基于ZigBee的校園路燈物聯(lián)網(wǎng)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2018-08-29 06:44:56侯黎陽(yáng)
自動(dòng)化與儀表 2018年8期
劉 暢,侯黎陽(yáng)
(河南大學(xué) 計(jì)算機(jī)與信息工程學(xué)院,開(kāi)封 475004)
隨著我國(guó)社會(huì)經(jīng)濟(jì)科技各方面發(fā)展愈加迅速,對(duì)道路照明系統(tǒng)的要求也越來(lái)越高[1],逐漸向精細(xì)化管理、智能化控制等方向發(fā)展。路燈在許多場(chǎng)合都是數(shù)量多密度度高的基礎(chǔ)設(shè)施,對(duì)于道路的功能實(shí)現(xiàn)有重大意義,隨著智能城市體[2]、節(jié)能化[3-4]、信息化[5]的提出和實(shí)施,傳統(tǒng)的路燈控制方式智能化控制程度不高、路燈的管理效率低下、無(wú)法根據(jù)實(shí)際需要及時(shí)對(duì)路燈的開(kāi)關(guān)進(jìn)行控制[6]等問(wèn)題越來(lái)越突出。
對(duì)于高校等路燈應(yīng)用數(shù)量和范圍較為集中的中小范圍場(chǎng)所,為改善傳統(tǒng)路燈的諸多缺點(diǎn),將物聯(lián)網(wǎng)技術(shù)[7-8]與傳統(tǒng)路燈結(jié)合起來(lái),采用ZigBee無(wú)線(xiàn)通信的控制方式讓路燈對(duì)行人具有預(yù)見(jiàn)性,與智能逐日系統(tǒng)相結(jié)合以實(shí)現(xiàn)最大化節(jié)能,從而更智能更便捷,無(wú)需大量人工管理且實(shí)時(shí)性智能化程度高。
1 系統(tǒng)組成及工作原理
校園路燈物聯(lián)網(wǎng)系統(tǒng)由CPU控制單元、模數(shù)轉(zhuǎn)換單元、ZigBee無(wú)線(xiàn)數(shù)據(jù)傳輸單元、驅(qū)動(dòng)單元和角度轉(zhuǎn)向機(jī)構(gòu)、傳感器等組成。其中,光敏傳感器對(duì)光線(xiàn)亮度做出檢測(cè),CPU判斷決定是否允許亮燈,并結(jié)合光強(qiáng)傳感器決定是否允許驅(qū)動(dòng)單元輸出。允許亮燈時(shí)人體感應(yīng)傳感器對(duì)是否有行人做出檢測(cè),檢測(cè)到行人立即點(diǎn)亮路燈并通過(guò)無(wú)線(xiàn)網(wǎng)絡(luò)發(fā)出數(shù)據(jù)。未檢測(cè)到行人但接收到有效數(shù)據(jù)的其它系統(tǒng)點(diǎn)亮路燈并繼續(xù)傳遞數(shù)據(jù),當(dāng)前數(shù)據(jù)也允許被人體感應(yīng)傳感器的最新檢測(cè)進(jìn)行刷新。光強(qiáng)傳感器將太陽(yáng)光強(qiáng)度轉(zhuǎn)換成傳感器可以識(shí)別的電壓信號(hào),模數(shù)轉(zhuǎn)換單元將模擬電壓信號(hào)轉(zhuǎn)化成數(shù)字信號(hào)傳遞給CPU單元,經(jīng)運(yùn)算處理,將控制信號(hào)發(fā)送給驅(qū)動(dòng)單元,使太陽(yáng)能發(fā)電板在小誤差范圍內(nèi)保持正對(duì)太陽(yáng),保證了最大的光能利用率。系統(tǒng)的組成及連接關(guān)系如圖1所示。

