基于CEEMDAN與奇異值分解的往復機械故障診斷方法研究
2018-08-30 14:39:06別鋒鋒徐鵬青裴峻峰張仕佳
噪聲與振動控制 2018年4期
別鋒鋒,徐鵬青,裴峻峰,張仕佳
(常州大學 機械工程學院,江蘇 常州 213164)
往復機械廣泛應用于各類工業系統,由于其結構及工作環境較為復雜,因此,往復機械動力學特性難以分析[1]。一旦發生故障,輕則機器運轉異常,產生強烈噪聲與振動,重則導致人員傷亡,所以對往復機械故障的監測與診斷尤為重要[2]。由于往復機械部件繁多,結構復雜,運行環境惡劣,其振動信號往往會夾雜各種干擾成分,而且其信號本身具有很強的非線性、非平穩性,這些技術難題導致往復機械故障診斷無論在理論研究還是在診斷方法研究方面都存在著很大的不足[3]。N.E.Huang等在1998年提出的一種時頻分析方法,即經驗模態分解(Empirical Mode Decomposition,EMD)[4],該方法能將非平穩信號分解為若干個基本模式分量之和,因此被廣泛應用在振動信號特征提取中。然而EMD方法存在著模態混疊的缺點,為此HUANG和Yeh兩人先后提出了總體經驗模態分解(Ensemble Empirical Mode Decomposition,EEMD)[5]和一種補充的總體經驗模態分解方法(Complementary Ensemble Empirical Mode Decomposition,CEEMD)[6]。但是這兩種方法在實際應用中也存在著不足,如當參數選擇不合理時,分解會出現較多的虛假分量。因此Torres M E針對這些問題提出了一種改進算法CEEMDAN(Complete Ensemble Empirical Mode Decomposition with Adaptive Noise),通過加入自適應的噪聲來減小模態混疊,并且能有效地減少計算時間,克服了EEMD和CEEMD的不足,具有一定的優越性[7]。
本文針對往復機械的振動信號特征難以提取的現狀,提出了一種基于CEEMDAN與奇異值相結合的方法來對往復機械故障診斷進行研究,采用CEEMDAN作為振動信號特征提取的工具,將分解得到的IMF分量的奇異值作為支持向量機(Support Vector Machine,SVM)分類器的特征向量,對SVM進行訓練,從而實現對往復機械故障模式的識別。本文第二部分采用該方法對實驗室往復泵的模擬故障進行分析,并與EEMD方法進行對比,驗證該方法的有效性。第三部分進一步對工程現場泥漿泵復雜工況下的多故障模式進行識別研究,從而進一步論證該方法對于往復機械振動信號特征提取的有效性。
1 原理方法
1.1 EEMD
EEMD算法是在克服EMD的模態混疊效應的基礎上提出來的[8]。EEMD算法利用高斯白噪聲的統計特性,使疊加了白噪聲的信號在不同頻率上具有連續性來解決模態混疊效應。它通過在原始信號上疊加高斯白噪聲,并且進行多次EMD分解后,將得到的IMF分量的均值作為最終結果[9]。假定一往復機械測得的原始振動信號為x(t)。
(1)在x(t)中加入白噪聲ni(t)

(2)對xi(t)進行EMD分解,從而得到各個IMF分量IMFm,p,其中IMFm,p為第m次加入白噪聲得到的第p個IMF分量
(3)重復(1)、(2)操作,計算M次分解得到的IMF分量的均值,即

1.2 CEEMDAN
CEEMDAN是在EEMD基礎之上提出的一種信號處理方法,將原始信號x(t)進行以下處理:
(1)通過EMD實現對xi(t)的一次分解得到第一個模態分量

(2)在第1階段(k=1)時計算第一個余量

(3)定義Ek表示通過EMD計算獲得的給定信號的第k個模態分量,wi(t)為滿足N(0,1)的白噪聲,分解信號直到得到第一個EMD模態分量,同時,定義第二個模態分量

(4)當k=2,3,4,…,K時,計算第k個余量


(6)重復步驟(4),直至余量不適合被分解時停止。
1.3 奇異值
因為可用奇異值表征矩陣的特征,因此,采用奇異值表征各個IMF特征矩陣A的特征,構建特征向量[10]。方法如下:設每個IMF分量由n個量組成,m個IMF分量組成m×n的矩陣A,必存在正交矩陣U∈Cm×m和V∈Cn×n,使得A=USVT,其中

