基于集成算法的路段短時(shí)行駛時(shí)間預(yù)測(cè)
2018-08-28 09:12:58蔣怡玥董蜀黔周淑敏
山東科學(xué) 2018年4期
蔣怡玥,董蜀黔,周淑敏
(1.北京交通大學(xué)交通運(yùn)輸學(xué)院,北京 100044;2.北京郵電大學(xué)信息與通信工程學(xué)院,北京 100876)
路段行駛時(shí)間是反映道路擁擠程度最為直觀的參數(shù)[1],是構(gòu)建交通信息服務(wù)系統(tǒng)、交通流誘導(dǎo)系統(tǒng)等ITS子系統(tǒng)的重要基礎(chǔ)。從道路管理者和出行者的角度來(lái)看,了解道路交通狀況并對(duì)其進(jìn)行短時(shí)預(yù)測(cè),在運(yùn)輸效率和可靠性方面都是值得關(guān)注的問(wèn)題。不僅可以輔助管理者應(yīng)對(duì)交通擁堵和實(shí)施應(yīng)急策略,還可以幫助出行者規(guī)劃自己的行程和路線,以避開(kāi)擁擠的路段,避免旅行延誤。時(shí)間尺度越小,實(shí)時(shí)性越好,越能真實(shí)反映路段的交通狀態(tài);但正是如此,路段行駛時(shí)間常呈現(xiàn)出強(qiáng)烈的波動(dòng),而這些快速變化往往是復(fù)雜且難以預(yù)測(cè)的。因此,基于交通信息建立算法模型,精準(zhǔn)預(yù)測(cè)各路段在某個(gè)時(shí)段的通行時(shí)間,對(duì)交通狀態(tài)波動(dòng)進(jìn)行預(yù)測(cè),有助于城市交通智能管控和社會(huì)智慧出行,是現(xiàn)在交通發(fā)展的大勢(shì)所趨。
行駛時(shí)間預(yù)測(cè)對(duì)于交通預(yù)測(cè)來(lái)說(shuō)一直是一個(gè)重要的研究領(lǐng)域,國(guó)內(nèi)外學(xué)者已經(jīng)將很多方法用于其中。由于交通狀態(tài)的動(dòng)態(tài)性和非線性,短時(shí)旅行時(shí)間的預(yù)測(cè)仍是一個(gè)非常有挑戰(zhàn)性的任務(wù)。現(xiàn)有的應(yīng)用于短時(shí)行駛時(shí)間預(yù)測(cè)的數(shù)據(jù)驅(qū)動(dòng)方法可分為兩大類,即參數(shù)方法和非參數(shù)方法。
參數(shù)方法主要有線性回歸模型[2]、時(shí)間序列模型,如卡爾曼濾波[3]、自回歸綜合移動(dòng)平均法[4]。在這些模型中,交通狀態(tài)本質(zhì)上假定為線性的。當(dāng)交通呈現(xiàn)有規(guī)律的變化時(shí)可以產(chǎn)生比較理想的預(yù)測(cè)結(jié)果,而對(duì)于波動(dòng)性較強(qiáng)和非線性的交通狀態(tài),這些方法計(jì)算耗時(shí)并且易產(chǎn)生較大的偏差。