車輛主動座椅懸架的天棚反步控制器設計
2018-08-30 14:38:08趙強,張娜
噪聲與振動控制 2018年4期
趙 強,張 娜
(東北林業大學 交通學院,哈爾濱 150040)
車輛座椅懸架系統的振動影響到汽車行駛平順性和乘坐舒適性。為了使座椅懸架系統達到良好的減振性能,主要從以下兩個方面對其進行改進,一是優化被動懸架,但是效果有限;二是采用主動懸架并設計性能優良的控制器[1],能使座椅懸架減振性能有較大提升。懸架模型是主動懸架控制器設計的基礎,在國內外建立的懸架動力學模型中,較常見的主要有2自由度的1/4車輛模型、4自由度的1/2車輛模型及7自由度的整車模型等[2]。本文將在2自由度的1/4車輛模型基礎上構建包含車輛懸架的3自由度座椅懸架模型。在主動座椅懸架的控制方面采用不同的控制策略,主動懸架所能達到的減振效果也存在很大差異,因此可以說控制方法實際是主動懸架的核心。目前針對主動懸架提出的控制策略包括:PID控制[3]、天棚阻尼控制[4]、最優控制[5]、自適應控制[6]、模糊控制[7]、神經網絡控制[8]、crone控制[9]等。其中天棚(Sky-Hook)控制由于其算法簡單,工程中易于實現,在主動、半主動懸架控制中被廣泛應用。
反步法(即反演法或backstepping法)一般與Lyapunov型自適應律相結合使用,就是將控制律和自適應律綜合起來考慮,使整個閉環系統動態性能和靜態性能達到預期要求。