且∑=diag(λ1,λ2,…,λr),r=rank(A),其矩陣A的奇異值由高往低排列,即λ1≥λ2≥…≥λr。由矩陣奇異值的性質可知,特征向量σ=(λ1,λ2,…,λr)唯一表征了通過CEEMDAN分解而得到的各個IMF系數矩陣的特征。各個IMF系數矩陣的奇異值可反映信號的特征,而奇異值組成的特征向量可以表征IMF系數矩陣的特征,所以該特征向量可以反映出信號的特征[11]。
1.4 支持向量機
支持向量機是Vapnik在1996年針對線性不可分的兩類問題的最優分類形式提出來的分類器,目標是找到一個最優分割超平面[12]。即通過構造分類超平面使兩類問題得到最優分割[13]。將奇異值組成訓練數據集合T={(xi,yi)/i=1,…,l},其中xi為奇異值,yi∈Y={+1,-1},i=1,…,l。將QP問題轉化為相應的對偶問題來解決

式中:C是懲罰參數,ξi是收縮變量。式(10)的對偶形式由式(9)表示
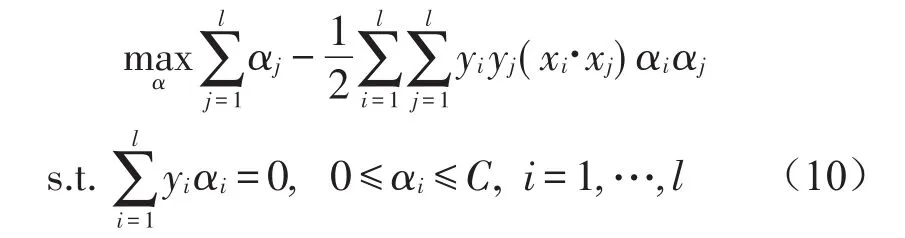
式中α∈Rl是Lagrangian因子。根據優化問題表達式(9)的解α*,可求得最優分類超平面的參數ω和b

式中:NSU代表支持向量個數,最終的判定函數為

通過判定函數f(x)來對特征值進行分類。
2 臂板實驗論證
2.1 實驗方法
使用靈敏度為102 mV/g的加速度傳感器進行信號采集,采樣頻率為2 000 Hz,通過對實驗室往復泵進行實驗仿真,分別模擬往復泵在正常狀態下與軸瓦磨損故障狀態下的運動情況,故障一為軸瓦輕微磨損,故障二為軸瓦嚴重磨損,分別提取其振動信號并分析研究,并且通過比較CEEMDAN與EEMD兩種分解方法的處理結果,來驗證該方法的有效性。
采用CEEMDAN-SVD結合支持向量機的信號處理方法對往復機械進行故障診斷,具體的流程圖如圖1所示。
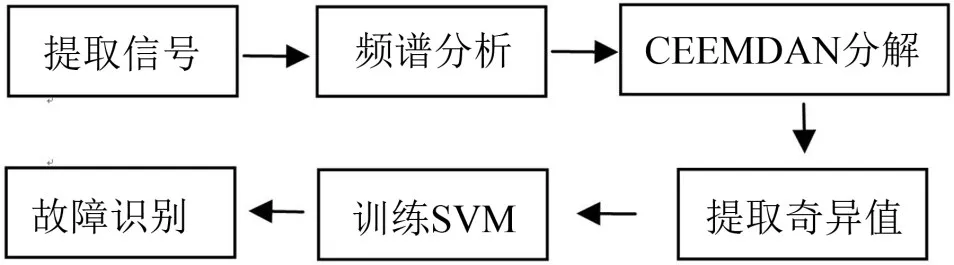
圖1 故障診斷流程圖
2.2 實驗仿真
實驗平臺如圖2所示,包括往復泵、加速度傳感器、Iotech640系列掌上型動態信號分析儀以及PC端,并在如圖2所示位置進行試驗測點的布置。
首先對加速度傳感器采集到的信號進行CEEMDAN分解。
由圖4、圖5可知,采用CEEMDAN分解方法將原始非平穩信號分解成若干個平穩的IMF分量,根據CEEMDAN的特性,前8個IMF分量與原信號的相關性較大,可以表征出原始信號中故障信息的主要特征,因此本文提取前8個IMF分量做進一步分析。
采用奇異值表征前8個IMF分量的特征向量。

