風(fēng)力機(jī)智能葉片氣彈建模與主動(dòng)控制仿真研究
2018-08-29 02:21:10張文廣劉瑞杰王奕楓
動(dòng)力工程學(xué)報(bào) 2018年8期
關(guān)鍵詞:模型
張文廣, 劉瑞杰, 王奕楓
(1.華北電力大學(xué) 新能源電力系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 102206; 2.華北電力大學(xué) 工業(yè)過(guò)程測(cè)控新技術(shù)與系統(tǒng)北京市重點(diǎn)實(shí)驗(yàn)室,北京 102206)
近年來(lái),隨著全球風(fēng)電的快速發(fā)展,為降低發(fā)電成本,風(fēng)力機(jī)的額定功率越來(lái)越大,葉片長(zhǎng)度也隨之增加,其結(jié)構(gòu)更具柔性。葉片作為風(fēng)力機(jī)的主要承載部件,增大葉片尺寸會(huì)使其處于更為復(fù)雜的氣動(dòng)環(huán)境,導(dǎo)致葉片形變更為劇烈,其受到的疲勞載荷和極限載荷也不斷增大。這對(duì)大型風(fēng)力機(jī)葉片的設(shè)計(jì)和控制提出越來(lái)越高的要求。變槳控制作為目前風(fēng)力機(jī)唯一的主動(dòng)控制方法,由于調(diào)節(jié)速度較慢等問(wèn)題難以滿足風(fēng)力機(jī)大型化的需求。近年來(lái)興起的智能葉片技術(shù),包括尾緣襟翼技術(shù)、微插片技術(shù)和主動(dòng)扭轉(zhuǎn)技術(shù)等可有效地克服這些難題[1]。其中,尾緣襟翼技術(shù)可通過(guò)改變?nèi)~片翼型形狀來(lái)改變?nèi)~片的氣動(dòng)特性,進(jìn)而減小葉片劇烈形變和所受疲勞載荷[2]。目前,國(guó)內(nèi)外對(duì)智能葉片的研究主要在理論和實(shí)驗(yàn)研究階段[1-2]。為進(jìn)一步研究尾緣襟翼對(duì)智能葉片葉尖偏移量及降載控制的作用,有必要對(duì)帶有尾緣襟翼的智能葉片進(jìn)行氣彈建模與控制。
Staino等[3]建立了不考慮重力和慣性載荷的擺振方向氣彈模型,并研究了線性二次型(LQ)控制對(duì)擺振方向葉尖偏移量及頻譜的影響。Castaignet等[4]建立了不考慮重力影響的揮舞方向的氣彈模型,并研究了尾緣襟翼對(duì)揮舞方向葉根彎矩的影響。Ju等[5]建立了不考慮耗散能的揮舞方向氣彈模型,并研究了輸入整形控制對(duì)揮舞方向葉尖偏移量的影響。Chen等[6]建立了風(fēng)力機(jī)葉片擺振方向的彈性模型,并采用模糊控制通過(guò)阻尼器對(duì)葉片的擺振方向偏移量和基層剪力進(jìn)行了控制。劉翀等[7]建立了葉片氣動(dòng)模型,研究了槳距控制對(duì)風(fēng)力機(jī)氣動(dòng)性能的影響。徐燕等[8]建立了不考慮重力作用的葉片揮舞氣彈模型,并研究了基于極點(diǎn)配置的比例積分微分(PID)控制對(duì)葉片揮舞方向位移的控制作用。上述研究均建立了風(fēng)力機(jī)葉片的氣彈模型,并對(duì)其進(jìn)行了相應(yīng)控制,但所建模型不能有效模擬風(fēng)力機(jī)大型化引起的復(fù)雜氣彈特性,控制性能也有待提高。