該方法由Ioannis Kanellakopoulos等于1991年在參考文獻[10]中首先提出,反步控制在很大程度上可以改善線性系統和某些非線性系統的過渡過程。在釆用反步法實施控制的過程中,始終以函數的收斂性為目標,不斷地化繁為簡,巧妙地將復雜的非線性系統逐步分解成不超過原系統階數的若干個子系統。在考慮穩定性定理以及指數穩定性定理的基礎之上,在反步的思想中,引入了虛擬控制的概念。所謂虛擬控制,其本質就是一種靜態補償的思想。這種思想的引入就是要想使前面的子系統達到穩定的效果,就必須通過對后面的子系統進行虛擬控制來實現。在算法的設計過程中,需要為每一個分解后的子系統分別設計函數以及相應的中間虛擬控制量,一直“后退”到整個系統。此時再將它們統一集成起來,共同完成對于整個系統的控制律設計,最終實現系統的全局調節或跟蹤,使系統達到期望的性能指標。總而言之,反步法就是通過不斷地對算法進行修正來設計最終的控制器,以實現系統的預期目的。
考慮到天棚阻尼控制算法和反步法都具有良好的控制效果,本文結合天棚控制理論與反步控制理論形成天棚反步控制器。具體來說,本文把座椅懸架的天棚阻尼控制器作為參考模型,并與座椅懸架模型進行比較,從而得到誤差動力學方程,并把誤差矢量當做反步控制器的狀態量,在保證系統達到一致漸進穩定的前提下,將誤差矢量的加速度分量提供給系統,最終得到實時的作動力,最后通過數值仿真比較該控制器與被動及PID控制的減振效果,且通過分析該控制器的座椅加速度、速度和位移等性能來證明此控制器的有效性,且該系統保證了最終誤差是指數漸近穩定的。