圖2 試驗平臺布置圖

圖3 測點布置圖
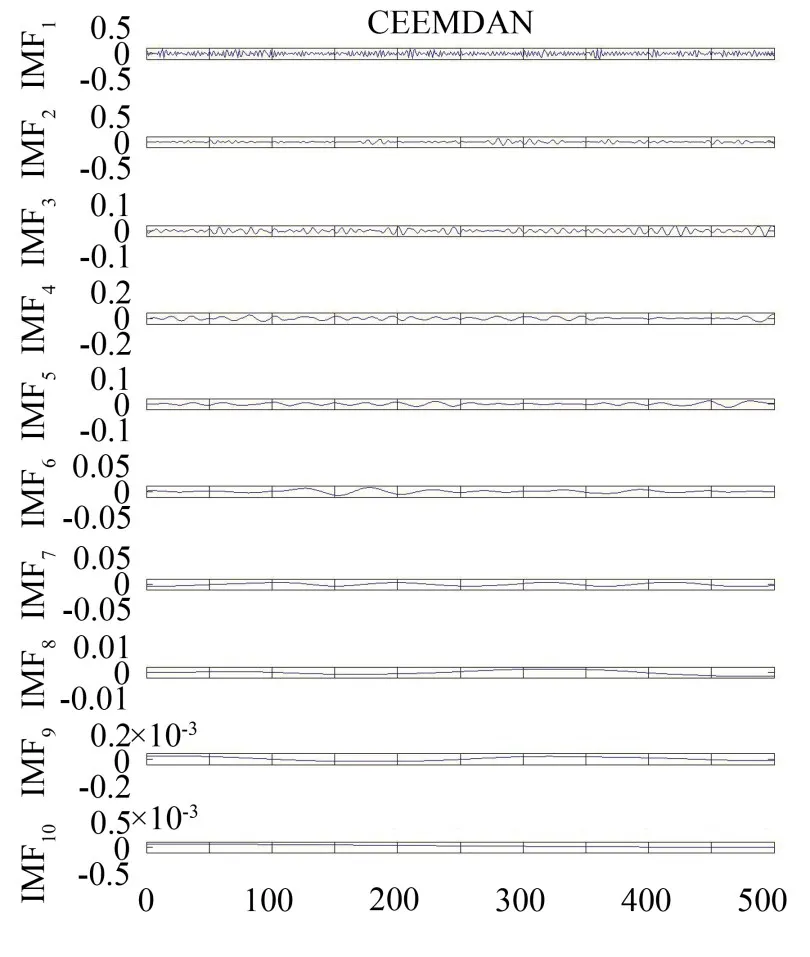
圖4 正常狀態
由表1的前3個IMF分量,可以清晰地看出正常工況下的奇異值與故障狀態下的奇異值有明顯不同,故障狀態下的振動信號與正常狀態下相比具有更大的奇異值。
為了更好驗證該方法的有效性,對正常、故障一和故障二信號各提取10組,組成30組樣本。將提取到的30組經CEEMDAN分解的奇異值樣本進行試驗。訓練SVM多故障分類器時,抽取15組樣本用于訓練,其余15組用于測試。訓練時,將選取的正常信號樣本視為+1,故障一信號的樣本視為0,故障二信號的樣本視為-1。
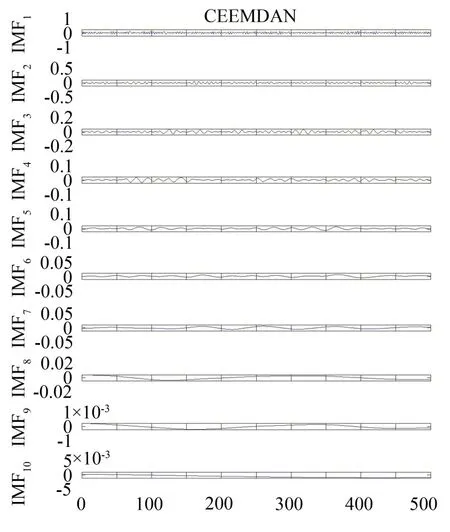
圖5 故障狀態