由于非參數(shù)方法對(duì)基本模型不做很強(qiáng)的假設(shè),應(yīng)用中相對(duì)具有優(yōu)勢(shì)[5]。其中,以神經(jīng)網(wǎng)絡(luò)為代表的方法對(duì)非線性關(guān)系的擬合能力使得其在交通預(yù)測(cè)方面得到了廣泛應(yīng)用[6]。神經(jīng)網(wǎng)絡(luò)算法具有較強(qiáng)的魯棒性和容錯(cuò)能力,但是神經(jīng)網(wǎng)絡(luò)缺乏解釋性,且對(duì)參數(shù)比較敏感,需要比較多的參數(shù)訓(xùn)練,訓(xùn)練時(shí)間過(guò)長(zhǎng),可能預(yù)測(cè)結(jié)果更差。
近年來(lái),在解決預(yù)測(cè)問(wèn)題方面,基于集成的算法被應(yīng)用于各個(gè)領(lǐng)域并取得了巨大的成功[7]。在各種不同的集成方法中,基于樹(shù)的集成方法是一種流行的集成方法,該方法將多個(gè)簡(jiǎn)單樹(shù)模型結(jié)合,優(yōu)化預(yù)測(cè)性能。基于樹(shù)的集成模型的可解釋性使得交通決策者能夠更好地理解模型的輸出,并且便于分析交通量之間的影響因素。這些特性使得基于樹(shù)的集成方法在解決交通問(wèn)題方面具有很好的應(yīng)用前景。Hamner[8]將隨機(jī)森林(random forest,RF)應(yīng)用于旅行時(shí)間預(yù)測(cè)中并在IEEE ICDM比賽中表現(xiàn)最佳,相比于其他算法具有明顯優(yōu)勢(shì)。梯度提升樹(shù)(gradient boosting decision tree,GBDT)與傳統(tǒng)的統(tǒng)計(jì)方法和其他集成方法相比,在預(yù)測(cè)精度方面具有優(yōu)越的性能。Zhang等[9]首次將梯度提升樹(shù)應(yīng)用于旅行時(shí)間預(yù)測(cè),并得到了很好的結(jié)果,尤其是在交通狀況發(fā)生突變時(shí)。
盡管在高速公路交通預(yù)測(cè)方面已經(jīng)做了大量工作,但其中基于樹(shù)的集成方法在短時(shí)交通預(yù)測(cè)中應(yīng)用十分有限。路段行駛時(shí)間隨時(shí)間的變化波動(dòng)很大,而天氣、節(jié)假日等非線性因素都會(huì)對(duì)路段行駛時(shí)間造成影響,時(shí)間尺度較小時(shí),其不確定性和時(shí)變性較強(qiáng)[10]。基于樹(shù)的集成方法得到的結(jié)果可解釋性較強(qiáng),不僅能夠處理不同類型的預(yù)測(cè)變量,并且可以較好地?cái)M合復(fù)雜的非線性關(guān)系,可直接通過(guò)原始數(shù)據(jù)預(yù)測(cè)路段行駛時(shí)間,因此更加適合路段行駛時(shí)間的短時(shí)預(yù)測(cè)。