基于無線遙控的腿履復合型起重機器人控制系統研究
2018-08-28 09:13:06王亞麗閆九祥張國輝魏盼盼
山東科學 2018年4期
關鍵詞:發動機
王亞麗,閆九祥,張國輝,魏盼盼
(1.齊魯工業大學(山東省科學院),山東省科學院自動化研究所,山東省機器人與制造自動化技術重點實驗室,山東 濟南 250014;2.山東魯班機械科技有限公司,山東 滕州,277500)
隨著生產規模和自動化程度的不斷提高,起重機作為物料搬運的重要裝備,在現代化生產中應用日益廣泛。因此,起重機的設計也在向智能化、大型化和微型化等方面快速發展。起重機擁有的基本的載荷、力矩限制功能,已經不能滿足需求,用戶希望獲得更多關于起重機狀態的準確信息,包括起升高度、風速、起升角度、油溫、發動機的狀態、車身平整度等;同時,希望起重機具有較強的自動控制和自診斷能力,以此降低操作和維護的工作量并保證起重機的安全可靠性。無線遙控技術是一種利用無線遙控器發送頻率、幅度、相位等特殊指令,進行機械設備遠程控制的技術[1]。國外對無線遙控起重機的研究多集中于大型橋式起重機,小型的起重機器人雖然已經具備遙控功能,但也僅限于實現簡單的吊裝動作,不具有自動調平等高級功能;國內高校和科研院所也僅僅限于局部和理論研究;一些生產起重機的制造商,也在研究開發智能起重機,但也尚未有穩定可靠的產品應用于生產[2]。
針對上述問題,本課題組開發設計了基于無線遙控的腿履復合型智能起重機器人。腿履復合型智能起重機器人屬于起重機智能化、微型化的產物,行走和運輸狀態時支腿收緊、結構緊湊、機動性好,作業狀態時支腿伸開跨度較大、穩定性高。機器人具有本體的自動調平功能,使機器人在工作過程中實時調整姿態,達到防傾翻的作用。還具有發動機的輸出功率自動控制功能,使機器人在工作過程中能根據負載及工作狀況來實時控制發動機的輸出,達到節約能耗的目的。基于無線遙控的機器人控制系統,能最大限度地擴大控制距離,提高機器人工作的可靠性和安全性,減輕操作人員的工作負擔,操作人員與機器人距離較遠時仍可完成吊裝工作,為現場工作帶來便利,具有相當的社會、經濟意義和廣闊的應用前景[3]。本文采用無線遙控技術以及內嵌控制算法,建立了一種新型腿履復合型起重機器人無線智能遙控系統,最終實現行走中防碰撞、起重作業防傾翻、吊具精準定位、發動機的控制、危險規避、安全監控和故障診斷等方面的數字化智能控制。
1 系統結構