表1 特征向量
如圖6所示,SVM識別結果表明通過CEEMDAN分解,往復泵的故障均被識別。為了能和CEEMDAN進行對比,本文選擇經EEMD分解的IMF1-IMF8的奇異值作為另一組樣本進行SVM多故障分類器測試。
如圖7所示,對比結果表明,通過CEEMDAN分解的樣本識別率達到100%,而通過EEMD分解的樣本識別率只有86.7%,實驗結果表明CEEMDAN分解的精確率更高,分解效果更好。
通過上述實驗,表明CEEMDAN分解方法對往復泵不同程度故障有著很好的處理效果,對比實驗也顯示出改進方法的優越性。為了進一步驗證該方法的有效性,將該方法運用于工程中,驗證該方法對于故障沖擊特征的識別率。
3 工程實際論證
3.1 試驗方法
采用3NB-1300泥漿泵動力端作為研究對象,通過使用掌上型動態信號分析儀和加速度傳感器等設備進行振動信號的采集,識別故障的類型。

圖6 經CEEMFAN分解后故障識別圖

圖7 經EEMD分解后故障識別圖
在如圖8所示測點位置布置加速度傳感器,采集泥漿泵振動信號。

圖8 泥漿泵測點布置及傳感器和測試儀器
泥漿泵轉速為1 200 r/inm,采樣頻率為5 000 Hz,采樣點為5 000。分別提取具有正常、故障一、故障二和故障三四種狀態的加速度傳感器所測得的振動信號,用本文所提出的方法進行分析,獲取特征分量信號的奇異值特征值,并利用支持向量機進行分類和故障模式識別。
3.2 信號分析
首先對采集到的振動信號進行頻譜分析。
在上述四種頻譜圖中,圖9中能量主要集中在500 Hz以內。

圖9 正常信號頻譜圖
圖10中能量最高峰明顯比圖8更明顯。
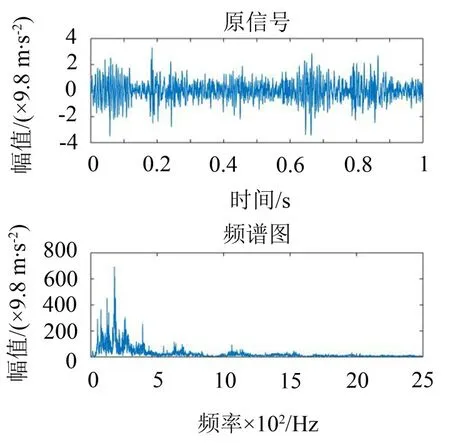
圖10 故障一頻譜圖
圖11中能量分布較為分散,最高峰分別在200 Hz與2 100 Hz處。而圖12在100 Hz處有極強的能量產生,由根據能量的不同分布可以判斷泥漿泵是否含有故障,但是并不能準確識別泥漿泵的故障類型,因此,需要進一步進行特征提取與分析。
首先,對信號進行CEEMDAN分解,采用奇異值表征各個IMF分量的特征向量。
由表2可以看出,正常狀態下與故障狀態下的奇異值存在著顯著差異。為了更好地分析識別方法的有效性,基于特征提取結果建立訓練樣本集,并將其應用于SVM。將采集到的80組信號樣本分別對應正常信號、故障一、故障二、故障三進行試驗,選圖14為泥漿泵SVM故障模式識別圖,由圖可知用于測試的40組樣中本僅一組未被識別,識別率取40組特征向量輸入支持向量機用于訓練,訓練時,正常樣本視為+1,故障一樣本視為0,故障二樣本視為-1,故障三樣本視為-2,其余40組作為測試樣本輸入,分別對應正常、故障一、故障二和故障三等四種狀態。