1 1/4車輛-座椅模型
圖1為1/4車輛-座椅懸架的結構模型。其基于如下假設:
(1)將人體和座椅作為一個整體來處理;
(2)人體座椅質量、懸掛質量和非懸掛質量均視為剛體;
(3)將人椅、懸掛簡化為只考慮剛度和阻尼的元件;
(4)輪胎具有線性剛度,忽略輪胎阻尼對振動的影響,路面輸入在輪胎與路面的接觸點上。圖中ms、mv、mt分別為座椅懸架(包括人體)、1/4車身和輪胎的質量,zs、zv、zt分別為其對應的位移,ks、kv、kt和cs、cv分別為對應的系統的剛度系數和阻尼系數,Fd為減振器的可變阻尼力,z0為外界路面對系統的位移激勵。
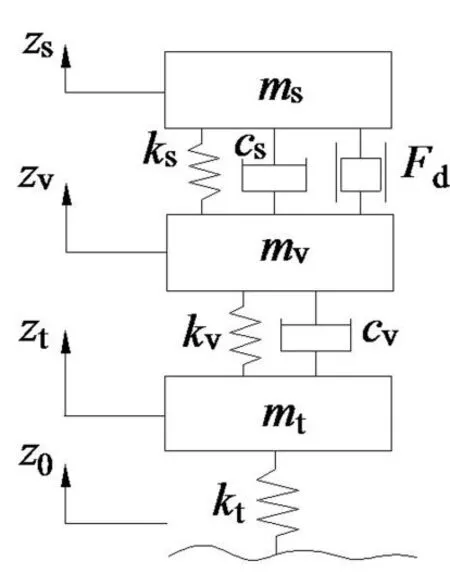
圖1 1/4車輛-座椅的結構模型
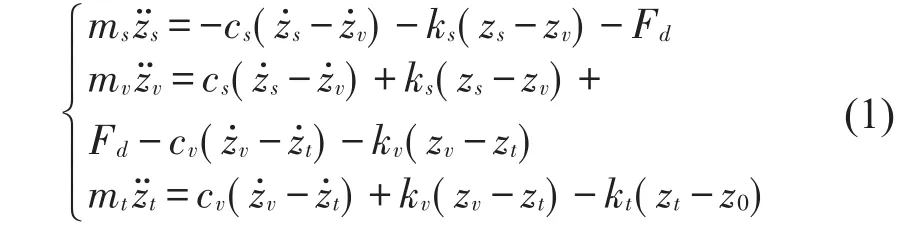
根據牛頓第二定律建立相應的動力學方程
2 天棚反步控制器設計
針對主動座椅懸架系統所提出的天棚反步控制方法如圖2所示。首先針對座椅懸架系統設計一個有效的參考模型,使座椅懸架的輸出加速度跟蹤參考模型的理想加速度,把二者的誤差作為反步控制器輸入,通過設計反步控制器使上述誤差趨近于零,座椅加速度就會大大降低,舒適性就會顯著提高。
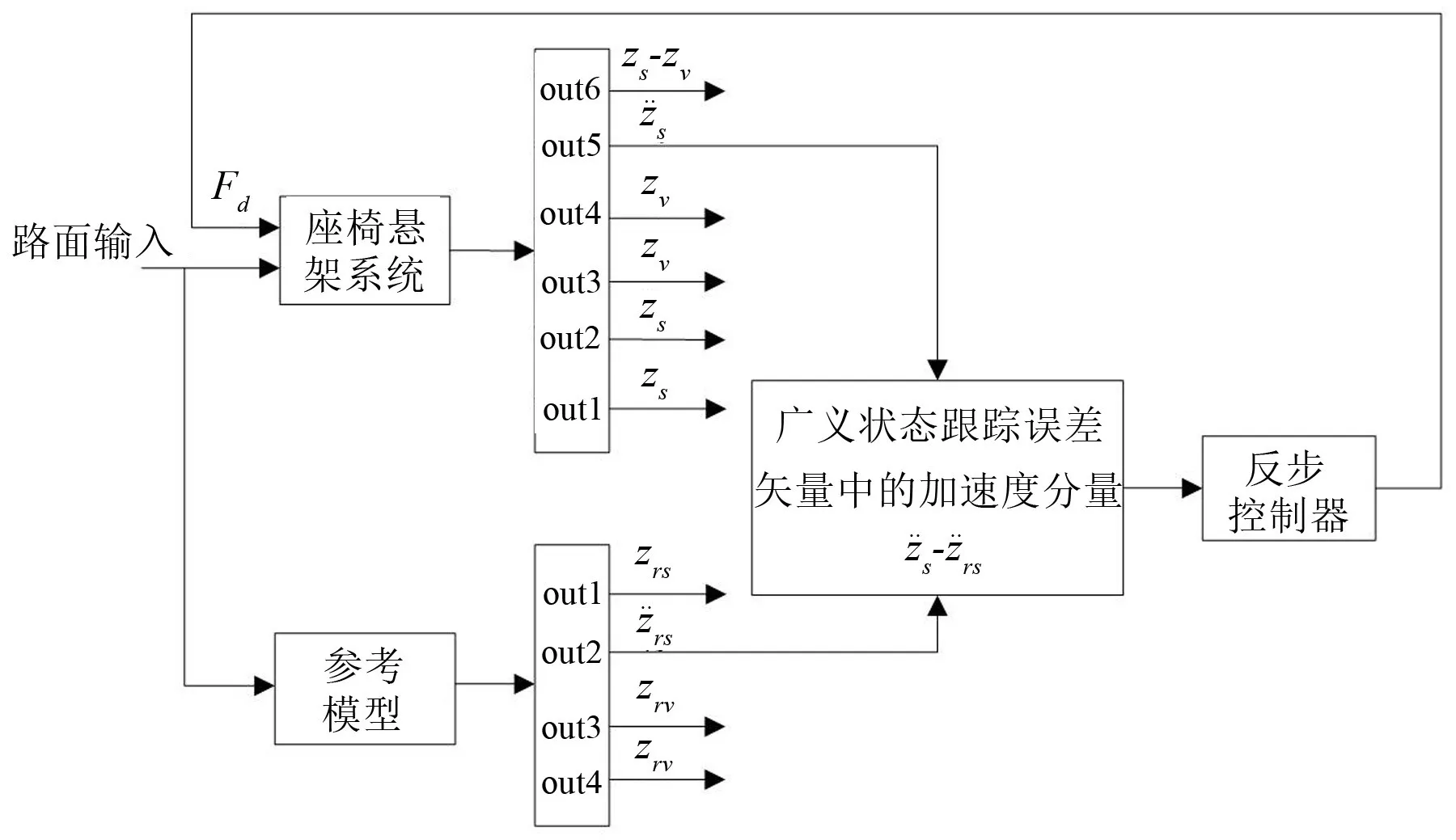
圖2 控制方框圖
根據圖3,首先設計參考模型,然后按照反步法進行反步控制器的設計。