筆者以帶有尾緣襟翼的美國(guó)可再生能源實(shí)驗(yàn)室(NREL)5 MW參考風(fēng)力機(jī)為研究對(duì)象,綜合考慮了大型風(fēng)力機(jī)葉片的旋轉(zhuǎn)、重力、阻尼和氣彈耦合等因素,建立了較為全面的智能葉片揮舞氣彈模型(以下簡(jiǎn)稱(chēng)氣彈模型),并與FAST氣彈仿真平臺(tái)(以下簡(jiǎn)稱(chēng)FAST平臺(tái))進(jìn)行了對(duì)比仿真,以驗(yàn)證所建模型的準(zhǔn)確性。在上述模型的基礎(chǔ)上,提出了基于最小均方(LMS)主動(dòng)控制算法(以下簡(jiǎn)稱(chēng)LMS算法)的尾緣襟翼主動(dòng)控制方法,對(duì)湍流風(fēng)況下的葉尖偏移量進(jìn)行控制。
1 建模對(duì)象
研究對(duì)象為NREL 5 MW參考風(fēng)力機(jī),在葉片上添加了獨(dú)立的尾緣襟翼執(zhí)行機(jī)構(gòu),建立了帶有尾緣襟翼的氣彈模型。
1.1 NREL 5 MW參考風(fēng)力機(jī)
NREL 5 MW參考風(fēng)力機(jī)有3個(gè)葉片,屬于迎風(fēng)式變速變槳風(fēng)力機(jī),其葉片由8種不同的翼型組成。NREL 5 MW參考風(fēng)力機(jī)的主要參數(shù)見(jiàn)表1[9]。

表1 NREL 5 MW參考風(fēng)力機(jī)參數(shù)
1.2 尾緣襟翼執(zhí)行機(jī)構(gòu)
NREL 5 MW參考風(fēng)力機(jī)葉片總長(zhǎng)為61.5 m。將葉片分為30個(gè)葉素段,并參考文獻(xiàn)[10]中的最優(yōu)尾緣襟翼參數(shù),在葉片第23~29葉素段上增加尾緣襟翼,帶有尾緣襟翼的葉片結(jié)構(gòu)如圖1所示。尾緣襟翼執(zhí)行器動(dòng)作存在延遲,導(dǎo)致其對(duì)尾緣襟翼的控制存在滯后。將尾緣襟翼執(zhí)行機(jī)構(gòu)視為一階慣性環(huán)節(jié)。

圖1 風(fēng)力機(jī)葉片及尾緣襟翼示意圖
1.3 風(fēng)力機(jī)坐標(biāo)系
為準(zhǔn)確描述風(fēng)力機(jī)葉片在旋轉(zhuǎn)時(shí)的運(yùn)動(dòng)狀態(tài),以旋轉(zhuǎn)葉片為參考系,建立了運(yùn)動(dòng)坐標(biāo)系,如圖2所示。選取沿葉片展向向外的方向?yàn)閤軸正方向,y軸為葉片旋轉(zhuǎn)的切線方向,z軸為垂直于葉輪平面的方向,使該坐標(biāo)軸符合右手定則。
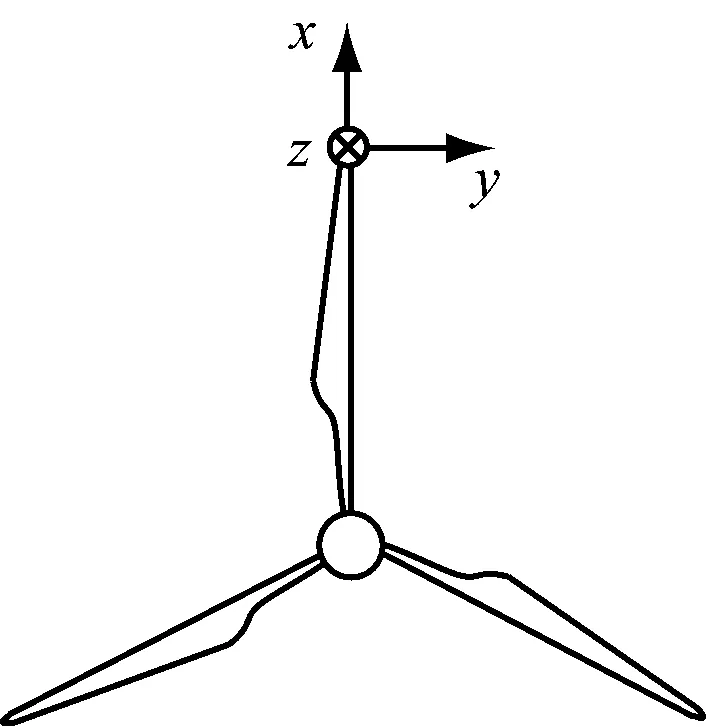
圖2 風(fēng)力機(jī)葉片坐標(biāo)系示意圖
2 智能葉片氣彈建模
尾緣襟翼主要影響揮舞方向氣動(dòng)載荷,因此主要建立氣彈模型,由氣動(dòng)模型、彈性模型和氣彈耦合計(jì)算方法這3部分組成。
2.1 氣動(dòng)模型
2.1.1 葉素動(dòng)量理論
葉素動(dòng)量理論是較為成熟的氣動(dòng)模型分析方法[11],分為葉素理論和動(dòng)量理論。在葉素理論中將葉片沿展向分為許多葉素,假設(shè)每個(gè)葉素上的空氣動(dòng)力學(xué)特性相互獨(dú)立。動(dòng)量理論是將包含風(fēng)力機(jī)的環(huán)形控制體離散為多個(gè)環(huán)形單元控制體,假設(shè)控制體內(nèi)流體不可壓縮且相互獨(dú)立[12]。根據(jù)葉素動(dòng)量理論可以計(jì)算在不同風(fēng)速、轉(zhuǎn)速和槳距角下葉片所受穩(wěn)態(tài)載荷和推力的變化。