圖11 故障二頻譜圖
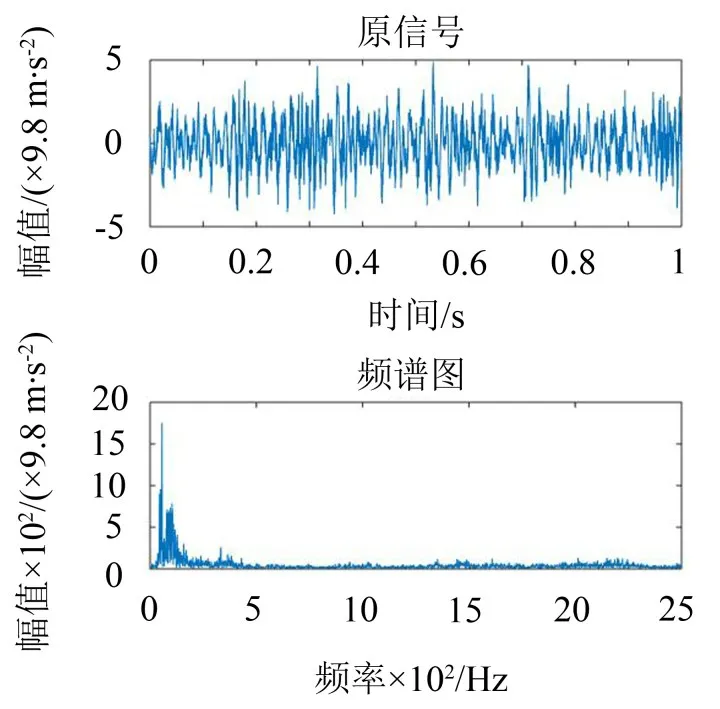
圖12 故障三頻譜圖
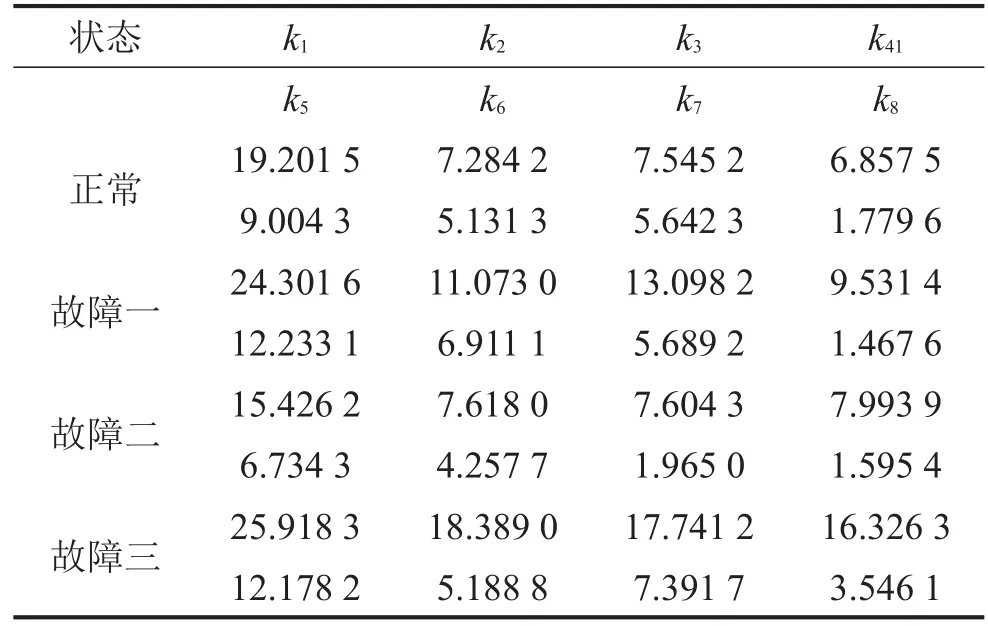
表2 特征向量
圖14為泥漿泵SVM故障模式識別圖,由圖14可知用于測試的40組樣本中僅一組未被識別,識別率達到97.5%,證明該方法在工程應用中能有效識別故障特征。
通過工程現場拆卸診斷可知,故障一、故障二、故障三分別是由三種不同的故障引起的,由此可知該判斷方法的準確性。上述分析表明,對原始振動信號進行CEEMDAN分解,提取各個IMF分量的奇異值作為特征向量,由特征向量可反映振動信號的能量變化,用于往復泵的故障診斷。

圖13 信號的CEEMDAN分解

圖14 泥漿泵故障識別圖
4 結語
針對往復機械振動信號的非線性、非平穩性,本文提出了一種基于CEEMDAN-SVD的信號處理方法,并以SVM信號識別來驗證方法的有效性。利用CEEMDAN將往復泵與泥漿泵故障狀態振動信號分解,以奇異值描述代表故障主要信息的各個IMF分量形成特征向量,并以SVM作為模式分類器識別故障類型。從實驗仿真到工程實例以及與EEMD的對比實驗,均表明基于CEEMDAN-SVD與SVM相結合的判斷方法能有效對往復機械的工作狀態和故障類型進行識別,具有良好的準確性與穩定性,因而更適用于非平穩性故障模式識別。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
汽車維修與保養(2015年6期)2015-04-17 03:31:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
汽車維護與修理(2015年2期)2015-02-28 12:15:39
計算物理(2014年2期)2014-03-11 17:01:44