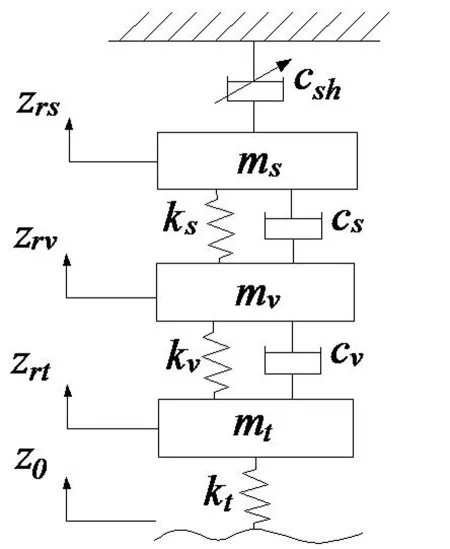
圖3 參考模型
由于本文的反步控制器基于參考模型設計,并且參考模型基于天棚阻尼系統設計,因此本文控制器被稱作天棚反步控制器。
2.1 基于天棚阻尼的參考模型設計
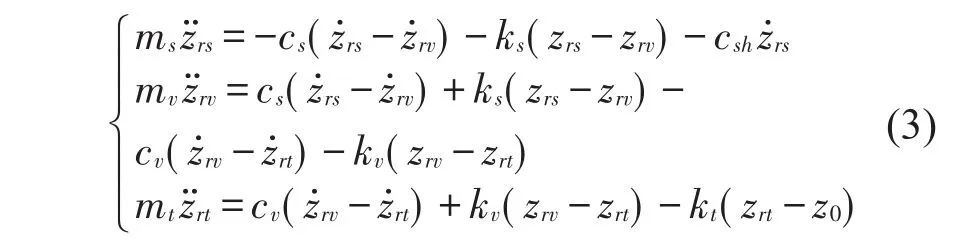
棚阻尼控制的思想使在車體和假設的“天棚”之間安裝一個天棚阻尼器,該阻尼器只起到耗能的作用,當阻尼系數達到一定值時,能獲取一定的減振效果。天棚阻尼控制雖然是假想模型,但是其具有非常好的減振效果,因此本文基于帶有天棚阻尼器的近似天棚阻尼系統設計參考模型,參見圖3。
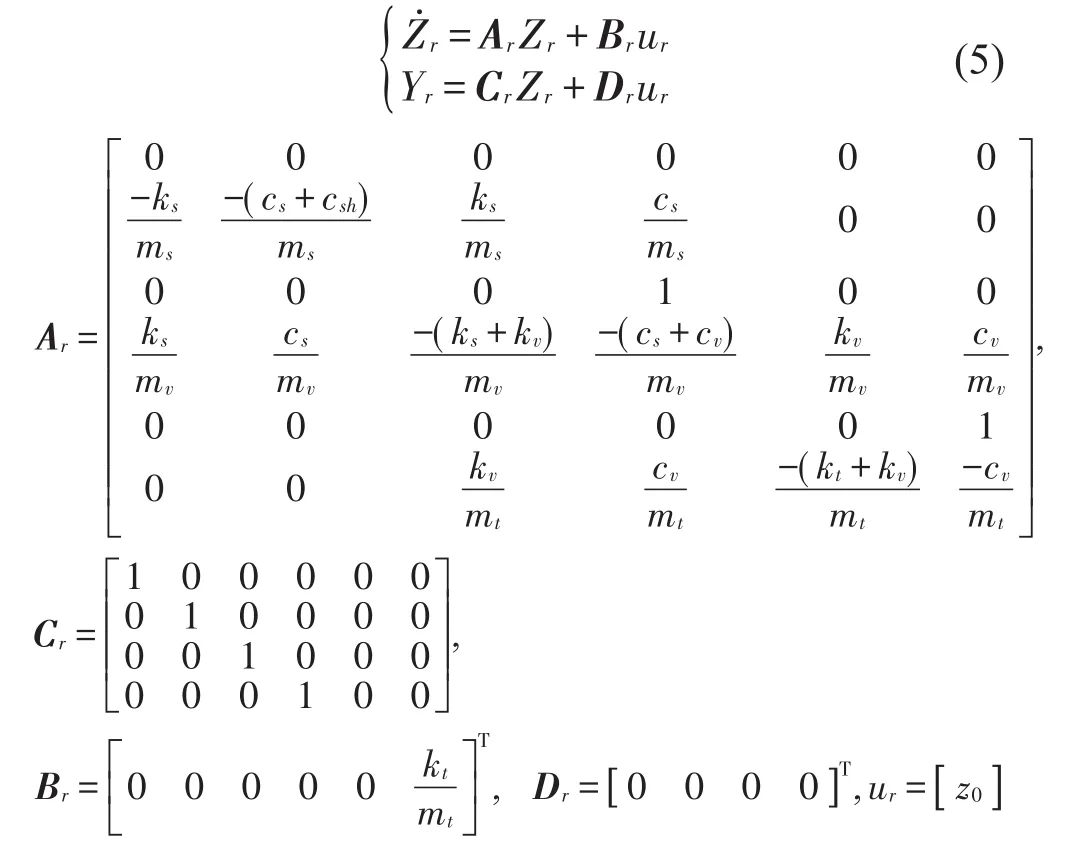
此參考模型的動力學方程為
所設計的參考模型并非理想天棚阻尼系統,本文將其設計成具有理想可控減振器的近似系統,即將csh設計成開關式阻尼

2.2 反步控制器的設計
在完成天棚參考模型的設計后,將實際系統和參考模型間的廣義狀態跟蹤誤差矢量中的加速度分量引入到反步狀態中,將系統分解成不超過系統階數的子系統,并通過設計中間虛擬控制率使每個子系統都達到鎮定狀態,最終逐步后推完成整個控制律的設計。使實際被控系統有效而穩定的跟蹤參考模型,根據前述的座椅及參考模型的動力學模型,定義座椅懸架位移誤差的積分、座椅懸架位移誤差及速度誤差為廣義狀態跟蹤誤差矢量
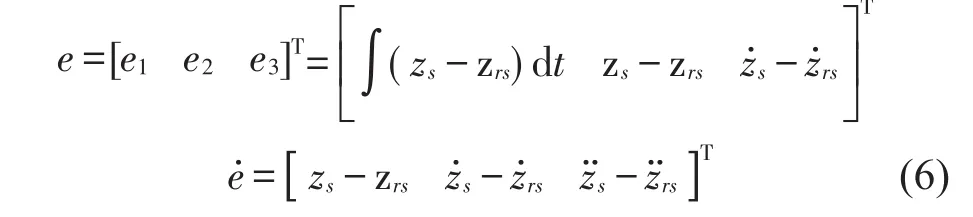