圖1 校園路燈物聯(lián)網(wǎng)系統(tǒng)結(jié)構(gòu)Fig.1 Campus light IOT system structure
2 系統(tǒng)的硬件設(shè)計(jì)
2.1 CPU控制單元
處理器為PQFP封裝的STC89C51RC單片機(jī)[9]。該型號(hào)單片機(jī)體積小而資源豐富,設(shè)計(jì)電路板時(shí)便于元器件排布緊湊,有效減小PCB板面積便于安裝,整體效果也更加美觀(guān)。最小系統(tǒng)電路如圖2所示。
2.2 模數(shù)轉(zhuǎn)換單元
模數(shù)轉(zhuǎn)換單元采用ADC0808芯片,以NE555振蕩電路為其提供約500 kHz的工作脈沖。太陽(yáng)能發(fā)電板未正對(duì)太陽(yáng)時(shí),左右兩個(gè)光強(qiáng)傳感器所接收的太陽(yáng)光強(qiáng)度不同,將各自的光強(qiáng)轉(zhuǎn)換成電壓信號(hào),ADC0808的兩路轉(zhuǎn)換通道將對(duì)應(yīng)的模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),傳遞給CPU單元,從而實(shí)現(xiàn)具備一定魯棒性的實(shí)時(shí)對(duì)正功能。脈沖發(fā)生電路和模數(shù)轉(zhuǎn)換電路如圖3、圖4所示。

圖2 最小系統(tǒng)原理Fig.2 Minimum system schematic

圖3 NE555脈沖發(fā)生電路Fig.3 NE555 pulse generation circuit

圖4 模數(shù)轉(zhuǎn)換電路Fig.4 Analog-digital conversion circuit
2.3 電機(jī)驅(qū)動(dòng)單元
電機(jī)驅(qū)動(dòng)單元選用L298N作為主要的功率驅(qū)動(dòng)芯片。該芯片內(nèi)部有4個(gè)通道的邏輯驅(qū)動(dòng)電路,集成有專(zhuān)用的H橋驅(qū)動(dòng),具有兩個(gè)使能端控制信號(hào),通過(guò)調(diào)節(jié)PWM波還可以調(diào)節(jié)電機(jī)的轉(zhuǎn)動(dòng)速度。該驅(qū)動(dòng)電路如圖5所示。

圖5 L298N驅(qū)動(dòng)電路Fig.5 L298N drive circuit
系統(tǒng)設(shè)計(jì)時(shí)未考慮PWM波調(diào)速,ENA、ENB兩個(gè)使能端直接連接VCC。為了防止自感電壓擊穿開(kāi)關(guān)元件并且較好地釋放其自感能量,在輸出端設(shè)計(jì)了續(xù)流保護(hù)二極管。當(dāng)電機(jī)長(zhǎng)時(shí)間工作時(shí),芯片明顯發(fā)熱,安裝一塊鋁制散熱片以加強(qiáng)散熱效果。
2.4 傳感器的選型和使用
根據(jù)實(shí)際需求,選定傳感器的類(lèi)型及型號(hào)。本系統(tǒng)選用了3種傳感器:光敏電阻、熱釋電人體紅外線(xiàn)傳感器、光強(qiáng)傳感器[10]。
其中光強(qiáng)傳感器本質(zhì)上是一種微型太陽(yáng)能電池板,將光線(xiàn)強(qiáng)度轉(zhuǎn)換為電壓值,最大輸出電壓約為5.1 V。選用兩片光強(qiáng)傳感器用支架調(diào)整出一定角度后安裝在太陽(yáng)能電池板上,當(dāng)太陽(yáng)對(duì)地角度發(fā)生改變,兩片光強(qiáng)傳感器間產(chǎn)生壓差,經(jīng)CPU計(jì)算比較輸出轉(zhuǎn)向信號(hào),轉(zhuǎn)向機(jī)構(gòu)動(dòng)作一定角度正對(duì)太陽(yáng)。如圖6所示為手工制作的機(jī)械支架和光強(qiáng)傳感器。

圖6 光強(qiáng)傳感器Fig.6 Light intensity sensor
光照強(qiáng)度增加到一定程度時(shí),該傳感器即輸出最大電壓導(dǎo)致較難判斷太陽(yáng)角度,故應(yīng)改進(jìn)設(shè)計(jì)分壓電路,將電壓轉(zhuǎn)換為電流,采集與光強(qiáng)保持更好對(duì)應(yīng)關(guān)系的電流信號(hào)。
2.5 人體感應(yīng)單元
人體感應(yīng)單元在行人經(jīng)過(guò)時(shí)發(fā)出信號(hào),由CPU控制啟動(dòng)路燈,通過(guò)無(wú)線(xiàn)方式通知周?chē)舾陕窡簦蛊渌窡籼崆包c(diǎn)亮,從而高效節(jié)能且智能。人體感應(yīng)電路如圖7所示。