在機(jī)器學(xué)習(xí)中,基于樹(shù)的集成方法通常比傳統(tǒng)的統(tǒng)計(jì)方法具有更好的預(yù)測(cè)性能。本文提出了一個(gè)基于樹(shù)的集成方法來(lái)預(yù)測(cè)短時(shí)的路段行駛時(shí)間。首先針對(duì)小時(shí)間尺度下交通時(shí)變性強(qiáng)這一特性,通過(guò)對(duì)其損失函數(shù)的改造得到一個(gè)更加魯棒的GBDT,并與RF進(jìn)行融合。其次考慮各種歷史旅行時(shí)間數(shù)據(jù)的相關(guān)變量,以揭示影響旅行時(shí)間波動(dòng)的重要因素。最后,比較了不同方法的預(yù)測(cè)準(zhǔn)確性及算法穩(wěn)定性。
1 數(shù)據(jù)分析
1.1 數(shù)據(jù)描述
本文數(shù)據(jù)來(lái)源于天池大數(shù)據(jù)競(jìng)賽中智慧交通預(yù)測(cè)挑戰(zhàn)賽。數(shù)據(jù)集中記錄了城市關(guān)鍵路段的屬性信息、路段間網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),以及歷史每天以2 min為一個(gè)間隔的每條路段上的平均旅行時(shí)間。提供2017年4月至2017年6月132條路段以2 min為一個(gè)時(shí)間窗的覆蓋全天的旅行時(shí)間數(shù)據(jù)。
1.2 數(shù)據(jù)處理
缺失值利用歷史相同時(shí)間片的行駛時(shí)間進(jìn)行補(bǔ)充。由于均值可能受到統(tǒng)計(jì)樣本中極端值的影響,因此本文使用數(shù)據(jù)集中觀察到的路段旅行時(shí)間的中位數(shù)進(jìn)行缺失數(shù)據(jù)填充,具體缺失數(shù)據(jù)填充流程見(jiàn)圖1。
1.3 特征工程
表1是本文所選取數(shù)據(jù)集特征的一個(gè)示例,其中in_tt和out_tt分別表示車輛經(jīng)過(guò)與該路段相鄰的上、下游路段的行駛時(shí)間;length,width分別表示該路段的路段屬性(長(zhǎng)、寬);of_day表示車輛通過(guò)該路段的不同時(shí)間段;of_week的索引從1到7代表從星期一到星期日;pretime表示與上一個(gè)時(shí)間段車輛經(jīng)過(guò)該路段的行駛時(shí)間,t2-t1表示連續(xù)兩個(gè)時(shí)間段的行駛時(shí)間變化率;最后將天氣(weather)也作為考慮因素加入特征中。
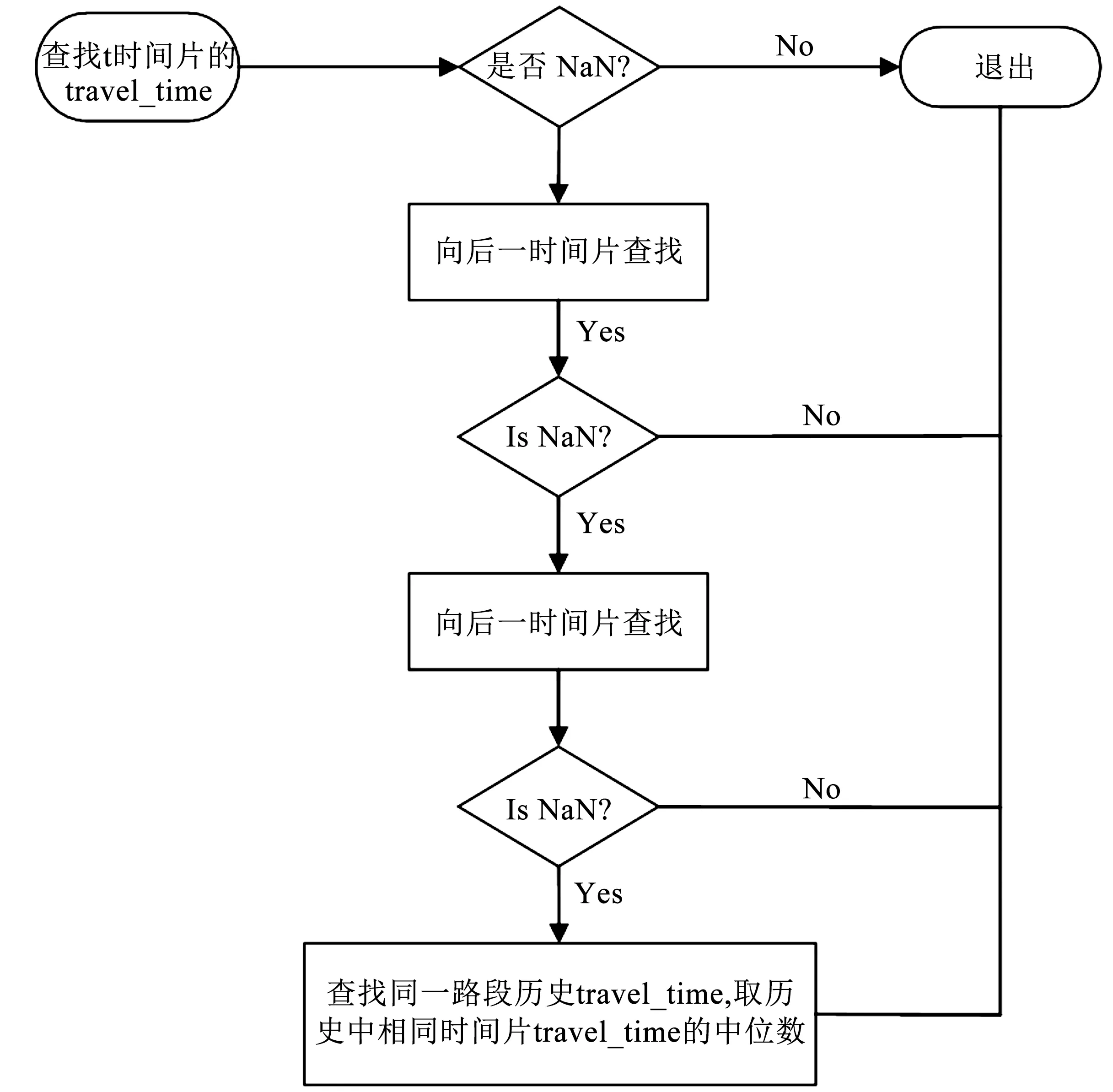
圖1 缺失數(shù)據(jù)填充流程圖Fig.1 The process of filling the missing data