進一步把誤差動力學方程整理為矩陣形式
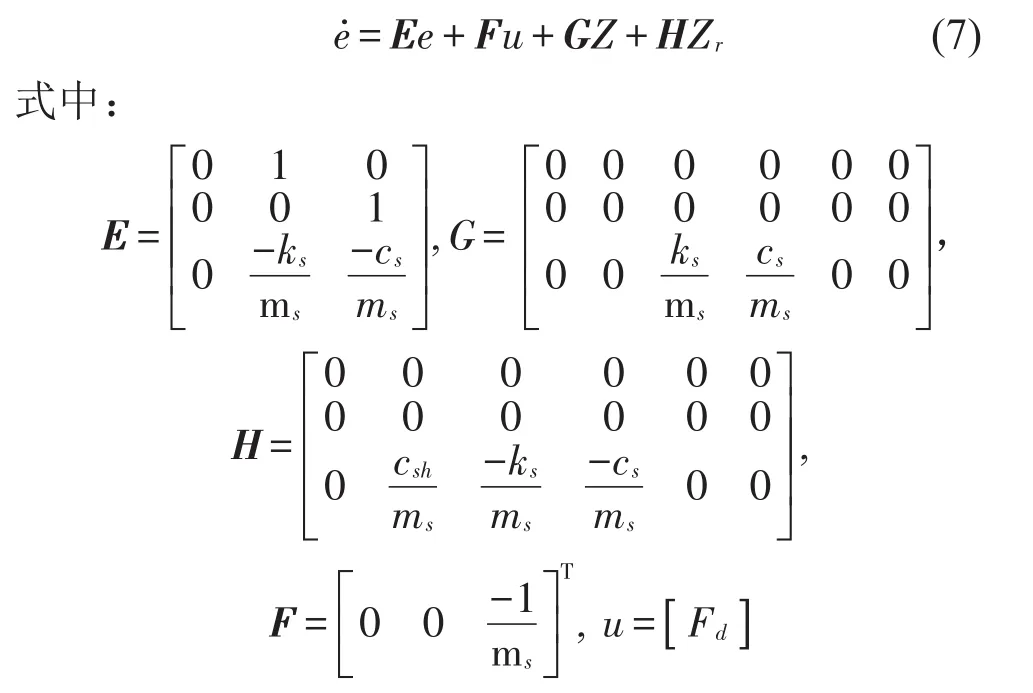
反步方法的基本思想是將復雜的非線性系統分解成不超過系統階數的子系統,然后為每個子系統設計部分的Lyapunov函數和中間虛擬控制律,前面的子系統利用后面子系統的虛擬控制達到鎮定,逐步后推完成整個控制律的設計。對于車輛懸架非線性系統,選取反步狀態變量
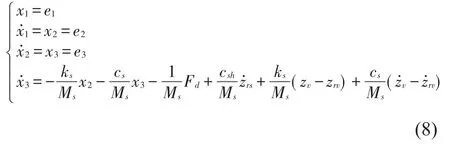
利用虛擬反饋定義3個誤差變量
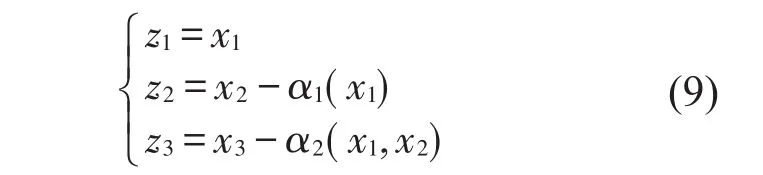
第一步:對z1求導,得同時定義得
顯然當z2=0時,z1漸進穩定。但是,由于通常情況下z2≠0,因而有必要進一步引入虛擬控制α2,以便使其誤差具有期望的漸進性能。為此,進行下一步的設計。
第二步,選取
顯然,如果z3=0,那么z1、z2是漸近穩定的。然而,在大多數情形下,z3≠0,因此有第三步,選取


3 仿真驗證
為驗證所提出的天棚反步控制器的優化效果,運用MATLAB/Simulink進行仿真研究,其中車輪受到的路面激勵可以用微分方程表示為:式中,xr(t)為路面垂直位移輸入;f0為路面輸入的下截止頻率;G0為路面不平度系數;U0為車速;w(t)為輸入白噪聲。系統仿真參數設置見表1。