根據(jù)葉素動(dòng)量理論,在已知葉素升力系數(shù)Cl和阻力系數(shù)Cd的條件下,可以通過(guò)局部槳距角求得該段葉素的法向力系數(shù)Cn和切向力系數(shù)Ct:
(1)
式中:φ為該段葉素的入流角,φ=α+β,其中α為葉片攻角,β為局部槳距角。
通過(guò)葉素的法向力系數(shù)Cn和切向力系數(shù)Ct可求得該段葉素的局部揮舞方向載荷pN和擺振方向載荷pT:
(2)

2.1.2 尾緣襟翼對(duì)氣動(dòng)模型的影響
帶有尾緣襟翼的翼型升力系數(shù)Cl和阻力系數(shù)Cd隨葉片攻角α以及襟翼角γ的變化而改變。設(shè)尾緣襟翼偏向z軸正方向時(shí)襟翼角為正,反之為負(fù)。
在NACA64_A17翼型的基礎(chǔ)上,得到不同襟翼角γ下的升力系數(shù)Cl和阻力系數(shù)Cd。通過(guò)Xfoil[13]的分析計(jì)算,得到不同襟翼角γ下升力系數(shù)Cl和阻力系數(shù)Cd隨攻角α變化的數(shù)據(jù)表,從而得到Cl(α,γ)和Cd(α,γ)的二維數(shù)據(jù)表,可以通過(guò)線性插值法查表得到指定攻角α和襟翼角γ下的Cl(α,γ)和Cd(α,γ)。
2.2 彈性模型
葉片彈性建模方法主要有模態(tài)法、多體動(dòng)力學(xué)方法和有限元法等,其中模態(tài)法由于精度較高、運(yùn)行速度較快而被廣泛應(yīng)用于風(fēng)力機(jī)葉片氣彈模型的研究中。筆者基于模態(tài)法,綜合考慮了大型風(fēng)力機(jī)葉片的旋轉(zhuǎn)、重力、阻尼和氣彈耦合等因素,建立了較為全面的氣彈模型。
2.2.1 模態(tài)法
在模態(tài)參數(shù)模型中,以模態(tài)頻率、模態(tài)向量(振型)和衰減系數(shù)為特征參數(shù)的數(shù)學(xué)模型可完整描述一個(gè)振動(dòng)系統(tǒng)。模態(tài)法是指以振動(dòng)理論為基礎(chǔ),以模態(tài)參數(shù)為目標(biāo)的分析方法[14]。
風(fēng)力機(jī)葉片的振動(dòng)與其自身的結(jié)構(gòu)屬性、邊界條件以及外界風(fēng)速、所受重力和發(fā)電機(jī)轉(zhuǎn)矩等外來(lái)激勵(lì)有關(guān)。為了分析較為復(fù)雜的振動(dòng),通常將其分解為幾個(gè)與外來(lái)激勵(lì)無(wú)關(guān)的簡(jiǎn)單振動(dòng)組合,這些簡(jiǎn)單振動(dòng)就是振型。振型函數(shù)是通過(guò)分析計(jì)算葉片的結(jié)構(gòu)數(shù)據(jù)特征而得出的一個(gè)近似函數(shù),用于表示振動(dòng)形狀。為了精確描述智能葉片運(yùn)動(dòng),使用N階廣義坐標(biāo)系描述葉片振動(dòng)系統(tǒng)。將q(t)定義為系統(tǒng)的廣義坐標(biāo)向量:
(3)
式中:qi(t)為葉片第i個(gè)揮舞振動(dòng)振型對(duì)應(yīng)的廣義坐標(biāo),其中i=1,2,…,N。
根據(jù)廣義坐標(biāo)向量與振型可以得出在t時(shí)刻x點(diǎn)處的葉尖揮舞方向偏移量u(x,t):