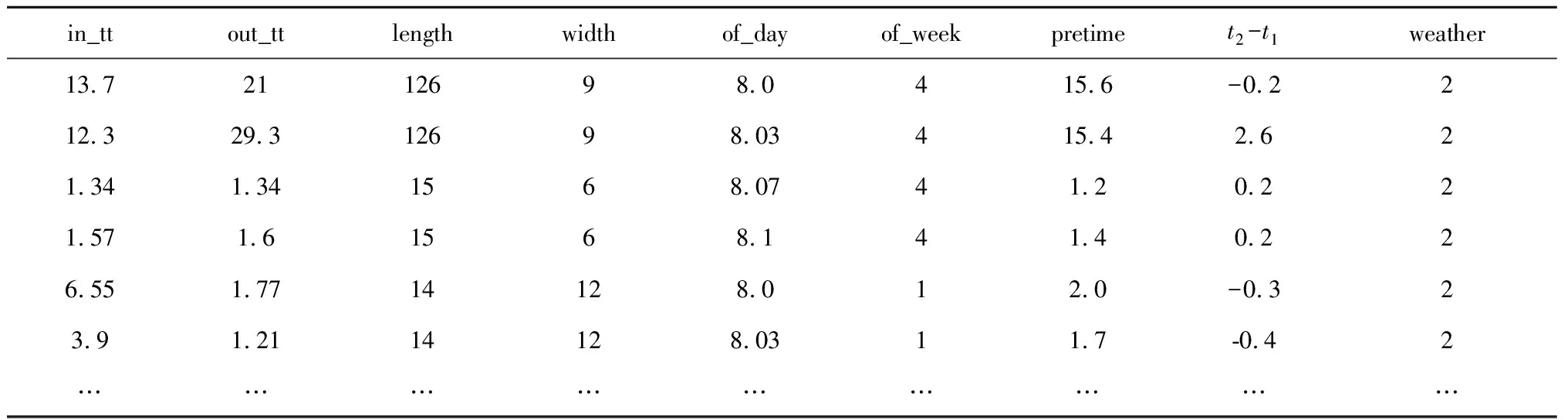
表1 數(shù)據(jù)集實(shí)例Table 1 Example of the data set
2 理論方法
2.1 隨機(jī)森林(RF)法
Breiman等[11]結(jié)合Boostrap重采樣技術(shù)和Random Subspace Method提出RF,RF是由多個(gè)決策樹(shù)構(gòu)成的森林。決策樹(shù)在生成的過(guò)程中首先分別在行方向和列方向上添加隨機(jī)過(guò)程,行方向上構(gòu)建決策樹(shù)時(shí)采用自助抽樣得到訓(xùn)練數(shù)據(jù),列方向上采用無(wú)放回隨機(jī)抽樣得到特征子集,并據(jù)此得到其最優(yōu)切分點(diǎn);之后就是對(duì)采樣之后的數(shù)據(jù)使用完全分裂的方式建立出決策樹(shù);每棵決策樹(shù)都最大可能地進(jìn)行生長(zhǎng)而不進(jìn)行剪枝(由于之前的兩個(gè)隨機(jī)采樣的過(guò)程保證了隨機(jī)性,所以就算不剪枝,也不會(huì)出現(xiàn)過(guò)擬合);最后通過(guò)對(duì)所有的決策樹(shù)進(jìn)行加總來(lái)預(yù)測(cè)新的數(shù)據(jù)。
2.2 梯度提升樹(shù)法(GBDT)
梯度提升的觀點(diǎn)是基于Boosting算法提出的一個(gè)改進(jìn)[12]。假設(shè)yi,i=1,2,…,n代表i時(shí)刻某路段實(shí)際行駛時(shí)間的觀測(cè)值,迭代輪數(shù)為t=1,2,…,T,則ft-1(xi)表示第t-1輪i時(shí)刻路段行駛時(shí)間的預(yù)測(cè)值。Freidman[13]提出了用損失函數(shù)的負(fù)梯度來(lái)擬合本輪損失的近似值,進(jìn)而擬合一個(gè)回歸樹(shù)。其中,第t輪的i時(shí)刻的損失函數(shù)的負(fù)梯度表示為:
。
(1)
因此GBDT的目標(biāo)是,找到損失函數(shù)是L(·)使本輪損失最小:
(2)
Freidman[13]將損失函數(shù)定義為:
。
(3)
則可以求得第t輪的i時(shí)刻損失函數(shù)的負(fù)梯度:
。
(4)
也就是說(shuō)GBDT中的梯度方向?qū)?yīng)于i時(shí)刻某路段行駛時(shí)間的觀測(cè)值與預(yù)測(cè)值之差,即“殘差”,由此可以看出GBDT每一輪產(chǎn)生的殘差作為下一輪回歸樹(shù)的輸入,下一輪的回歸樹(shù)的目的就是盡可能地?cái)M合這個(gè)輸入的殘差。
2.3 魯棒的GBDT