為驗證所設計的天棚反步控制器的控制效果,根據3自由度座椅懸架、參考模型及誤差系統的動力學方程,在MATLAB/Simulink里建立了系統的動力學模型進行仿真,圖4為座椅懸建系統的Simulink仿真模型圖。
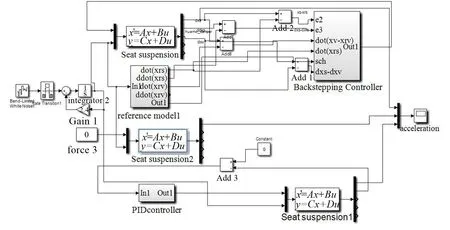
圖4 主動座椅懸架天棚反步控制仿真模型
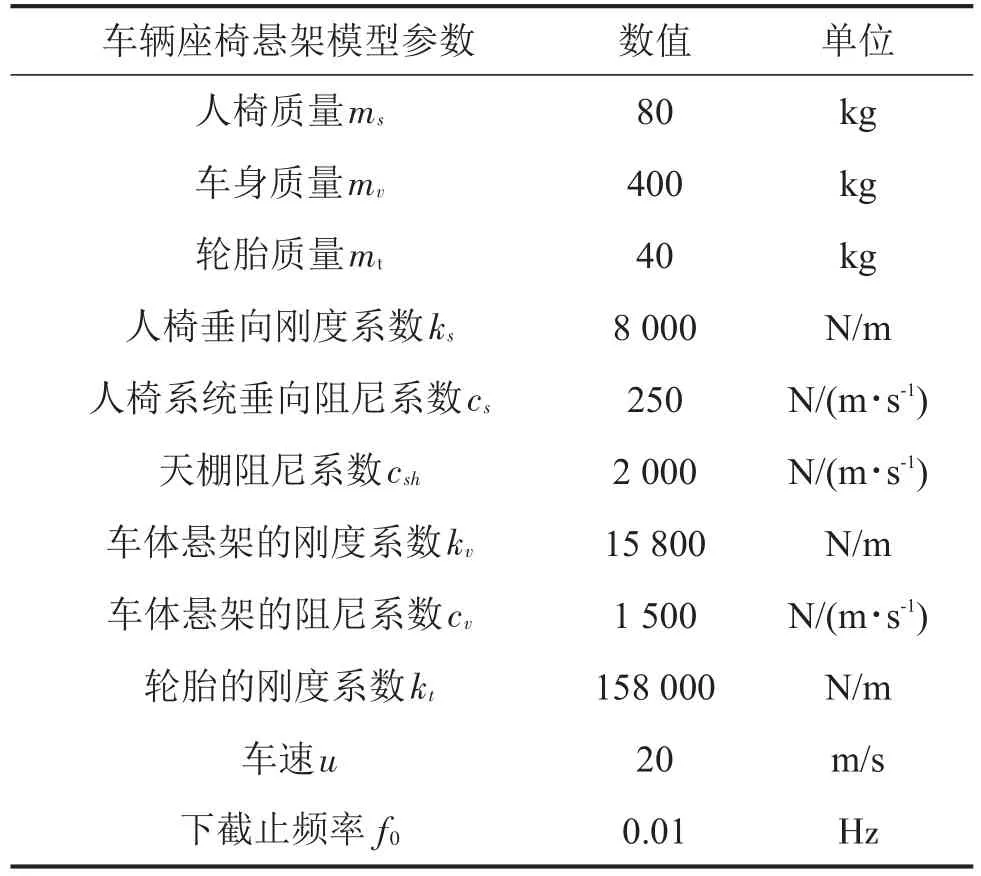
表1 座椅懸架仿真參數表
將天棚反步和被動系統及PID控制下的系統進行比較。圖5、圖6、圖7和圖8分別為座椅懸架的加速度、速度、動撓度和位移的仿真結果。
由以上各圖可以看出,基于近似天棚阻尼系統的反步控制器相比被動座椅懸架及PID控制的座椅懸架系統有明顯優勢。
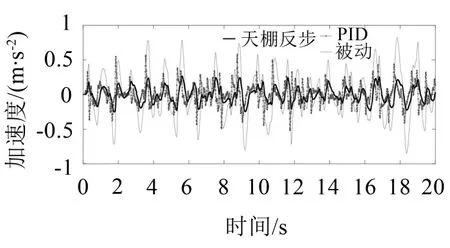
圖5 座椅懸架加速度結果
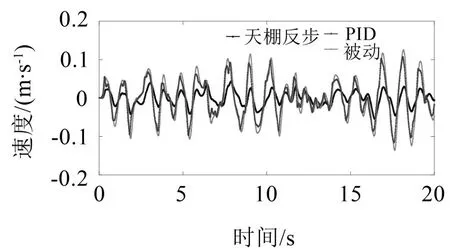
圖6 座椅懸架速度結果
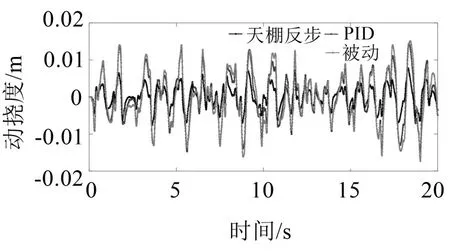
圖7 座椅懸架動撓度結果
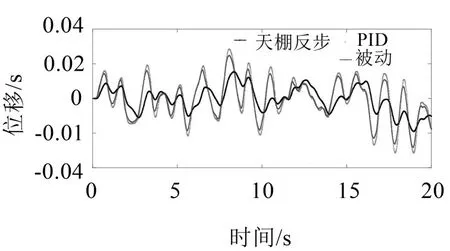
圖8 座椅懸架位移結果
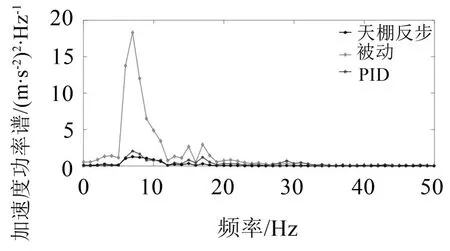
圖9 座椅懸架加速度功率譜結果