圖7 人體感應(yīng)電路Fig.7 Human sensing circuit
人體感應(yīng)單元設(shè)置為允許觸發(fā)和可重復(fù)觸發(fā)方式。該電路主要涉及輸出延遲時(shí)間和觸發(fā)封鎖時(shí)間。其中BISS0001芯片的引腳3(RR1)和引腳 4(RC1)是輸出延遲時(shí)間Tx的調(diào)節(jié)端,Tx≈49152R1C1(R1是接在引腳3(RR1)的電阻;C1是接在引腳4(RC1)上的電容),引腳 5(RC2)和引腳 6(RR2)是觸發(fā)封鎖時(shí)間Ti的調(diào)節(jié)端,Ti≈24R2C2(R2是接在引腳 6(RR2)的電阻;C2是接在引腳 5(RC2)上的電容)。該電路需具有實(shí)時(shí)檢測(cè)的功能,輸出延遲時(shí)間Tx和觸發(fā)封鎖時(shí)間Ti均設(shè)為0,電路中C1和C2均直接短接。
2.6 無(wú)線(xiàn)數(shù)據(jù)傳輸單元
ZigBee無(wú)線(xiàn)模塊具有安全穩(wěn)定、功耗低、成本低、時(shí)延短、工作頻段靈活等優(yōu)點(diǎn)。設(shè)置其端口P0.2、P0.3 為外設(shè)功能,成為接收(Rx)和發(fā)送(Tx)端口,串口通信的波特率配置為4800,使與CPU工作頻率相同。通過(guò)對(duì)其編程,可使其以無(wú)線(xiàn)形式發(fā)送CPU的數(shù)據(jù),由其它路燈系統(tǒng)的無(wú)線(xiàn)接收端接收。
3 系統(tǒng)的軟件設(shè)計(jì)
3.1 系統(tǒng)主要程序設(shè)計(jì)
系統(tǒng)上電啟動(dòng)后,立即對(duì)定時(shí)器、模數(shù)轉(zhuǎn)換單元、外部中斷進(jìn)行初始化。初始化完成后,定時(shí)器發(fā)出脈沖,ADC0808接收到CPU的使能信號(hào)后,開(kāi)始檢測(cè)光強(qiáng)傳感器信號(hào)。外部中斷函數(shù)不斷地檢測(cè)外部輸入信號(hào),如果接收到信號(hào),立即對(duì)信號(hào)進(jìn)行處理,然后判段執(zhí)行對(duì)應(yīng)的程序。系統(tǒng)主程序流程如圖8所示。