腿履復合型起重機器人由履帶式底盤、機架、支腿、回轉機構、變幅機構、起升機構、伸縮吊臂等組成。履帶底盤由四輪一帶(驅動輪、導向輪、托帶輪、支重輪、橡膠履帶)和行走馬達及減速機、下車架等組成,行走馬達為變量型,與負載敏感變量液壓泵配合可實現無級變速,橡膠底盤用來承載吊車和實現吊車行走;機架用來安裝底盤其他部件、發動機、吊機和支腿;支腿為蜘蛛型,分布在機架四角,行走和運輸狀態折疊收起,放置于機架兩側,吊重作業時伸開,并可根據作業空間調節支腿跨度,極大地增加作業穩定性;回轉機構由一體式渦輪蝸桿型回轉支承、回轉馬達、中央回轉接頭等組成,安裝于機架一端,可實現吊機部分平穩回轉和制動;變幅機構由變幅油缸、平衡閥等組成,用于吊臂改變作業幅度;起升機構由起升絞車、起升馬達、平衡閥、起升鋼絲繩及吊鉤組件等組成,用于貨物吊裝作業;伸縮吊臂由一級臂、二級臂、三級臂、四級臂、五級臂、伸縮臂油缸及平衡閥、伸縮臂繩索及滑輪組、滑塊等組成,通過伸縮臂油缸伸縮,依次帶動二、三、四、五級臂伸縮,從而實現吊車不同高度、幅度吊裝需求。該機器人主要結構如圖1所示。
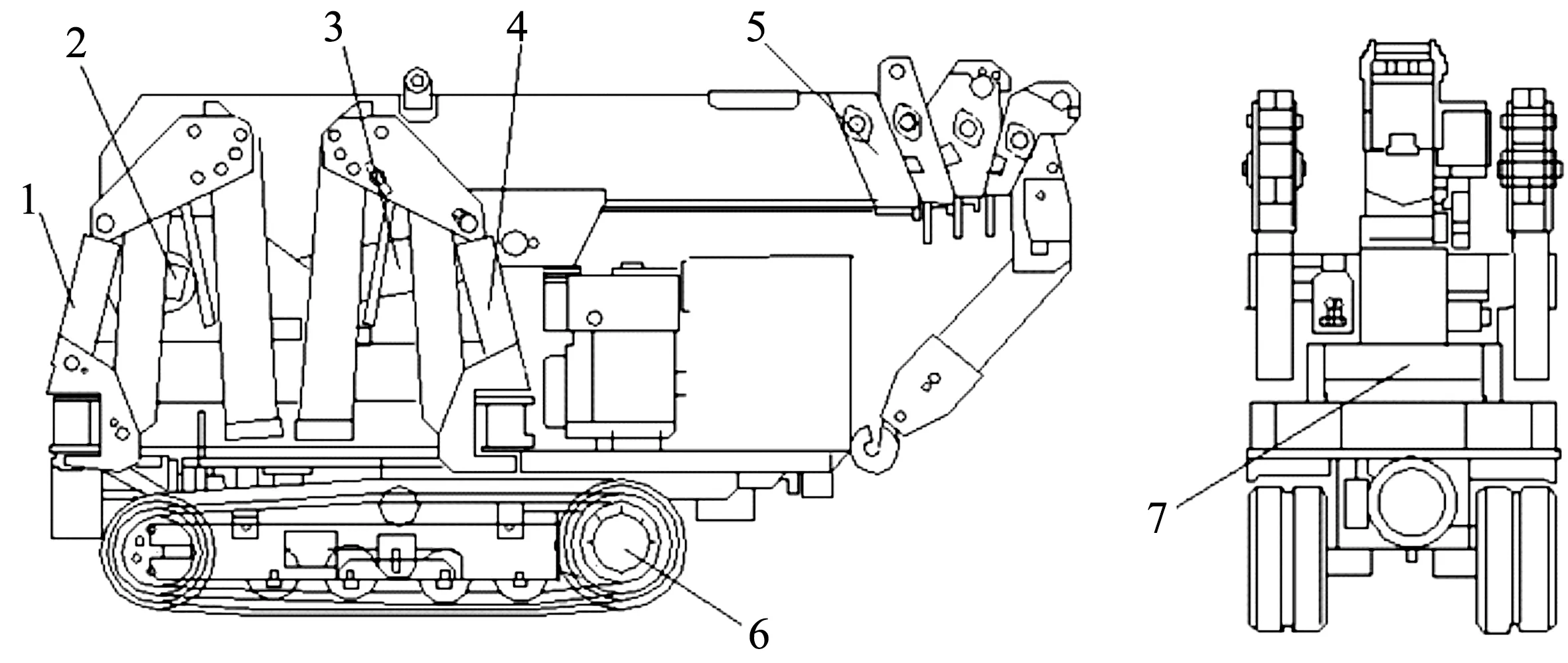
1右后支腿液壓缸;2起升馬達;3變幅液壓缸;4右前支腿液壓缸;5伸縮臂液壓缸;6右行走馬達;7主臂回轉液壓缸。圖1 腿履復合起重機器人結構Fig.1 Mechanical construction of leg-track complex hoisting robots
2 控制系統實現
腿履復合型智能起重機器人的控制系統包括液壓回路系統和電氣控制系統兩部分。
液壓回路系統包括發動機、液壓泵、液壓缸、液壓馬達、電控液壓比例閥等。發動機是動力源,發動機帶動液壓泵轉動[4],液壓泵根據電控液壓比例閥組中比例閥開口度變化,輸出液壓油驅動各執行機構動作,進而實現起重機器人的吊裝作業、吊裝回轉和行走作業等[5]。能實現直線往復運動的液壓缸和能實現往復旋轉運動的液壓馬達是機器人液壓系統執行元件[6]。液壓缸和液壓馬達的速度和方向是由電控液壓比例閥控制,但是,由于負載壓力和油源壓力是一直變化的,要達到理想中的油缸速度和馬達轉速,必須由最佳的主控制閥開度與平衡閥開啟壓力相配合來實現。因此,在液壓缸和液壓馬達輸入端要加裝平衡閥來增加系統的平穩性和安全性[7-8]。