(4)
式中:φi(x)為第i階揮舞方向的本征模態(tài)振型函數(shù)。
根據(jù)廣義坐標(biāo)向量與相應(yīng)模態(tài)γi(x)來(lái)描述尾緣襟翼的襟翼角γ:
(5)
2.2.2 葉片揮舞方向的動(dòng)能
葉片因旋轉(zhuǎn)而受力形變的過(guò)程中,旋轉(zhuǎn)產(chǎn)生的速度僅影響葉片擺振方向的動(dòng)能。則t時(shí)刻x點(diǎn)處葉片揮舞方向的偏移速度為v(x,t):
(6)
葉片揮舞方向的動(dòng)能Tb為:
(7)

2.2.3 葉片揮舞方向的勢(shì)能
葉片在受外力的運(yùn)動(dòng)過(guò)程中,外力所做的功一部分轉(zhuǎn)化為儲(chǔ)存在葉片內(nèi)的勢(shì)能。葉片儲(chǔ)存的總勢(shì)能由彎曲應(yīng)變能、離心力勢(shì)能以及重力勢(shì)能組成。
(1)葉片受到外力作用產(chǎn)生揮舞方向的形變,因此一部分外力做的功轉(zhuǎn)化為葉片彎曲產(chǎn)生的彎曲應(yīng)變能。根據(jù)葉片揮舞方向的彎曲形狀和彎曲剛度,葉片揮舞方向的應(yīng)變?chǔ)艦椋?/p>
(8)
式中:z為該段葉片與形心坐標(biāo)軸的距離。
葉片揮舞方向的應(yīng)力為σ=Eε,其中E為葉片的彈性模量。葉片揮舞方向的彎曲應(yīng)變能Vε為:
(9)

(2)葉片受離心力作用產(chǎn)生軸向形變,離心力使葉片在軸線方向產(chǎn)生離心力勢(shì)能。離心力Fr(x)為:

(10)
葉片的軸向形變量s為:
(11)
式中:L為該段葉片形變后的長(zhǎng)度。
葉片離心力勢(shì)能Vr為:
(12)
(3)葉片受重力作用也會(huì)產(chǎn)生形變,重力使得葉片在軸線方向產(chǎn)生重力勢(shì)能。重力的軸向分力G(x)為:
(13)
式中:g為當(dāng)?shù)刂亓铀俣取?/p>
葉片的重力勢(shì)能Vg為:
(14)
綜上,葉片揮舞方向總勢(shì)能V為:
V=Vε+Vr+Vg
(15)
2.2.4 葉片揮舞方向的耗散能
在振動(dòng)過(guò)程中,葉片受結(jié)構(gòu)阻尼作用產(chǎn)生耗散能,其振動(dòng)幅度呈衰減趨勢(shì)。葉片所受的阻尼力FR(x)為:
(16)
式中:ci(x)為阻尼系數(shù),ci(x)=2ζωim(x),其中ζ為葉片結(jié)構(gòu)阻尼比,ωi為葉片第i階揮舞方向本征模態(tài)振型函數(shù)對(duì)應(yīng)的固有頻率。
耗散能D為:
(17)
2.2.5 葉片揮舞方向廣義載荷的虛功
葉片受外界載荷作用所做的總虛功由氣動(dòng)載荷、離心力載荷和重力載荷所做的虛功組成。
(1)葉片揮舞方向受到的氣動(dòng)載荷是葉片發(fā)生揮舞振動(dòng)的主要原因。根據(jù)虛位移原理[15]可以得到葉片揮舞方向氣動(dòng)載荷pN所做的虛功Wp:
(18)
(2)葉片受外力作用發(fā)生旋轉(zhuǎn)后會(huì)受到離心力的作用。當(dāng)考慮葉片形變時(shí),葉片揮舞方向?qū)⑹艿诫x心力分力的作用,使其揮舞偏移量減小。葉片每段葉素所受的離心力載荷pr(x)為:
(19)
葉片揮舞方向離心力載荷所做的虛功Wr為:
(20)
