地面三維激光掃描點云質量評價技術研究與展望
2018-08-29 06:16:18花向紅趙不釩陳西江
地理空間信息 2018年8期
花向紅,趙不釩,陳西江,宣 偉
(1.武漢大學測繪學院,湖北 武漢 430079 ;2. 武漢理工大學資源與環境工程學院, 湖北 武漢430072;3.武漢理工大學土木工程與建筑學院, 湖北 武漢430072;4.武漢大學災害監測和防治研究中心,湖北 武漢430079)
地面三維激光掃描技術(Terrestrial Laser Scanning,TLS)是上世紀90年代發展起來的一種快速獲取三維空間信息的技術手段,該技術通過非接觸式掃描的方式獲取目標物表面信息,包括目標物的點位信息,以及目標物的距離、方位角、天頂距和反射率等。每秒掃描數據可高達上百萬,所獲數據為離散的點云形式,稱為點云數據。對點云數據進行處理,可實現對掃描目標的三維重建以及其他多種應用功能。利用激光點云產品之前需要準確確定點云數據的精度和可靠性,而點云質量包含點云數據精度和點云模型精度,正因為如此,對點云數據及點云模型質量進行評價才顯得尤為重要。三維激光掃描技術與傳統技術不同之處在于獲取的是目標物的大量點云,無法確定對應點在目標物上的具體位置,采用傳統的點位精度評定方法有一定的局限性。自從三維激光掃描開始應用于測量領域,國內外學者和工程技術人員對點云數據質量進行了大量研究,主要集中在點云誤差來源、點云空間分辨率、點位精度、點云誤差空間、配準精度、簡化精度、三維建模精度等方面,并取得了一定的成果。本文主要介紹了地面三維激光掃描點云質量評價技術研究成果,并對地面三維激光掃描點云質量評價發展趨勢進行了展望。
1 點云質量評價
點云質量評價包括點云數據質量和點云產品質量評價,點云數據質量評價主要是根據離散點自身誤差所建立的點云誤差空間模型,再由點云誤差空間模型推算點云標準差;點云產品質量評價主要是研究點云所構成模型的精確度,包括點云模型與目標物的契合度、屬性信息的精確度等。
1.1 點云數據誤差來源及自檢校模型
地面三維激光掃描的誤差源是評價掃描點云數據質量和掃描儀性能的基礎。地面三維激光掃描儀的誤差源多種多樣,按照誤差產生的原因分為5類[1]:地面激光掃描儀的儀器誤差、掃描物體表面特性引起的誤差、環境因素引起的誤差、數據采集方法以及點云數據處理過程中產生的誤差。其中,地面激光掃描儀的儀器誤差主要由其內部的激光測距儀、激光偏轉單元等部件引起,可以分為測距誤差、激光偏轉單元與測角誤差以及軸系誤差3個方面。掃描物體表面特性引起的誤差直接影響激光測距結果,激光測距精度主要受目標物體表面的粗糙程度、物體的材質和顏色、物體的溫度和濕度、激光入射角等因素影響。不同材質的物體表面,激光的反射率與滲透作用不同,進而導致接收到的返回激光信號強度不同,直接影響測距精度。環境因素引起的誤差主要由周圍環境的溫度、相對濕度、氣壓、光照條件、周邊的輻射干擾、架設掃描儀的地面的不穩定性等引起,溫度、相對濕度和氣壓主要是影響激光信號在大氣中的傳播速度和傳播路徑,而光照條件影響目標物體的反射率。