GBDT通過(guò)在每一輪梯度方向上減少殘差,以提高模型性能。而在過(guò)程中容易受到突變點(diǎn)的影響,對(duì)突變點(diǎn)就會(huì)很敏感,因此對(duì)于小時(shí)間尺度下劇烈波動(dòng)的交通狀況,可能會(huì)表現(xiàn)不佳。本文針對(duì)這一問(wèn)題,選擇了不同的損失函數(shù),以抑制突變點(diǎn)的影響,得到更加穩(wěn)健的GBDT。
(5)
令損失函數(shù)L(·)為:
(6)
其中,變量w表示觀察值與預(yù)測(cè)值之差,即殘差;m為參數(shù)。
這個(gè)函數(shù)表示對(duì)于殘差w值較小的點(diǎn),其損失函數(shù)是二次的,而對(duì)于w值較大的點(diǎn)其損失函數(shù)是線性的,這種方法有助于減少突變點(diǎn)對(duì)交通預(yù)測(cè)的影響。
2.4 RF-GBDT回歸
偏差(Bias)度量了學(xué)習(xí)算法的期望預(yù)測(cè)與真實(shí)結(jié)果的偏離程度;方差(Variance)度量了同樣大小訓(xùn)練集的變動(dòng)所導(dǎo)致的學(xué)習(xí)性能的變化。泛化性能是由偏差和方差共同決定的,從圖2刻畫的泛化誤差與偏差、方差的關(guān)系,可以看出,偏差與方差之間是存在沖突的,即當(dāng)學(xué)習(xí)器擬合能力不夠強(qiáng)時(shí),訓(xùn)練數(shù)據(jù)的擾動(dòng)不足以使學(xué)習(xí)器產(chǎn)生顯著變化,此時(shí)偏差主導(dǎo)泛化錯(cuò)誤率;而當(dāng)學(xué)習(xí)器的擬合能力足夠強(qiáng)時(shí),訓(xùn)練數(shù)據(jù)的輕微擾動(dòng)會(huì)導(dǎo)致學(xué)習(xí)器發(fā)生顯著變化,此時(shí)方差主導(dǎo)泛化錯(cuò)誤率。這就是所謂的偏差-方差窘境。
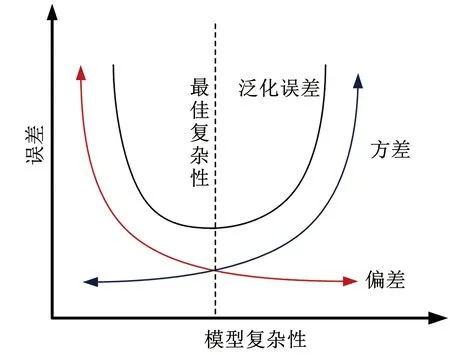
圖2 泛化誤差與偏差、方差的關(guān)系示意圖Fig.5 The relationship between total error and bias, variance
從前文的分析發(fā)現(xiàn)對(duì)于RF,其核心就是自采樣(樣本隨機(jī))和屬性隨機(jī),屬于樣本數(shù)相同下的不同訓(xùn)練集產(chǎn)生的預(yù)測(cè)結(jié)果,即數(shù)據(jù)的擾動(dòng)導(dǎo)致模型學(xué)習(xí)性能的變化,因此RF主要關(guān)注降低方差提高模型性能;而對(duì)于GBDT,其核心是擬合損失函數(shù)梯度,而損失函數(shù)的定義就決定了在子區(qū)域內(nèi)各個(gè)步長(zhǎng),其中就是期望輸出與預(yù)測(cè)輸出的差,因此GBDT主要關(guān)注降低偏差提高模型性能。另外,當(dāng)樹(shù)的數(shù)量足夠多時(shí),RF不會(huì)產(chǎn)生過(guò)擬合,提高樹(shù)的數(shù)量能夠使得錯(cuò)誤率降低;而GBDT的每棵樹(shù)是按順序生成的,每棵樹(shù)生成時(shí)都需要利用之前一棵樹(shù)留下的信息,樹(shù)的數(shù)目過(guò)多時(shí)會(huì)引起過(guò)擬合。