機器人分為手柄操作和遠程遙控操作兩種模式。手柄操作模式為操作人員通過操作機器人閥體上的手柄直接控制每一個執行元件;遠程遙控操作為操作人員站在距離機器人幾十米甚至上百米的遠處,通過無線遙控器來控制各個執行元件的動作,并且可以自動進行機器人本體的平衡調節。由于起重機器人多工作在比較惡劣的環境,沙塵、振動等外界因素都要求控制系統具有可靠性高、抗干擾能力強等特點,因此,機器人選用工程機械專用的控制器。控制器作為整個控制系統的核心,主要用于接收各類傳感器采集的數據,并對所采集的數據進行濾波、分析和處理,根據機器人的動作要求生成相應的指令來控制機器人作業。機器人的不同功能要求,均是通過不同的控制算法來實現。控制系統采用CAN總線作為通訊方式,遙控器、顯示器、發動機控制單元和控制器都具有CAN通訊功能,極大地提高了系統的效率和可靠性。電氣控制系統組成方案如圖2所示。

圖2 腿履復合型起重機器人控制系統方案Fig.2 Control-system scheme of leg-track complex hoisting robots
整個控制系統實現的主要功能包括機器人本體的自動調平和根據實際需求自動調節發動機輸出功率的節能控制。
2.1 機器人本體的自動調平
由于地面的不平整以及地面硬度的影響,致使機器人本體工作時處于不平衡狀態,會影響機器人的工作安全性。實現任何狀態下的車身自動調平是行走類機械的共性關鍵技術。控制系統通過圖3中的雙閉環反饋來對本體的平衡進行調節,當調節能力不能滿足要求時,將進行報警及停止工作。本體采用四只對稱布置的可伸縮支腿,每個支腿上均由液壓缸來控制伸縮狀態。機器人本體上安裝雙軸傾角傳感器來檢測機器人是否處于平面狀態,根據本體的姿態反饋,控制器將采集到的數據利用調平算法進行處理并轉換成控制信號輸出給電控比例液壓閥,電控比例液壓閥再來控制液壓缸的動作,整個控制過程通過調平算法實現平穩快速的響應,使機器人本體始終維持在一個相對的平面內。控制原理見圖3。
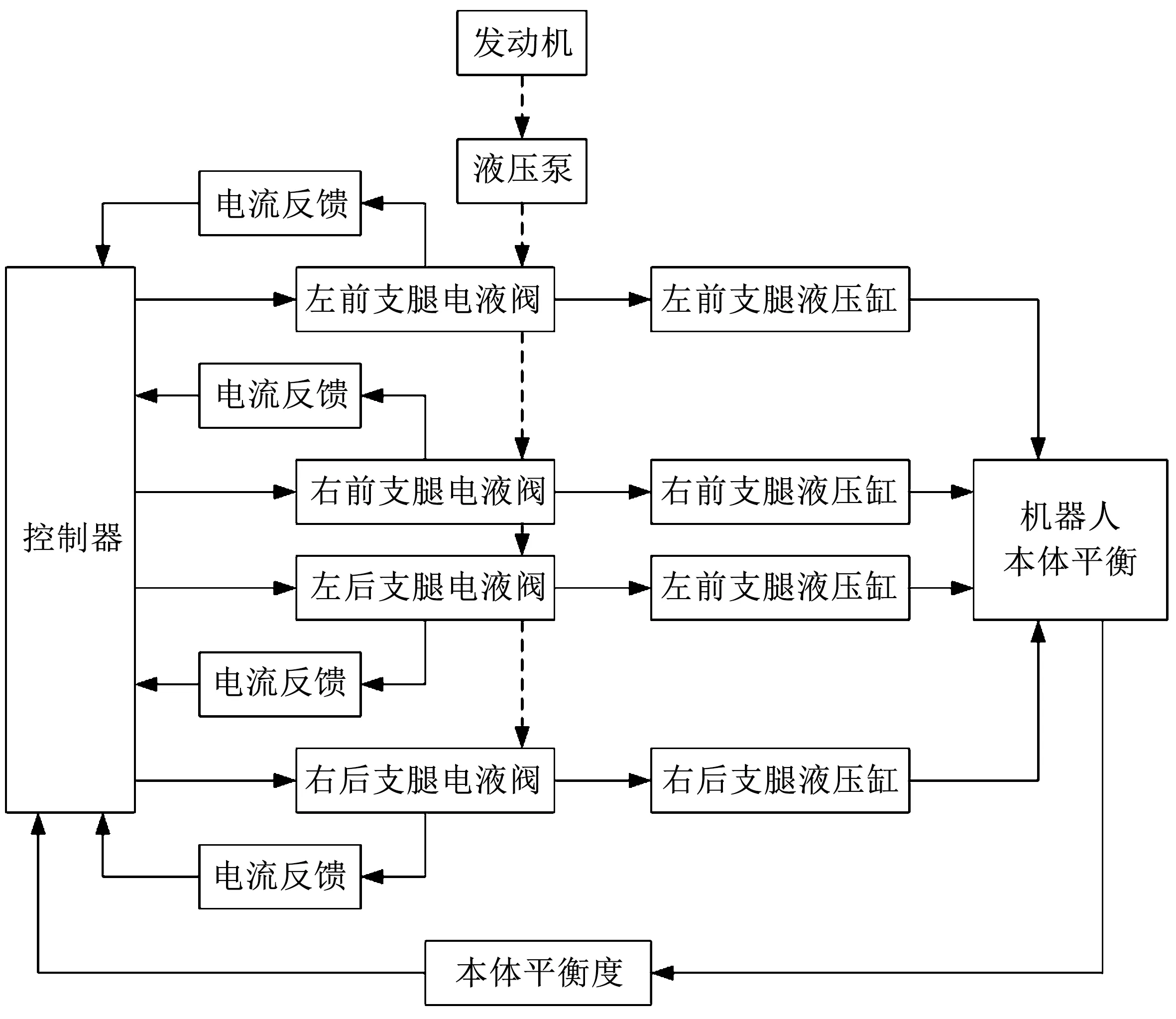
圖3 機器人本體調平原理圖Fig.3 The principle diagram of the body levelling of robot
2.2 發動機輸出功率的自動調節
根據節能減排的需求,采用抗流量飽和負載敏感技術來搭建整個節能液壓控制系統,同時采用電控比例液壓閥來實現各部件的速度控制,提高系統的穩定性和柔和性。為適應不同的工況,在保證輸出動力的情況下,加入作業循環階段智能識別技術,以主泵的工作壓力為依據,將發動機、變量泵、多路閥和負載作為一個整體,采用協調控制策略,對發動機的轉速進行控制,最終實現準確地對發動機-泵-負載環節的功率進行協調匹配,提高了動力系統功率利用率,減少了系統能量損失,達到匹配功率的目的。針對發動機控制環節,以主控制器的指令為標準下達到發動機控制器,再由發動機控制器直接控制油門直線電機來實現功率的調節。發動機調節控制原理詳見圖4。