在國外,Lichti對掃描儀測量誤差進行了系統研究,給出地面三維激光掃描儀的角分辨率與掃描間隔、掃描儀量化精度和光斑直徑的關系。點云空間分辨率分為角度分辨率和距離分辨率,角度分辨率決定了目標細節的提取能力。角度分辨率受光斑大小、掃描間隔和量化精度共同影響,提出了角度分辨率的平均調制傳遞函數模型和有效瞬間視場角模型;國內學者施貴剛[1]等分析了點云數據獲取過程中的誤差來源及其對掃描精度的影響。
地面激光掃描儀自身的誤差大多屬于系統誤差,是影響點云數據質量的重要因素,因此需要通過精密檢修以及檢校來減弱或消除影響。目前,地面激光掃描儀的檢校主要分為單項檢校法和自檢校法兩種方式。單項檢校法是指按照儀器的組成部件,如激光測距系統與角度測量系統分別進行檢校[2-4],這種檢校方法需要建立檢校場。
自檢校法可以將掃描設備所有系統誤差看作一個整體,通過外部已知條件同時求解所有系統誤差以及其他系統參數。運用自檢校法進行掃描儀的系統誤差檢校已經越來越普遍。Bae等在假設掃描測角測距系統與全站儀類似情況下,將掃描儀的測距系統誤差分成8種,水平測角系統誤差分成7種,豎直測角系統誤差分成4種,提出了掃描儀系統誤差自校正模型,并采用數值模擬法和室內標靶自校正實驗計算了Faro880掃描儀的系統誤差。Rietdorf 等(2004)利用全站儀的誤差模型,提出了基于剛體變換的掃描儀自檢校模型的概念。官云蘭等(2014)利用全站儀系統誤差的模型對掃描儀的系統誤差進行研究,詳細闡述了基于剛體變換的系統誤差自檢校方法,通過對掃描坐標進行系統誤差改正提高了點位精度。Lichti[5](2010)對各種自校正模型進行了綜述,并將目前的自校正模型分為基于平面的自校正模型和基于標靶點的自校正模型兩種,給出了兩種參數約束條件。其后,一些學者圍繞這兩種檢校方法展開了地面激光掃描儀的系統誤差檢校工作。Chan 等(2015) 提出了一種基于圓柱特征的地面激光掃描儀自檢校模型,從實驗結果中可以看出,該自檢校方法能夠從一定程度上減弱檢校參數之間的相關性。宣偉等(2016)根據Lichti[6](2011)模型提出,檢校參數之間的相關性及其自身的顯著性是影響自檢校法結果可靠性的直接因素,提出了基于參數自動優化的地面激光掃描系統誤差自檢校方法,建立了基于21個附加參數的系統誤差參數模型,推導了基于靶標點的自檢校法計算公式,針對解算參數之間的相關性與顯著性,提出了參數自動優化方案,得到了相關性低、顯著性高的最優參數組合,最大程度上消除了系統誤差對點云數據質量的影響。
1.2 點位誤差模型
對于激光點位誤差(或點位精度),目前主要是根據儀器廠商所提供的性能指標,根據測距、測角與激光點位的關系,利用誤差傳播規律得到激光點位誤差模型,從而判斷點云數據質量。根據學者研究,激光點位誤差主要由兩部分組成,一部分為由激光掃描儀本身測距、測角機理所產生的點位精度Dρθφ-xyz;另一部分則是由激光發散性所產生的基于光斑影響的點位精度Dspot-xyz[7]。
1.2.1 測距測角引起的點位誤差Dρθφ-xyz
根據三維激光掃描原理,地面激光掃描儀的原始觀測值為距離觀測值φ、水平角觀測值φ及垂直角觀測值θ,假設在某一掃描儀坐標系下的任一激光掃描目標點坐標為X=[x y z]T,則激光點位Xin與測距、測角之間的關系為[8]:
激光點位Xin理論情況下服從正態分布,根據誤差傳播規律可得到激光點位Xin的協方差矩陣:

Cinst中的測距精度是在入射角為0情況下的結果,而實際掃描過程中,激光波束與掃描目標基本不垂直,因此需要考慮入射角對測距精度的影響。Darion Grant(2012)[9]考慮了入射角對測距精度的影響,假設入射角為α,則其測距精度為從而測角、測距協方差變為:

由文獻(Sylvie Soudarissanane,2011)[10]可知,入射角α可以表示為激光束向量與任一點激光點位法向量的形式:

式中,→為激光束向量,為任一點法向量。
由式(2)可得到激光點位坐標Xin的協方差為:

1.2.2 光斑影響下的點位誤差Dspot-xyz
光斑對點位精度影響的前提是光斑大小的計算,光斑大小由激光波束寬度決定,是激光點位不確定性的范圍。關于光斑大小的計算方法有很多種,陳西江[11]等(2015)研究了同時考慮入射角和發散角的廣義情況下光斑大小計算模型,利用掃描間隔對相鄰光斑大小的影響計算了平均光斑大小。給出了發散角和入射角影響下服從不同分布函數的光斑大小點擴散函數,依據光斑大小點擴散函數,計算了激光點位在光斑水平和垂直方向的標準差,得到基于光斑影響的點位精度。
根據激光系統特性,對于脈沖式激光掃描儀,脈沖中的能量沿著光斑中心不是均勻的,是近似地服從對稱的高斯分布(正態分布),因此在確定激光點位與光斑關系時,在同時考慮入射角α和發散角β的情況下,其協方差矩陣如式(6)所示:
1.3 點位誤差空間模型
點位誤差空間表示的是激光點位在某個區間內的不確定性。不確定性是客觀世界或現象本身的不精確性、隨機性和模糊性,包括位置不確定性、時域不確定性和空間數據不完整性等。激光點位不確定性的研究集中于空間位置的不確定性[12]。三維激光點云數據質量由三維方向的點位誤差空間決定,誤差橢圓分析的是目標平面上的誤差區間,因此,可以基于誤差橢球方法表達激光點位誤差空間,基于誤差橢球表達的激光點位誤差空間由于需要確定橢球縮放系數,造成了其表示的誤差空間的不確定性[13]。
1.3.1 利用點云誤差橢球評價點云精度
在激光點位服從正態分布的情況下,點位誤差空間一般用誤差橢球來表示。由點位誤差空間模型可知,三維激光點位已經演變為誤差橢球形式,根據正交矩陣理論,將誤差橢球形式化為標準橢球形式[14]。

式中,橢球半軸長度為a=kλ1;b=kλ2;c=kλ3;k為誤差橢球縮放系數,、和分別為C矩陣的X特征值。
根據公式(7)表示的誤差橢球標準形式,可得到激光點位概率密度函數為:

則激光點位落入誤差橢球G′內的概率為:

代入式(9),得到點位概率為:

利用球坐標積分形式將式(10)化為:

根據式(11)即可計算激光點位落入誤差橢球內的概率;k為誤差橢球的縮放因子,選取不同的k值計算得到對應的概率值,結果如圖1所示。
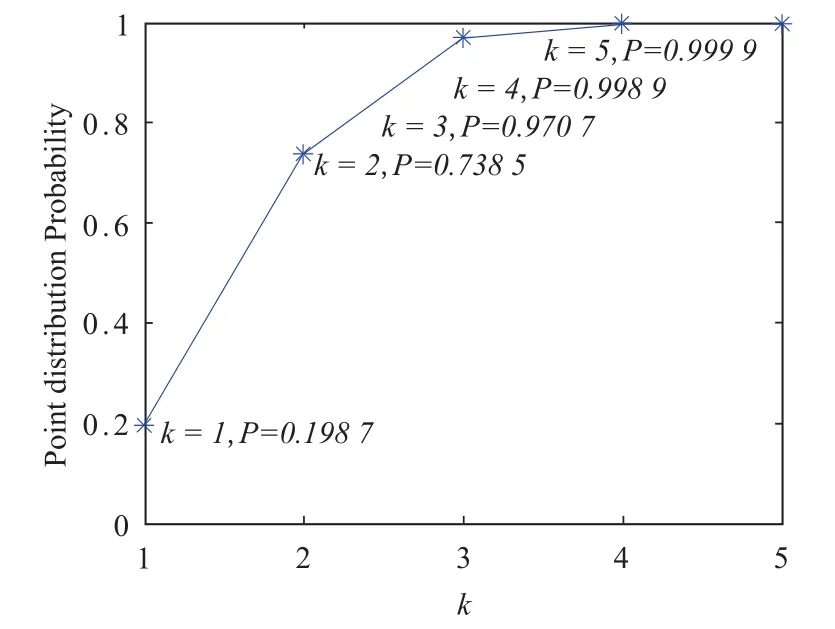
圖1 縮放因子k與激光點位落入誤差橢球內的概率
由圖1可以看出,不同的縮放因子k對應著不同的點位概率,k的選值決定了激光點位落入誤差橢球內的概率。因此,在實際計算點位誤差橢球時,需要根據要求選取合適的縮放因子。一般情況下,選取k=2,產生一個概率為73.85%的誤差橢球;當k=3時,激光點位落入誤差橢球內的概率已經高達97.07%,該誤差橢球基本上包含了所有的誤差信息,因此將k=3對應的誤差橢球作為極限誤差橢球[15]。
在考慮相鄰點位誤差橢球相互影響的情況下,掃描間隔對點云誤差橢球的影響較大。在相鄰誤差橢球存在交集的情況下,根據相鄰誤差橢球公式,可以計算相鄰誤差橢球交集體積,從而得到相鄰誤差橢球體積,計算平均點位誤差橢球,從而消除了相鄰點位誤差橢球重合度的影響。再由誤差橢球與點位中誤差的關系確定點云精度,即實現了利用誤差橢球對點云精度的評價[16]。該評價指標真實地反映了點云精度的好壞,為不同設備獲取的點云進行精度對比分析提供了有力的計算模型,同時可以實時地監測到掃描點云任意地方的精度狀況,為用戶采取合適的掃描方式提供了理論基礎。
1.3.2 利用誤差熵評價點云精度
在激光點位分布不服從正態分布的情況下,無法采用誤差橢球來評價點位誤差,部分學者將信息論中的信息熵與誤差熵引入到三維點位誤差空間評價中。誤差熵這一概念由信息熵推廣而來,即對激光點位橢球模型的廣義信息熵進行極坐標積分,從而得到廣義的誤差熵模型。陳西江[17](2014)推導了激光點位誤差熵模型,廣義n元P-范分布的信息熵為:
當P=1時,P-范分布退化為拉普拉斯分布,其信息熵為:

當P=2時,P-范分布演變為正態分布,其信息熵為:

令DX的特征值為,則式(14)為:

n元P-范分布函數下的誤差熵為:
由式(16)得到n元P-范分布的誤差熵與激光點位誤差橢球的關系:

式(17)建立起了n元P-范分布誤差熵與點位誤差空間之間的關系。
根據對激光點位誤差分布進行統計分析可知,激光點位服從的是P=1.7的P-范分布。利用誤差熵對激光點位精度進行分析方法,可以間接地將點位誤差轉為誤差橢球的形式,當n=3,P=1.7時,式(17)誤差熵轉化為近似誤差橢球形式,如式(18)所示:

根據式(18)計算每個激光點位的誤差熵,該誤差熵表示的誤差空間如圖2所示。
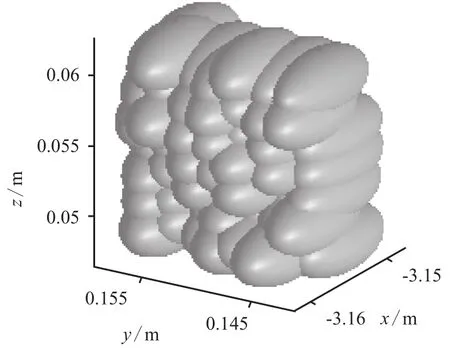
圖2 誤差熵(k=2.388)
計算誤差熵對應點云誤差橢球的實際體積,得到點云誤差空間,并根據點云實際誤差橢球體積計算每個激光點位的平均誤差空間,從而得到對點云及點位精度的評定。實驗結果表明,用該方法可以實現不同分布狀況下點云及點位誤差空間的評定,為點云數據質量的評價提供了基礎。
1.3.3 工程應用
宣偉[18]等(2016)從測距測角誤差以及光斑大小出發,基于誤差橢球理論,建立了激光點位誤差空間模型,考慮了點云數據中相鄰點位誤差空間之間的交集,得到了點云實際誤差空間與點位實際誤差空間,根據兩者的關系,確定了點云變形可監測性指標,來區分點云誤差與真實的變形量。將該方法用于武漢二七長江大橋主塔變形監測中,檢驗其可行性。其變形提取的結果見表1。其中,2014年9月第一次掃描的橋塔點云數據作為變形計算的參考點云,周期1是指2014年11月相對于2014年9月;周期2是指2015年1月相對于2014年9月。x方向是指水流方向;y方向是指橋體方向;z方向是指鉛垂方向。表2給出了沿著x、y、z方向的變形可監測性指標DMI計算結果。為了更直觀地分析變形計算的結果,計算QF值,結果如圖3所示。
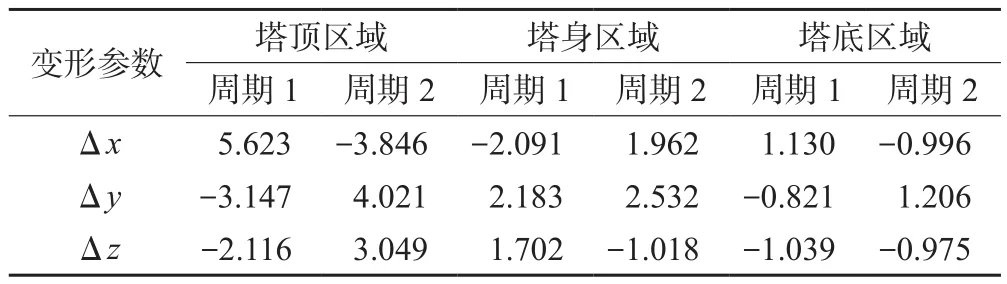
表1 橋塔上3個區域的變形參數(Δx,Δy,Δz)/mm