(3)與離心力類(lèi)似,葉片所受重力載荷也對(duì)揮舞方向的偏移量產(chǎn)生影響。葉片每段葉素所受的重力載荷pg(x)為:
(21)
葉片揮舞方向重力載荷所做的虛功Wg為:
(22)
綜上,葉片揮舞方向廣義載荷的總虛功Wb為:
Wb=Wp+Wr+Wg
(23)
2.2.6 尾緣襟翼對(duì)彈性模型的影響
尾緣襟翼主要影響智能葉片彈性模型葉片相應(yīng)位置的質(zhì)量和剛度分布,會(huì)改變?nèi)~片的總動(dòng)能和葉片所受的總虛功等。通常尾緣襟翼對(duì)葉片質(zhì)量分布以及葉片基線剛度的影響較小,一般可以忽略[16]。筆者主要研究尾緣襟翼運(yùn)動(dòng)過(guò)程中產(chǎn)生的動(dòng)能及其克服空氣動(dòng)力做功對(duì)智能葉片彈性模型的影響。
尾緣襟翼在受主動(dòng)控制力作用進(jìn)而改變襟翼角時(shí),襟翼繞主軸旋轉(zhuǎn)產(chǎn)生動(dòng)能,其揮舞方向的動(dòng)能TH為:
(24)
式中:lγ為尾緣襟翼的展向長(zhǎng)度;ρH為尾緣襟翼材料密度;cH為尾緣襟翼弦長(zhǎng),尾緣襟翼占弦比為25%,因此cH=c/4。
智能葉片揮舞方向的總動(dòng)能T為:
T=Tb+TH
(25)
尾緣襟翼受空氣動(dòng)力作用而產(chǎn)生繞尾緣襟翼主軸的力矩MH:
(26)
式中:CH(γ)為氣動(dòng)力鉸鏈力矩系數(shù)。
為克服空氣動(dòng)力作用并改變襟翼角,尾緣襟翼所做的虛功為:
(27)
智能葉片在揮舞方向的總虛功W為:
W=Wb+WH
(28)
2.3 氣彈耦合計(jì)算方法
由于大型風(fēng)力機(jī)的葉片柔性增強(qiáng),氣動(dòng)力、慣性力和彈性力等的耦合作用不可忽略,葉片所受氣動(dòng)載荷會(huì)使葉片產(chǎn)生形變,葉片的形變會(huì)進(jìn)一步改變?nèi)~片周?chē)鲌?chǎng),進(jìn)而使氣動(dòng)載荷產(chǎn)生變化。帶有尾緣襟翼的智能葉片隨著來(lái)流風(fēng)速和葉片氣彈情況發(fā)生變化,尾緣襟翼受主動(dòng)控制力作用,使得襟翼角發(fā)生改變,從而影響智能葉片的氣彈特性。因此,在帶有尾緣襟翼的智能葉片氣彈耦合過(guò)程中,襟翼角變化會(huì)引起翼型變化,進(jìn)而會(huì)與葉片氣動(dòng)模型以及彈性模型三者相互作用,最終達(dá)到動(dòng)態(tài)平衡。智能葉片的氣彈耦合計(jì)算方法的流程如圖3所示。
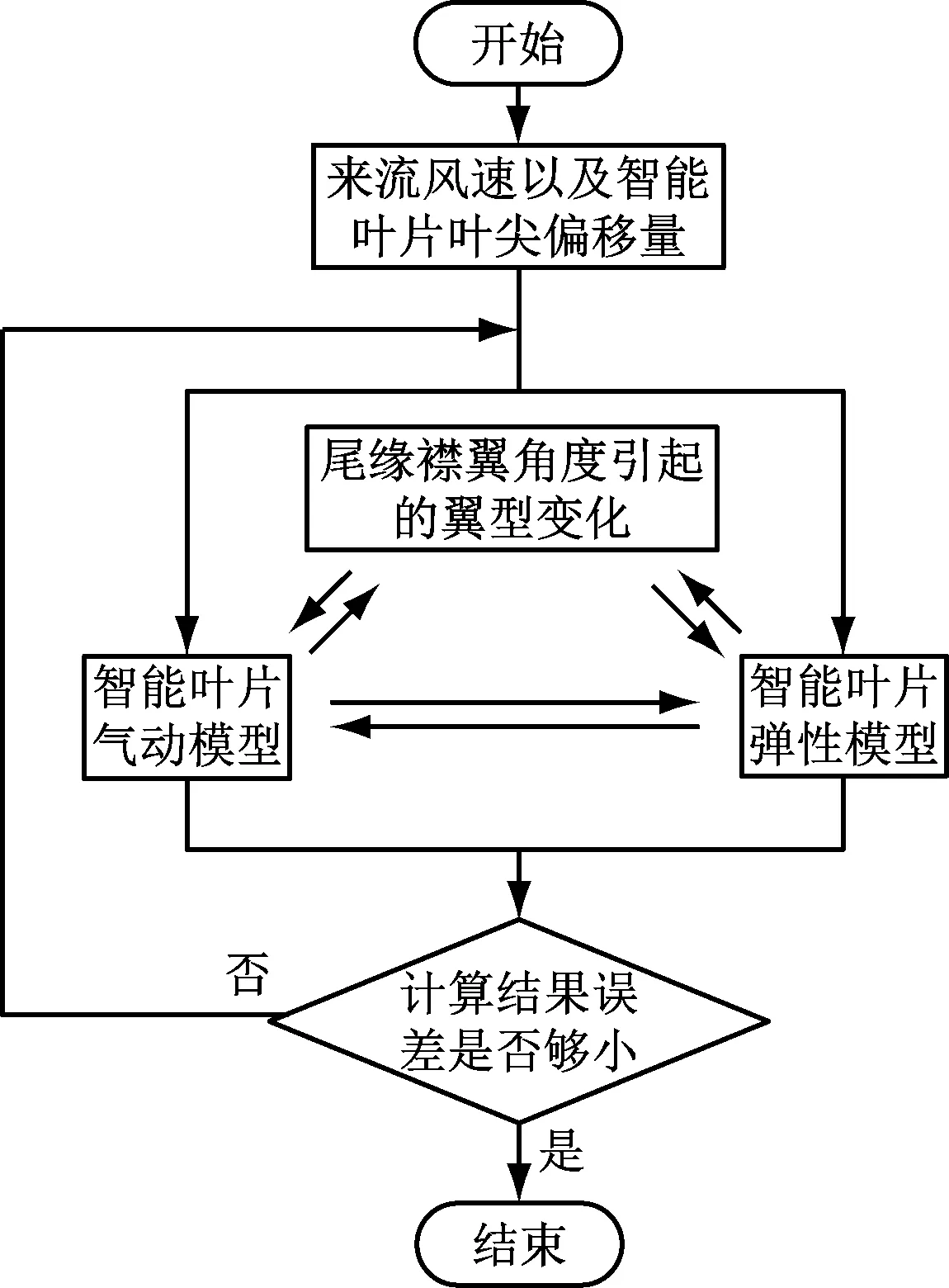
圖3 智能葉片氣彈耦合計(jì)算方法流程圖
2.4 智能葉片揮舞方向氣彈建模
根據(jù)拉格朗日方程,智能葉片揮舞方向的系統(tǒng)運(yùn)動(dòng)方程可由動(dòng)能T、勢(shì)能V、耗散能D以及所受廣義力Q表示:
(29)
Q=Qp+Qr+Qg+QH
式中:q為葉片廣義坐標(biāo);Qp為葉片揮舞方向氣動(dòng)廣義載荷;Qr為葉片揮舞方向離心力廣義載荷;Qg為葉片揮舞方向重力廣義載荷;QH為葉片尾緣襟翼控制力廣義載荷。
氣彈模型為:

(30)
其中,
K1,i=Kε,i-Ω2mi+
筆者使用模態(tài)法建立了氣彈模型。模態(tài)法使用的模態(tài)階次越高,氣彈模型越精確,但所需時(shí)間也越長(zhǎng)。葉片達(dá)到更高階模態(tài)所需的能量較多,難以被激勵(lì),因此氣彈模型選用前3階模態(tài)。