因此,本文考慮在進(jìn)行預(yù)測(cè)時(shí),將RF與魯棒的GBDT進(jìn)行結(jié)合,彼此優(yōu)勢(shì)互補(bǔ),使得新的模型能夠克服過(guò)擬合現(xiàn)象,同時(shí)兼顧偏差-方差,以產(chǎn)生更好的效果。在本文中,將RF和魯棒的GBDT進(jìn)行融合得到RF-GBDT,并將其應(yīng)用到路段行駛時(shí)間預(yù)測(cè)中。RF-GBDT算法過(guò)程如下。
輸入:訓(xùn)練集D={(x1,y1),(x2,y2),…,(xm,ym)};
初級(jí)學(xué)習(xí)算法:RF;
次級(jí)學(xué)習(xí)算法:GBDT.
過(guò)程:
h=RF(D);
D'=φ;
for i=1,2,…,m do
zi=h(xi);
D'=D'∪(zi,yi);
end for
h'=GBDT(D');
輸出:H(x)=h'(h(x)).
圖3是生成RF-GBDT并進(jìn)行預(yù)測(cè)的具體流程。值得一提的是,在訓(xùn)練階段,GBDT的訓(xùn)練集是利用RF產(chǎn)生的,若直接使用,過(guò)擬合的風(fēng)險(xiǎn)較大,因此本文使用交叉驗(yàn)證法,用RF未使用的樣本來(lái)產(chǎn)生GBDT的訓(xùn)練樣本。
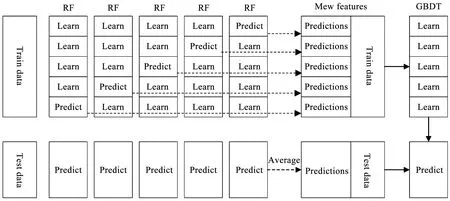
圖3 RF-GBDT流程示意圖Fig.3 The process of RF-GBDT
具體步驟如下:

3 結(jié)果
3.1 評(píng)價(jià)指標(biāo)
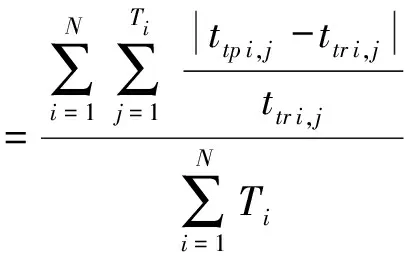
評(píng)價(jià)指標(biāo)采用平均絕對(duì)百分誤差(mean absolute percent error,MAPE),計(jì)算公式如下:
(7)
其中:ttp:預(yù)測(cè)的行駛時(shí)間;ttr:真實(shí)的行駛時(shí)間;N:預(yù)測(cè)路段數(shù)量;Ti:第i個(gè)路段上的預(yù)測(cè)時(shí)間片數(shù)量;MAPE值越低說(shuō)明模型準(zhǔn)確度越高。
3.2 變量解釋