表2 沿著x, y, z 方向的變形可監測性指標計算結果/mm
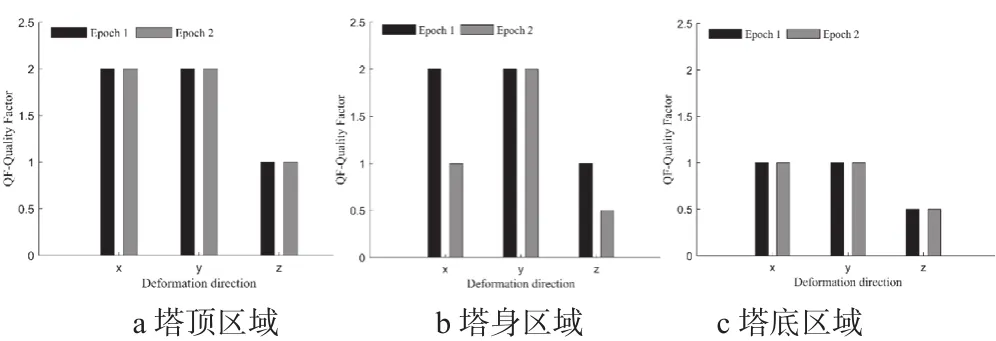
圖3 橋塔上3個區域的Quality factor (QF)結果
由圖3、表1、表2可以看出,3個監測區域在z方向都不存在任何明顯的位移,即未出現任何明顯的沉降。對于塔身區域在水平方向上也存在一定的位移,而塔頂區域在監測期間在水平方向上存在位移的情況,可能是溫度和風力導致橋塔出現了擺動所致。
1.4 點云配準質量評價
三維激光掃描的過程中,由于物體的遮擋、掃描儀的限制等原因,要完成對一個物體的完整三維數據獲取,地面三維激光掃描儀需要多測站多角度進行掃描。而每站掃描獲得的點云坐標為掃描儀中的坐標系,需要將多測站多角度的點云配準到全局坐標系下。由于儀器本身的原因、 設站位置的差異以及外界條件的影響,都會使配準產生誤差,而且點云配準過程中誤差會傳遞。同時,為了滿足工程需要,應將掃描的點云配準到工程坐標系統中,也涉及到點云全局坐標系統配準到工程坐標系統的誤差傳遞。目前,點云配準主要有標靶配準和無標靶配準兩種方式。
程效軍[19](2009)研究了點云配準誤差傳播的規律,按照攝影測量影像匹配的原理,對地面激光掃描儀采集的點云數據進行配準,根據間接平差、協因數傳播原理以及協方差傳播定律得出了多站配準點云誤差傳播的數據模型及其計算方法。通過實驗,驗證了點云配準精度與點云模型累積誤差的定量關系,實現了點云配準精度的評估。
施貴剛[20](2009)針對六參數表示的點云配準模型,利用誤差傳播定律,推導出了基于六參數的點云配準誤差傳播模型;楊榮華(2011)在分析了點云四元數配準模型的基礎上,利用矩陣微分性質和誤差傳播定理,推出了基于四元數配準模型的誤差評價模型,同時還推導出觀測值精度和平移參數精度已知情況下的四元數求解精度計算公式。
1.5 點云簡化質量評價
點云簡化后質量評價主要從簡化精度、簡化率、簡化速度3個方面來衡量。簡化精度即精簡后的點云數據所表達的曲面與原始點云數據所表達的曲面之間的誤差,因此要保證誤差在可接受范圍內,并且盡可能多地保留原始點云數據中的特征信息。簡化率即精簡后的點數相對于原始點數的百分比,反映了點云數據簡化的力度,應在保證簡化精度的前提下,盡可能減少數據點數。在實際操作中,為了保證后續模型重建的質量,需要選擇合適的簡化率。簡化速度即在保證精度和簡化率的前提下追求更高的效率和更快的速度。
目前,點云簡化精度的評價一般是通過簡化前后圖像的對比分析實現的,評價結果具有較大的主觀性,缺乏定量的評價分析。考慮到點云簡化過程中保留的幾何特征信息的多少會直接影響到最終點云模型重建的質量,因此,點云簡化精度的評價還可以轉化為精簡后的點云數據所包含特征信息的量化問題。武劍潔(2004)通過熵理論來描述局部點云的特征信息,利用局部熵突變發生在曲面形狀變化劇烈區域的特性,描述采樣點所包含的局部特征信息量,如果是基于點法向量的概率密度函數計算的熵值,則熵值越小,說明該點所在的鄰近區域法向量近似相同,該點所在的局部區域無序程度越高;反之,熵值越大,該點所在的局部區域無序程度越低,即熵值的大小能夠直接反映局部曲面的變化狀況。簡化后任意點的信息熵為:
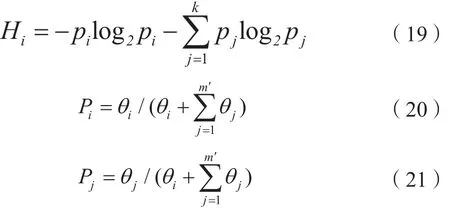
式中,θi表示點i的法向量夾角;θj表示點i鄰近點j的法向量夾角;pi與pj分別點i及j的法向量夾角的概率分布。點云平均熵為:

簡化后,熵值越大,說明平面保留的點較多,特征表面變化明顯區域保留的點較少;熵值越小,說明平面保留的點較少,特征表面變化明顯區域保留的點較多;平均熵越小,特征表面變化明顯區域的點越多,對掃描物體的描述越精確。
1.6 點云產品質量評價
點云產品質量直接關系到點云產品應用的可靠性,對點云產品質量進行準確評價顯得尤為重要,而點云產品主要是點云所構建的三維模型,因此,對點云模型質量的評價就可直接反映點云產品質量的評價。目前,對點云三維模型質量評價的主要方法有主觀評價方法和客觀評價方法[21]。而主觀評價方法主要依靠人的肉眼觀測對模型表面粗糙度進行評價。該評價方法簡單直觀,但需要耗費大量的人力和時間,并且受觀測者個人因素的影響較大,降低了點云產品評價的公平性和準確性。而客觀評價方法主要是依靠所構建的數學模型進行評價,該方法可以避免人的主觀判斷對評價造成精度缺失的影響,有效提高點云模型評價的準確度和效率。
點云產品形式很多,包括建筑物點云模型、工業產品模型如文物點云模型等。 不同的點云產品形式,其質量評價方式也不相同。 針對建筑物點云模型,可以根據建筑物表面特性評價點云模型精度,如Acka 等利用三維表面匹配來評定建筑模型的點云質量。三維表面匹配可以估計建筑點云與驗證點云之間的歐氏距離,而該歐氏距離與點云數據獲取方法無關,通過該距離可以確定三維模型的質量,同時解決了參考系統精度、點位精度及數據完整性問題,可以作為建筑物點云數據質量的評定方法。
由于工業產品表面并不是完全規則的,無法根據表面特性來實現點云模型精度的評價。針對此,首先可以通過計算工業三維模型表面的高斯曲率、截面曲率、斜率、雙向曲率、法向矢量等,實現工業產品局部曲面質量的評價。其次,根據工業產品表面整體幾何尺寸、面積或幾何特征間的約束關系,如通過計算工業產品孔、槽之間的尺寸和定位關系,實現工業產品三維模型整體精度的評價。
以上方法主要是通過利用所構建的點云模型進行直接的質量評價,由于構建點云模型的方法不同,因此,根據不同點云模型構建方法及實現的不同點云模型產品,實現對點云模型精度的評價,如點云模型構建方法主要有顯式和隱式方法,顯式方法主要是基于原始點云進行三角網的構建,通過該方法構建點云模型的精度評價,主要是根據點位誤差和誤差熵之間的關系[22]構建三角網中點與點之間的線元誤差熵[23],并最終實現三角網誤差熵模型的構建,利用該模型可以實現對點云顯式模型的精度評價。而隱式方法主要是在原始點云數據基礎上進行內插,然后通過密集點云的三角網重建實現點云模型重建。
2 展 望
地面三維激光掃描技術目前已經被廣泛應用于文化遺產保護、考古、滑坡監測等領域,該技術應用的關鍵是獲得物體表面的大量點云數據,而在廣泛應用過程中主要關注前期的數據處理,包括點云配準、點云簡化、點云去噪、點云分割、三維建模及紋理映射等幾個方面。通過前期的點云數據處理,獲得用戶所需要的各類點云產品,如目標物特征信息、目標物分類信息、滑坡變化信息、工業、廠房及各種建筑文物設施的三維模型等。在獲取點云產品后,很少對其應用的可靠性進行準確評價,即點云數據和點云模型的質量評價是點云產品得以有效和準確應用的基礎和保障,它是測繪及其他行業研究的一個重要內容。點云質量評價是一個系統工程,涉及到點云數據精度和點云模型精度模型的構建,由于點云不是單一的點,因此,點云數據精度將會更多地考慮相鄰點誤差相互影響后所形成的點云誤差模型。而點云模型精度將會根據不同的模型構建方法,運用不同的精度評價方法實現點云模型精度的評價,最終形成自適應評價體系。同時,點云模型是非離散數據格式,在對點云模型精度評價的過程中,將會引入新的評價模型,如曲面光滑度、粗糙度等模型來實現點云模型局部和整體精度的準確評價。在實現點云數據和點云模型精度評價體系構建后,才能真正實現地面三維激光掃描應用可靠性的普及,充分發揮地面三維激光掃描技術的優勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51