隨機路面激勵下的座椅懸架加速度功率譜密度見圖9,由圖可以看出,相比于PID和被動作用下的座椅加速度,在大部分頻率段內加速度有了明顯降低,改善了車輛運行的平順性。在車身共振(1 Hz~1.5 Hz)和椅面垂直最敏感(4 Hz~12.5 Hz)的低頻范圍內,天棚反步相比其他方法有效地降低了座椅的加速度,在4 Hz~8 Hz這個人體內臟器官易產生共振的頻率范圍內,天棚反步控制相比其他控制加速度均有明顯降低,進而減輕乘客的不適應性。
表2為基于近似天棚阻尼系統的反步控制器、被動座椅懸架及PID座椅懸架控制器的加速度和動撓度的最大值。由表2可知天棚反步的座椅懸架加速度較PID和被動懸架分別下降30.22%和66.1%,動撓度分別下降了8.9%和11.6%。由此可見此方法有效降低了車身振動對人體的影響,顯著提高了車輛懸架系統的動態舒適性。
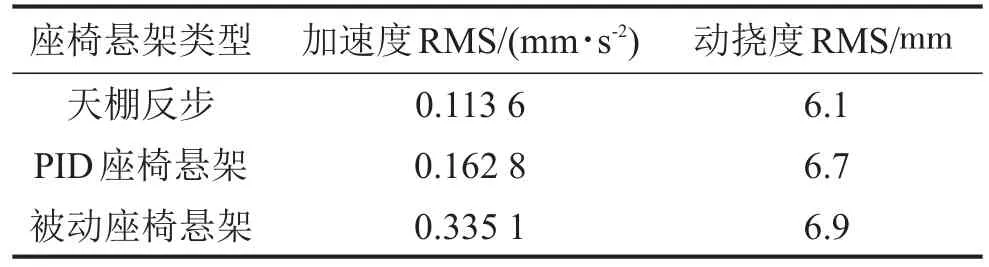
表2 不同懸架系統性能指標均方根值的對比
4 結語
本文以1/4車輛-座椅懸架為基礎,設計了用于主動座椅懸架的基于天棚阻尼控制的反步控制器,基于Simulink仿真進行了主動懸架和被動懸架對比測試,在控制中,主動懸架分別運用了天棚反步和PID控制方法,給出了不同測試條件下的控制結果,并對數據和圖表展開了分析和評價。仿真試驗結果表明:本文提出的天棚反步控制相比于PID控制及被動系統,座椅懸架的加速度分別下降了30.22%和66.1%,證實了此天棚反步控制器的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17