柔性關(guān)節(jié)機(jī)器人動(dòng)力學(xué)分析
2018-08-15 02:18:02王鴻熠韓先國
現(xiàn)代制造技術(shù)與裝備 2018年7期
王鴻熠 韓先國
(北京航空航天大學(xué) 機(jī)械工程及自動(dòng)化學(xué)院,北京 100191)
自誕生至今,工業(yè)機(jī)器人在工業(yè)領(lǐng)域得到了越來越多的應(yīng)用[1]。近年來,除了在傳統(tǒng)的焊接、噴涂等領(lǐng)域的應(yīng)用外,工業(yè)機(jī)器人以其機(jī)動(dòng)、靈巧等特點(diǎn),開始越來越多地應(yīng)用于航空航天領(lǐng)域[2-3]。但串聯(lián)機(jī)器人剛度較差,使得其應(yīng)用受到了一定的限制。
機(jī)器人動(dòng)力學(xué)是對(duì)機(jī)器人剛度分析及振動(dòng)分析的重要基礎(chǔ)。本文以ABB IRB4600機(jī)器人為對(duì)象,建立了考慮關(guān)節(jié)柔性的動(dòng)力學(xué)模型,并給定了機(jī)器人運(yùn)動(dòng)軌跡,分析了機(jī)器人運(yùn)動(dòng)過程中的關(guān)節(jié)變形情況。
1 關(guān)節(jié)柔性模型簡(jiǎn)化
1.1 機(jī)器人柔性來源分析
串聯(lián)型工業(yè)機(jī)器人的柔性主要體現(xiàn)在兩個(gè)方面,即連桿柔性和關(guān)節(jié)柔性[4]。連桿柔性表現(xiàn)為機(jī)器人各桿在力的作用下發(fā)生變形。關(guān)節(jié)柔性表現(xiàn)為各個(gè)關(guān)節(jié)在力的作用下發(fā)生形變。通常,機(jī)械臂各連桿剛度大于關(guān)節(jié)剛度,機(jī)器人連桿變形可以忽略,現(xiàn)僅考慮機(jī)器人關(guān)節(jié)柔性造成的影響[5]。
關(guān)節(jié)柔性造成的影響主要有兩點(diǎn)。一是在機(jī)器人運(yùn)動(dòng)過程中,機(jī)器人各關(guān)節(jié)受到驅(qū)動(dòng)力作用,產(chǎn)生關(guān)節(jié)變形,該形變影響了機(jī)器人的絕對(duì)定位精度。二是機(jī)器人的振動(dòng),其主要體現(xiàn)在兩個(gè)方面:當(dāng)機(jī)器人運(yùn)動(dòng)結(jié)束后,各關(guān)節(jié)的變形依然存在,隨著運(yùn)動(dòng)過程中積累的能量釋放,系統(tǒng)出現(xiàn)殘余振動(dòng);機(jī)器人在某一位姿下,受到變化的外部力作用,各關(guān)節(jié)變形也隨之改變,導(dǎo)致系統(tǒng)振動(dòng)。本文重點(diǎn)分析機(jī)器人運(yùn)動(dòng)過程中及運(yùn)動(dòng)結(jié)束后機(jī)器人關(guān)節(jié)角度及末端振動(dòng)情況。
1.2 關(guān)節(jié)柔性模型簡(jiǎn)化
spong在1987年首先提出了柔性關(guān)節(jié)簡(jiǎn)化模型。該簡(jiǎn)化模型對(duì)于實(shí)際關(guān)節(jié)有如下假設(shè):機(jī)器人關(guān)節(jié)在關(guān)節(jié)力作用下只存在微小變形,該變形處于線彈性范圍內(nèi),機(jī)器人各關(guān)節(jié)可視作線性扭簧;電機(jī)轉(zhuǎn)子軸線與關(guān)節(jié)軸線同軸,可將電機(jī)轉(zhuǎn)子視為質(zhì)量均勻的軸對(duì)稱剛體;將電機(jī)視為理想力矩源,與機(jī)械動(dòng)力學(xué)相比,電機(jī)電氣動(dòng)力學(xué)足夠快,可以忽略其動(dòng)力學(xué)影響。
根據(jù)以上假設(shè),可以將機(jī)器人關(guān)節(jié)簡(jiǎn)化為一線性扭簧(扭簧剛度為k)。
2 機(jī)器人運(yùn)動(dòng)學(xué)分析
2.1 機(jī)器人坐標(biāo)系建立
機(jī)器人坐標(biāo)系建立是機(jī)器人運(yùn)動(dòng)學(xué)分析及動(dòng)力學(xué)分析的前提。采用前置D-H參數(shù)法,建立IRB4600關(guān)節(jié)型機(jī)器人連桿坐標(biāo)系,如圖1所示。

圖1 機(jī)器人連桿坐標(biāo)系示意圖
2.2 機(jī)器人正向運(yùn)動(dòng)學(xué)
機(jī)器人相鄰兩桿間的位姿變化矩陣可以表示為i可以得到機(jī)器人末端相對(duì)于機(jī)器人基坐標(biāo)系的齊次變換矩陣為:

3 關(guān)節(jié)柔性機(jī)器人模型
3.1 柔性關(guān)節(jié)機(jī)器人動(dòng)力學(xué)
拉格朗日法推導(dǎo)機(jī)器人系統(tǒng)動(dòng)力學(xué)方程的步驟可以概括為:(1)選取機(jī)器人關(guān)節(jié)坐標(biāo)系、電機(jī)轉(zhuǎn)子轉(zhuǎn)角坐標(biāo)系為廣義坐標(biāo);(2)求解系統(tǒng)動(dòng)能表達(dá)式,包括連桿動(dòng)能與電機(jī)鉆子動(dòng)能;(3)求解連桿與電機(jī)轉(zhuǎn)子勢(shì)能;(4)構(gòu)造拉格朗日函數(shù)并推導(dǎo)動(dòng)力學(xué)方程。
關(guān)節(jié)柔性的機(jī)器人連桿系統(tǒng)動(dòng)力學(xué)方程可以表示為:

式中:τext為外力作用下關(guān)節(jié)力矩;M(q)為質(zhì)量矩陣;H(q,q˙)為非線性科氏力和離心力矢量;G(q)為重力項(xiàng);K=diag(k1,k2,k3,k4,k5,k6)為關(guān)節(jié)剛度矩陣;D=diag(d1,d2,d3,d4,d5,d6)為關(guān)節(jié)阻尼矩陣。
3.2 關(guān)節(jié)柔性機(jī)器人運(yùn)動(dòng)仿真
3.2.1 關(guān)節(jié)空間的軌跡規(guī)劃
在關(guān)節(jié)空間內(nèi)采用三次多項(xiàng)式進(jìn)行軌跡規(guī)劃。對(duì)于關(guān)節(jié)i,驅(qū)動(dòng)機(jī)構(gòu)輸出轉(zhuǎn)角θi可表示為時(shí)間的函數(shù),設(shè)其三次多項(xiàng)式參數(shù)為ai0、ai1、ai2、ai3,即:

給定機(jī)器人各關(guān)節(jié)首末角度及運(yùn)動(dòng)時(shí)間,即可確定機(jī)器人電機(jī)輸出轉(zhuǎn)角、角速度隨時(shí)間的變化規(guī)律。表1為機(jī)器人關(guān)節(jié)轉(zhuǎn)角變化情況,設(shè)定運(yùn)動(dòng)時(shí)間為2.5s。機(jī)器人在運(yùn)動(dòng)首末端點(diǎn)的速度值均為0,得到三次多項(xiàng)式各項(xiàng)系數(shù)。

表2 運(yùn)動(dòng)仿真起始值與終止值
3.2.2 Simulink運(yùn)動(dòng)仿真分析
在機(jī)器人運(yùn)動(dòng)過程,機(jī)器人末端所受廣義外力為0,可將式(2)改寫為:

需要注意的是,式(4)中各項(xiàng)的剛度不同,在數(shù)值分析中,該種形式的微分方程被稱為剛性方程,又被稱為病態(tài)方程。病態(tài)方程的求解相較于通常的微分方程更為困難,MATLAB中的simulink仿真模塊包含多種求解方法,其中的ODE15s求解方法屬于一種多步預(yù)測(cè)算法,適合求解大剛度系統(tǒng)的微分方程。
在simulink中搭建仿真模型,可以得出機(jī)器人運(yùn)動(dòng)過程中及運(yùn)動(dòng)結(jié)束后,機(jī)器人各關(guān)節(jié)的變形情況及關(guān)節(jié)角度隨時(shí)間的變化情況,通過式(1)即可得到機(jī)器人末端位置在機(jī)器人基坐標(biāo)系中X、Y、Z三個(gè)軸方向的誤差值,如圖2所示。
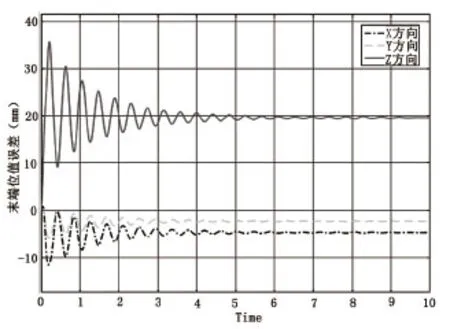
圖2 機(jī)器人末端振動(dòng)隨時(shí)間的變化規(guī)律
分析圖2可得,在機(jī)器人運(yùn)動(dòng)過程中,由于關(guān)節(jié)柔性的存在,機(jī)器人末端位置與理論位置之間存在誤差,該誤差隨著運(yùn)動(dòng)時(shí)間的延續(xù)表現(xiàn)為末端振動(dòng)情況。在運(yùn)動(dòng)結(jié)束后,機(jī)器人末端位置與理論位置并不重合,這是由于重力因素造成的。
4 結(jié)論
本文采用D-H參數(shù)建立了機(jī)器人連桿坐標(biāo)系,求得了機(jī)器人運(yùn)動(dòng)學(xué)模型。采用拉格朗日法建立了考慮關(guān)節(jié)柔性的機(jī)器人動(dòng)力學(xué)模型。在制定機(jī)器人各關(guān)節(jié)運(yùn)動(dòng)首末關(guān)節(jié)角度值和運(yùn)動(dòng)時(shí)間后,對(duì)機(jī)器人的運(yùn)動(dòng)軌跡在關(guān)節(jié)坐標(biāo)系內(nèi)進(jìn)行了三次多項(xiàng)式運(yùn)動(dòng)規(guī)劃。建立了simulink仿真模型,得出了機(jī)器人各關(guān)節(jié)角度在指定運(yùn)動(dòng)情況下的關(guān)節(jié)變形情況,并分析了機(jī)器人末端振動(dòng)情況,這對(duì)于工業(yè)機(jī)器人動(dòng)力學(xué)相關(guān)研究有一定的借鑒意義。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