3 氣彈模型驗(yàn)證
FAST平臺(tái)[17]是由NREL開(kāi)發(fā)的風(fēng)力機(jī)氣彈仿真平臺(tái),其經(jīng)過(guò)GL認(rèn)證,計(jì)算結(jié)果準(zhǔn)確度較高。筆者在風(fēng)力機(jī)使用標(biāo)準(zhǔn)變速變槳控制的條件下,將建立的氣彈模型與帶有尾緣襟翼的FAST平臺(tái)[10]進(jìn)行了對(duì)比仿真驗(yàn)證。
3.1 多種風(fēng)況下氣彈模型準(zhǔn)確性驗(yàn)證
仿真時(shí)間為480 s,風(fēng)況為每隔60 s階躍增加的區(qū)域2穩(wěn)定風(fēng)況(輪轂高度風(fēng)速變化范圍為4~11 m/s)。圖4和圖5分別給出了氣彈模型與FAST平臺(tái)葉尖偏移量和葉根揮舞彎矩的變化情況。與FAST平臺(tái)相比,氣彈模型的葉尖偏移量偏差約為5.42%,葉根揮舞彎矩偏差約為5.33%。
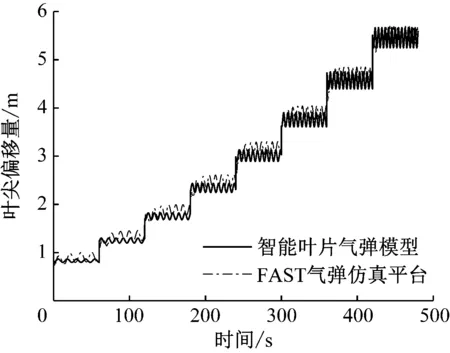
圖4 區(qū)域2穩(wěn)定風(fēng)況下的葉尖偏移量
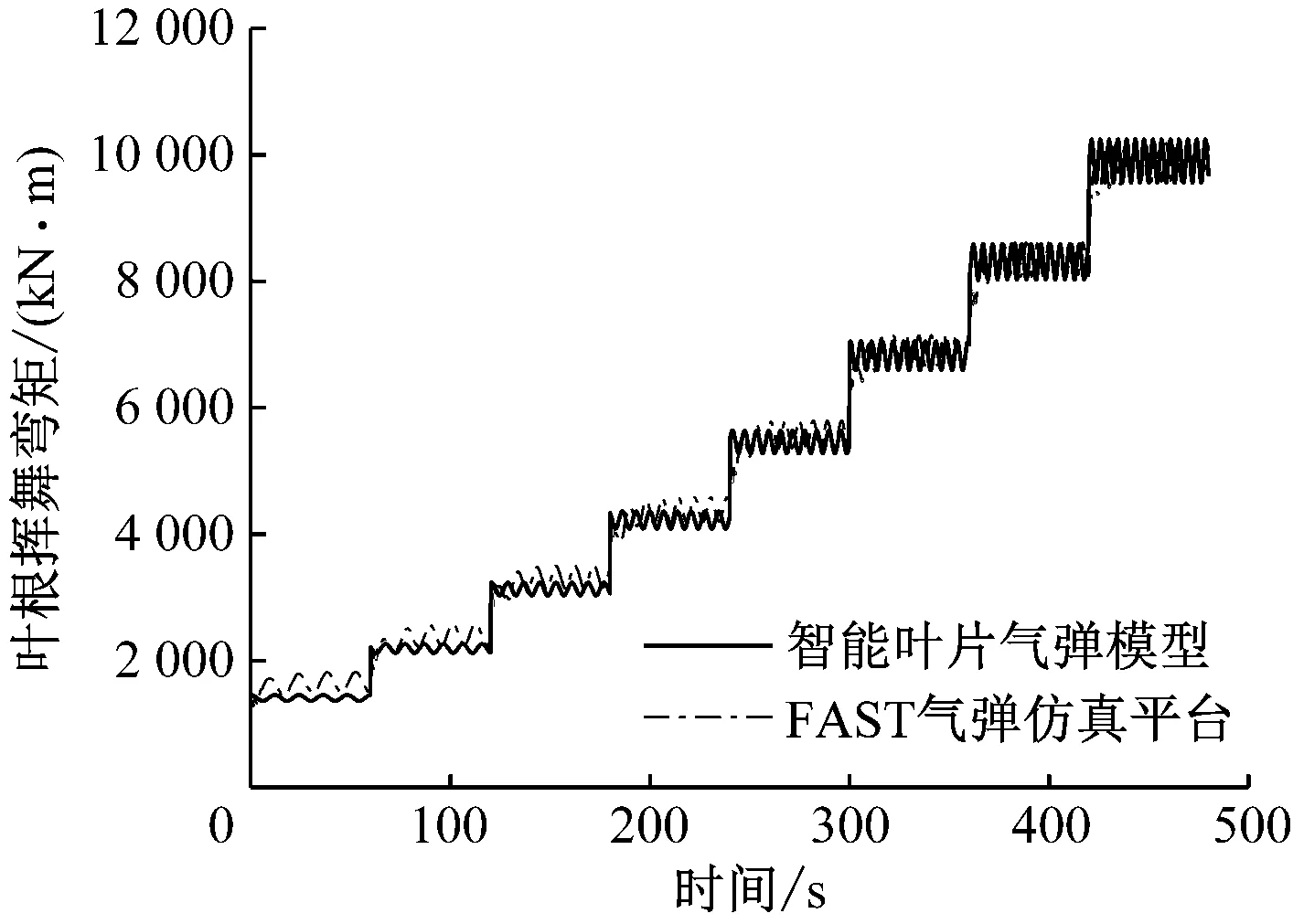
圖5 區(qū)域2穩(wěn)定風(fēng)況下的葉根揮舞彎矩
仿真時(shí)間為1 400 s,風(fēng)況為每隔100 s階躍增加的區(qū)域3穩(wěn)定風(fēng)況(輪轂高度風(fēng)速變化范圍為12~24 m/s)。圖6和圖7分別給出了氣彈模型與FAST平臺(tái)葉尖偏移量和葉根揮舞彎矩的變化情況。與FAST平臺(tái)相比,氣彈模型的葉尖偏移量偏差約為2%,葉根揮舞彎矩偏差約為6.4%。
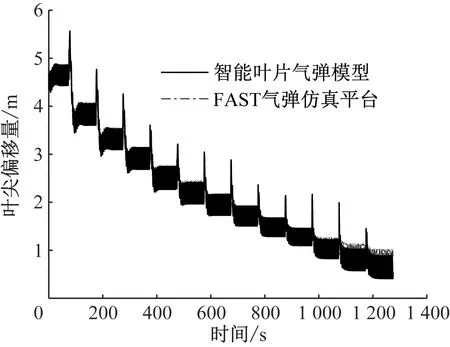
圖6 區(qū)域3穩(wěn)定風(fēng)況下的葉尖偏移量
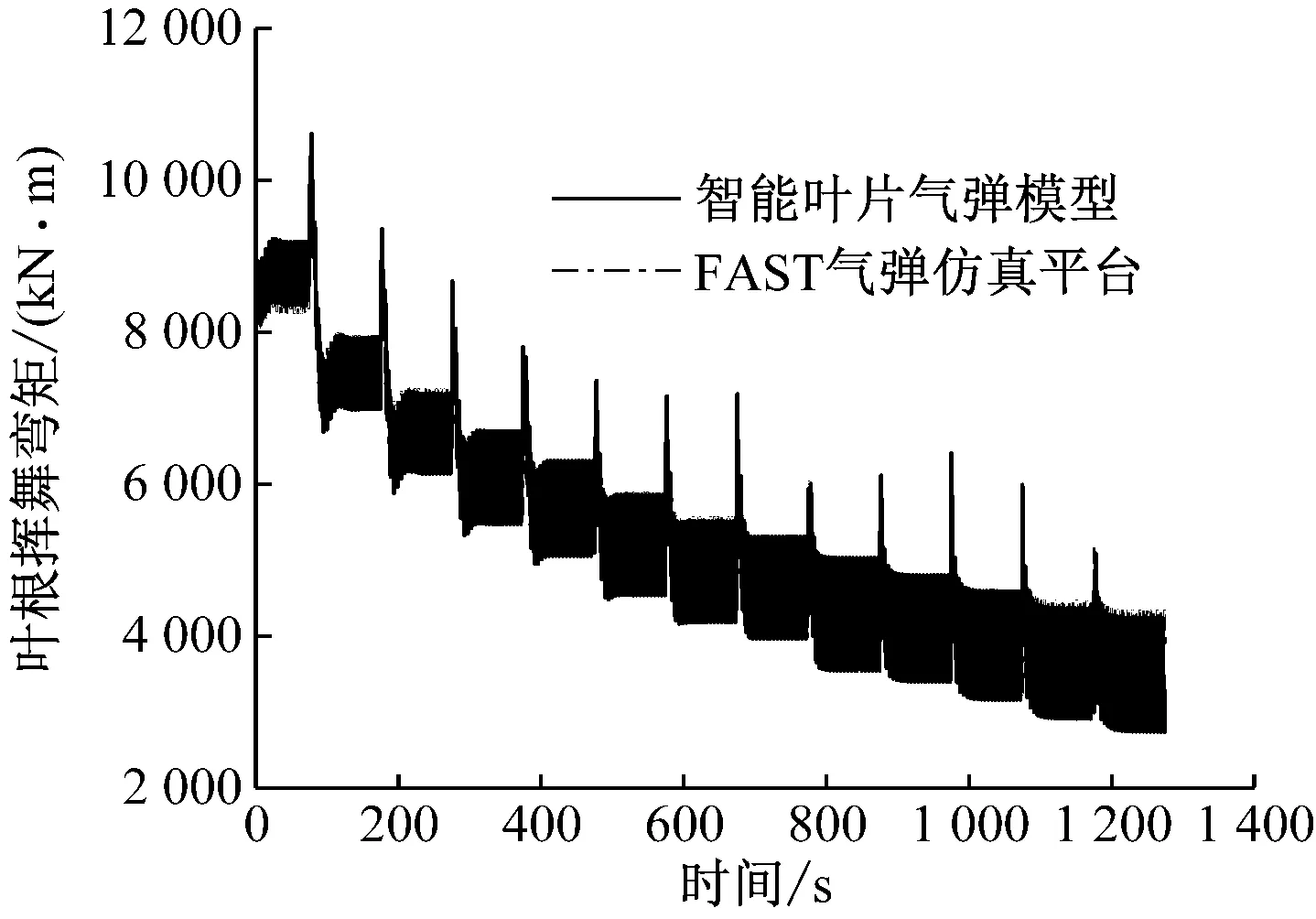
圖7 區(qū)域3穩(wěn)定風(fēng)況下的葉根揮舞彎矩
仿真時(shí)間為325 s,風(fēng)況為輪轂高度平均風(fēng)速為11.4 m/s、湍流強(qiáng)度為5%的標(biāo)準(zhǔn)湍流風(fēng)況。圖8和圖9分別給出了氣彈模型與FAST平臺(tái)葉尖偏移量和葉根揮舞彎矩的變化情況。與FAST平臺(tái)相比,氣彈模型的葉尖偏移量偏差約為4.31%,葉根揮舞彎矩偏差約為4.29%。
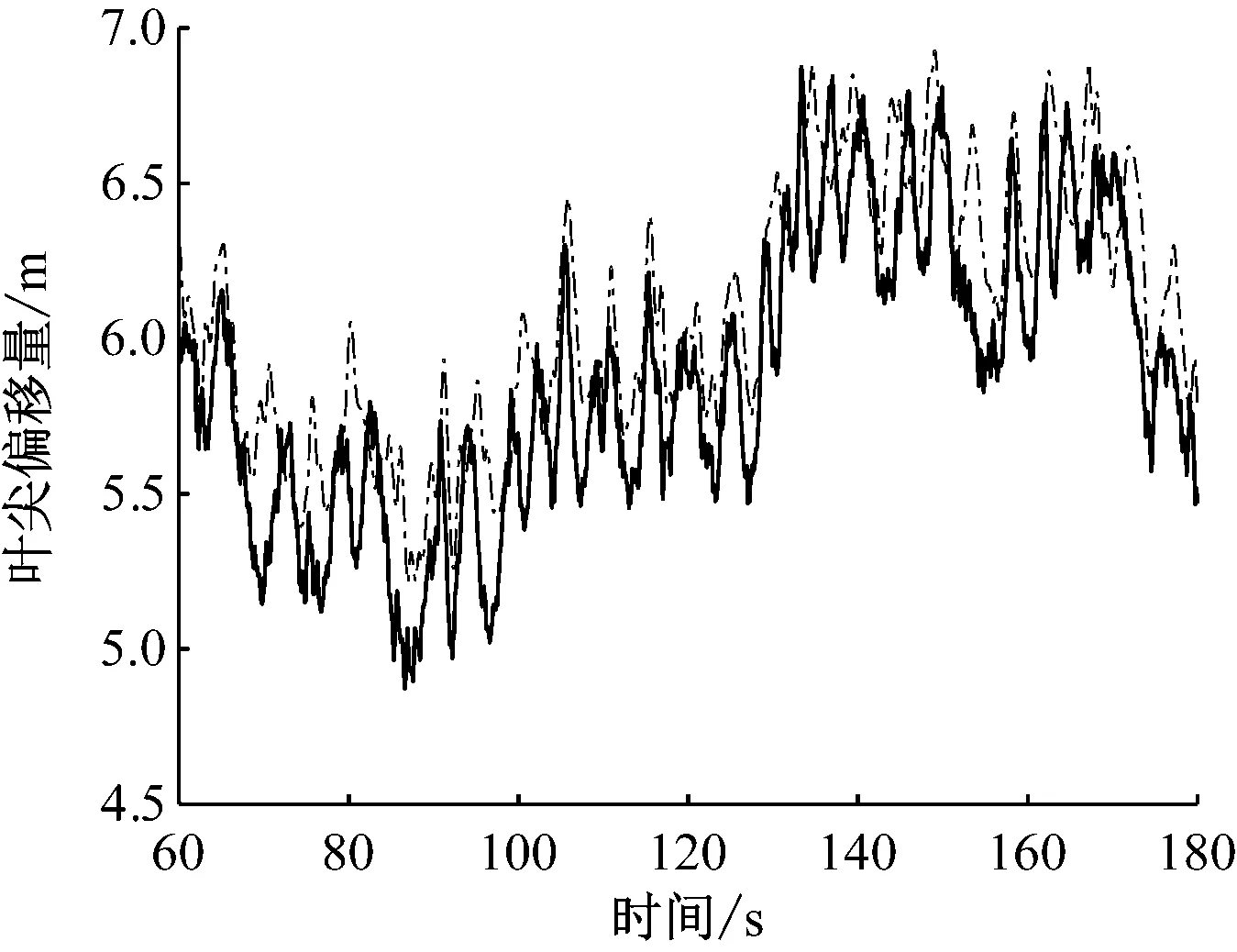
圖8 標(biāo)準(zhǔn)湍流風(fēng)況下的葉尖偏移量
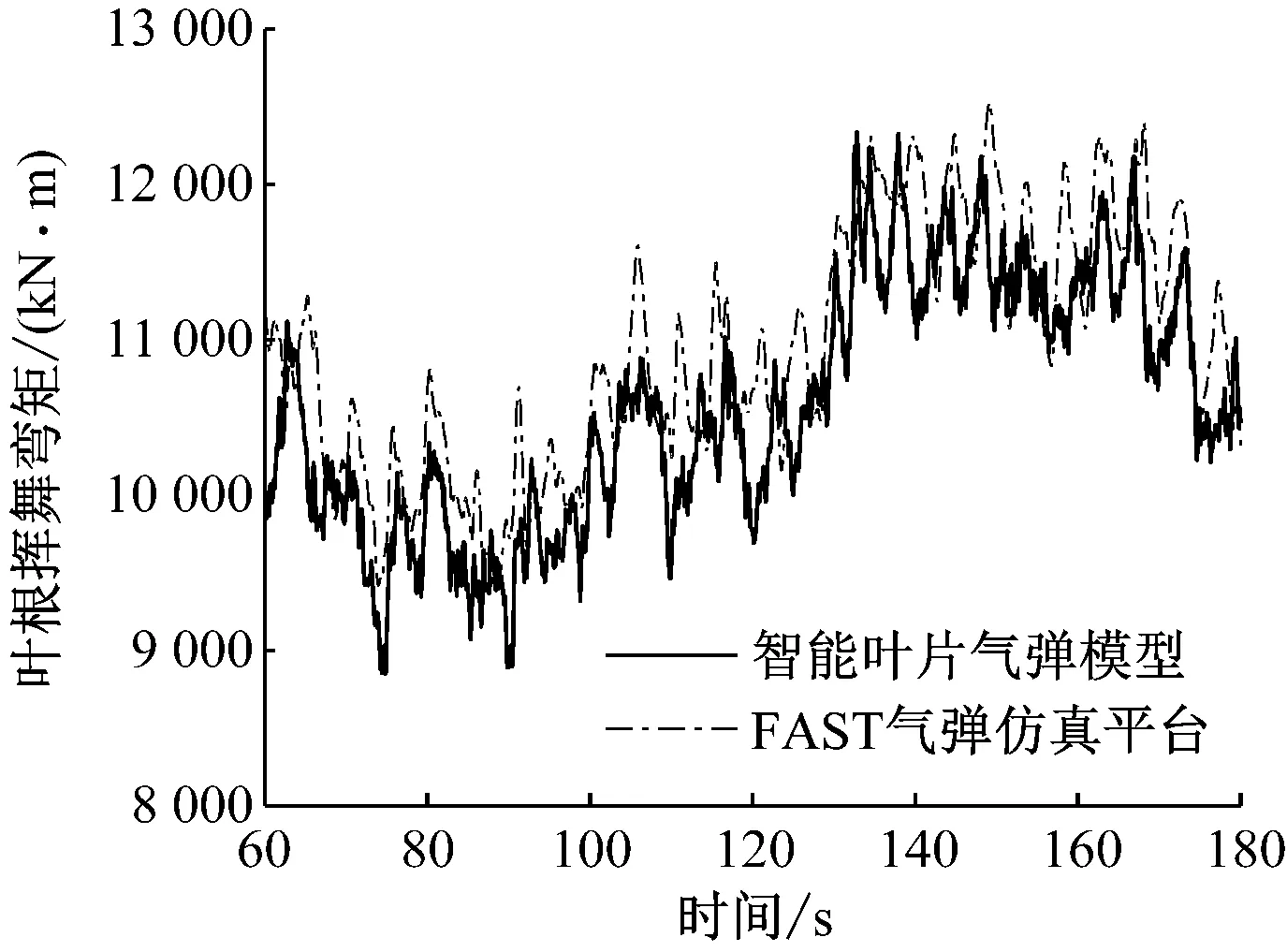
圖9 標(biāo)準(zhǔn)湍流風(fēng)況下的葉根揮舞彎矩
綜上,在整個(gè)風(fēng)力機(jī)工作范圍的穩(wěn)定風(fēng)況以及標(biāo)準(zhǔn)湍流風(fēng)況下,所建立的氣彈模型都有較高的精度。
3.2 11.4 m/s穩(wěn)定風(fēng)況不同襟翼角下葉尖偏移量及葉根揮舞彎矩的對(duì)比
