軌跡控制與飛船返回制動點參數控制相互耦合影響,需要協同一體優化來實現4個目標參數滿足要求。根據神舟十一號任務特點,采用第一次組合體與飛船聯合規劃時重點保證撤離點偏心率,第二次聯合規劃時重點保證撤離及返回階段的相對飛行安全的策略。每次聯合規劃由組合體2個控制脈沖與飛船2個控制脈沖組成。因此,組合體軌道維持與撤離后飛船返回前軌道維持聯合規劃,設計變量包括:
ut1,Δvt1,ut2,Δvt2,us1,Δvs1,us2,Δvs2
目標量包括:
λret,espt,hbk,sbk
約束包括:
Rmin≥20 km,Rret≥100 km
其中,ut1,Δvt1,ut2,Δvt2是組合體雙脈沖軌道維持的執行時刻和速度增量,us1,Δvs1,us2,Δvs2是飛船雙脈沖軌道維持的執行時刻和速度增量,λret,espt,hbk,sbk分別是返回圈升交點經度、撤離時刻軌道偏心率、制動點高度和制動點速度傾角。
第一次組合體與飛船聯合軌道維持策略迭代計算流程如下:
1) 初始條件設置。包括組合體初始軌道、組合體質量和大氣阻尼面積、飛船單體質量和大氣阻尼面積、攝動模型。
2) 利用初始軌道根據軌道模型外推積分,確定在初始軌道條件下控后偏心率演化平穩的目標軌道e,ω。
3) 初始軌道外推至返回圈升交點,計算初始偏差Δλ0。
4) 并通過軌跡控制方程式(4)確定Δa,從而得到目標軌道a。
5) 根據式(8)和式(9)求解組合體雙脈沖控制位置和控制速度增量ut1,Δvt1,ut2,Δvt2。
6) 控后軌道外推至飛船撤離計算espt,施加撤離脈沖,轉換飛船單體模型外推至返回制動點,計算高度hbk和速度傾角sbk。
7) 根據式(10)、式(11)確定目標軌道,根據式(8)、式(9)迭代計算飛船雙脈沖控制位置和控制速度增量us1,Δvs1,us2,Δvs2。
8) 由于飛船控制影響了地面軌跡,飛船雙脈沖控后軌道外推至返回圈升交點,重新計算升交點偏差Δλ。
9) 判斷λret,espt,hbk,sbk是否均滿足精度要求,如果不滿足轉至步驟4);若滿足,迭代計算結束。
第二次組合體與飛船聯合軌道維持策略迭代計算流程基本相同,刪掉步驟4),步驟5)改為根據式(5)求解組合體雙脈沖控制位置和控制速度增量ut1,Δvt1,ut2,Δvt2。在步驟7)后增加判斷撤離至返回段3目標相對飛行軌跡步驟,如出現碰撞風險,返回7)優化雙脈沖控制位置及速度增量直至能夠規避碰撞風險。
4 組合體與飛船聯合軌道維持控制算例
仿真計算中,組合體質量16200 kg,大氣阻尼面積34.8 m2,飛船撤離后單體質量7800 kg,飛船單體大氣阻尼面積24.7 m2。地球引力場模型采用JGM-3模型32×32階,大氣密度采用MSISE-90模型,阻尼系數Cd取2.2,地磁指數Ap取12,太陽輻射流量日均值F107和81天均值F107P均取120。
組合體第一次軌道維持安排在對接后1天,即飛船入軌后46圈和52圈執行組合體雙脈沖控制,第二次軌道維持安排在飛船撤離前2天,即461圈和469圈。飛船在第489圈納米比亞測控弧段內撤離,撤離脈沖為+0.5 m/s,飛船撤離后單體雙脈沖軌道維持安排在第496圈,維持后飛船在505圈納米比亞測控弧段內制動,506圈返回主著陸場。
4.1 第一次組合體與飛船聯合軌道維持算例
第一次組合體與飛船聯合軌道維持以優化撤離點軌道偏心率為主要目標。軌道維持前軌道瞬根數如表1所示,歷元2016-10-29T02:23:00.00。