圖8 系統(tǒng)主程序流程Fig.8 System main program flow chart
3.2 模數(shù)轉(zhuǎn)換服務(wù)子程序
該子程序的主要功能是感知太陽(yáng)光線(xiàn)角度,為了節(jié)約耗電并提高系統(tǒng)的運(yùn)行效率,采用詢(xún)問(wèn)應(yīng)答的方式進(jìn)行處理,詳細(xì)流程如圖9所示。
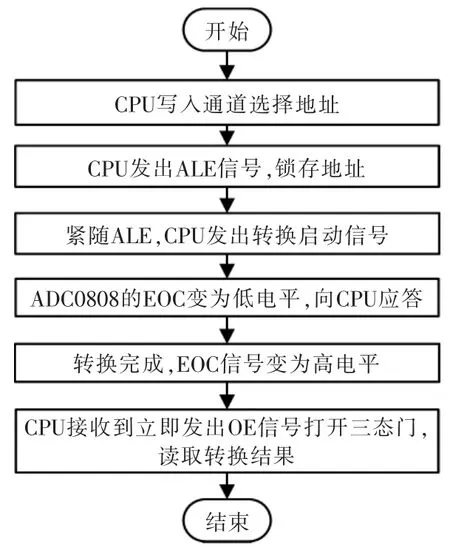
圖9 模數(shù)轉(zhuǎn)換處理流程Fig.9 A/D conversion flow chart
4 系統(tǒng)調(diào)試與運(yùn)行驗(yàn)證
系統(tǒng)框架初步設(shè)計(jì)完成后,首先在Proteus軟件中進(jìn)行該物聯(lián)網(wǎng)系統(tǒng)核心電路的仿真,經(jīng)過(guò)電路搭建,程序下載,系統(tǒng)仿真實(shí)驗(yàn)的信號(hào)傳遞和動(dòng)作指示反應(yīng)都在預(yù)期范圍內(nèi)。
系統(tǒng)的實(shí)際調(diào)試工作較為瑣碎,主要就電源部分簡(jiǎn)要論述。電源分控制、驅(qū)動(dòng)電源兩部分。采用7805CT(NLHC249),輸入電壓UI=6.8 V,輸出Uo=5 V,加散熱片后可使Imax=1 A。經(jīng)AMS1117-3.3芯片(Sot-223封裝)輸出3.3 V電源,供ZigBee模塊使用。因焊接不牢、線(xiàn)徑偏細(xì)等問(wèn)題,電源調(diào)試時(shí)常出現(xiàn)線(xiàn)路糊化等問(wèn)題,分別做出改進(jìn)。經(jīng)過(guò)實(shí)際測(cè)試,該電路的輸出功率可以滿(mǎn)足系統(tǒng)需要。圖10為系統(tǒng)供電電源電路,圖11為實(shí)際焊接的接口電路。

圖10 系統(tǒng)供電電源電路Fig.10 System power supply circuit

圖11 接口電路Fig.11 Interface circuit
在程序和外圍設(shè)備設(shè)計(jì)完成后,將硬件和軟件進(jìn)行整合,開(kāi)始測(cè)試系統(tǒng)的各項(xiàng)功能,通過(guò)不斷地測(cè)試與調(diào)試逐漸完善系統(tǒng)的穩(wěn)定性,最終實(shí)現(xiàn)了系統(tǒng)的全部預(yù)期功能。圖12為搭建的實(shí)物平臺(tái)。

圖12 校園路燈物聯(lián)網(wǎng)系統(tǒng)Fig.12 Campus lights IOT system
5 結(jié)語(yǔ)
本文所設(shè)計(jì)的校園路燈物聯(lián)網(wǎng)系統(tǒng)運(yùn)用Zig-Bee無(wú)線(xiàn)通訊模塊進(jìn)行局域自組網(wǎng),采用C語(yǔ)言對(duì)所設(shè)計(jì)電路進(jìn)行開(kāi)發(fā),在組建過(guò)程中設(shè)計(jì)多種專(zhuān)用外部執(zhí)行機(jī)構(gòu),在實(shí)驗(yàn)仿真和實(shí)際應(yīng)用時(shí)表現(xiàn)出穩(wěn)定性強(qiáng)、操作安裝便捷等特點(diǎn)。在系統(tǒng)的整體設(shè)計(jì)中采用功能模塊化的思路,便于實(shí)際應(yīng)用中的使用和維護(hù)。經(jīng)過(guò)實(shí)物平臺(tái)的功能驗(yàn)證,該系統(tǒng)滿(mǎn)足預(yù)期設(shè)計(jì)目標(biāo)和應(yīng)用環(huán)境的要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16

- 自動(dòng)化與儀表的其它文章
- 三維數(shù)據(jù)模型的逆向設(shè)計(jì)及實(shí)現(xiàn)方法
- 基于嵌入式的智能車(chē)載多媒體控制終端設(shè)計(jì)與實(shí)現(xiàn)
- 基于植保無(wú)人機(jī)的電池續(xù)航供電系統(tǒng)設(shè)計(jì)
- 基于改進(jìn)混合蛙跳的移動(dòng)傳感網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)優(yōu)化研究
- 基于物聯(lián)網(wǎng)技術(shù)的幼兒園兒童監(jiān)管系統(tǒng)設(shè)計(jì)
- 基于擴(kuò)展卡爾曼的鋰離子電池SOC估算研究