在輪轂高度處風(fēng)速為11.4 m/s的穩(wěn)定風(fēng)況下,葉尖偏移量和葉根揮舞彎矩隨襟翼角的變化如圖10所示。當(dāng)襟翼角為負(fù)時(shí),揮舞方向葉尖偏移量和葉根揮舞彎矩均明顯減小;當(dāng)襟翼角為正時(shí),揮舞方向葉尖偏移量和葉根揮舞彎矩均明顯增大。襟翼角對(duì)葉尖偏移量和葉根揮舞彎矩的影響較大,說(shuō)明通過(guò)控制襟翼角,可對(duì)葉片的葉尖偏移量和葉根揮舞彎矩進(jìn)行調(diào)節(jié)。
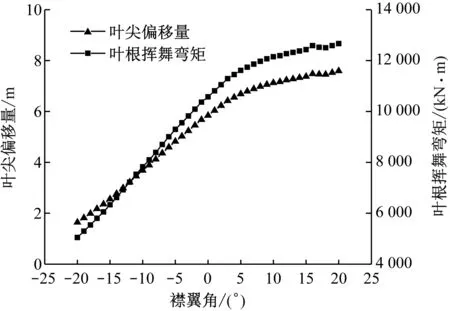
圖10 11.4 m/s穩(wěn)定風(fēng)況下葉尖偏移量和葉根揮舞彎矩隨襟翼角的變化
Fig.10 Blade tip deflection & flapwise root moment vs. trailing edge flap angle at stable wind of 11.4 m/s
4 尾緣襟翼主動(dòng)控制仿真
自適應(yīng)濾波算法能快速有效地自動(dòng)辨識(shí)系統(tǒng)模型,其中LMS算法可以自適應(yīng)調(diào)節(jié)權(quán)系數(shù),計(jì)算簡(jiǎn)單,可應(yīng)對(duì)多種復(fù)雜工況,在抵消噪聲和振動(dòng)控制等領(lǐng)域得到廣泛應(yīng)用[18]。筆者基于LMS算法設(shè)計(jì)了尾緣襟翼主動(dòng)控制器,在湍流風(fēng)況下對(duì)葉尖偏移量進(jìn)行了控制。
4.1 基于LMS算法的尾緣襟翼主動(dòng)控制系統(tǒng)
將k時(shí)刻的參考葉尖偏移量d(k)與葉尖偏移量y(k)的差值e(k)作為L(zhǎng)MS控制器的輸入,通過(guò)LMS控制器得到控制所需的襟翼角γ(k),通過(guò)所建的氣彈模型得到k+1時(shí)刻的葉尖偏移量y(k+1),如此反復(fù)進(jìn)行,其中氣彈模型所處的風(fēng)速v(k)視為系統(tǒng)擾動(dòng)。圖11給出了基于LMS算法的尾緣襟翼主動(dòng)控制系統(tǒng)框圖。

圖11 智能葉片LMS控制系統(tǒng)框圖
4.2 葉尖偏移量控制
采用圖1所示的尾緣襟翼結(jié)構(gòu),在湍流風(fēng)況下利用基于LMS算法的尾緣襟翼主動(dòng)控制方法對(duì)葉尖偏移量進(jìn)行控制,以削弱由風(fēng)況變化等原因?qū)е碌娜~片形變和減小葉片疲勞載荷。
仿真時(shí)間為250 s,風(fēng)況為輪轂高度平均風(fēng)速為11.4 m/s、湍流強(qiáng)度為3%的標(biāo)準(zhǔn)湍流風(fēng)況。
在標(biāo)準(zhǔn)湍流風(fēng)況下,對(duì)在LMS控制、PID控制和無(wú)控制下尾緣襟翼的葉尖偏移量進(jìn)行對(duì)比,如圖12所示,其中LMS控制和PID控制均從50 s開(kāi)始。由圖12可知,LMS控制和PID控制均對(duì)葉片葉尖偏移量有較好的控制效果,可減小葉尖偏移量的振動(dòng)幅度波動(dòng)和葉片的疲勞載荷。
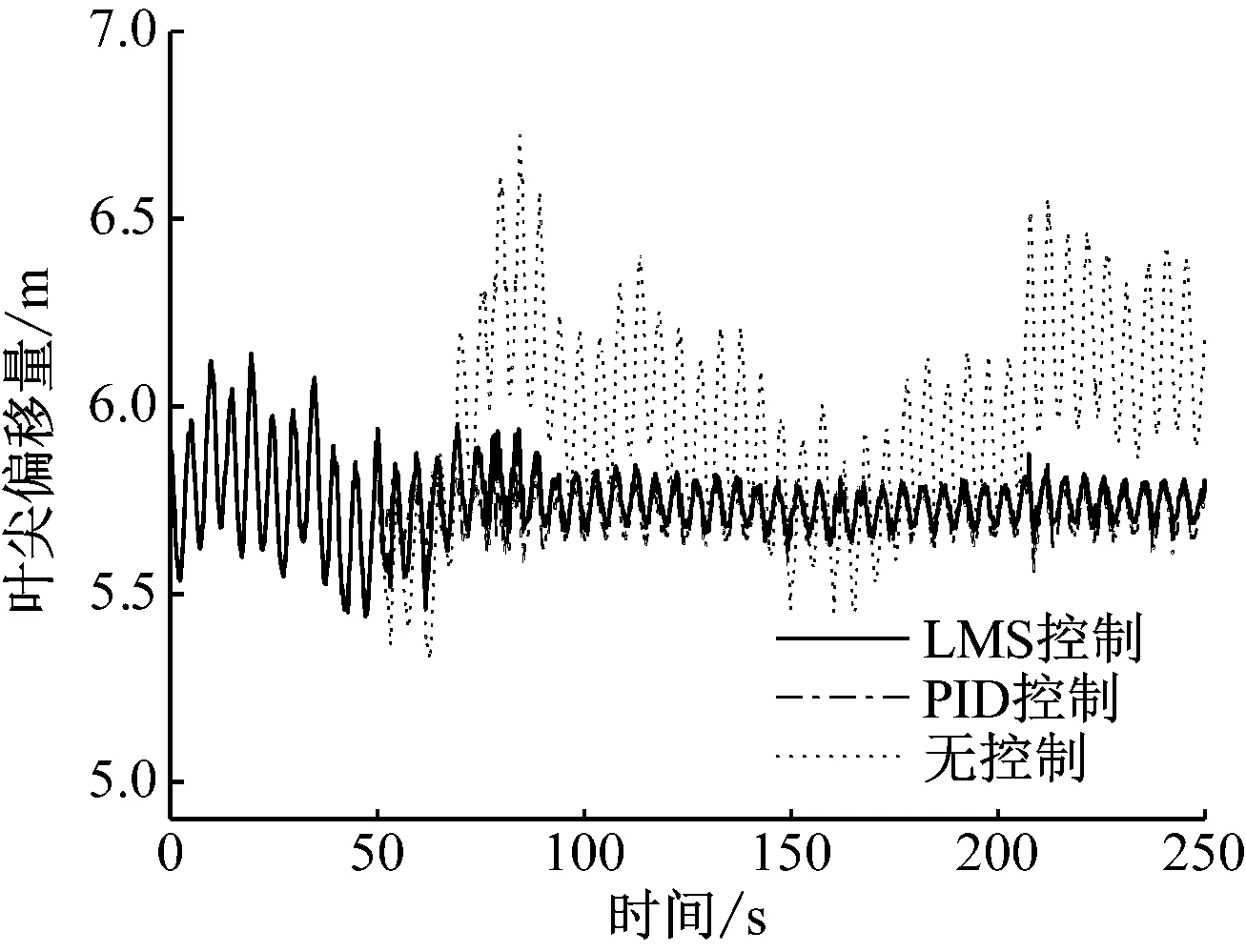
圖12 LMS控制、PID控制和無(wú)控制下的葉尖偏移量變化
Fig.12 Comparison of blade tip deflection with LMS control, PID control or without control