表1 第一次聯合維持組合體初始軌道瞬根數Table 1 Complex’s orbit elements before the 1st united maintenance
表2給出了標稱軌道以及軌道半長軸正負偏差5 km時,第一次飛船與組合體聯合軌道維持規劃結果。結果表明,通過第一次組合體與飛船聯合軌道維持,撤離及返回的各個目標均能嚴格保證。
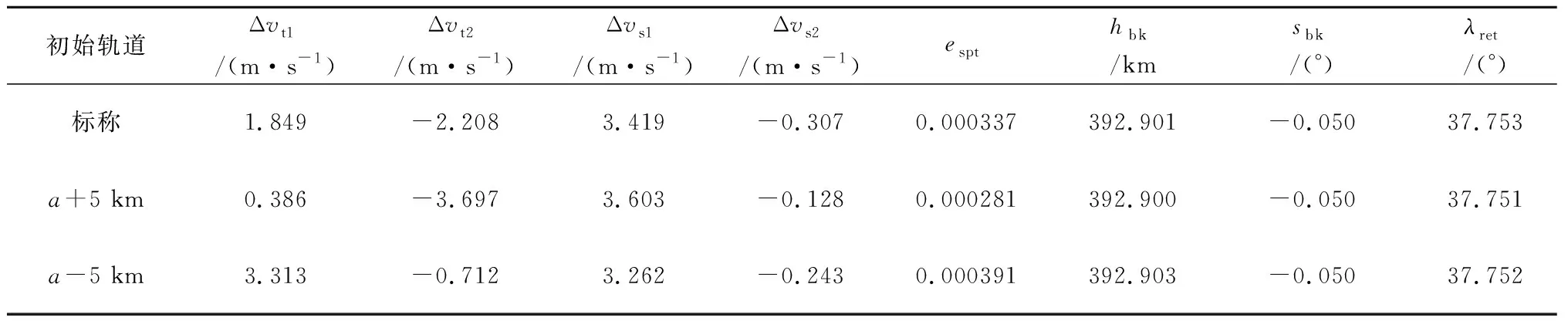
表2 第一次組合體和飛船聯合軌道維持控制規劃結果Table 2 Result of the 1st united maintenance
圖4給出了標稱初始軌道情況下,第一次組合體與飛船聯合軌道維持后軌道平根數偏心率的演化情況。可以看出,利用組合體偏心率矢量雙脈沖控制策略可以有效地控制控后軌道平根數偏心率的演化,使偏心率在撤離點時到達谷底。該策略還可以使控后軌道在組合體飛行30天內偏心率變化相對平穩,有利于科學實驗的開展。
4.2 第二次組合體與飛船聯合軌道維持算例
第二次組合體與飛船聯合軌道維持以滿足撤離和返回階段3目標相對飛行安全約束為優化目標。
伴星在飛船撤離前6天結束科學實驗,駐留在組合體后方一定距離處開始準備規避控制。Tspt- 6天組合體及伴星軌道分別如表3、表4所示,歷元2016-11- 09T08:00:00.00。

表3 第二次聯合維持組合體初始軌道瞬根數Table 3 Complex’s orbit elements before the 2nd united maintenance

表4 第二次聯合維持伴星初始軌道瞬根數Table 4 Concomitant satellite’s orbit elements before the 2nd united maintenance
表5給出了第二次飛船與組合體聯合軌道維持標稱策略和優化策略的規劃結果。

表5 第二次組合體和飛船聯合軌道維持控制規劃結果Table 5 Result of the 2nd united maintenance
在兩種策略下,飛船撤離階段相對天宮位置變化如圖5~6所示。飛船撤離脈沖為+0.5 m/s,所以飛船撤離后相對天宮向后撤退,至飛船返回雙脈沖維持執行時約在天宮后方50 km處,如果按標稱策略實施飛船雙脈沖控制,如圖5所示,雙脈沖速度增量和為負,飛船很快就會重新追趕上天宮,最小距離約20 m,存在很高的碰撞風險;如果結合規避控制對飛船雙脈沖維持進行優化,如圖6所示,同樣滿足飛船返回各項要求,但雙脈沖速度增量和為正,飛船相對天宮繼續向后撤退,與天宮相對距離逐漸增大,將不再存在與天宮的碰撞風險。根據優化結果,伴星與天宮也不存在碰撞風險,伴星僅需規避與飛船碰撞風險即可,在本算例中,伴星需要進行2次規避控制,均為降軌,每次速度增量為-0.37 m/s,至飛船返回時刻,伴星距飛船的距離約150 km。
5 結 論
本文研究了神舟十一號任務組合體與飛船軌道維持聯合規劃方法,建立了升交點經度、軌道偏心率、指定時刻軌道高度及速度傾角多目標特征參數的耦合控制方程;根據任務組合體及飛船的飛行特點及控制難點,提出了通過兩次聯合規劃來滿足不同約束的規劃策略。在第一次組合體與飛船聯合軌道維持策略規劃時,通過對偏心率矢量的控制保證撤離點偏心率滿足要求。在第二次組合體與飛船聯合軌道維持策略規劃時,提出了通過優化飛船雙脈沖控制位置來控制雙脈沖速度增量和的大小,甚至是正負,以此來改變飛船撤離并執行返回維持控制后飛船、天宮以及伴星的三目標相對運動狀態,從而解決了規避三目標碰撞風險的關鍵一環,并通過算例驗證了該方法的有效性。
本文繼承并發展了文獻[14]組合體與飛船聯合軌道控制方法,在軌道長期偏心率控制和飛船返回雙脈沖控制優化方面研究了新的方案,提出的組合體與飛船軌道維持策略聯合規劃方法在神舟十一號任務中得到了成功應用,保障了任務的高精度控制和返回階段三目標的相對飛行安全,該方法也可用于后續空間站任務的軌道維持策略設計。