為了檢測(cè)本文所提算法的精度和穩(wěn)定性,利用已知數(shù)據(jù)對(duì)2017年7月早高峰8:00—9:00、日平峰15:00—16:00和晚高峰18:00—19:00 三個(gè)時(shí)段中各一個(gè)小時(shí)的數(shù)據(jù)(以2 min為粒度)進(jìn)行短時(shí)預(yù)測(cè)。根據(jù)處理之后的數(shù)據(jù),分別使用RF、GBDG、RF-GBDT進(jìn)行預(yù)測(cè)。其中,在使用RF-GBDT進(jìn)行預(yù)測(cè)時(shí),一般來(lái)說(shuō),k值越大其穩(wěn)定性和保真性越好,但是效率也會(huì)隨之減少;經(jīng)過(guò)測(cè)試,k=5時(shí),可同時(shí)滿足穩(wěn)定性和效率要求。
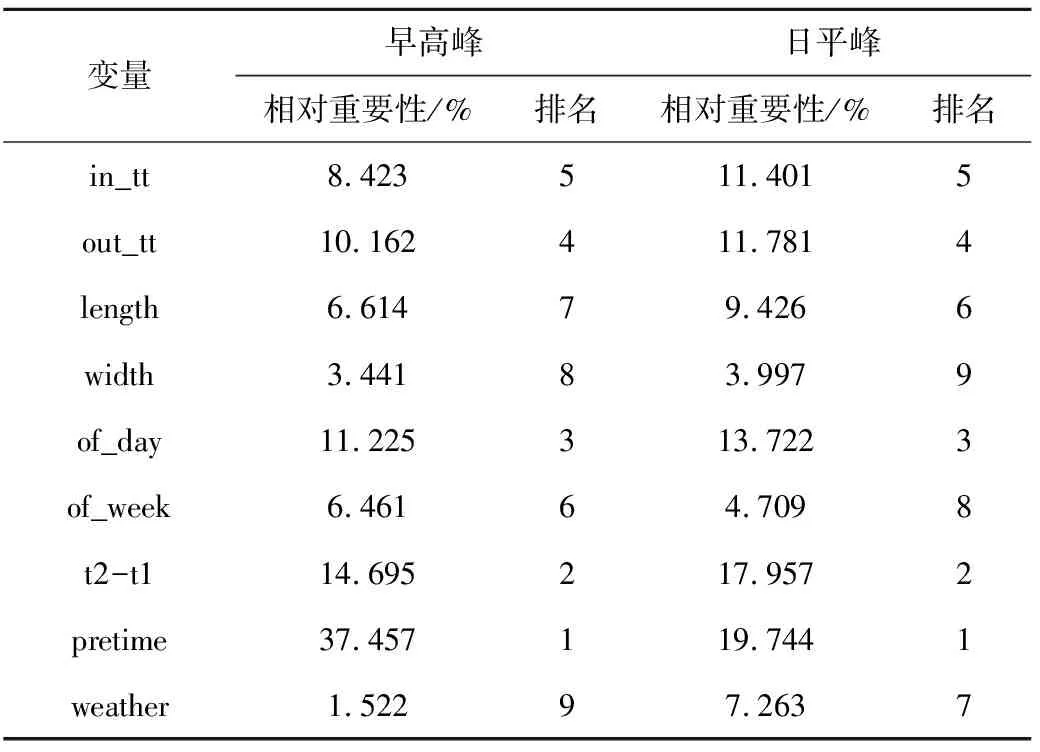
表2 輸入變量對(duì)預(yù)測(cè)結(jié)果的相對(duì)影響Table 2 Relative influence of input variables on prediction
表2給出了每個(gè)輸入變量對(duì)模型輸出的相對(duì)影響。很明顯,每個(gè)輸入變量對(duì)模型的輸出有不同的貢獻(xiàn)。在兩個(gè)情況下,上一個(gè)時(shí)間段車輛經(jīng)過(guò)該路段的行駛時(shí)間pretime對(duì)于行駛時(shí)間的預(yù)測(cè)貢獻(xiàn)最大,事實(shí)也是如此,路段上一時(shí)間段的交通狀況影響之后的交通,與未來(lái)的行駛時(shí)間密切相關(guān)。行駛時(shí)間變化率t2-t1對(duì)模型輸出也有較大的影響,其表示了交通的變化,其中一個(gè)正的t2-t1值,表示行駛時(shí)間具有增加的趨勢(shì),t2-t1值與交通擁擠正相關(guān)。我們可以看出,車輛在相鄰路段的行駛時(shí)間也很大程度影響該路段的行駛時(shí)間;另外相比于早高峰,路段本身的屬性在日平峰對(duì)行駛時(shí)間的影響有所提升,這與日平峰道路交通狀況良好有關(guān);而天氣對(duì)早高峰的作用很微弱,這是因?yàn)樵绺叻宄鲂械闹饕康臑橥ㄇ凇?/p>
3.3 預(yù)測(cè)結(jié)果
根據(jù)預(yù)測(cè)結(jié)果輸出MAPE值并繪制三個(gè)時(shí)段不同預(yù)測(cè)周期不同方法下的MAPE對(duì)比圖。圖4代表7月份上半月早高峰、日平峰和晚高峰的MAPE值。從圖中我們可以看出,總的來(lái)說(shuō),RF的預(yù)測(cè)效果不如GBDT,特別是在早晚高峰交通狀況變化劇烈時(shí),GBDT尤其好于RF,這從側(cè)面反應(yīng)了GBDT的魯棒性較好,能夠較好地反映交通的劇烈變化;而在早晚高峰和日平峰兩種交通狀態(tài)下,RF-GBDT的預(yù)測(cè)效果均為最佳,特別是在交通狀況變化劇烈時(shí)。圖5表示7月1日—7月15日及7月1日—7月31日三個(gè)時(shí)段平均MAPE值。從圖中不難看出,RF-GBDT的預(yù)測(cè)效果明顯好于RF和GBDT。而預(yù)測(cè)周期增加之后,MAPE隨之增大,精度有所下降,也就是說(shuō)預(yù)測(cè)周期越長(zhǎng),越難以捕捉復(fù)雜的交通狀況;對(duì)于RF-GBDT,雖然其MAPE有所上升,但上升幅度最小。從預(yù)測(cè)周期和交通狀況兩個(gè)方面的預(yù)測(cè)結(jié)果,RF-GBDT在精度和穩(wěn)定性上都優(yōu)于單獨(dú)的RF或GBDT。