圖4 發動機調節控制原理圖Fig.4 Schematic diagram of engine regulation and control
3 機器人系統軟件設計
主程序設計采用模塊化設計,系統的軟件如圖5所示。

圖5 控制程序流程圖Fig.5 Flow-process diagram of control program
圖5中的參數初始化模塊完成機器人所有電控液壓比例閥的啟動電流和最大電流參數的存儲和讀取功能;無線接收模塊將無線遙控器發送過來的數據進行解析,并發送給其他模塊進行執行,同時還要將數據發送到無線遙控器進行顯示;數據采集模塊將主控器采集到的開關量和模擬量進行處理,并提供給機器人作業控制模塊、機器人本體調平模塊和發動機調節控制模塊來使用;機器人作業控制模塊是把無線遙控器上手柄的輸入信號轉換成控制信號輸出到電控液壓比例閥上,實現各執行元件的動作;機器人本體調平模塊是在機器人作業過程中,根據機器人本體的水平度來調節各支腿的姿態,使機器人保持在一個相對水平的狀態;發動機調節控制模塊根據監測結果對發動機的油門電機進行控制,實現發動機輸出功率的控制。機器人持續不斷地進行監測和動作,最終實現智能的起重作業。
4 測試結果
通過以上研究,設計開發出了機器人樣機,并在此機器人的本體上進行了多項測試,具體測試結果見表1。

表1 測試結果Table 1 Test results
由表1結果可知,機器人在作業過程中實現了自動調平以及節約能耗的目的,并且無線遙控距離達到安全操作的要求。
5 結語
腿履復合型智能起重機器人的開發,完全擺脫了操作人員在車上操作的弊端。無線遙控的操作模式,減輕了操作者的勞動強度,并且優化了操作者的視野,提高了操作者的安全性。基于CAN總線設計的控制系統,提高了系統的穩定性,減少了線纜的敷設。主控制器會根據機器人的不同工況選擇不同的發電機檔位,實現節省油耗的目的,機器人對發動機的輸出控制節約了能源,提高了資源的利用率。機器人本體平衡的調節提高了機器人工作的安全性,對于安全作業具有極其重大的意義。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15