在LMS控制、PID控制和無(wú)控制下襟翼角的變化如圖13所示。LMS控制在控制開(kāi)始階段有自適應(yīng)辨識(shí)過(guò)程,這段時(shí)間內(nèi)控制量逐漸增大,控制效果逐漸增強(qiáng)。控制器達(dá)到穩(wěn)定狀態(tài)后,LMS控制和PID控制下的襟翼角變化趨勢(shì)大致相同,對(duì)葉尖偏移量起到了有效控制作用。表2給出了LMS控制、PID控制與無(wú)控制下葉尖偏移量的標(biāo)準(zhǔn)偏差。由表2可知,LMS控制和PID控制能有效減小葉片葉尖偏移量的波動(dòng),LMS控制下葉尖偏移量的波動(dòng)更小,較PID控制下葉尖偏移量的標(biāo)準(zhǔn)偏差減小25.60%。
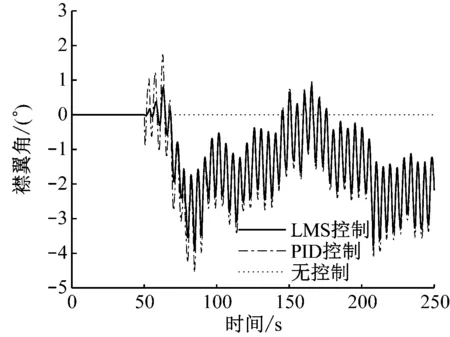
圖13 LMS控制、PID控制和無(wú)控制下襟翼角的對(duì)比
圖14給出了LMS控制與無(wú)控制下葉根揮舞彎矩的變化, LMS控制不僅控制葉尖偏移量,還可以有效控制葉根揮舞彎矩。
表2LMS控制、PID控制和無(wú)控制下葉尖偏移量的標(biāo)準(zhǔn)偏差
Tab.2StandarddeviationofbladetipdeflectionwithLMScontrol,PIDcontrolorwithoutcontrol

控制情況LMS控制PID控制無(wú)控制標(biāo)準(zhǔn)偏差0.041 80.052 50.247 0
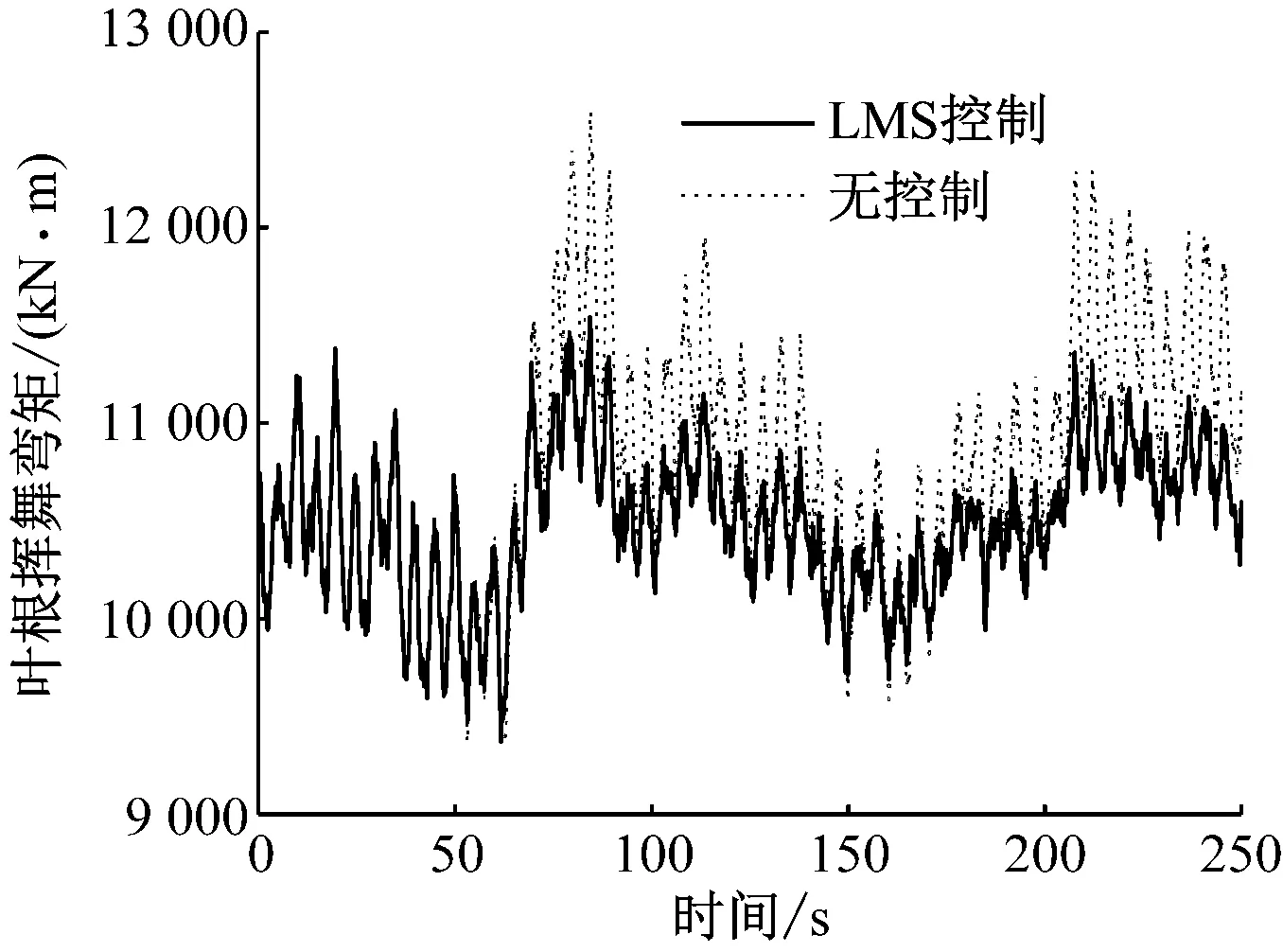
圖14 LMS控制和無(wú)控制下葉根揮舞彎矩的變化
5 結(jié) 論
(1)與FAST平臺(tái)相比,在風(fēng)力機(jī)正常工作的穩(wěn)定風(fēng)況以及標(biāo)準(zhǔn)湍流風(fēng)況下氣彈模型的葉尖偏移量和葉根揮舞彎矩的誤差均不超過(guò)7%,氣彈模型精度較高。
(2)在11.4 m/s的穩(wěn)定風(fēng)況下,隨著襟翼角的變化,葉尖偏移量和葉根揮舞彎矩也產(chǎn)生較大變化,這說(shuō)明控制襟翼角可有效調(diào)節(jié)葉尖偏移量和葉根揮舞彎矩。
(3)在平均風(fēng)速為11.4 m/s的標(biāo)準(zhǔn)湍流風(fēng)況下,基于LMS算法的尾緣襟翼主動(dòng)控制方法可有效減小葉尖偏移量波動(dòng)和疲勞載荷,與PID控制相比,其葉尖偏移量的標(biāo)準(zhǔn)偏差減小25.60%,說(shuō)明基于LMS算法的尾緣襟翼主動(dòng)控制方法能更有效地減小葉尖偏移量的波動(dòng)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 動(dòng)力工程學(xué)報(bào)的其它文章
- 高效超超臨界汽輪機(jī)轉(zhuǎn)子鋼FB2的低周疲勞特性研究
- 調(diào)諧質(zhì)量阻尼器對(duì)漂浮式風(fēng)力機(jī)穩(wěn)定性的影響
- 中國(guó)鍋爐熱工性能試驗(yàn)標(biāo)準(zhǔn)與美國(guó)ASME PTC 4-2013對(duì)比研究
- 貼壁風(fēng)對(duì)300 MW四角切圓鍋爐高溫腐蝕特性影響的數(shù)值模擬
- 風(fēng)電機(jī)組串聯(lián)系統(tǒng)維修方法的研究
- 基于小波能譜熵和集成經(jīng)驗(yàn)?zāi)B(tài)分解的傳感器故障診斷耦合算法研究