圖4 7月1日—7月15日分時(shí)段輸出MAPE對(duì)比圖Fig.4 The comparison of three periods’ MAPE from July 1st to 15th
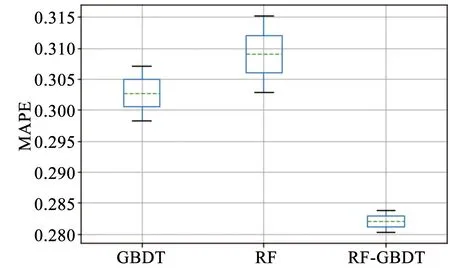
圖5 7月1日—7月15日與7月1日—7月31日三個(gè)時(shí)段平均MAPE對(duì)比圖Fig.5 The comparison of average MAPE from July 1st to 15th and July 1st to July 31st
4 結(jié)語(yǔ)
本文以2 min為預(yù)測(cè)時(shí)間尺度,以實(shí)際路段行駛時(shí)間為基礎(chǔ),將在回歸預(yù)測(cè)領(lǐng)域表現(xiàn)良好,并且效率較高的兩個(gè)以RF和GBDT為代表的基于樹(shù)的集成學(xué)習(xí)方法,應(yīng)用到路段行駛時(shí)間的短時(shí)預(yù)測(cè)中。為了使GBDT能夠較好地反映劇烈變化的交通情況,對(duì)其損失函數(shù)進(jìn)行了處理。在偏差-方差方面,為了提高模型性能,RF主要關(guān)注降低方差;而對(duì)于GBDT,其主要關(guān)注降低偏差。因此,提出一種改進(jìn)的RF-GBDT算法。
在對(duì)路段行駛時(shí)間進(jìn)行短時(shí)預(yù)測(cè)的過(guò)程中,考慮了天氣對(duì)交通的影響。本文分別使用RF、GBDT、RF-GBDT對(duì)比不同預(yù)測(cè)周期、不同交通狀況下輸出的MAPE值,并對(duì)變量進(jìn)行解釋。實(shí)驗(yàn)結(jié)果表明,RF-GBDT能夠有效應(yīng)對(duì)交通狀況劇烈變化并進(jìn)行預(yù)測(cè),無(wú)論是在精度還是在算法穩(wěn)定性方面,RF-GBDT都表現(xiàn)出了優(yōu)越性。
本文所提方法在對(duì)短時(shí)的路段行駛時(shí)間進(jìn)行預(yù)測(cè)時(shí),雖然預(yù)測(cè)結(jié)果得到了改進(jìn),但是在進(jìn)行方法融合的過(guò)程中,其計(jì)算成本也會(huì)隨之增加,日后可以從這個(gè)方面進(jìn)行提升。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56